제한 속도 하에서 최소 시간 양자 운반 최적 제어
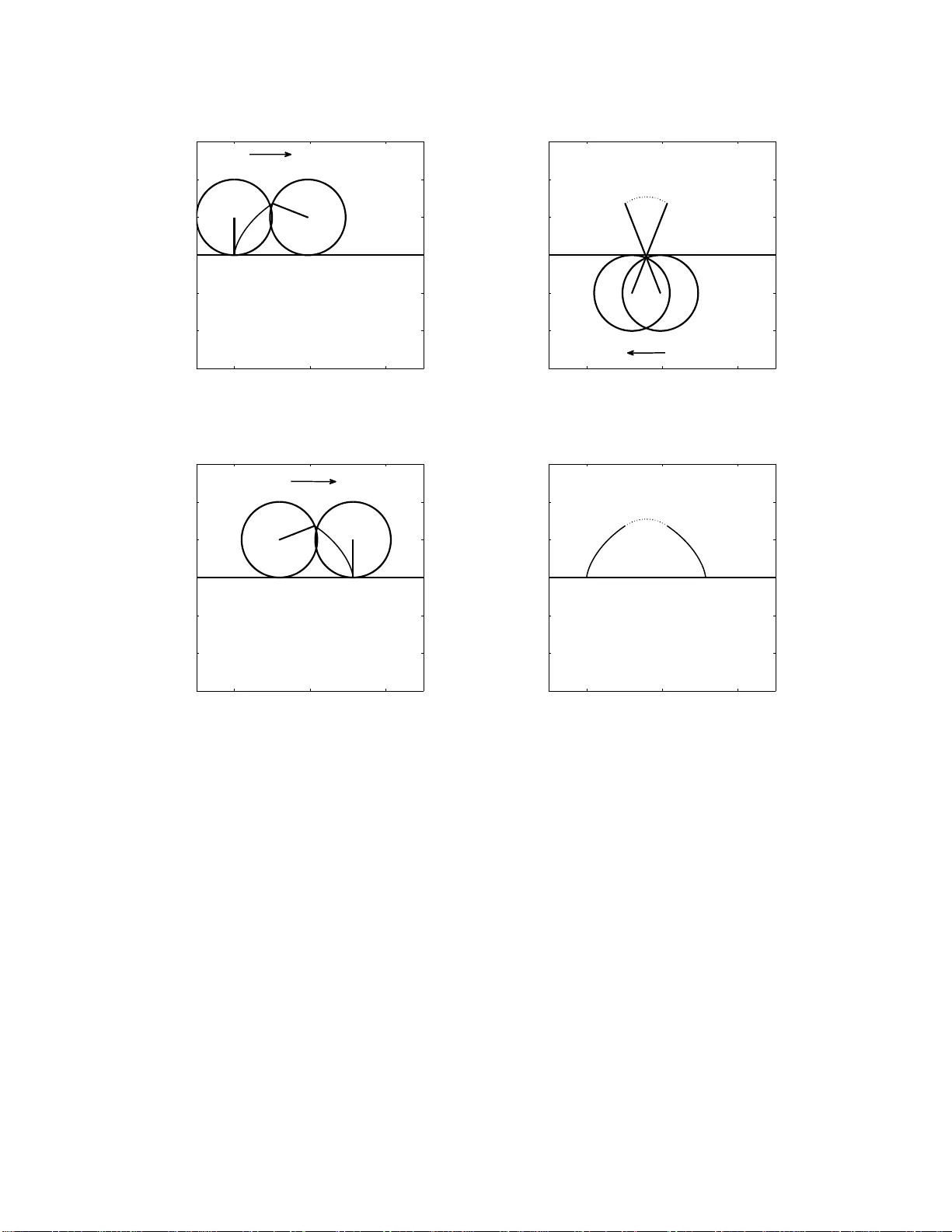
본 논문은 이동 가능한 조화 진동자 포텐셜에 갇힌 양자 입자를 제한된 트랩 속도로 옮기는 문제를 선형 시스템의 입력 제한 최소 시간 제어 문제로 모델링하고, 포인카레 최적 원리를 이용해 해를 완전히 구한다. 최적 해는 ‘bang‑bang’ 형태의 제어이며, 궤적은 회전하는 원이 굴러가는 트로키드 형태로 나타난다. 결과는 양자 컴퓨터의 큐비트 전송 및 베이시온-아인슈타인 응축체(BEC) 운반 등에 직접 적용 가능하다.
저자: Dionisis Stefanatos, Jr-Shin Li
본 논문은 양자 입자를 잡아두는 조화 진동자 포텐셜이 제한된 속도로 이동할 때, 입자의 파동함수가 초기와 동일한 고유 상태 점유 확률을 유지하면서 목표 위치 d 로 이동하는 ‘마찰 없는’ 전송 문제를 다룬다. 먼저, Schrödinger 방정식에 대한 해를 ψ(x,t)=e^{i(m·˙a·x+φ_n)} Ψ_n(x−a) 형태로 가정하고, a(t) 가 ¨a+ω²(a−s)=0 을 만족하도록 설정한다. 이 식은 트랩 중심 s(t)와 파동함수 중심 a(t) 간의 동역학적 연관을 나타내며, 경계 조건 a(0)=0, ˙a(0)=0, a(T)=d, ˙a(T)=0 을 만족하면 모든 고유 상태에 대해 전역 위상 차이만 존재하는 전송이 보장된다.
이를 선형 제어 문제로 변환하기 위해 상태 변수와 제어를 정의한다.
- x₁=ωV·a, x₂=V·˙a, x₃=ωV·s
- u=v/V (v는 트랩 속도)
시간을 t←ωt 로 스케일링하면 시스템은 ˙x = A x + b u 형태가 된다. 여기서 A와 b는 각각 3×3 행렬과 3×1 벡터이며, 시스템은 ‘단일 입력, 다중 상태’ 구조를 가진다. 목표는 초기 상태 (0,0,0) 에서 최종 상태 (γ,0,γ) (γ=ωd/V) 로 최소 시간 T 에 도달하는 것이다.
제어 가능성은 칼만 행렬
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기