디지털 자기유발 강인 제어를 통한 비선형 시스템 안정화
본 논문은 비선형 시스템에 대한 디지털 자기유발 제어(self‑triggered control) 방식을 제안한다. 무교란 시스템에 한정된 작동 지연이 존재할 때는 안정성을 보장하고, 파라미터 불확실성·외란이 존재하는 경우에는 상태를 사전에 정의한 안전 영역 안에 유지한다. 각 샘플링 시점은 현재 상태에 기반해 계산되며, 최소 샘플링 시간과 허용 가능한 최대 지연을 명시적으로 구한다. 예시를 통해 고정 샘플링 대비 평균 샘플링 간격이 크게 늘어나…
저자: M.D. Di Benedetto, S. Di Gennaro, A. DInnocenzo
본 논문은 무선 네트워크 기반 제어 시스템에서 배터리 혹은 환경 에너지에 의존하는 센서들의 전력 소모를 최소화하기 위해, 상태 측정과 제어 신호 전송을 ‘필요할 때만’ 수행하는 자기유발(self‑triggered) 제어 방식을 비선형 시스템에 적용하는 방법을 제시한다.
1. **문제 정의**
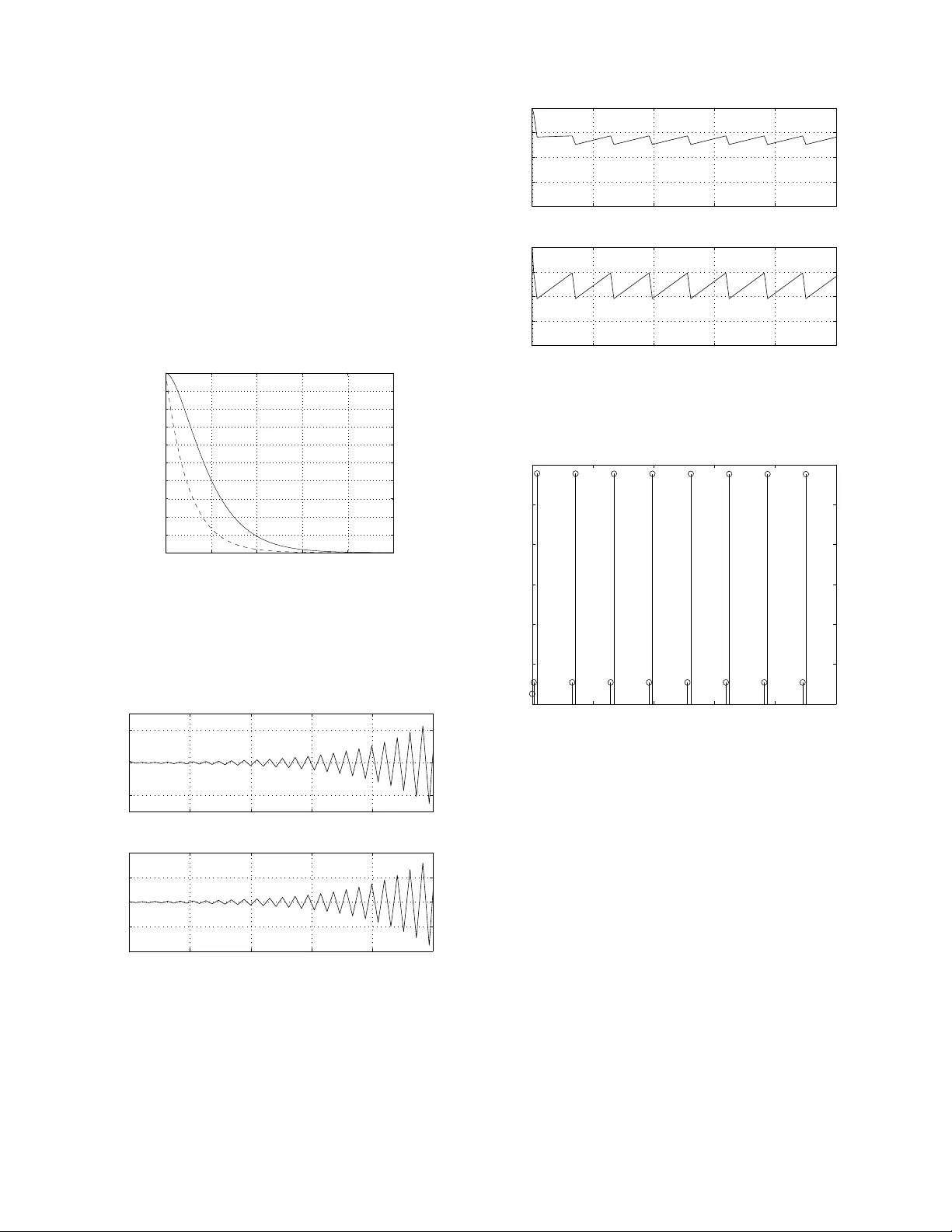
- 시스템 모델: ˙x = f(x,u,μ,d) 로, x∈ℝⁿ, u∈ℝᵖ, μ는 파라미터 불확실성, d는 외란이며 모두 콤팩트 집합에 제한된다.
- 제어 목표: (a) 무교란·무지연 상황에서 원점의 전역(또는 지역) asymptotic stability 확보, (b) 불확실·외란 존재 시 사전 정의한 안전 집합 B_δ 안에 상태를 유지(safety).
- 측정·제어는 이산적인 샘플링 시점 t_k 로 제한되고, 각 샘플링 후 제어 신호는 일정 지연 Δ_k 후에 적용된다. Δ_k∈
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기