Digital Self Triggered Robust Control of Nonlinear Systems
In this paper we develop novel results on self triggering control of nonlinear systems, subject to perturbations and actuation delays. First, considering an unperturbed nonlinear system with bounded actuation delays, we provide conditions that guaran…
Authors: M.D. Di Benedetto, S. Di Gennaro, A. DInnocenzo
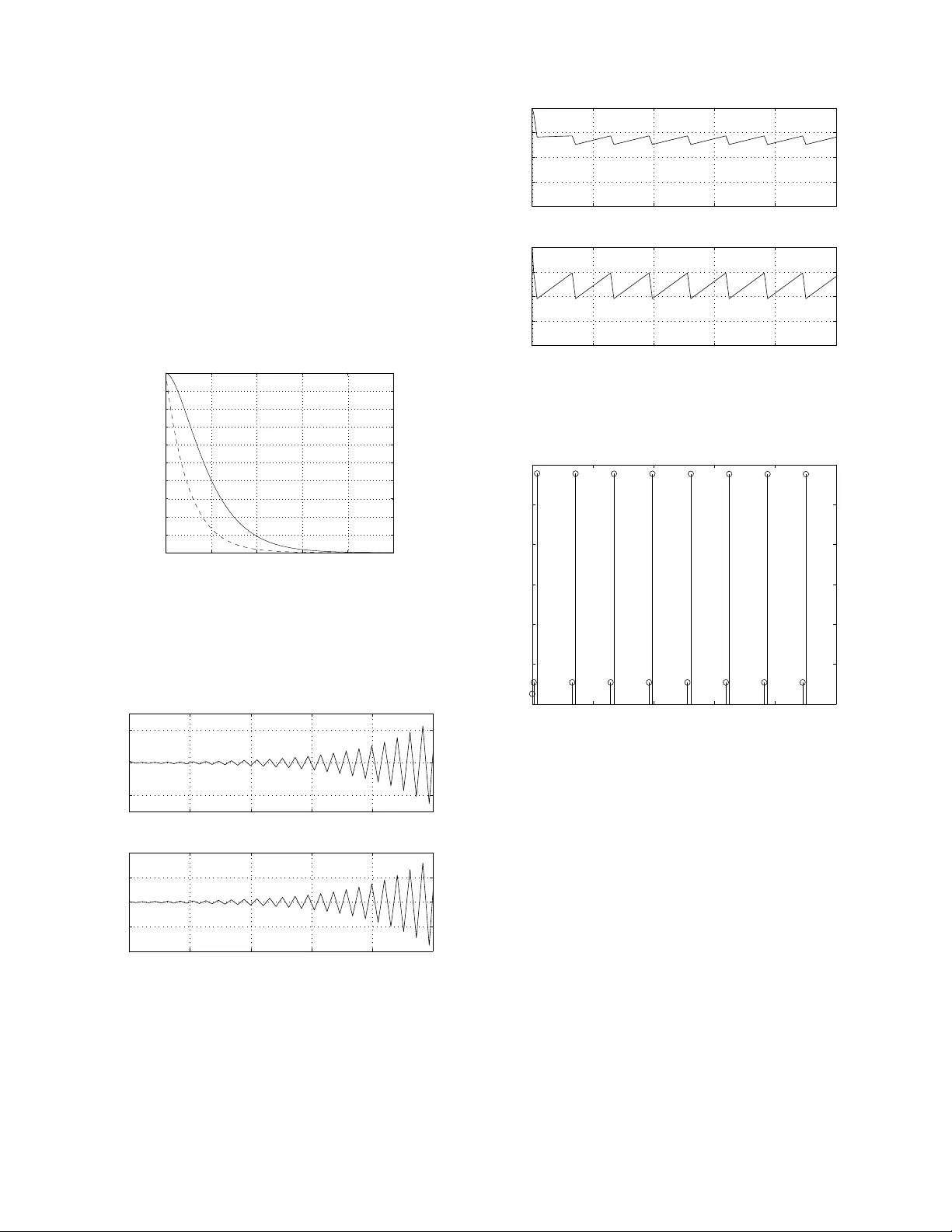
Digital Self T riggered Rob ust Control of Nonlinear Systems M.D. Di Benedetto, S. Di Gen naro, and A. D’Inno cenzo Abstract — In this paper we dev elop nove l results on self triggeri ng contr ol of n onlinear systems, subject to per turbations and actuation de- lays. First, consider ing an unperturbed nonlinear system with bounded actuation delays, we provi de conditions that guarantee the existence of a self trigge ring control strategy stabilizing the cl osed–loop system. Then, considering paramete r uncerta inties, disturbances, and bounded actuation delays, we pro vide conditions guaranteeing the existe nce of a self triggering strategy , that keeps the s tate arbitrarily close to the equilibr ium point. In b oth cases, we provide a methodology f or the computation of the next execution time. W e show on an example the rele vant benefits obtained with this approach, in terms of energy consumption, with respect to control algori thms based on a constant sampling, with a sensible reduction of the a verage sampling time. Index T erms — Contr ol over networks; Control under computatio n constraints; Sensor networks. I . I N T R O D U C T I O N W ireless network ed control systems are spatially distributed control systems where the communication between sensors, actu- ators, and computational units is supported by a shared wireless communication network [7]. The use of wireless network ed control systems in industrial automation results in flexible architectures and generally reduces installation, deb ugging, diagnostic and mainte- nance costs wi th respect to wired networks. The main motiv ation for studying such systems is the emerging use of wireless tech- nologies in control systems, see e.g. [1], [15] and references therein. Although wireless networks offer many advan tages, communication nodes generally consist of battery po wered de vices. For this reason, when designing a con trol scheme closed on a wireless sens or network, it is fundamental t o adopt power aware control algorithms to reduce power consumption. In other applications, the energ y is obtained from the environ ment, wi th a sca venging system, since it is not possible to provide these wi reless sensors with batteries. An examp le of such a case is notably give n by the so–called i ntelligent (or smart) tires, equipp ed with sensors embe dded in the tread, gi ving information on pressure, road–tire friction, etc. [14], [11], [4]. In this case the sensors are supp lied by the energy provided by the tire motion. It is clear that it is fundamental to trigger wi reless transmission only when necessary , to pre vent ener gy shortage and, possibly , to reduc e t he probability of information packe t losse s during the transmission. W ith the aim of addressing the abo ve issues in the controller design phase, self tr iggered control strategies have been introdu ced in [19], where a heuristic rule is provided to self–trigger the next ex ecution time of a control task on the b asis of the last measurement of t he state. In [9], [10], a robust self triggered strategy is proposed, which guarantees that the L 2 gain of a li near ti me i n v ariant system The research leading to these results has rece iv ed funding from t he European Union Sev enth Frame work Programme [FP7/2007-2013] under grant agreement n257462 HYCON2 Network of excelle nce. The authors are with the Department of Electrical and Information Engineeri ng, and Center of Excel lence DEWS, Uni versity of L ’Aquila, V ia G. Gronchi 18, 67100, L ’Aquila , Italy . E .mail: { maria- domenica.diben edetto, stefano.digennaro, alessandro. dinnocenzo } @univa q.it . is kept under a giv en threshold. In [12] a self t riggering strategy distributed ov er a wireless sensor network is proposed for linear time in va riant plants. In [16] suf ficient conditions for the e xistence o f a stabilizing e vent–triggered control strategy are given for non -linear systems. In [3] the authors propose a self–triggered emulation of the ev ent– triggered control strategy proposed in [16]. In particular a method- ology f or the computation of the ne xt ex ecution time as a function of the last sample is presented, under a homoge neity condition. W e extend the pre vious resu lts in tw o directions. F irst, with regard to asymptotic stability under digital self triggered control, we propose a methodology for the computation of the next ex ecution time by replacing the homog eneity assumption wi th the requiremen t that the nonlinear dif ferential equa tions and the control law are C ℓ functions, with ℓ sufficiently large. The digital control, ensuring asymptotic stability , ha ve been derived for unperturbed non linear systems affected by bounded actuation delays, under the necessary condition of e xistence of a continuo us stabilizing control. With respect to pre vious results [3], the approach proposed in this wo rk allows computing the stabilizing exe cution time sequence for a broader class of systems. In a recent work in progress [17 ] a new technique is dev eloped to compute the next ex ecution t ime for smooth systems b y exploiting the concept of isochro nous manifolds. Our technique is based on polynomial approximations of Ly apunov functions, and therefore differs from t he one de velope d in [17]. Second, we consider non–linear systems perturbed by norm– bounded parameter uncertainties and disturbances, and affected by bounded actuation delays. W e prov e that, under weake r conditions than those used in [16], a self triggering strategy exists keeping the state in a ”safe set” arbitrarily close to the equilibrium point. T o the best of the authors’ kno wledge, this i s t he first work that provid es resu lts on self- triggering control for no n-linear systems with uncertainties, disturbances and actuation delays. Finally , we show on a significant example that the results obtained introduce str ong benefits in terms of ener gy consumption, with respect to digital controls based on a constant sampling time, by reducing the av erage sampling time. The paper is organ ized as follo ws. In S ection II, we il lustrate the mathematical model and the problem formulation. In Section III, we deri ve results for the asymptotic stability of unperturbed systems, while in Section IV we consider the safety problem of perturbed systems. I n S ection V, we apply the obtained results to an example. I I . P R O B L E M F O R M U L AT I O N Consider a generic nonlinear system ˙ x = f ( x, u, µ, d ) (1) where x ∈ D x ⊂ R n , D x a domain containing the origin, u ∈ D u ⊂ R p , µ is a parame ters uncertainty vector v arying in a comp act set D µ ⊂ R r , with 0 ∈ D µ , d is an external boun ded disturbances vector taking v alues in a compact set D d ⊂ R s , with 0 ∈ D d . W e define the nominal system associated t o the perturbed system (1) by ˙ x = f 0 ( x, u ) . = f ( x, u, 0 , 0) . (2) Giv en a state feedback control law κ : D x → D u , the closed loop perturbed system is ˙ x = f ( x, κ ( x ) , µ, d ) , (3) and the closed loop nominal system is ˙ x = f 0 ( x, κ ( x ) ) . (4) W e will den ote by x ( t ) , t ≥ t 0 , the solution of the closed loop system (3) (or ( 4), acco rding to the context), with initial condition x 0 = x ( t 0 ) . It is well –kno wn that if the origin of system (4) is locally asymptotical stable for a certain feedback κ , and if f 0 ( x, κ ( x ) ) ∈ C ℓ ( D x ) , ℓ > 1 integer , then there exists a L yapunov function V ( x ) of class C 1 ( D x ) such that α 1 ( k x k ) ≤ V ( x ) ≤ α 2 ( k x k ) ∂ V ( x ) ∂ x f 0 ( x, κ ( x )) ≤ − α 3 ( k x k ) ∂ V ( x ) ∂ x ≤ α 4 ( k x k ) (5) with α 1 , α 2 , α 3 , α 4 ∈ K [20] , [8], [6]. In t he following definition, an inv ari ant property i s used to define that a system is safe with respect to a gi ven subset of the state space. Definition 1: Given a st ate feedback control law κ , system (3 ) is safe with respect to the set S ⊆ D x for the t ime interval T ⊆ R + , if x ( t ) ∈ S , ∀ t ∈ T . ⋄ The f eedback control signal u ( t ) = κ ( x ( t )) requires continuous measurements of the state of the system. In this paper , we address the stability and safety problems defined belo w , when the measure- ments are performed at sampling instants t k , defining a sequence I = { t k } k ≥ 0 , and the applied control signal is u I ( t ) = ( 0 ∀ t ∈ [ t 0 , t 0 + ∆ 0 ) κ ( x ( t k )) ∀ t ∈ [ t k + ∆ k , t k +1 + ∆ k +1 ) , k ≥ 0 where { ∆ k } k ≥ 0 is the seque nce of actuation delays, due to the transmission time from the sensor t o the controller , the computation time, and the transmission time from the controller to the actuator . W e assume that ∆ k ∈ [0 , t k +1 − t k ) , ∀ k ≥ 0 , which is a natural requirement in practice. Pr oblem 1: (Stability problem) Giv en the nominal system (2), and a stabilizing state feedback control law κ , determine 1. A minimum sampling ti me τ min > 0 ; 2. A function τ s : D x → [ τ min , ∞ ) ; 3. A maximum allowed delay ∆ max > 0 ; such that if the sequence of sampling instants I is inducti vely defined by t k +1 = t k + τ s ( x ( t k )) (6) and if the actuation delays are such that ∆ k ∈ [0 , ∆ max ) , ∀ k ≥ 0 (7) then t he origin of the closed l oop system (4) with control input signal u I ( t ) is asymptotically stable. ⋄ Pr oblem 2: (Safety problem) Giv en the perturbed system (1), a stabilizing stat e feedback control law κ , and an arbitrary safe set B δ = { x ∈ R n | k x k < δ } ⊂ D x , determine τ min , τ s and ∆ max as defined in P roblem 1) such that if I is inducti vely defined by (6) and if ∆ k satisfies (7), then the closed loop system (3) wi th control input signal u I ( t ) is safe w ith respect to B δ , for the time interv al [ t 0 , ∞ ) . ⋄ In P roblems 1 and 2, the function τ s is used to determine the next sampling instant as a function of the current measurement of the system. W e require that the ti me interval between two sampling instants is lo wer bounded by a minimum sampling time τ min > 0 , in order to avoid undesired Zeno behav iors. W e also require that the system is robust with respect to actuation delays bounde d by ∆ max . By choosing the nex t sampling instant t k +1 as a function of the current measurement at time t k , we perform sampling only when needed for guaranteeing asymptotic stability or safety . The aim is to obtain a sequenc e of sampling instants I with the property that the inter–sampling time t k +1 − t k is as large as possible, in order to reduce transmission po wer of the se nsing and actuation data transmissions, and to reduce the CP U effort due to the computation of the control. In this paper we do not address the problem of the optimality of the solution: such a requirement can be taken into account by considering appropriate cost functions. I I I . S E L F T R I G G E R E D S TA B I L I Z I N G C O N T R O L The results de veloped in this Section are based on the f ollo wing assumption, analogou s to the assumptions used in [16]. Assumption 1: Assume that 1. f 0 ∈ C ℓ ( D x × D u ) , with ℓ a positiv e in teger sufficiently large; 2. T here exists a nonempty set U of state feedback laws κ : D x → D u , such that κ ∈ C ℓ ( D x ) and the origin of (4) is asymptotically stable, with reg ion of attraction a certain compact Ω ⊂ D x ; 3. T he functions α 3 , α 4 ∈ K in ( 5) are such that α − 1 3 , α 4 are Lipschitz. ⋄ The assumption of existence of a stabilizing control (i.e. non- emptiness of the set U ) is not restricti ve, since if the no minal system cannot be stabilized us ing con tinuous time measurement and actuation, then it is clear that t he nominal system cannot be stabilized using a digital control with zero–order holders. The main limitation of Assumption 1, and those used in [ 16], i s the Lipschitz condition on α − 1 3 ( · ) and α 4 ( · ) . W e will show ho w to weaken this assumption in Section IV, which will be de voted to safety control. Ho wev er, note that the conditions of Assumption 1 are weaker than those used in [3] (homogeneity of the closed loop dynamics). Theor em 1: Let us consider the nominal system (2 ). Under As- sumption 1, there ex ist a state feedback control law κ , a minimum sampling time τ min > 0 , a function τ s : D x → [ τ min , ∞ ) and a maximum delay ∆ max > 0 , such that if I is inducti vely defined by (6), and ∆ k satisfies (7), then the origin of the closed loop system (4) with control u I ( t ) is asymptotically stable. ⋄ Pr oof: L et us first prove the result for ∆ k = 0 . S ince U is not empty , by Assumption 1, we pick a state feedback control law κ ∈ U . Si nce f 0 ( x, κ ( x )) ∈ C ℓ ( D x ) with ℓ > 1 , there exists a L yapuno v candid ate (5). Let us choose r > 0 such that the ball B r = { x ∈ Ω | k x k ≤ r } ⊂ Ω . For x k ∈ B r , ˙ V = ∂ V ∂ x f 0 ( x, κ ( x k )) = ∂ V ∂ x f 0 ( x, κ ( x )) + ∂ V ∂ x f 0 ( x, κ ( x k )) − f 0 ( x, κ ( x ) ) ≤ − α 3 ( k x k ) + α 4 ( k x k ) k d h k (8) where d h = f 0 ( x ( t ) , κ ( x ( t k ))) − f 0 ( x ( t ) , κ ( x ( t ))) is the perturbation due to the holding. Under Assumption 1, there ex ists a δ k > 0 such t hat ˙ x = f ( x, κ ( x k )) has a unique solution ov er [ t k , t k + δ k ] . Hence, we can expan d t he components d h,i of d h in T aylor seri es. Let us consider the i th componen t d h,i , i = 1 , · · · , n , of the n –dimensional vector d h . One can expand each compone nt in T aylor series with respect to t ∈ [ t k , t k + δ k ] , on the right of t k , up to t he 2 nd term, with t he Lagrange remainder of the 3 r d term [18] d h,i = ϕ 1 ,i ( x k )( t − t k ) + ϕ 2 ,i ( ¯ x i , x k )( t − t k ) 2 (9) where ϕ 1 ,i ( x k ) = d + d h,i d t x ( t )= x k ϕ 2 ,i ( ¯ x i , x k ) = 1 2 d 2 + d h,i d t 2 x ( t )= ¯ x i where d n + ( · ) d t n denotes the n –th right deriv ativ e. According to T aylor theorem with t he Lagrange remainder , there ex ists ¯ t i ∈ [ t k , t ] , with ¯ x i = x ( ¯ t i ) , i = 1 , · · · , n , such that the equality (9) holds. Hence, k d h k ≤ k ϕ 1 ( x k ) k ( t − t k ) + k ϕ 2 ( ¯ x, x k ) k ( t − t k ) 2 where ¯ x . = ( ¯ x 1 , · · · , ¯ x n ) and ϕ 1 ( x k ) . = ϕ 1 , 1 ( x k ) , · · · , ϕ 1 ,n ( x k ) T ϕ 2 ( ¯ x, x k ) . = ϕ 2 , 1 ( ¯ x 1 , x k ) , · · · , ϕ 2 ,n ( ¯ x n , x k ) T . Let us consider the lev el set Ω V ( x k ) , and define M 1 ( x k ) . = k ϕ 1 ( x k ) k , M 2 ( x k ) . = max ¯ x ∈ Ω V ( x k ) k ϕ 2 ( ¯ x, x k ) k . Since f , κ ∈ C ℓ and Ω V ( x k ) is compact, then M 1 ( x k ) is fi nite for any x k ∈ Ω V ( x k ) , and M 2 ( x k ) ∈ R + exists and is finite for any x k ∈ Ω V ( x k ) . Let us now check that t here exists a time interval [ t k , t k +1 < t k + δ k ] such that α 4 ( k x k ) k d h k ≤ ϑ α 3 ( k x k ) (10) is satisfied for a fixed ϑ ∈ (0 , 1) . In fact, (10) is satisfied if α − 1 3 ϑ − 1 α 4 ( k x k ) M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 ≤ k x k . Since α − 1 3 and α 4 are Lipschitz, then equation (10) is satisfied if ϑ − 1 L α − 1 3 L α 4 k x k M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 ≤ k x k where L α − 1 3 > 0 and L α 4 > 0 are the Lipschitz constants respecti vely of α − 1 3 and α 4 . The above equation directly implies that (10) is satisfied if M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 ≤ ϑL − 1 α − 1 3 L − 1 α 4 . (11) If we define τ s ( x k ) . = max t − t k | equation (11) is satisfied for each t − t k ∈ [0 , τ s ( x k )] τ min . = min x k ∈ Ω V ( x k ) τ s ( x k ) and we choose t k +1 = t k + τ s ( x k ) , then ˙ V ( t ) ≤ − (1 − ϑ ) α 3 ( k x k ) for all t ∈ [ t k , t k +1 ] and for all k ≥ 0 . This implies that the o rigin is asymptotically stable. Equation (11) is a second degree i nequality in the form a ( x k ) y 2 + by ≤ c , where a ( x k ) , b are non-neg ative and upper bounded for each x k ∈ D x , and c is strictl y positiv e and upper bounded. This trivially implies that τ s ( x k ) is strictly positiv e for each x k ∈ Ω V ( x k ) , and thus τ min is strictl y positiv e as well. This completes the proof for ∆ k = 0 . W e no w solve the problem for ∆ k > 0 . Following the same reasoning as abov e, for t ≥ t k + ∆ k ˙ V ( t ) = ∂ V ∂ x f 0 ( x ( t ) , κ ( x k )) = ∂ V ∂ x f 0 ( x, κ ( x )) + ∂ V ∂ x f 0 ( x ( t ) , κ ( x ( t k + ∆ k ))) − f 0 ( x, κ ( x )) + ∂ V ∂ x f 0 ( x ( t ) , κ ( x k )) − f 0 ( x ( t ) , κ ( x ( t k + ∆ k ))) ≤ − α 3 ( k x k ) + α 4 ( k x k ) k d h k + α 4 ( k x k ) k d ∆ k k where d h = f 0 ( x ( t ) , κ ( x ( t k + ∆ k ))) − f 0 ( x, κ ( x )) d ∆ k = f 0 ( x ( t ) , κ ( x k )) − f 0 ( x ( t ) , κ ( x ( t k + ∆ k ))) are the perturbation due to the holding and to the actuation delay . Since also the solution x ( t ) is Lipschitz, as well as f 0 and κ k d ∆ k k ≤ M 3 ∆ k , M 3 = L f 0 L κ L x where L f 0 , L κ , L x are the Lipschitz constan ts of f 0 , κ , x . Proceeding for d h as in the previous case, we conclude that (10) is satisfied if M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 + M 3 ∆ k ≤ ϑL − 1 α − 1 3 L − 1 α 4 (12) Let ϑ = ϑ 1 + ϑ 2 , with ϑ 1 , ϑ 2 ∈ (0 , 1) and ϑ 1 + ϑ 2 < 1 . W e can rewrite equation (12) as follows M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 + M 3 ∆ k ≤ ϑ 1 L − 1 α − 1 3 L − 1 α 4 + ϑ 2 L − 1 α − 1 3 L − 1 α 4 . (13) Equation (13) implies that the stability condition (10) holds if M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 ≤ ϑ 1 L − 1 α − 1 3 L − 1 α 4 , (14) and ∆ k ≤ (1 − ϑ 1 ) M − 1 3 L − 1 α − 1 3 L − 1 α 4 . (15) Defining τ ′ s ( x k ) . = max t − t k | equation (14) is satisfied for each t − t k ∈ [0 , τ ′ s ( x k )] τ min . = min x k ∈ Ω V ( x k ) τ ′ s ( x k ) ∆ max . = min n (1 − ϑ 1 ) M − 1 3 L − 1 α − 1 3 L − 1 α 4 , τ min o τ s ( x k ) . = τ ′ s ( x k ) − ∆ max and if we c hoose t k +1 = t k + τ s ( x k ) , then ˙ V ( t ) ≤ − (1 − ϑ ) α 3 ( k x k ) for all t ∈ [ t k + ∆ k , t k +1 + ∆ k +1 ] and for all k > 0 . This ensures the asymptotic stability of the origin. As discussed abov e, τ s ( x k ) i s stri ctly positive for each x k ∈ Ω V ( x k ) , and thus τ min and ∆ max are strictl y positiv e as well. This com pletes the proof. Remark 1: The choice of ϑ 1 ∈ (0 , 1) establishes an intuitive tradeof f between allo wance of larger inter–sampling times τ s ( x k ) and robustness to larger actuation delays ∆ max . As ϑ 1 decreases, τ s ( x k ) decreases and ∆ max increases. This implies that we im- prov e rob ustness vs actuation d elays, paid by stronger sampling requirements. On the contrary , as ϑ 1 increases, τ s ( x k ) i ncreases and ∆ max decreases. This implies that we achie ve less restrictiv e sampling requirements, paid by loss of robustness to the actuation delays. Remark 2: When applying the self triggering rule defined in the abov e Theorem in a real scenario, i t is necessary t o solve the on- line computation of the next sampling time for each time instant t k . This compu tation corresponds to solving a second de gree equality , and is thus acceptable i n an embedded system. On the contrary , the computation of M 1 ( x k ) and M 2 ( x k ) can be performed off- line. Howe ver , i t might be difficult to compute in a closed form M 2 ( x k ) = max ¯ x ∈ Ω V ( x k ) k ϕ 2 ( ¯ x, x k ) k as a function of x k . In this case, we can define M 2 . = max ¯ x,x k ∈ Ω V ( x k ) k ϕ 2 ( ¯ x, x k ) k and use it in Equation 11 to compute the next sampling time. The abov e Remarks also apply to Theorems 2 and 3 i n following Sections. I V . S E L F T R I G G E R E D S A F E T Y C O N T R O L The main limitation of the r esults develo ped in Section III i s the Lipschitz continuity assumption of α − 1 3 ( · ) and α 4 ( · ) . The follo wing examp le shows that ev en exp onentially stabilizable systems do not alway s satisf y this assumption. Example 1: Co nsider the system ˙ x = Ax + B u + f ( x, u ) = f 0 ( x, u ) with f 0 ( x, u ) = − x 1 + x 2 + x 2 1 (1 + x 1 ) u . Let u = κ ( x ) = − x 2 ∈ U . Consider the L yapunov candidate V ( x ) = x T P x , with P solution of the L yapuno v equation P A c + A T c P = − Q , with Q = 2 I and A c = − 1 1 0 − 1 . Since P = 2 1 1 3 , then λ P min ∼ = 1 . 382 and λ P max ∼ = 3 . 618 denote respectiv ely the minimum and the maximum eigen value of P . For k x k ≤ 2 / 3 , the time deri vati ve of V satisfies ˙ V = − k x k 2 Q + 2 | x 1 | 3 + 3 | x 1 | x 2 2 ≤ − 2 x 2 1 − 2 x 2 2 + 2(2 / 3) x 2 1 + 3(2 / 3) x 2 2 ≤ − 1 2 k x k 2 thus the origin is l ocally exponentially stable, with α 1 ( k x k ) = λ P min k x k 2 , α 2 ( k x k ) = λ P max k x k 2 , α 3 ( k x k ) = k x k 2 / 2 , and α 4 ( k x k ) = λ P max k x k . It i s clear that A ssumption 1 is not satisfied, since α − 1 3 ( · ) is not Lipschitz. For this reason, we can not imply the existen ce of a stabilizing self triggering strategy . ⋄ The main problem is that, if α − 1 3 ( · ) is not Lipschitz, the next sampling time τ s ( x k ) goes to zero as x k approaches the eq uilibrium point, and this might generate Zeno behaviors. In this Section, without the Li pschitz assumption on α − 1 3 ( · ) ∈ K , we wil l show that 1. For the unperturbed system (2), it is possible to keep t he state arbitrarily close to the equilibrium point by applying a self triggering strategy; 2. For the perturbed system (1), i t is possible to keep the state in a δ boundary of the equilibrium point if the disturbance norm is upper bounde d by a class K function ν ( δ ) . The results dev eloped in this section are based on the f ollo wing. Assumption 2: Assume that f 0 ∈ C ℓ ( D x × D u ) , with ℓ a positiv e integer sufficiently larg e. Assume that there exists a nonempty set U of state feedback laws κ : D x → D u , such that κ ∈ C ℓ ( D x ) and the origin of the system (4) is asymptotically stable. ⋄ A. Unperturbed Systems The following theorem states that, if a system is asymptotically stabilizable using a continuous time state feedback control law , then it i s always possible to keep the state arbitrarily close to the equilibrium point by applying a digital self triggering strategy . Note that, in order to guarantee that the state is arbitrarily close to the equilibrium point, we need the stabilizability assumption. Theor em 2: Giv en the nominal system (2) and a safe set B δ , δ > 0 , under Assumption 2 there exist a state feedback control law κ , a minimum sampling time τ min > 0 , a function τ s : D x → [ τ min , ∞ ) and a maximum allowed actuation delay ∆ max > 0 , such that if I is inductiv ely defined by t k +1 = t k + τ s ( x ( t k )) , if ∆ k ∈ [0 , ∆ max ) for each k ≥ 0 , and if the system is safe before applyin g the state feedback control law x ( t ) ∈ B δ , ∀ t ∈ [ t 0 , t 0 + ∆ 0 ] , then the closed loop system (4) with control i nput signal u I ( t ) is safe with respect to B δ , for the time interv al [ t 0 , ∞ ) . Pr oof: Using the same reasoning of Theorem 1, and directly considering the case ∆ k > 0 , we conclude that the following inequality ˙ V ≤ − (1 − ϑ ) α 3 ( k x k ) + α 4 ( k x k )( k d h k + k d ∆ k ) − ϑα 3 ( k x k ) ≤ − (1 − ϑ ) α 3 ( k x k ) holds when α 4 ( k x k ) M 1 ( x k )( t − t k )+ M 2 ( x k )( t − t k ) 2 + M 3 ∆ k ≤ ϑα 3 ( k x k ) with ϑ ∈ (0 , 1) , and d h , d ∆ , M 1 ( x k ) , M 2 ( x k ) , M 3 defined as in Theorem 1. The abo ve inequality holds if k x k ≥ α − 1 3 α 4 ( δ ) ϑ M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 + M 3 ∆ k . = η . This i mplies, by [6], that t here exists b := α − 1 1 ( α 2 ( η )) > 0 such that k x ( τ ) k ≤ b , ∀ τ ∈ [ t k , t ] if x ( t k ) ∈ B b and if t he following holds α 4 ( δ ) M 1 ( x 0 )( t − t k ) + M 2 ( x k )( t − t k ) 2 + M 3 ∆ k ≤ ϑα 3 α − 1 2 α 1 ( δ ) , (16) where we imposed the constraint b = δ . Let ϑ = ϑ 1 + ϑ 2 , wit h ϑ 1 , ϑ 2 ∈ (0 , 1) and ϑ 1 + ϑ 2 < 1 . Equation (16) holds if the follo wing inequalities hold α 4 ( δ ) M 1 ( x 0 )( t − t k ) + M 2 ( x k )( t − t k ) 2 ≤ ϑ 1 α 3 α − 1 2 α 1 ( δ ) , (17) α 4 ( δ ) M 3 ∆ k ≤ ϑ 2 α 3 α − 1 2 α 1 ( δ ) . (18) If we define τ ′ s ( x k ) . = max t − t k | equation (17) is satisfied for each t − t k ∈ [0 , τ ′ s ( x k )] τ min . = min x k ∈B δ τ ′ s ( x k ) ∆ max . = min (1 − ϑ 1 ) α 3 α − 1 2 α 1 ( δ ) α 4 ( δ ) M 3 , τ min τ s ( x k ) . = τ ′ s ( x k ) − ∆ max and we choose t k +1 = t k + τ s ( x k ) , then (17) holds for all t ∈ [ t k + ∆ k , t k +1 + ∆ k +1 ] and for all k ≥ 0 . Since M 1 ( x k ) , M 2 ( x k ) and M 3 are non-neg ative and upper bounded for each x k ∈ B δ , and since α 4 ( · ) and α 3 α − 1 2 α 1 ( · ) are K class functions, then Equation (17) is a second degree inequality in the form ay 2 + by − c ≤ 0 , where a, b are non-neg ative and bounde d and c is strictly positi ve and bounded. This trivially implies that τ s ( x k ) i s stri ctly positi ve for each x k ∈ B δ , and thus τ min is strictly positi ve as well. It is also clear that ∆ max is strictly positiv e. This completes the proof. B. P erturbed Systems A generic system (1), subject to disturbanc es and parameter v ariations, can be seen as the nominal system (2), perturbed by the term g ( x, u, µ, d ) = f ( x, u, µ, d ) − f 0 ( x, u ) . = d g . (19) Hence, (1) can be re written as follo ws ˙ x = f 0 ( x, u ) + g ( x, u, µ, d ) . (20) Definition 2: Under Assumption 2, and giv en the perturbed sys- tem (1 ) and a safe set B δ , δ > 0 , we define the perturbation (19) δ –admissible if there exists a state feedback control law κ ∈ U and a constant ϑ g ∈ (0 , 1) such that the function g ( x, κ ( x 0 ) , µ, d ) satisfies max x,x k ∈B δ d ∈D d µ ∈D µ k g ( x, κ ( x k ) , µ, d ) k ≤ ϑ g α 3 α − 1 2 α 1 ( δ ) α 4 ( δ ) . = ν ( δ ) (21) with α 1 , α 2 , α 3 , α 4 as in (5). ⋄ The δ –admissible perturbations are those for which t he safety problem with respect to a ball B δ can be solv ed using continu- ous t ime measu rement and actuation. If a perturbation i s not δ – admissible, safety with respect to B δ is clearly not achiev able using sampled measurements and actuations. Note that in condition (2) the exp ression of ν ( δ ) can be explicitly computed. The following theorem states that, if a system is asymptotically stabilizable using a con tinuous time state feedback control law and the perturbation is δ –admissible, then it is possible to keep t he state in a boundary B δ of the equilibrium point by applying a digital self triggering strategy . Theor em 3: Giv en the perturbed system (1 ) and a safe set B δ , δ > 0 , under Assumption 2 and for any δ –admissible perturba- tion (19), there exist a state feedba ck control law κ , a minimum sampling time τ min > 0 , a function τ s : D x → [ τ min , ∞ ) and a maximum allo wed actuation delay ∆ max > 0 , such that if I is inducti vely defined by t k +1 = t k + τ s ( x ( t k )) , if ∆ k ∈ [0 , ∆ max ) for each k ≥ 0 , and if the system is safe before applyin g the state feedback control law x ( t ) ∈ B δ , ∀ t ∈ [ t 0 , t 0 + ∆ 0 ] then the closed loop system (3) with control i nput signal u I ( t ) is safe with respect to B δ , for the time interv al [ t 0 + ∆ 0 , ∞ ) . ⋄ Pr oof: Using t he same reasoning of T heorem 2 , we conclude t hat the follo wing inequality ˙ V ≤ − (1 − ϑ ) α 3 ( k x k ) − ϑα 3 ( k x k ) + α 4 ( k x k )( k d h k + k d ∆ k + k d g k ) ≤ − (1 − ϑ ) α 3 ( k x k ) holds when α 4 ( k x k ) M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 + M 3 ∆ k + k d g k ≤ ϑα 3 ( k x k ) with ϑ ∈ (0 , 1) , and d h , d ∆ , M 1 ( x k ) , M 2 ( x k ) , M 3 defined as in Theorem 1. The abo ve inequality holds is k x k ≥ α − 1 3 α 4 ( δ ) ϑ M 1 ( x k )( t − t k ) + M 2 ( x k )( t − t k ) 2 + M 3 ∆ k + k d g k . = η . This i mplies, by [6], that t here exists b := α − 1 1 ( α 2 ( η )) > 0 such that k x ( τ ) k ≤ b , ∀ τ ∈ [ t k , t ] if x ( t k ) ∈ B b and if t he following holds α 4 ( δ ) M 1 ( x 0 )( t − t k ) + M 2 ( x k )( t − t k ) 2 + M 3 ∆ k + k d g k ≤ ϑα 3 α − 1 2 α 1 ( δ ) . (22) where we i mposed the constraint b = δ . Let ϑ = ϑ 1 + ϑ 2 + ϑ g , with ϑ 1 , ϑ 2 , ϑ g ∈ (0 , 1) and ϑ 1 + ϑ 2 < 1 − ϑ g . Since t he perturbation is assumed δ –admissible, then k d g k ≤ ϑ g α 3 α − 1 2 α 1 ( δ ) α 4 ( δ ) . Thus, Equation (22) holds if the follo wing inequalities hold α 4 ( δ ) M 1 ( x 0 )( t − t k ) + M 2 ( x k )( t − t k ) 2 ≤ ϑ 1 α 3 α − 1 2 α 1 ( δ ) α 4 ( δ ) M 3 ∆ k ≤ ϑ 2 α 3 α − 1 2 α 1 ( δ ) . (23) If we define τ ′ s ( x k ) . = max t − t k | equation (23) is satisfied for each t − t k ∈ [0 , τ ′ s ( x k )] τ min . = min x k ∈B δ τ ′ s ( x k ) ∆ max . = min (1 − ϑ 1 − ϑ g ) α 3 α − 1 2 α 1 ( δ ) α 4 ( δ ) M 3 , τ min τ s ( x k ) . = τ ′ s ( x k ) − ∆ max and we choose t k +1 = t k + τ s ( x k ) , then (22) holds for all t ∈ [ t k + ∆ k , t k +1 + ∆ k +1 ] and for all k ≥ 0 . As discussed in Theorem 1, τ s ( x k ) is strictly positiv e for each x k ∈ B δ , and τ min , ∆ max are strictly positiv e as well. This completes the proof. As discussed in Section III , t he ch oice of ϑ 1 , ϑ 2 and ϑ g establishes in an intuiti ve way the tradeof f between allowa nce of larger inter–sampling times ( ϑ 1 ), and robus tness to larger actuation delays ( ϑ 2 ) and perturbations ( ϑ g ). Theorems 2 and 3 prove the existence of a self triggering str ategy characterized b y the time sequence I = { t k } k ≥ 0 , with t k ≥ τ min > 0 for each k ≥ 0 , such that t he closed loop system satisfies a giv en safety specification. Moreo ver , they provide a formula to exp licitly compute the nex t sampling time t k +1 as a function of the state x ( t k ) at time t k . Although the simulation r esults illustrated i n Secti on V show strong benefits of t he proposed self triggering strategy with respect to controllers based on constant sampling, the sequence I might be conserv ativ e, in the sense that longer sampling times m ight be determined, because of the app roximations used in the proof. A trivial way to obtain a less conservati ve sequence I without introducing more restricting assump tions is t he use of T aylor expan sions of order higher than 2. V . A N E X A M P L E O F A P P L I C A T I O N O F T H E D I G I TA L S E L F T R I G G E R E D R O B U S T C O N T R O L Consider the system defined in Example 1. As already shown, we can not imply t he existence of a stabilizing self triggering strategy . Ho wev er, since Assumption 2 holds, Theorem 2 implies the existence of a self triggering strategy that guarantees safety for an arbitrary small neighborhoo d of the equilibrium point. In particular , since the origin of t he system is locally exponentially stabilizable for k x k ≤ 2 / 3 , we define the safe set B δ with δ = 10 − 4 < 2 / 3 . W e performed simulations using Matlab, with init ial condition x 0 = (10 − 5 , 10 − 5 ) T ∈ B δ . 0 2 4 6 8 10 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 x 10 −5 Fig. 1. Conti nuous control: x 1 (solid), x 2 (dashed) vs time In Figure 1, the closed loop behav ior is illustrated when a continuous time control law is used. The closed loop system is asymptotically stable. 0 20 40 60 80 100 −2 0 2 x 10 −4 (a) 0 20 40 60 80 100 −1 −0.5 0 0.5 1 x 10 −3 (b) Fig. 2. Digital control w ith constant sampling time of 2.1 s: (a) x 1 ; (b) x 2 vs time In Figure 2, the closed loop beha vior is illustrated when a discrete time control law with con stant sampling time of 2.1 s is used. The closed loop system is unstable. In F igure 3, the closed loop behav ior is illustrated when the proposed self triggering control algorithm is used, with ϑ = 0 . 99 and wit h no actuation delay , namely ∆ k = 0 for each k ≥ 0 . 0 20 40 60 80 100 −1 −0.5 0 0.5 1 x 10 −5 (a) 0 20 40 60 80 100 −1 −0.5 0 0.5 1 x 10 −5 (b) Fig. 3. Self trigge ring control with ϑ = 0 . 99 and ∆ k = 0 ms: (a) x 1 ; (b) x 2 vs time 0 20 40 60 80 100 0 2 4 6 8 10 12 Fig. 4. Seq uence of sampling insta nts I = { t k } k ≥ 0 [s] wit h ϑ = 0 . 99 and ∆ k = 0 ms . The closed loop system is not asymptotically stable, but is safe with respect to B δ for the time interval [ t 0 , ∞ ) . It is interesting to remark that the ave rage sampling time is 6.2 s, i.e. more than 295% longer than the constant sampling ti me of 2.1 s that yields an unstable control loop. Thus, using the proposed self triggering control algorithm, we achie ve safety reducing of more than 295% the battery energy consumption, with respect to an unstable control strategy with constant sampling. Ho wev er , since we have chosen ϑ = 0 . 99 , we can only guarantee robustness with resp ect to actuation delays bounde d by ∆ max = 0 . 17 ms. In F igure 5, the closed loop behav ior is illustrated when the proposed self triggering control al gorithm law is used, with ϑ = 0 . 5 and wi th actuation delay ∆ k = ∆ max = 9 ms for each k ≥ 0 . The closed loop system is not asymptotically stable, but is st ill safe with respect to B δ for the time interval [ t 0 , ∞ ) . Ho wev er, since we have chose n ϑ = 0 . 5 in order to be robust with r espect t o actuation delays, the average sampling time 3 s is more conserv ative with respect to the case ϑ = 0 . 99 . Ho wev er , the ave rage sampling time is almost 50% longer than the constant 0 20 40 60 80 100 −1 −0.5 0 0.5 1 x 10 −5 (a) 0 20 40 60 80 100 −1 −0.5 0 0.5 1 x 10 −5 (b) Fig. 5. Se lf trigge ring control with ϑ = 0 . 5 and ∆ k = 9 m s: (a) x 1 ; (b) x 2 vs time 0 20 40 60 80 100 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Fig. 6. Sequence of sampling instan ts I = { t k } k ≥ 0 [s] with ϑ = 0 . 5 and ∆ k = 9 ms sampling time of 2.1 s, that yields an unstable control loop. Thus, using the propo sed self triggering control algorithm, we achie ve safety reducin g of almost 50% the battery ener gy consumption, with respect to an uns table control strategy with co nstant sampling, while guaranteeing robu stness with respect t o actuation delays bounded by ∆ max = 9 ms. V I . C O N C L U S I O N S W e hav e dev eloped nov el results on self triggering control for the asymptotic stabili ty of unperturbed nonlinear systems, affected by bounded actuation delays, and for the safety problem, for nonlinear systems perturbed by norm–b ounded parameter uncertainties and disturbances, and affected by bounde d actuation delays. W e hav e provid ed a methodology for t he computation of the ne xt exe cution time in both cases. W e have sho wed on a simple case study that the proposed results provide strong benefits in terms of energy consumption, with respect to digital controls based on constant samplings, by reducing the a verage sampling times. As a next step of this research line, we aim to tackle more complex case studies, and obtain results for less conserv ativ e sampling time sequence s. R E F E R E N C E S [1] I. F . Akyildi z and I. H. Kasimoglu, Wi relessHAR T: Wir eless sensor and actor networks: research challe nges, Ad hoc networks , V OL. 2, NO. 4, pp. 351–367, 2004. [2] A. Anta, and P . T abuada, Sel f–Trigge red Stabiliza tion of Homogeneous Control Systems, Proceedi ngs of the 2008 American Control Confer- ence – A CC 2008 , pp. 4129–4134, 2008. [3] A. Anta, and P . T abuada, T o Sample or not to Sample: Self–T riggered Control for Nonlinear Systems, IEEE T ransacti ons on Automati c Con- trol , V ol. 55, No. 9, 2010. [4] APOLLO Final Rep ort, Intelligen t T yre for Acci dent–Free Traf fic, IST - 2001–34372 , Deli verable 22/2 3, 2001. [5] D. Bianchi , A. Borri, G. Bur gio, M. D. Di Benedetto, and S. Di Gennaro, Adaptiv e Int egrate d V ehicle Control using Acti ve Front Steerin g and Rear T orque V ectoring, Interna tional Journal of V ehicle Autonomous Systems , Special Issue on: “ Autonomous and Semi– Autonomous Control for Safe Dri ving of Ground V ehicles” , V ol. 8, No. 2/3/4, pp. 85–105, 2010. [6] H. K. Khalil, Nonlinea r Systems , Third Edition, Prentice Hall, Upper Saddle Ri ver , New Jersey , U.S.A., 2002. [7] H. Karl and A. Will ig, Protocol s and Architec tures for W ireless Sensor Netwo rks , Wile y , 2005. [8] J. Kurzweil, On the Inv ersion of Liapunov’ s Second T heorem on Stabili ty of Motion, Tra nslation of American Mathematica l Societ y , V ol. 24, pp. 19–77, 1963. Originally appeared on Czecho slov ak Mathemat ica Journal , V ol . 81, pp. 217–259, 1956. [9] M. Lemmon, T . Chantem, X. Hu, and M. Zyskowski , On Self– Tri ggered Full Information H–infinity Controllers, in Hybrid Hybrid Systems: Computatio n and Control , 2007. [10] X. W ang, and M. Lemmon, Self–Trigge red Feedbac k Control Sys- tems Wi th Finit e–Gain L 2 Stabili ty , IEEE Transa ctions on Automatic Control , No. 3, V o l. 54, pp. 452-467, 2009. [11] R. Matsuza kia, A. T odoroki, W ireless Strain Monitoring of Tire s Using Electric al Capacitanc e Cha nges with an Oscillati ng Cir cuit, Sensors and Actuators A , No. 119, pp. 323–3 31, 2005. [12] M. Mazo, and P . T abuada, On Event–T riggered and Self–Trig gered Control o ver Se nsor/Actuator Networks, Proceedi ngs of the 47 th Conferen ce on Decision and Control , Cancun, Mexic o, pp. 435–440, 2008. [13] H. B. P acejka, T yre and V ehic le Dynamics, Elsevie r Butterw orth–Hein, 2005. [14] M. E. Pal mer, C. C. Boyd, J. McMa nus, and S. Mell er , W ireless Smart–T ire for Road Friction Measurement and Self State Determi- nation, Proceedi ngs of the 43 r d AIAA/ASME/ASCE/AHS Structure , Structura l Dynamics, and Materia ls Conferenc e , p. 1548, Den ver , CO, USA, 22-25 April, 2002. [15] J. Song, S. Han, A. Mok, D. Chen, M. Luca s, M. Nixon, and W . Pratt, Wire lessHAR T: Applying Wi reless T echnol ogy in Real- Time Industrial Process Control, In Proceedi ngs of the 14 th IEEE Real-T ime and Embedded T echnology and Applicat ions Symposium (R T AS) , 2008. [16] P . T abuada, Ev ent-T riggered Real-T ime Sched uling of Stab ilizing Control T asks, IEEE Transa ctions on Automatic Control , V ol . 52, No. 9, pp. 1680–1685, 2007. [17] A. Anta and P . T abuada, Exploiting Isochrony in Self-T riggered Con- trol, Submitted for publicatio n, Preprint av ailab le on arXi v:1009.5208 , September 2010. [18] Brook T aylor , Methodus Incrementor um Directa et Inv ersa [Direct and Re verse Methods of Incre mentation] (London, 1715), pp. 21–23 (Propositio n VII, Theorem 3, Corollary 2). Tran slated into English in D. J. Struik, A Source Book in Mathematics 1200–1800 (Cambridge, Massachuset ts: Harv ard Uni versity Press, 1969), pp. 329–33 2. [19] M. V elasco, P . Marti, and J. Fuertes, The Self T riggered T ask Model for Rea l–Time Control Syst ems, W ork–in–Progress Session of the 24 th IEEE Real –Time Systems Symposium – R TSS03 , pp. –, 2003. [20] T . Y oshiza wa, On the Stabilit y of Solutions of a System of Differe ntial Equations , Memoirs of the Colle ge of Sciences, Univ ersity of Kyo to, Ser . A, V ol. 29, pp. 27–33, 1955.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment