비선형 시스템에서 근사 PCRLB 차이와 성능 분석
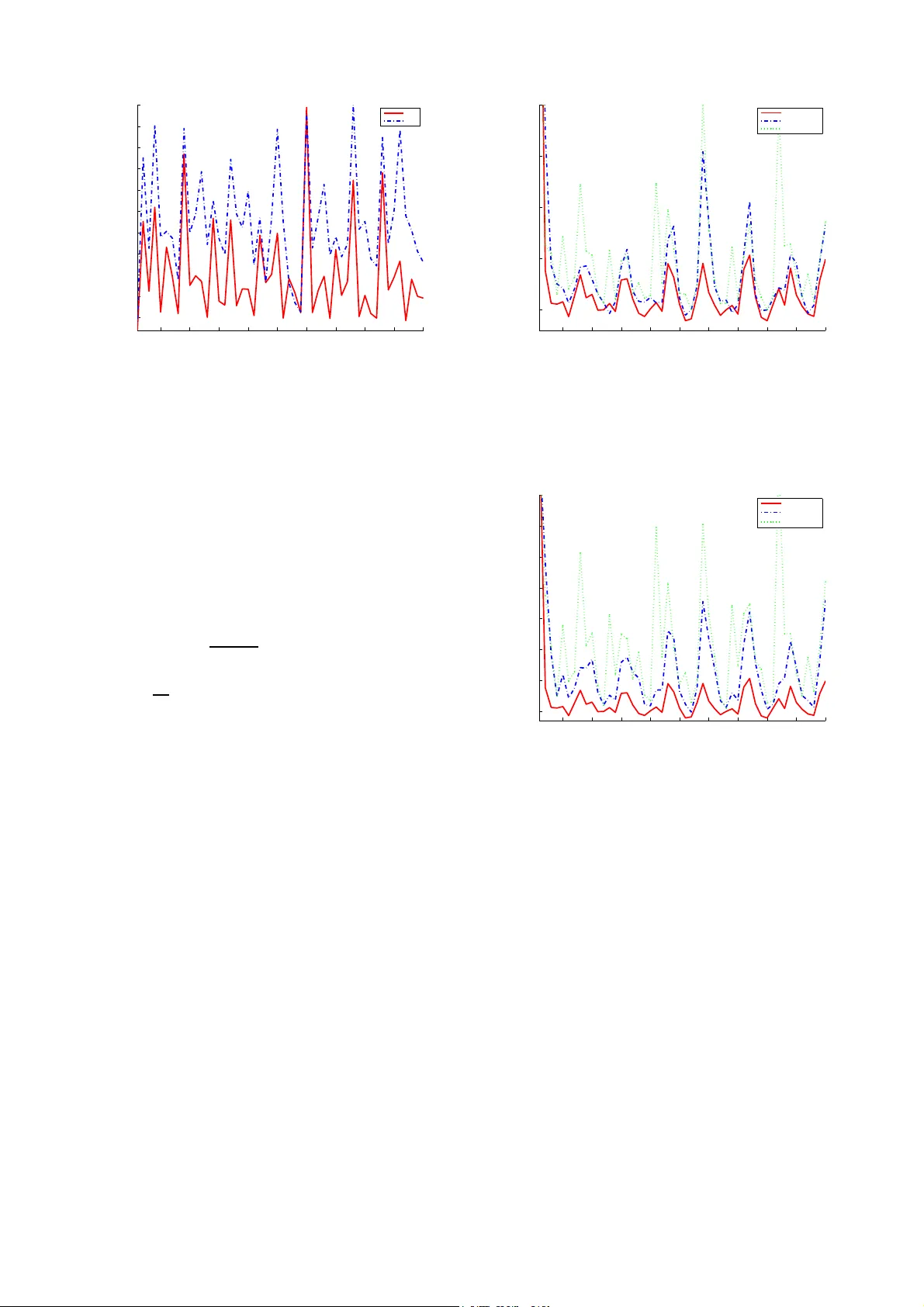
본 논문은 비선형 동적 시스템의 후방 크래머-라오 하한(PCRLB)을 재귀적으로 근사하는 두 가지 방법을 제시한다. 하나는 상태 추정 평균만을 이용한 정확 모델 기반 접근이고, 다른 하나는 평균과 공분산을 모두 활용한 테일러 전개 기반 접근이다. 파티클 필터(PF)와 무향 칼만 필터(UKF)로 실험을 수행한 결과, 평균·공분산 기반 근사가 평균만 이용한 방법보다 더 정확한 PCRLB를 제공함을 확인하였다. 또한 두 근사 사이의 차이를 이론적으로…
저자: *저자 정보가 논문 본문에 명시되어 있지 않아 제공할 수 없습니다.*
이 논문은 비선형 이산시간 동적 시스템에서 후방 크래머‑라오 하한(PCRLB)을 실시간으로 추정하기 위한 두 가지 Gaussian 근사 방법을 제시하고, 그 차이를 이론적으로 분석한다.
먼저 시스템 모델을 xₖ₊₁ = fₖ(xₖ)+wₖ, zₖ = hₖ(xₖ)+vₖ 로 정의하고, 과정·관측 잡음은 각각 평균 0, 공분산 Qₖ와 Rₖ를 갖는 Gaussian이라고 가정한다. 후방 피셔 정보 행렬(FIM) Jₖ는 기존 연구에서 재귀식 Jₖ₊₁ = D₂₂ₖ − D₂₁ₖ(Jₖ+D₁₁ₖ)⁻¹D₁₂ₖ 으로 도출되었으며, 여기서 D₁₁ₖ, D₁₂ₖ, D₂₂ₖ는 상태 전이와 관측 확률밀도에 대한 1차·2차 미분을 포함한다. 하지만 이 미분은 실제 상태 xₖ에 대해 평가해야 하므로, 온라인에서 직접 계산할 수 없다.
이에 저자는 두 가지 근사 전략을 제안한다.
1) **평균 기반 정확 모델**: 현재 추정 평균 \hat{x}_k 을 그대로 xₖ에 대입하고, fₖ와 hₖ를 직접 평가한다. 이 경우 D 행렬은 \hat{x}_k만을 이용해 계산되며, 계산량이 적지만 실제 상태와의 차이가 크게 반영되지 않는다.
2) **평균·공분산 기반 테일러 전개 모델**: \hat{x}_k와 추정 공분산 P_k를 이용해 fₖ와 hₖ를 2차 테일러 전개한다. 이를 통해 평균 \bar{x}_{k+1}=E
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기