Error Analysis of Approximated PCRLBs for Nonlinear Dynamics
In practical nonlinear filtering, the assessment of achievable filtering performance is important. In this paper, we focus on the problem of efficiently approximate the posterior Cramer-Rao lower bound (CRLB) in a recursive manner. By using Gaussian …
Authors: *저자 정보가 논문 본문에 명시되어 있지 않아 제공할 수 없습니다.*
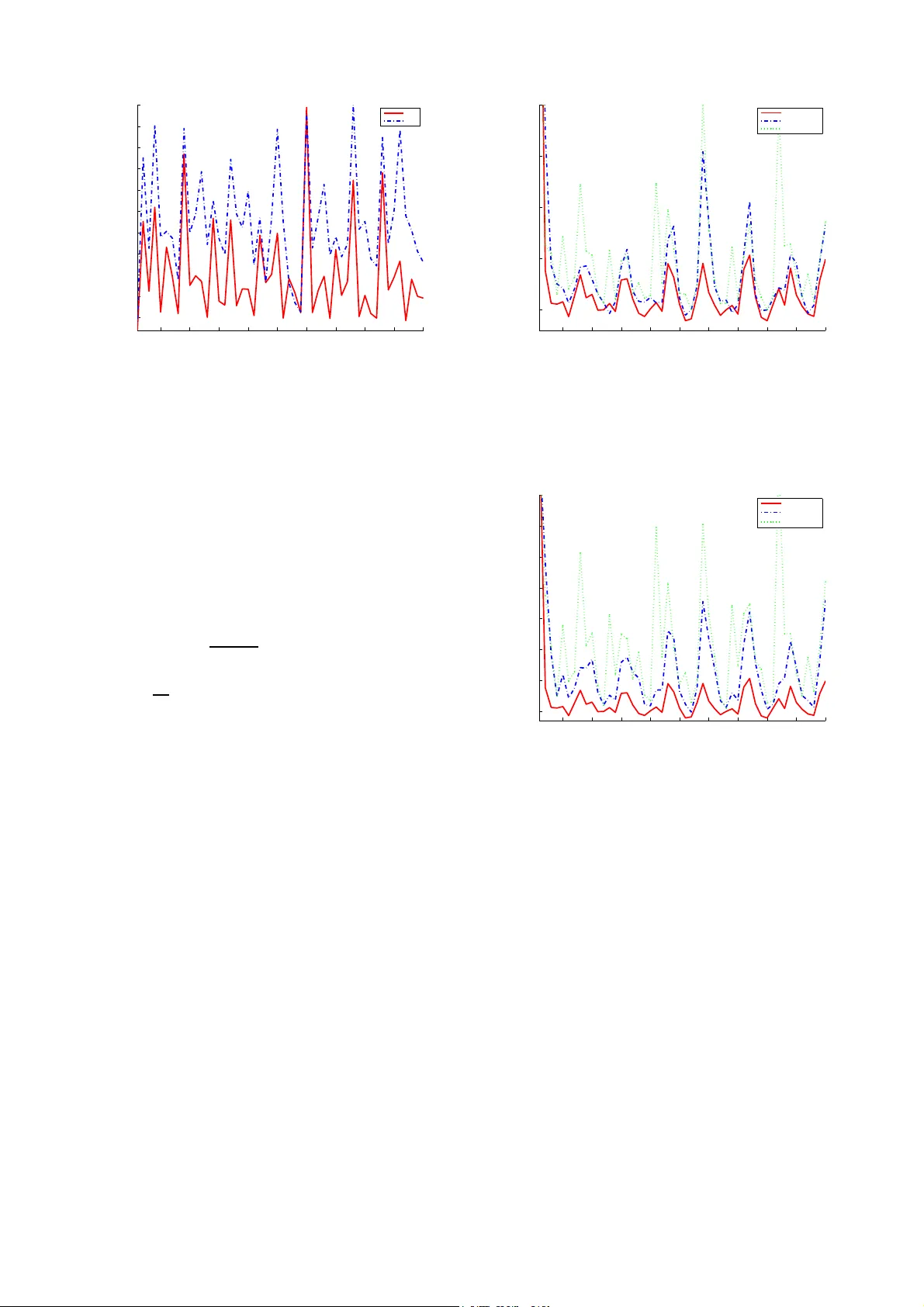
Error Analysis of A ppro ximated PCRLBs f or Nonlinear Dynamics Ming Lei, Pierre Del Moral and Christophe Baehr Abstract — In practical nonlinear filtering, the assessment of achiev able filtering perfo rmance is important. In this paper , we fo cus on the problem of e ffi ciently approximate the posterior Cramer -Rao lower bound (CRLB) in a recursive manner . By using Gaussian assumptions, two types of approximations for calculating th e CRLB ar e proposed: An exact model u sing the state estimate as well as a T ay lor-series-e xpand ed model using both of the state estimate and its err or cov ariance, are derived. Moreo ver , the di ff erence between the two approximated CRLBs is also f ormulated analytically . By employing the particle filter (PF) and the unscented Kalman filter (UKF) to compute, simu- lation results rev eal th at the approximated CRLB usin g mean- cov ariance-based model outperforms that using th e mean-based exact model. It is also sh own that the theoretical di ff erence between th e estimated CRLBs can be improve d th rough an impro ved filtering method. Index T erms — Posterior Cramer -Rao lower bound ( CRLB), approximated CRLB, Fi sher in fo rmation matrix (FIM), non - linear dynamical system, T aylor series expansion. I. I ntr oduction It is well kn own th at optimal estimators fo r the no nlinear filtering of the d iscrete-time dynam ic systems is an activ e area of research and that a large number of subo ptimal approx imated appro aches were d ev elop ed [1]. It is impor- tant to quantif y the a ccuracy o f e stimates obtained fo r th e design of a lgorithms such as the interacting mu ltiple models (IMM) where weighted estimates fro m multiple estimator s are simultaneou sly employed. During the past thirty years many attempts hav e been made to theor etically deriv e the achiev able p erform ance of nonlinear filters. Deriving perfo rmance bou nds are importan t since su ch bou nd serve as ind icators to m easure system perfor mance, and c an b e used to d etermine wh ether imp osed perfor mance requirements are realistic or no t. For d ynamical statistical m odels, a co mmonly used b ound is the CRLB that has been inv estigated by various re- searchers: V an T rees [2] presented the batch form of a posterior CRLB for r andom parameter vectors and a pre- 1989 re view [3] summarized several lower boun ds for nonlin- ear filtering, which h eavily emphasized the continu ous time case. Bob rovsky [4] applied CRLB to discrete time pr oblems Dr . Ming Lei is wit h the INRIA BOR DEAUX SUD-OUEST , Univ er- sity of Bordeaux-I in Bordeaux and CNRM / GAME URA1357, French Nationa l Centre for Meteoro logical Research in T oulouse , France. ( min- glei.sa@gmail.com) Prof. Pierre Del Moral is with the INRIA BORDEA UX SUD-OUEST and Mathemati cs Institute, Univ ersity of Bordeaux-I, Bordeau x, France. ( pierre.del moral@inria.fr) Prof. Christoph e Baehr is with the CNRM / GAME URA1357, French Nationa l Centre for Meteorologica l Research, and the T oulouse Math- ematics Institut e, Statist ic and Probability team, T oulou se, France. ( christophe.baeh r@math.univ-toulouse .fr ) and Galdos [ 6] generalized it to the multi-dimen sional case. The m ain sho rtcoming o f these for mulations is the b atch form of implementation resulting high computation al loads. T ichavsky [7 ] was the first to derive a re cursive CRLB for updating the posterior Fisher inform ation m atrix (FIM) from one time in stance to the next while keeping the FIM con stant in size. Subsequen tly , CRLB theo ry was extend ed to many ap- plications, e. g., intr oducing th e CRLB to multiple target tracking [9], incorporating data association fo r trackin g with the CRLB [10], target detection for the case having a detection proba bility less than unit [8], etc. It is well kn own that th e matrices in recursive form of FIM, can only be th eoretically determined b y the true value of state. Unfortun ately , we ca nnot ob tain the tru e state on line in p ractice, excep t in some well-de signed experim ents where true value of the state is given a s a p rior knowledge. There- fore we naturally focus on how to determine an ap proxima te CRLB by u sing on line state e stimates (as op posed to the tr ue state values). W e have main ly two ways to approx imate the CRLB [5]: 1) Make full use of the first-two order moments of th e state estimate, i.e., expectation and covariance, by inc orpora ting them with the T aylor series expansion of the dynamic s. 2) Combine the expectation of th e state with the exact dynamic model directly . The first meth od u se both estimates and is rather comp lex while the second method is considerably simple, but d epends heavily on an exact model. The second method is mostly p referred in practice f or its simplen ess an d is su ffi cient to o btain an usable app roximated CRLB. The following qu estion ther efore nee ds to be addressed: By how much the CRLB em ployed the two kinds o f appr oxi- mations di ff er from, a nd wh ich o ne is a better ap proxim ation to the true CRLB. This is the main mo tiv ation of this in vestigation. In add ition, determinin g the accuracy of the estimated CRLB by u sing a state estimate, rather th an the true state under a recursive framework for a gen eral nonlinear dynamics, has no t been addre ssed pre vio usly . In this paper, w e show h ow the state estimates can be ap- plied to determine the di ff erence between th e two estimated CRLBs. By u sing Monte Carlo simulation s, we show that the propo sed metho d achiev e a satisfactory approximation , and the accuracy of estimated CR LB can be explicitly improved by increasing the accuracy o f filtering. II. P r oblem F ormula tion A. Nonlinear Dynamica l Model Consider the following discrete-time nonlinear dynamics with add iti ve Gaussian noise: x k + 1 = f k ( x k ) + w k , (1) z k = h k ( x k ) + v k , (2) where the non linear vector-v alued functio ns f k ∈ R n × 1 and h k ∈ R m × 1 be used to mod el the state kinematics and me a- surement respec ti vely , and gene rally n > m . x k ∈ R n × 1 is the state vector , z k ∈ R m × 1 is the measu rement vector, w k ∈ R n × 1 is a ze ro-mean white Gau ssian process noise with known covariance Q k , and v k ∈ R m × 1 a zero -mean Gaussian white measuremen t noise with variance R k . The initial state x 0 is assumed as a Gau ssian distribution with mean ¯ x 0 and variance P 0 . Moreover , a gen eral accepted assumption like cov ( x 0 , v k ) = 0 , co v ( x 0 , w k ) = 0. B. P osterior CRLB Let ˆ x k and C k denote the u nbiased state estimate and its erro r covariance at time instant k . W e therefore have C k = E h ˜ x k ˜ x ′ k i ≥ J − 1 k , (3) where ˜ x k = x k − ˆ x k is the p rediction erro r of state. J − 1 k is the posterior CRLB (PCRLB), defined to be th e in verse of FIM, J k . The super script ( · ) ′ in (3) d enotes th e tran spose of a vector or a matrix , and the ine quality in ( 3) m eans that the di ff erence C k − J − 1 k is a positi ve semidefin ite matrix. From [7], [11] we k now that the sequential FIM J k can be recursively calcu lated by J k + 1 = D 22 k − D 21 k ( J k + D 11 k ) − 1 D 12 k ( k > 0) , (4) J 0 = E h − ∆ x 0 x 0 log p ( x 0 ) i , (5) D 11 k = E h − ∆ x k x k log p ( x k + 1 | x k ) i , (6) D 12 k = D 21 k ′ = E h − ∆ x k + 1 x k log p ( x k + 1 | x k ) i , (7) D 22 k = E h − ∆ x k + 1 x k + 1 log p ( x k + 1 | x k ) i + E h − ∆ x k + 1 x k + 1 log p ( z k + 1 | x k + 1 ) i , (8) here let ∇ and ∆ be operators of th e first and secon d-ord er partial derivati ves, i.e., ∇ x = h ∂ ∂ x 1 , · · · , ∂ ∂ x n i ′ , ∆ y x = ∇ x ( ∇ y ) ′ . Note th at all the above expectatio ns are taken with respect to the joint probability den sity function (PDF) p ( x 0: k + 1 | z 1: k + 1 ), where x 0: k + 1 and z 1: k + 1 denote all the states an d measure- ments up to tim e k + 1. III. A ppro xima ted G a ussian F orm (AGF ) of N onlinear D yn amics According to CRLB th eory , th e derivati ves in ( 4) should be ev aluated at the true value of state x k . Our final aim is to use the mom ents of state estima te instead of the true state to calculate the di ff eren ce between the ap proxim ated PCRLBs, thus the FIM m atrices (i.e., D 11 k , D 12 k and D 22 k should be represented , ther efore, th e den sity f unction p ( x k + 1 | x k ) and p ( z k + 1 | x k + 1 ) fr om ( 1) and (2) sho uld b e firstly form ulated explicitly . A. A GF b y the F irst-two Or der Mome nt of State Estimate Assume that th e first and secon d moment estimation of state x k is kn own a nd given b y ˆ x k and ˆ P f k = E h ˜ x k ˜ x ′ k | z 1: k i , and also assume th at the distribution of x k + 1 can be ap proximate d by a Gaussian. W e immediately hav e x k + 1 ≈ N h x k + 1 ; ¯ x k + 1 , P x k + 1 i , (9) where ¯ x k + 1 = E [ x k + 1 | z 1: k ] ≈ ˆ f k + ˘ f k , in which ˆ f k = f k ( ˆ x k ), ˘ f k = 1 2 P n i = 1 e i tr h ˆ S f k , i ˆ P f k i , e i ∈ R n × 1 denotes the i -th unit n ormal vector in colu mn shape, and t r [ · ] de notes trace operatio n. ˆ S f k , i = ∇ x k h ∇ x k f k , i ( x k ) i ′ is the Hessian matrix of i -th element f k , i ( x k ) o f the vector-v alued function f k ( x k ). Notation ˆ F f k = h ∇ x k f ′ k ( x k ) i ′ = h ∂ f k , i ( x k ) /∂ x j i n × n denotes the Jacob ian matrix with n × n dimension, P x k + 1 = ˘ P x k + 1 + Q k , ˘ P x k + 1 = ˆ F f k ˆ P f k ( ˆ F f k ) ′ + 1 2 P n i = 1 P n j = 1 e i e ′ j tr h ˆ S f k , i ˆ P f k ˆ S f k , j ˆ P f k i . Similar to (9), th e Gaussian form of the m easurement z k can be ap proxima ted b y z k ≈ N h z k ; ¯ z k , P z k i , (10) where the expectation ¯ z k = E [ z k | x k ] ≈ ˆ h k + ˘ h k , the covari- ance P z k ≈ R k + ˘ P z k , in wh ich ˘ h k = 1 2 P m i = 1 e i tr h ˆ S h k , i ˆ P h k i , ˘ P z k = ˆ F h k ˆ P h k ( ˆ F h k ) ′ + 1 2 P m i = 1 P m j = 1 e i e ′ j tr h ˆ S h k , i ˆ P h k ˆ S h k , j ˆ P h k i . The term s ˆ h k , ˆ F h k and ˆ S h k , i are si milar to th e de finitions of ˆ f k , ˆ F f k and ˆ S f k , i in (9), respectively . B. A GF b y the F irst Or der Momen t of State Estimate As an alternative to the app roximatio n p resented in Section III-A, we use the state estimate ˆ x k to represent x k + 1 and z k . By den oting this versio n of re presentation as x ∗ k + 1 and z ∗ k , we have x ∗ k + 1 ≈ N h x ∗ k + 1 ; ˆ f k , Q k i , (11) z ∗ k ≈ N h z ∗ k ; ˆ h k , R k i , (12) where the definition s of ˆ f k and ˆ h k are sam e as that in Section III-A. IV . A ppr oxima ted FIM A. The Case Using Mea n and Covariance According to d istribution of x k + 1 and z k in (9) an d ( 10), the log-PDF of state and me asurement, given by x k and x k + 1 , can be re spectiv ely formu lated by log p ( x k + 1 | x k ) = c 1 − 1 2 log det h P x k + 1 i − 1 2 ( x k + 1 − ¯ x k + 1 ) ′ × ( P x k + 1 ) ′ ( x k + 1 − ¯ x k + 1 ) i , (13) log p ( z k + 1 | x k + 1 ) = c 2 − 1 2 log det h P z k + 1 i − 1 2 ( z k + 1 − ¯ z k + 1 ) ′ × ( P z k + 1 ) ′ ( z k + 1 − ¯ z k + 1 ) i , (14) where c 1 and c 2 are co nstants. Calculate the deriv atives of log p ( x k + 1 | x k ) a nd log p ( z k + 1 | x k + 1 ) with respectiv e to x k and x k + 1 respectively , specifically we have ∇ x k + 1 log p ( x k + 1 | x k ) = − ( P x k + 1 ) − 1 ( x k + 1 − ¯ x k + 1 ) , (15) then con sider the definitions of FIM in (6)-(8) and after algebra arrang ement, finally we obtain D 11 k = n X i = 1 n X j = 1 e i e ′ j ∂ ¯ x ′ k + 1 ∂ x i k ( P x k + 1 ) − 1 ∂ ¯ x k + 1 ∂ x j k + 1 2 tr ( P x k + 1 ) − 1 ∂ P x k + 1 ∂ x i k ( P x k + 1 ) − 1 ∂ P x k + 1 ∂ x j k , (16) D 12 k = − ∂ ¯ x ′ k + 1 ∂ x k ( P x k + 1 ) − 1 , (17) D 22 k = ( P x k + 1 ) − 1 + n X i = 1 n X j = 1 e i e ′ j ∂ ¯ z ′ k + 1 ∂ x i k + 1 ( P z k + 1 ) − 1 ∂ ¯ z k + 1 ∂ x j k + 1 + 1 2 tr ( P z k + 1 ) − 1 ∂ P z k + 1 ∂ x i k + 1 ( P z k + 1 ) − 1 ∂ P z k + 1 ∂ x j k + 1 . (18) It is explicit that the right h and of (1 6) and the seco nd term on the r ight hand of (18) is similar with that in [12]. W e o bserve that all deriv atives inv olved in (16)-(1 8) can be ev aluated by using the mean an d cov ar iance of the state estimate instead of th e true state. So far , based on the Gau ssian model assumption, we formu late the matrices used by the PCRLB in (4) as above. In or der to obtain the di ff erence betwe en the two kind s of app roximated PCRLBs, matrices in (1 6)-(18) should be decomp osed as shown in the fo llows. Accord ing to the well- known m atrix inversion lemma [13], we h av e a simplified formu las a s below ( A + B ) − 1 = A − 1 − ( AB − 1 A + A ) − 1 , (19) where A , B are the no nsingular matr ices, an d th e in version of every ma trix is assumed to exist. F o r the matrix D 11 k , we can decompose th e inversion of the c ov ar iance matrix P x k + 1 defined in (9) in to two terms, ( P x k + 1 ) − 1 = Q − 1 k − Ψ x k , whe re Ψ x k = h Q k ( ˘ P x k ) − 1 Q k + Q k i − 1 . Substituting it and the e xp ression of ¯ x k + 1 into (16), after some arrangemen ts yield D 11 k = n X i = 1 n X j = 1 e i e ′ j ∂ ˆ f ′ k ∂ x i k Q − 1 k ∂ ˆ f k ∂ x j k | {z } Σ ∗ 11 +Σ 11 , (20) where Σ 11 = 1 2 n X i = 1 n X j = 1 e i e ′ j tr ( P x k + 1 ) − 1 ∂ P x k + 1 ∂ x i k ( P x k + 1 ) − 1 ∂ P x k + 1 ∂ x j k + n X i = 1 n X j = 1 e i e ′ j ∂ ˘ f ′ k ∂ x i k Q − 1 k ∂ ˆ f k ∂ x j k + ∂ ¯ x ′ k + 1 ∂ x i k Q − 1 k ∂ ˘ f k ∂ x j k − Ψ x k ∂ ¯ x k + 1 ∂ x j k . For matrix D 22 k , we deco mpose ( P z k + 1 ) − 1 = R − 1 k + 1 − Ψ z k + 1 , where Ψ z k + 1 = h R k + 1 ( ˘ P z k + 1 ) − 1 R k + 1 + R k + 1 i − 1 . Substitutin g it and the expression of ¯ z k into (18) y ields D 22 k = Q − 1 k + n X i = 1 n X j = 1 e i e ′ j ∂ ˆ h ′ k + 1 ∂ x i k + 1 R − 1 k + 1 ∂ ˆ h k + 1 ∂ x j k + 1 | {z } Σ ∗ 22 +Σ 22 , (21) where Σ 22 = 1 2 n X i = 1 n X j = 1 e i e ′ j tr ( P z k + 1 ) − 1 ∂ P z k + 1 ∂ x i k + 1 ( P z k + 1 ) − 1 ∂ P z k + 1 ∂ x j k + 1 − Ψ x k + n X i = 1 n X j = 1 e i e ′ j ∂ ˘ h ′ k + 1 ∂ x i k + 1 R − 1 k + 1 ∂ ˆ h k + 1 ∂ x j k + 1 + ∂ ¯ z ′ k + 1 ∂ x i k + 1 R − 1 k + 1 ∂ ˘ h ′ k + 1 ∂ x j k + 1 − Ψ z k + 1 ∂ ¯ z k + 1 ∂ x j k + 1 . For matrix D 12 k , sub stituting ( P x k + 1 ) − 1 = Q − 1 k − Ψ x k and ¯ x k + 1 ≈ ˆ f k + ˘ f k into (17) y ields D 12 k = − ∂ ˆ f ′ k ∂ x k Q − 1 k | {z } Σ ∗ 12 + ∂ ˆ f ′ k ∂ x k + ∂ ˘ f ′ k ∂ x k Ψ x k − ∂ ˘ f ′ k ∂ x k Q − 1 k | {z } Σ 12 . (22) So afte r the above steps, we su ccessfully rewrite the m atrices D 11 k , D 22 k and D 12 k into two parts respectively , then we submit expressions in (20)-(22) into the definition o f FIM in (4), using th e matrix in version lemma again , after so me expansions and arrang ements yield J k + 1 = Σ ∗ 22 − Σ ′∗ 12 J k + Σ ∗ 11 − 1 Σ ∗ 12 | {z } Θ + Π , (23) where Π = Σ 22 − ( D 12 k ) ′ ( J k + D 11 k ) − 1 Σ 12 − h Σ ′ 12 ( J k + D 11 k ) − 1 − Σ ′∗ 12 Φ i Σ ∗ 12 , Φ = h ( J k + Σ ∗ 11 )( Σ 11 ) − 1 ( J k + Σ ∗ 11 ) + ( J k + Σ ∗ 11 ) i − 1 . B. The Case Using o nly Mean By c omparin g the mean-ba sed Gaussian form presented in (16)-(18), we straigh tforwardly arrive at (use the sup erscript symbol ∗ to distinguish with tha t in Section I V -A): D 11 ∗ k = Σ ∗ 11 , D 12 ∗ k = Σ ∗ 12 and D 22 ∗ k + 1 = Σ ∗ 22 . Then substituting matrices of D ∗ s into th e definition of FIM in (4) yields J ∗ k + 1 = D 22 ∗ k + 1 − ( D 12 ∗ k ) ′ ( J k + D 11 ∗ k ) − 1 D 12 ∗ k ≡ Θ . (24) V . D ifference B etween the T wo PCRLB A ppr oxima t ions Our final aim is to calculate the di ff erence betwee n the two ap proxima ted PCRLBs, wh ere the o ne a pprox imation employ the first-two o rder mo ment of state estimate and the other one o nly use the first o rder moment. Performin g the matrix inv ersion lemma on the FIM J k + 1 defined in (23) ag ain, we get the PCR LB J − 1 k + 1 directly J − 1 k + 1 = Θ − 1 − ( Π − 1 Θ + I ) − 1 Θ − 1 . (25) Explicitly the di ff er ence between th e two kinds o f app rox- imated PCRLBs, d efined b y ˜ J − 1 k + 1 , J ∗− 1 k + 1 − J − 1 k + 1 , c an be formu lated b y ˜ J − 1 k + 1 = ( Π − 1 Θ + I ) − 1 Θ − 1 = ( Π − 1 J ∗ k + 1 + I ) − 1 ( J ∗ k + 1 ) − 1 , (26) where I denotes an identity m atrix with appropr iate dimen- sion. In Section VI, Monte Carlo simulations show that the bound J ∗− 1 k + 1 is always high er than the J − 1 k + 1 , that is to say , the 5 10 15 20 25 30 35 40 45 50 1 2 3 4 5 6 7 8 9 10 11 Time(second) RMS error PF UKF Fig. 1. Comparison RMS errors of state estimation generated by two di ff erent estimators: Particle filter (PF) and Unscented Kalman filter (UKF). 100 runs of Monte Carlo simulations and the initial number of particles is 1000. J − 1 k + 1 is more closer to the true PCRLB th an that of J ∗− 1 k + 1 , of course this is f or th e case with finite nu mber of pa rticles. For the situatio n as sampling N tends to infinity , the con vergence theoretically needs fur ther in vestigation. VI. E xperiment al R esul ts T o e valuate the p erform ance of the p roposed alg orithm, the following typical uni variate nonlin ear model [14] is studied: x k = 0 . 5 x k − 1 + 25 x k − 1 1 + x 2 k − 1 + 8 cos [1 . 2( k − 1)] + w k , y k = x 2 k 20 + v k , k = 1 , 2 , · · · , T (27) here using w k ∼ N (0 , σ 2 w ) d enotes th e pr ocess no ise, and v k ∼ N (0 , σ 2 v ) is the measu rement noise. Data was generated by using σ 2 w = 1, σ 2 v = 5, and T = 5 0. The initial prior distrib ution was chosen as p ( x 0 ) ∼ 2 0 × N (0 , 1) . For comp arison purposes, we implemen ted two state es- timation methods: 1) Th e unscen ted Kalman filter (UKF) where it is not nece ssary to compu te Jaco bian matrices and the pe rforman ce is accurate to the third-o rder term (in the T aylo r series expansion ) for Gau ssian inputs, even f or nonlinear sy stems. For no n-Gaussian inpu ts, appro ximations are accu rate to at least the seco nd-or der term [15]. 2) The particle filter (PF), wher e an initial sample size N = 1000 is a dopted, an d 100 runs of Monte Carlo simulation are perfor med. Filtering accuracy by using th e same trajec tories is shown in Fig.1. Her e the r oot mean squar e (RMS) error is used as an e valuation criterion . It should be firstly no ted that f or the PF the in itial n umber of samples is gener ally ch osen by trial-and -error and th at its acc uracy can be improved by increasing the sample size. Secon dly , acc ording to [ 14], the likelihood p ( y k | x k ) has a bim odal natu re whe n x k > 0, and this bimo dality cau ses the state too acutely fluctuate and complicates to track u sing co n vention al filtering . The 5 10 15 20 25 30 35 40 45 50 1 1.5 2 2.5 3 Time(second) PCRLB CRLB−TRUE CRLB−PF CRLB−UKF Fig. 2. Comparison of th e true posterior CRLB wit h the first type of approximat ions. The appro ximated PCRLB corresponds to the method of “ex act model and expecta tion of st ate estimati on”, and were ge nerated by Parti cle filter (PF) and Unscente d Kalman filter (UKF). 100 runs of Monte Carlo simulation. 5 10 15 20 25 30 35 40 45 50 1 1.5 2 2.5 3 3.5 4 4.5 Time(second) PCRLB CRLB−TRUE CRLB−PF * CRLB−UKF * Fig. 3. Comparison of the true posterior CRLB with the sec ond type of approx imations. The ap proximated PCRLB corresponds to the method of “T ay lor expanded m odel and first-two mom ents of state estimation”, the two estimat ors: Partic le filter (PF) and Unscented Kalman filter (UKF), were employ ed. 100 runs of Monte Carlo simulation. RMS er ror in Fig.1 clear ly reflec ts th e e ff ect of the n onlinear dynamic phen omena. Fig.2 shows the comp arison of th e tr ue PCRLB and the approa ch of “exact mod el a nd mean o f state e stimation”, which re fers the recursi ve FIM fo rmulated by (24 ). W e can see from the figure that th ere exists an explicit error betwee n the true PCRLB a nd both approx imations. The PCRLB correspo nding to UKF is overall worse than the PCRLB generated by the PF . As expected , the tru e PCRLB is a lower bound (a lw ay s lower than the a pprox imations in all in stants). In Fig.3, th e tr ue posterior CRLB is com pared with the ap proach of “T aylor series exp anded m odel and first- two orde r mo ments of state estimation”. This appro ach is perfor med by sub stituting Eq n.(16)-(18) into (4) and u sing 5 10 15 20 25 30 35 40 45 50 0 0.5 1 1.5 2 2.5 Time(second) PCRLB GAP PF UKF Fig. 4. Comparison of two kinds of theore tical gap of poste rior CRLB, upper and lower plots corresponds to Unscented Kalman filter (UKF) and P article filte r (PF), respect ive ly . As expe cted, the gap improve a s the accura cy of filtering improves. first-two ord er mo ments of state estimation as par ameters. we observe that both estimated PCRLBs are mo re accurate approx imations com pared with the tr ue PCRLB. In many instants the PCRLB co rrespond ing to PF is clo ser to th e true PCRLB th an the appr oximation usin g the UKF . Due to the acute nonlin earity of the system, the PCRLBs appear strongly oscillatory thr ougho ut the simulation. W e can directly calcu late the di ff er ence between th e two PCRLB appr oximation s: PCR LB in Fig. 2 minus the corr e- sponding o ne in Fig.3. Howe ver, as a theoretica l analy sis, we employ the f ormula in ( 26) and the calculated results are presented in Fig. 4. Th e PCRLB genera ted by the PF is generally m ore accurate throughou t simu lation. When the initial sampling used by PF w as increased, the accuracy of its cor respondin g PCRLB was impr oved. VII. C onclusion In th is paper, we consider ed the prob lem of approxim ate calculation of CRLB by using Gaussian assumption s and the m oments o f state estimate instead of using true state. T wo kind s of appro aches were prop osed: One was an exact model using the expec tation of state estimate; the o ther w as an ap proxim ated model using th e expectatio n and covariance of state estimate. Further more, the di ff erenc e between the two estimated CRLBs was for mulated analytically . By using state estimators of PF and UKF , we compar ed th e propo sed approx imations with true PCRLB. Simulation results demo n- strated the significan ce and validity of our approa ch. R eferences [1] B. D. O. Ande rson and J. B. Moore, Optimal F iltering . Engle wood Cli ff s, NJ: Prentic e-Hall, 1979 . [2] H. L. v an Trees, Detecti on, Estimati on and Modulati on The ory . New Y ork: Wile y , 1968. [3] T . H. Kerr , Status of CR-like lo wer bounds for nonline ar filtering, IEEE T rans. A er osp. Electr on. Syst. , V ol.25: 590-600, Sept.1989. [4] B. Z. Bobro vsky and M.Zakai, A lowe r bound on the estimati on error for Marko v processes, IEE E T rans. Automat. Contr . , V ol.A C-20: 785- 788, Dec.1975. [5] Ming Lei, Barend J. v an W yk and Y ong Qi, ”Onl ine E stimatio n of the Approximat e Posterior Cramer -Rao Lower Bound for Discrete- time Nonlinea r Filtering” , IEE E T rans. on Aer ospace and Electr onic Systems , to appear . [6] J. I. Galdos, A Cramer-Rao bound for m ultidi mensional discret e-time dynamica l systems, IEEE T r ans. Automat. Cont r . , V ol.A C-25: 117-119, Feb . 1980. [7] P . T ichavsk y , C. Mura vchik, A. Nehorai, Poster ior Cramer-Rao Bounds for Discrete-Ti me Nonlinea r Filtering . IEEE T rans. Signal P r ocessing , V ol.46(5): 1386-1396, May 1998. [8] Farin a, A., Ristic, B., and Timmone ri, L ., Cramer-Ra o bound for nonline ar filtering with Pd¡1 and its application to targe t tracking, IEEE T rans. Signal Pro cess. , V ol.50(8):1916-1924. 2002. [9] B. Ristic, A. Farina and M. Hernandez, Cramer- Rao lower bound for track ing multipl e targets, IEE P r oc. Radar Sonar Navig. , V ol.151(3):129-134, June 2004. [10] Ruixin Niu, Peter W illett, and Y aakov Bar-Shalom, Matrix CRLB Scaling Due to Measurements of Uncertain Origin, IEE E T r ans. Signal Pr ocess. , V ol.49(7): 1325-1335, July 2001. [11] M. Simand l, J. Kralo vec, and P . Ti chavsky . Filtering, predic tiv e and smoothing Cra mer-Rao bounds for discrete-t ime nonlinear dynamic systems. Automatica , V ol.37(11):17 03-1716, Nov . 2001. [12] S.M.Ke y , Fundamental of Statistical Signal P r ocessing: Estimation Theory , Prentice Hall, Englew ood Cl i ff s, NJ, 1993. [13] H.Eves, Elementary Matrix Theory , Dover , Ne w Y ork, 1966. [14] K otecha J .H. and Djuric P . M., Gaussian particle filterin g. IEEE Tr ans. Signal Proce ss. , V ol.51(10):25 92-2601. Oct. 2003. [15] S. J. Julier , J . K. Uhlmann and H. F . Durrant-Whyte . A New Approach for Filterin g Nonlinear Systems. The Pr oceedings of the American Contr ol Confe rence , Seattl e, W ashington., pages 1628-1632. 1995.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment