눈 로봇을 이용한 의도 표현 및 마스코트 로봇 시스템
가정용 로봇이 인간과 친근하게 소통하기 위해, 눈 로봇의 안구·눈꺼풀 움직임을 ‘쾌감‑각성’ 2차원 공간에 매핑하고, 정보의 중요도와 확신도를 퍼지 추론으로 변환해 ‘각성‑수면’ 축에 반영한다. 이를 통해 로봇은 메인 정보와 함께 그 신뢰도·우선순위를 눈동자 움직임으로 직관적으로 전달한다. 시스템은 5대의 소형 눈 로봇과 음성 인식·추천 엔진을 RT‑미들웨어로 통합한 마스코트 로봇 플랫폼에 적용된다.
저자: ** - Yoichi Yamazaki (山崎 洋一) – 도쿄공업대학 - Fangyan Dong (董 芳艶) – 도쿄공업대학 - Yuta Masuda (増田 裕太) – 도쿄공업대학 - Yukiko Uehara (上原 由記子) – 도쿄공업대학 - Petar Kormushev – 도쿄공업대학 - Hai An Vu – 도쿄공업대학 - Phuc Quang Le – 도쿄공업대학 - Kaoru Hirota (廣田 薫) – 도쿄공업대학 **
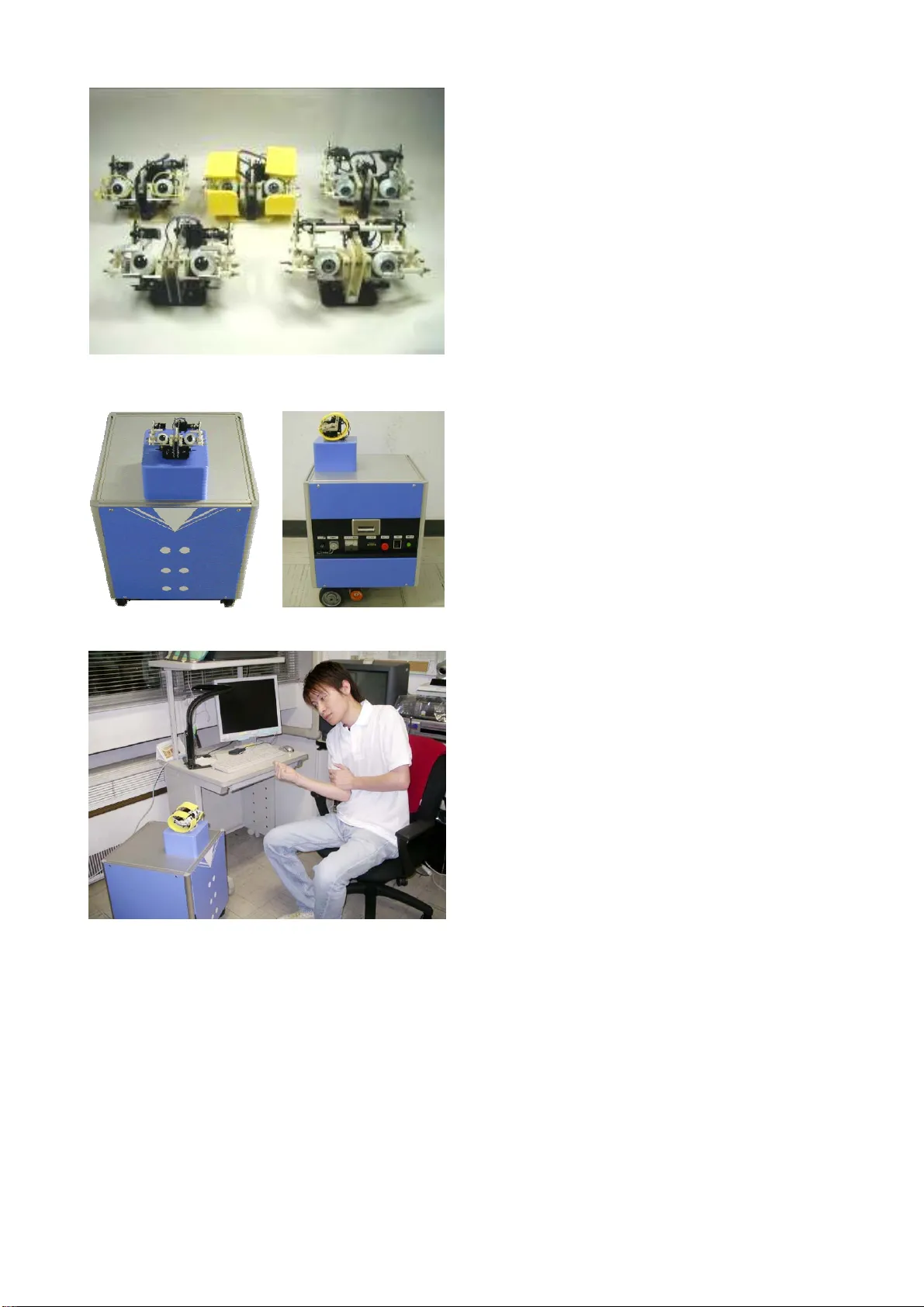
본 논문은 가정용 로봇이 인간과 친근하게 소통하기 위해 필요한 ‘의도 표현(intention expression)’ 메커니즘을 눈 로봇을 매개로 구현한다. 연구 배경으로는 로봇이 단순히 작업을 수행하는 수준을 넘어, 인간에게 심리적으로 접근 가능한 인터페이스가 요구된다는 점을 제시한다. 특히 얼굴 중에서도 눈은 인간의 감정과 의도를 가장 직관적으로 전달하는 부위로 알려져 있어, 눈 로봇을 활용한 연구가 활발히 진행되고 있다
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기