Fuzzy inference based mentality estimation for eye robot agent
Household robots need to communicate with human beings in a friendly fashion. To achieve better understanding of displayed information, an importance and a certainty of the information should be communicated together with the main information. The pr…
Authors: ** - Yoichi Yamazaki (山崎 洋一) – 도쿄공업대학 - Fangyan Dong (董 芳艶) – 도쿄공업대학 - Yuta Masuda (増田 裕太) – 도쿄공업대학 - Yukiko Uehara (上原 由記子) – 도쿄공업대학 - Petar Kormushev – 도쿄공업대학 - Hai An Vu – 도쿄공업대학 - Phuc Quang Le – 도쿄공업대학 - Kaoru Hirota (廣田 薫) – 도쿄공업대학 **
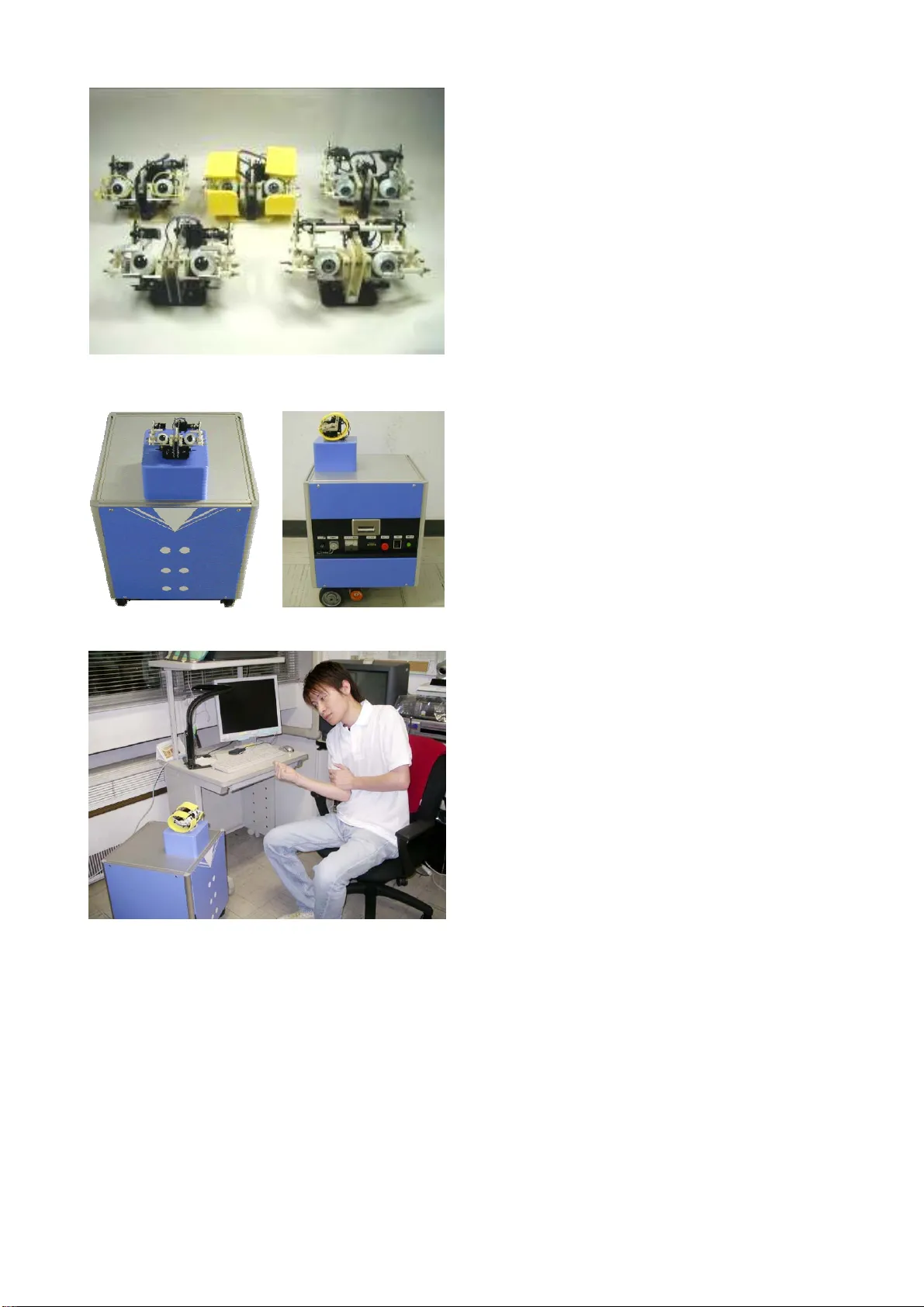
眼球ロボットを用いた意図表出 及びマスコットロボットシステムへの応用 Fuzzy Inference based Mentality Estimation for Eye Robot Agent 山崎 洋一 董 芳艶 増田 裕太 上原 由記子 Kormushev Petar V u Hai An LE Phuc Quang 廣田 薫 Y oichi Y amazaki, Fangyan Dong, Y uta Masuda, Y ukiko Uehara, Petar Kormushev , Hai An V u, Phuc Quang Le, and Kaoru Hirota1 東京工業大学 T okyo Institute of T echnology Abstract: Household robo ts need to communicate with hum an beings in a friendly fashion. T o achieve better understanding of displayed information, an im portance and a cer tainty of the infor mation should be communicated t ogether with the m ain information. The proposed int ent expression system aim s to convey this additional in formation using an eye rob ot. The eye motions ar e represented as states in a pleasure-arousal space model. Change of the model stat e is calculated by fuzz y inference according to the importance and certaint y of the displayed inf ormation. This change influ ences the arousal-sleep coordinate in the space which corr esponds to activen ess in communication. T he eye robot provides a basic interface f or the mascot robot system wh ich is an easy to understan d information terminal for home environments in a humatronics society . 1. はじめに 近年, ロボット技術が進歩するにつ れてロボットが 家庭環境へ普及することへの期待が高まっている. 人間への親しみやすさが重要となる家庭環境下のロ ボットには,単にタスクをこなすだけでなく,親し み易いインタフェースが必要である.またロボット は情報端末として,キーボードなどをインタフェー スとする既存の情報端末よりも,人にやさしいイン タフェースを持つものとなり得る.親しみやすさに は心理表出が重要であり,心理表出には顔が重要で あり,中でもとくに目が重要であることから,眼球 ロボットによる心理表出の研究が行われている [1] . 本研究では眼球ロボットを人間との対話インタフェ ースとして用いた室内分散型の家庭用情報端末ロボ ットアプリケーションであるマスコットロボットシ ステム,および提示する主情報に付随する情報を意 図として表出する眼球ロボットによる意図表出を提 案する. 2. マスコットロボットシステム 人間の生活空間において人間と共存す るロボット は,エンターテインメントや高齢者支援などの観点 で今後の発展が期待されている分野であるが,ロボ ットと人間の共存を考えた場合,発話などの明示的 なコミュニケーションを行っていない時のロボット の振る舞いを考えることは重要であ る. 本研究では音声認識により目蓋と眼球 を有する小 型コミュニケーションロボットに対する人間の語り かけから人間の興味対象や嗜好を推定し,関連情報 の提供を行うマスコットロボットシステム提案する. 提案システムでは家庭環境において人間の興味対象 や嗜好に関する情報を,室内に分散配置された小型 コミュニケーションロボットが人間と生活を共にす る中で獲得し, We b 情報推薦エンジンを利用して関 連する情報を提供する.マスコットロボットシステ ムの機器構成を図1に示す.5台の小型コミュニケ ーションロボット,音声認識モジュール,情報推薦 エンジンを RT ミドルウェアによって統合したマ ス コットロボットシステムを,家庭環境を想定した室 内に構築する.小型コミュニケーションロボットと して5台の眼球ロボットを用いる.眼球ロボットを 図2に示す. 眼球ロボットは人間を 参考にして 2 自 由度の目蓋と 3 自由度の眼球を有する. 音声認識モ ジュールの性能を補うため1台の眼球ロボットを自 走型とする.自走型眼球ロボットを 図3に示す. 図1.マスコットロボットシステム の構成 TB2-4 23rd Fuzzy System Symposium (Nagoya, August 29-31, 2007) 387 図2.5台の眼球ロボット 図3.自走型眼球ロボット 図 4 .ロボットとのコミュニケーション 3. 意図表出 人間とコミュニケーションするロボットアプリケ ーションを考える場合,認識性能の問題から認識に 不確定な情報を含む可能性がある.また情報推薦に 際して,優先順位付きの複数の結果を提示する可能 性がある.このような状況では,主情報に付随する 情報をロボットの意図として,主情報をともにさり げなく提示する必要がある.そこで提示情報ととも にロボット自身の情報理解,提示情報の信頼性,重 要性をわかりやすく提示するための眼球ロボットに よる意図表出を提案する. 意図表出と並ぶコミュニケーションロボットに 必要な表出として, 心理表 出がすでに研究されてい る. 眼による心理表出動作 は単独では快-覚醒平面 上に配置される. 快-覚醒 平面は対話への積極性を 表す「覚醒- 睡眠」軸と 対話者への即時的な好意 を 表す 「快-不快」 軸の 2 軸からなる. コミュニケー ションにおける心理状態の推移を考 慮し, 親和の1 軸を追加した親和型快- 覚醒空間が提案されてい る [1] . 意図表出では音声認識により入力された情報に対 して,入力に対する確信度,出力に対する信頼度, 重要度を算出しあわせて, 「覚醒-睡眠」 軸に投影す ることにより心理表出を加味した意図表出を実現す る. 4. おわりに 家庭環境で人間と共存するロボットアプリケー ションとしてマスコット ロボットシステムを提案 し,その意図表出システム を構築する.マスコッ ト ロボットシステムでは, 5台の小型コミ ュニケーシ ョンロボット,音声認識モジュール,情報推薦エン ジンを RT ミドルウェアによって統合する.眼球 ロ ボットは人間を参考にして 2 自由度の目蓋と 3 自由 度の眼球を有し,5台のうち 1台を自走型にする. 人間とのコミュニケーションを考慮 し, 提示する主 情報に付随する情報を意 図として表出する眼球ロ ボットによる意図表出を提案する .入力 された情報 に対して,入力に対する確 信度,出力に対する信 頼 度,重要度を算出しあわせて , 「覚醒-睡眠」軸に 投影することにより心理 表出を加味した意図表出 を実現する. 提案システムでは, インタフェースに操 作の習得 を必要とするキーボードなどではな く, 人間同士の コミュニケーションとお なじ音声認識を用いてい る.マスコッ トロボットシステムは既存 の情報端末 に比べて人間やさしいイ ンタフェースを持つロボ ットシステムとして,家庭に普及し 得る. 謝辞 この研究は平成 17 年度~1 9 年 NEDO 度次世代ロボッ ト共通基盤開発プロジェクト 「音声認識用デバイス 及びモジュールの開発」 の補助を受けて行われたも のである. 参考文献 [1] Yoichi Yam azaki, Fangy an Don g, Yukiko Uehara, Yutaka Hatakey ama, Haji me Nobuha ra, Yasufum i Takama, Kaoru Hirota, “Mentality Expression in Affinity Pleasure-Arousal Space using Ocular a nd Eyelid Motion of Eye Robot”, SCIS&ISIS2006, 2006 連絡先 山崎 洋一 E-mail: yama@hrt.dis.tit ech.ac.jp 388
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment