Quantum Inspired Vehicular Network Optimization for Intelligent Decision Making in Smart Cities
Connected and automated vehicles require city-scale coordination under strict latency and reliability constraints. However, many existing approaches optimize communication and mobility separately, which can degrade performance during network outages …
Authors: Kamran Ahmad Awan, Sonia Khan, Eman Abdullah Aldakheel
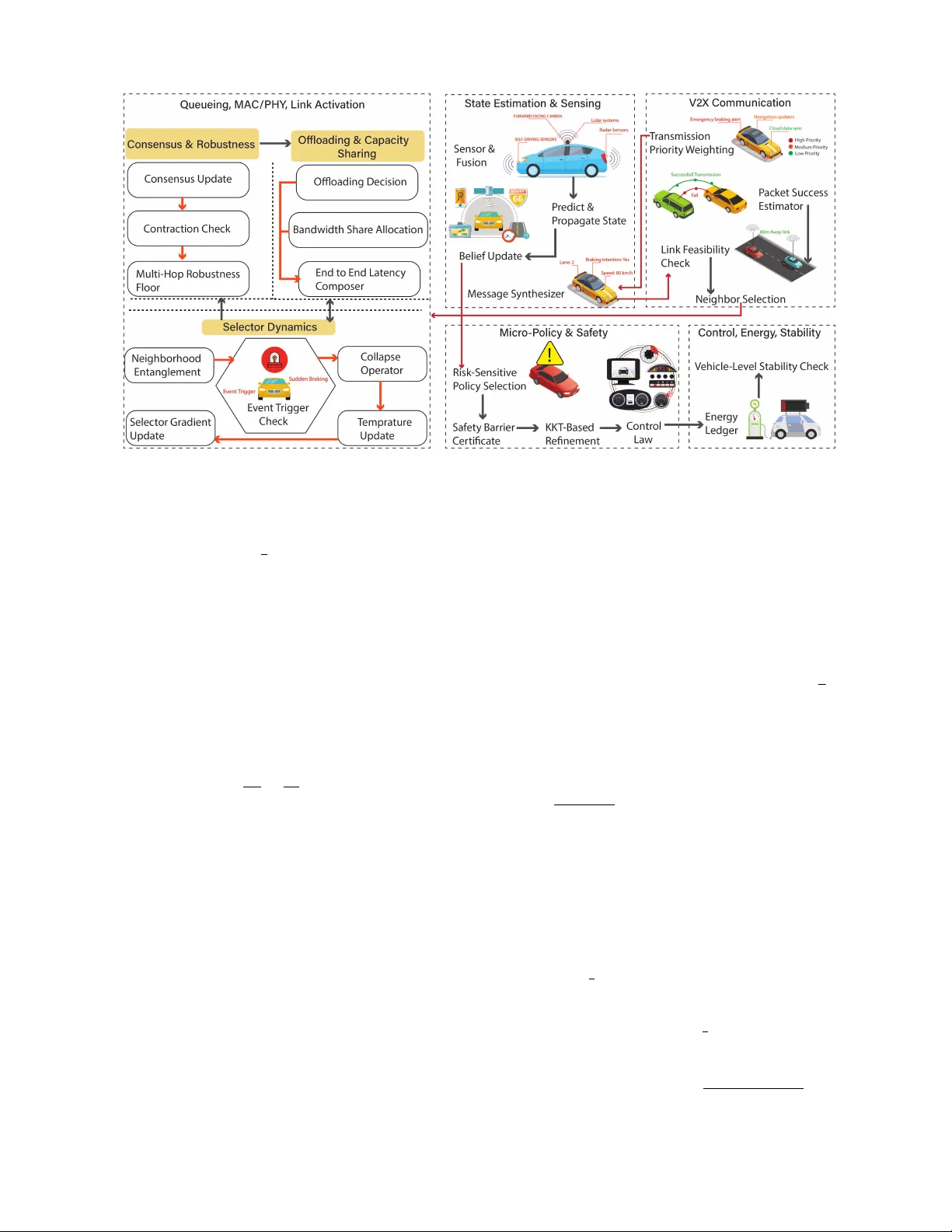
1 Quantum Inspired V ehicular Network Optimization for Intelligent Decision Making in Smart Cities Kamran Ahmad A wan, Senior Member , IEEE , Sonia Khan, Member , IEEE , Eman Abdullah Aldakheel, Saif Al-Kuw ari, Senior Member , IEEE , and Ahmed Farouk, Senior Member , IEEE Abstract —Connected and automated vehicles r equire city- scale coordination under strict latency and reliability tar gets, yet many approaches optimize communications and mobility separately , degrading under outages and compute contention. W e present QIVNOM, a quantum-inspired framework that jointly optimizes V2V/V2I communication and urban traffic control on classical edge–cloud hardware (no quantum proces- sor requir ed). Candidate routing–signal plans are encoded as probabilistic superpositions and ar e updated via sphere-projected gradients with annealed sampling to minimize a regularized cost. An entanglement-style regularizer couples networking and mobility decisions, while Tchebycheff multi-objective scalariza- tion with feasibility projection enfor ces latency and reliability constraints. Robustness is enhanced through chance constraints and L yapunov-drift control. Plans are assigned to fog nodes via entropic optimal transport, and vehicle-lev el CV aR micro-policies align local safety with global guidance. In METR-LA–calibrated SUMO–OMNeT++/V eins simulations over a 5 × 5 km urban map with IEEE 802.11p and 5G NR sidelink, QIVNOM reduces the mean end-to-end latency to 57.3 ms ( ≈ 20% below the best baseline). During incidents, latency is 62 ms vs 79 ms ( − 21 . 5% ); with RSU outages, 67 ms vs 86 ms ( − 22 . 1% ). Packet delivery av erages 96.7% ( +2 . 3 pts), reliability 96.7% overall (RSU-outage 96.8% vs 94.1%), and corridor -closure tra vel metrics improv e (A TT 12.8 min/33% vs 14.5 min/37%), demonstrating consistent gains under str ess. These r esults position QIVNOM as a practical building block f or smart-city intelligent transportation systems and connected consumer electronics, enabling safer , faster , and more reliable mobility on commodity edge–cloud infrastructure. Index T erms —Connected V ehicles, Smart Cities, Quantum- Inspired Algorithms, V2X Communication, F og Computing, Intelligent T ransportation Systems I . I N T R O D U C T I O N A. An Overview Kamran Ahmad A wan is with the Faculty of Information T echnology & Numerical Sciences, Department of Information T echnology , The University of Haripur , Haripur 22620, Khyber Pakhtunkhwa, Pakistan (e-mail: kam- ranawan.2955@gmail.com, kamranahmad@ieee.org, ) Sonia Khan is with the Department of Y outh Affairs, Y outh Office Haripur , Haripur 22620, Gov ernment of Khyber Pakhtunkhwa, Pakistan e-mail: (soni- akhan1.2981@gmail.com) Department of Computer Sciences, College of Computer and Information Sciences, Princess Nourah Bint Abdulrahman University , Riyadh, Saudi Arabia. e-mail: (Eaaldakheel@pnu.edu.sa) Saif Al-Kuwari is with the Qatar Center for Quantum Computing, College of Science and Engineering, Hamad Bin Khalifa University , Doha, Qatar. e- mail: (smalkuwari@hbku.edu.qa). A. Farouk is with the Qatar Center for Quantum Computing, Col- lege of Science and Engineering, Hamad Bin Khalifa University , Doha, Qatar and the Department of Computer Science, Faculty of Comput- ers and Artificial Intelligence, Hurghada University , Hurghada, Egypt. e- mail:(ahmed.farouk@sci.svu.edu.eg). Corresponding Author: Kamran Ahmad A wan (kamranahmad@ieee.org) T HE dev elopment of urban transportation increasingly depends on connected vehicle infrastructures that form the foundation of intelligent transportation systems (ITS) [1]. V ehicle-to-V ehicle (V2V) and V ehicle-to-Infrastructure (V2I) communications—collectiv ely referred to as V2X—enable dynamic vehicular networks to exchange time-sensitive data between mobile nodes and roadside units [2]. These net- works require high reliability and low latency to support dense traffic conditions and continuous mobility , particularly in urban environments [3]. Howe ver , con ventional centralized architectures face limitations in meeting these demands [4]. V ehicular ad hoc networks (V ANETs), in particular , are prone to frequent topology changes and require adaptiv e and fault- tolerant protocols to ensure consistent data deliv ery under varying network conditions [5]. Beyond communication, the functionality of V2X systems is heavily dependent on the computational infrastructure. Edge and fog computing frameworks are crucial to enable low- latency processing, as the y facilitate localized decision-making and reduce reliance on remote cloud servers [6]. The deploy- ment of fog nodes near data sources enables timely analysis, which is crucial for safety-critical applications [7]. Howe ver , integrating distrib uted computing resources into a cohesi ve and responsiv e architecture presents sev eral challenges [8]. The scale and complexity of urban mobility systems introduce a high-dimensional optimization problem in volving interrelated components such as routing, signal control, spectrum man- agement, and computation offloading [9]. Traditional heuristic approaches and many machine learning models often fall short in handling this comple xity , particularly when real-time perfor - mance and system-wide coordination are required. Although some adapti ve methods show improved local performance, their scalability and consistency in large-scale deployments remain limited [10]. B. Related W ork Analysis Recent studies have in vestigated secure and reliable vehic- ular communication by adopting advanced trust management strategies. Quantum-inspired reinforcement learning, when in- tegrated with permissioned blockchain systems, has shown promise in protecting decentralized vehicular networks while enabling adaptive resource allocation for vehicular services [11], [12]. V ariational quantum algorithms incorporating in- feasibility constraints have been applied to improv e collision av oidance routing in adversarial data en vironments, thus re- ducing vulnerabilities to packet manipulation and malicious 2 path manipulation [13]. Coev olutionary netw orking frame- works inspired by multiv erse dynamics hav e enhanced the resilience of scale-free IoT topologies, which is crucial to maintaining stable V2X communication during link or node disruptions in dense urban settings [14]. In parallel, decision- making architectures that utilize uncertainty quantification and distributional reinforcement learning hav e been employed to enhance the operational reliability of autonomous systems in scenarios such as uncontrolled intersections [15]. Scalability in vehicular networks has intensified the chal- lenges related to resource allocation and load balancing. T o address these issues, edge–cloud continuum architectures hav e been developed to dynamically distribute computational workloads, supporting mobility prediction and adaptive traffic management in real time [16], [17]. Digital twin-based Internet of V ehicles (IoV) systems ha ve incorporated freshness-aware caching and quantum-inspired dif ferential e volution to enhance task offloading, thereby reducing latency and energy consump- tion in highly dynamic network en vironments [18]. Urban traf- fic optimization has also seen progress through the application of quantum annealing techniques to quadratic unconstrained binary optimization (QUBO) models, facilitating efficient traf- fic signal scheduling and routing strategies [19]. Further- more, attention-based forecasting models have improved the accuracy of spatiotemporal mobility predictions, encouraging proactiv e distribution of computational loads across edge and cloud nodes [20]. The proposed Quantum-Inspired V ehicular Network Optimization Model (QIVNOM) addresses ke y lim- itations of prior approaches, particularly in terms of scala- bility , computational tractability , and adaptability in dynamic urban contexts. By incorporating probabilistic superposition and entanglement principles, QIVNOM enables parallelized optimization across both communication and decision-making layers, offering an integrated framework for vehicular network management. T ables I present a comprehensiv e comparative analysis, highlighting how the proposed QIVNOM framework addresses critical limitations in existing approaches. C. Problem Statement This research addresses the dual challenge of achie ving ultra-low latency and fault-tolerant V2V/V2I communication, along with intelligent decision-making for urban traffic and energy management in smart cities [21], [22]. The objec- tiv e is to jointly optimize communication routing, resource distribution, and large-scale traffic control within a unified framew ork that meets the stringent real-time demands of critical v ehicle safety applications [23]. Existing methods often treat communication performance and traf fic optimization as separate concerns, ov erlooking their interdependencies in a connected urban mobility system, where actions in one domain influence outcomes in the other [24]. This gap underscores the need for an integrated solution that can coordinate vehicular communication and traffic management with high resilience and operational efficiency . T o address this, the proposed work introduces a computa- tional framework inspired by quantum mechanics to explore the combinatorial solution space of urban-scale vehicular net- works [25]. The goal is to design a quantum-inspired algorithm T ABLE I C O M PA R ATI V E A NA L Y S I S O F E X I S T I N G A P P RO AC H E S A N D T H E P R O P O S E D Q I V N O M F R A M E W O R K . A B B R E V I AT I O N S : Q S A = Q UA N T U M - I N S P I R E D S U P E R P O S I T I O N A R C H I T E C T U R E , F T R = F AU LT - T O L E R A N T R O U T I N G , M O O = M U LTI - O B J E C T I V E O P T I M I Z ATI O N , F C C = F O G - C L O U D C O O R D I NATI O N , E A M = E N E R G Y - A W A R E M A NAG E M E N T , D T A = D Y N A M I C T A S K A L L O C A T I O N , U RT = U LT R A - L OW R E S P O N S E T I M E Reference QSA FTR MOO FCC EAM DT A UR T [11] ✓ ✗ ✓ ✗ ✗ ✓ ✗ [19] ✓ ✗ ✓ ✗ ✗ ✗ ✗ [12] ✓ ✓ ✗ ✗ ✗ ✗ ✗ [14] ✗ ✓ ✗ ✗ ✗ ✗ ✗ [18] ✓ ✗ ✓ ✓ ✓ ✓ ✗ [16] ✗ ✗ ✗ ✓ ✓ ✓ ✗ [15] ✗ ✓ ✗ ✗ ✗ ✗ ✗ QIVNOM ✓ ✓ ✓ ✓ ✓ ✓ ✓ that can simultaneously optimize interdependent v ariables such as data routing, traffic signal control, and energy-aw are task assignment. The system is designed to function within a fog–cloud architecture, where latency-sensiti ve tasks are pro- cessed locally , and global coordination is maintained via the cloud infrastructure. This enables proactiv e fault mitigation, adaptation to real-time traffic dynamics, and continuity of service under high mobility and communication variability . D. Overview of the Pr oposed Appr oach The Quantum-Inspired V ehicular Network Optimization Model (QIVNOM) is structured as a multilayered system composed of edge-based vehicle nodes, fog computing inter- mediaries, and a centralized cloud coordinator . It integrates a quantum-inspired optimization algorithm that employs a probabilistic superposition of candidate solutions, iterati ve probability updates through interference principles, and en- tanglement modeling for correlated decision v ariables. This algorithm concurrently manages both network configurations and urban mobility control, achieving coordinated outcomes that consider latency , throughput, and energy constraints. The distributed architecture enables fog nodes to execute real- time, localized optimizations, while the cloud layer ov ersees the alignment of global strategies. QIVNOM is designed to efficiently explore high-dimensional decision spaces and con verge to ward near-optimal solutions within practical time bounds. The main contributions of this work are as follows: • Design of QIVNOM as an inte grated frame work for joint optimization of vehicular communication and urban decision making, operating in a distributed fog-cloud infrastructure. • De velopment of a quantum-inspired algorithm based on superposition-driv en probabilistic encoding and entangled variable modeling to enable efficient multi-objective op- timization. 3 • Implementation of proactive redundancy and adaptive routing strategies to maintain continuous V2X commu- nication and ensure system resilience under dynamic network and traffic conditions. E. Structure of the Article The remainder of this article is organized as follows. Section II details the architecture and components of the proposed Quantum-Inspired V ehicular Network Optimization Model. Section III presents the simulation setup, the core ev aluation parameters, and the comparativ e analysis against existing methods. Section IV provides an ablation study to examine the individual contributions of key system modules. Finally , Section V concludes the paper and outlines potential directions for future research. I I . P R O P O S E D A P P R O A C H : Q UA N T U M - I N S P I R E D V E H I C U L A R N E T W O R K O P T I M I Z A T I O N M O D E L The proposed QIVNOM introduces a nov el framew ork that integrates quantum-inspired optimization techniques with V ehicle-to-Everything (V2X) communication systems to im- prov e the ef ficiency and resilience of smart city infrastructures. This section provides an in-depth overvie w of the multilayered architecture, comprising vehicle, fog, and cloud layers, along with the novel approach of co-optimizing latency , fault toler- ance, and energy within V2X systems. A. W orkflow of QIVNOM The QIVNOM workflow begins with the acquisition of real-time data from vehicles and nearby fog nodes. V ehicles transmit dynamic telemetry , including current location, ve- locity , and proximity to obstacles. Fog nodes aggregate this information and perform preliminary analysis to assess traffic conditions and identify local safety risks. This layer supports immediate responses when required, such as initiating re- routing or issuing alerts to nearby vehicles in the event of hazards. Follo wing data aggregation, the fog layer executes low- latency preprocessing and manages localized traffic ev ents, such as congestion or collisions. Using quantum-inspired decision-making, the system optimizes regional parameters, such as signal timings and routing recommendations, through the use of probabilistic models. These models, guided by the quantum-inspired algorithm, support real-time decision- making to reduce latency and improv e communication reli- ability . In the final stage, the cloud layer performs global optimization by integrating processed insights from fog nodes into a comprehensiv e city-wide model. The quantum-inspired algorithm e valuates multiple system objectives, including traf- fic flow , resource distribution, and ener gy utilization. The resulting optimized strategies are then communicated back to the edge and fog layers for implementation across vehicles and infrastructure components. Algorithm 1: QIVNOM V ehicle-Layer Execution with Edge Sensing and Micro-Decisions Input : Neighborhood N t i , QoS targets, safety margins, and link metrics Output : Control u t i , message set { m t i → j } , of floading flag o t i Params: Gains K t i , G t ij , weights, deadlines, and budgets 1 for t = 0 , 1 , . . . , T − 1 do 2 Obtain measurement via 1b; predict and propagate the state using 1a; refine belief using 1c; 3 Form sparse message m t i → j using 2a; 4 if latency constraint 2b holds and link indicator 2c is true then 5 transmit to neighbors with success probability from 2d; 6 else 7 select alternativ e neighbor with highest 2d and defer transmission; 8 Update local queue using 3a; choose PHY/MAC profile via 3b; 9 Compute acti vation probabilities θ t ij using 3c; 10 Determine micro-action by CV aR policy 3d subject to safety certificate 3e; 11 Refine action via KKT stationarity 4a; 12 Update energy ledger with 4b; 13 Apply control and message feedback using 8a; 14 Update local selector ψ t i with 4c; inject neighborhood influence using 5a; 15 if trigger condition 7d holds then 16 collapse to e k ⋆ using 5b; update temperature via 5c; 17 Decide of floading o t i via 5d; compute end-to-end latency using 5e; 18 Allocate bandwidth share and compute link rate using 5f; 19 Set transmission priority weight via 6a; estimate packet success probability via 6b; 20 Update consensus state using 7a; verify contraction using 7b; 21 Ensure path robustness floor via 7c; 22 Check L yapunov decrement using 8b; if violation detected then 23 tighten safety margin in 3e and reduce step in 4c B. V ehicle Layer: Edge Sensing and Communication The v ehicle layer encodes edge sensing, V2V/V2I e xchange, and micro-decisions as a constrained stochastic-control pro- gram with quantum-inspired local selectors. The algorithm 1 operationalizes the edge pipeline by instantiating the sense- predict-update cycle through state propagation. x t +1 i = Φ t i x t i + Γ t i u t i + X j ∈N t i B t ij m t j → i + w t i (1a) 4 Fig. 1. The Proposed QIVNOM W orkflow . y t i = H t i x t i + n t i (1b) b t + i ∝ b t − i exp − 1 2 y t i − H t i ˆ x t i 2 ( R t i ) − 1 (1c) In 1a, x t i is the kinematic augmented state of vehicle i , u t i is the low level control, m t j → i is the message received from neighbor j , and w t i is the noise of the bounded process. In 1b, y t i is the fused measurement, H t i the sensing map, and n t i measurement noise. In 1c, b t ± i denote prior/posterior beliefs, ˆ x t i is the predictor , and R t i is the innov ation covariance. Next, we impose message sparsity 2a, latency feasibility 2b, link existence 2c, and probabilistic link use 2d. m t i → j = Π t ij S t i ˆ x t i , ∥ m t i → j ∥ 0 ≤ C t ij (2a) τ t ij = ℓ t ij r t ij + q t j µ t j ≤ ¯ τ ij (2b) A t ij = 1 { SNR t ij ≥ γ th ∧ d t ij ≤ d max } (2c) π t ij = Pr { A t ij = 1 | SNR t ij , d t ij } (2d) In 2a, S t i compresses features, Π t ij masks fields, and C t ij bounds sparsity . In 2b, ℓ t ij is payload length, r t ij the physical rate, q t j the service queue, µ t j the service rate, ¯ τ ij the deadline. In 2c, A t ij flags usable links via SNR threshold γ th and range d max . In 2d, π t ij quantifies link reliability . Local queue ev olu- tion 3a, schedule selection 3b, quantum-inspired acti vation 3c, risk-aware micro-policy 3d, and safety certificates 3e govern fast responses. q t +1 i = max { 0 , q t i − µ t i } + X j λ t j i (3a) r t ij = X ℓ σ t iℓ R ( ℓ ) ,t ij , σ t iℓ ∈ { 0 , 1 } , X ℓ σ t iℓ ≤ 1 (3b) θ t ij = | ψ t i ( j ) | 2 , X j θ t ij = 1 (3c) π t i = arg min a ∈A i CV aR α J i ( x t i , a, ξ t ) (3d) ˙ h i ( x t i , u t i ) + κ i h i ( x t i ) ≥ 0 (3e) In 3a, λ t j i is the arriv al rate. In 3b, σ t iℓ chooses one PHY/MAC profile ℓ with achiev able R ( ℓ ) ,t ij . Equation 3c maps the su- perposition vector ψ t i to link-use probabilities θ t ij . In 3d, J i is the episodic cost and ξ t exogenous randomness. In 3e, h i enforces forward inv ariance with gain κ i . Optimality , energy accounting, and wavefunction transport appear in 4a – 4c. ∇ a L i ( a, λ ) = ∇ a ˆ J i ( a )+ λ ∇ a g i ( a ) = 0 , λg i ( a ) = 0 , λ ≥ 0 (4a) e t +1 i = e t i + χ drive ∥ u t i ∥ 2 2 + χ comm X j r t ij (4b) ψ t +1 i = M t i ψ t i ∥ M t i ψ t i ∥ 2 , M t i = exp − η t ∇ ψ i ˜ J i ( ψ t i ) (4c) In 4a, ˆ J i is the surrogate stage cost and g i constraints with multiplier λ . In 4b, e t i is the energy ledger, with drive and communication coefficients χ drive , χ comm . In 4c, M t i is the update operator with stepsize η t . Neighborhood entanglement 5a, collapse trigger 5b, adaptiv e temperature 5c, offloading rule 5d, latency composition 5e, and capacity sharing 5f bind sensing to computation. ψ t + 1 2 i = ψ t i ⊙ Y j ∈N t i I + E t ij diag( ψ t j ) (5a) ψ t + i = e k ⋆ , k ⋆ = arg max k ψ t + 1 2 i,k when J t i − J t − 1 i ≥ η t i (5b) T t +1 i = β T t i + (1 − β ) v ar( J t − τ : t i ) 1 + v ar( J t − τ : t i ) (5c) o t i = 1 { L t loc ,i − L t fog ,i ≥ δ t i } (5d) L t i = (1 − o t i ) L t loc ,i + o t i L t upl ,i + L t proc ,i + L t down ,i (5e) 5 r t ij = α t i B log 2 1 + SINR t ij , X i α t i ≤ 1 (5f) In 5a, E t ij injects neighbor influence. In 5b, e k ⋆ is the one-hot selector when cost jump exceeds η t i . In 5c, T t i adapts to cost volatility with smoothing β . In 5d – 5e, o t i decides fog offload using latency components. In 5f, B is bandwidth and α t i the share. Priority and packet success are encoded by 6a and 6b. ω t i = α s s t i + α f f t i + α st stale t i , X i ω t i = 1 (6a) p t succ ,ij = 1 + exp {− ξ ( γ t ij − γ 0 ) } − 1 γ code (6b) In 6a, s t i is safety urgenc y , f t i fault risk, and stale t i data stal- eness. In 6b, γ t ij is SNR, γ 0 threshold, ξ steepness, and γ code coding gain. Consensus 7a, contraction 7b, path robustness 7c, and e vent trigger 7d coordinate group behavior . ξ t +1 i = ξ t i + X j ∈N t i w t ij ξ t j − ξ t i + η t i ˆ ξ t i − ξ t i (7a) X i ∥ ξ t +1 i − ¯ ξ t +1 ∥ 2 2 ≤ ρ X i ∥ ξ t i − ¯ ξ t ∥ 2 2 (7b) ρ t i = min p ∈P t i Y ( a,b ) ∈ p θ t ab , ρ t i ≥ ρ min (7c) ∆ J t i = J t i − J t − 1 i ≥ η t i ⇒ inv oke 5 b (7d) In 7a, w t ij are Metropolis weights and ˆ ξ t i is a local innovation. In 7b, ρ < 1 sets contraction. In 7c, ρ t i is minimum multi-hop success with floor ρ min . In 7d, cost spikes activ ate the collapse operator in 5b. Finally , the control map 8a and L yapunov decrement 8b close the loop. u t i = K t i x t i + X j ∈N t i G t ij m t j → i , ∥ u t i ∥ ∞ ≤ u max (8a) V t +1 i − V t i ≤ − λ i ∥ x t i ∥ 2 2 + χ ∥ w t i ∥ 2 2 (8b) In 8a, K t i and G t ij are state and message gains with bounded actuation u max . In 8b, V t i decreases by margin λ i under disturbance weight χ , ensuring vehicle-le vel stability under the full communication–control stack. C. F og Layer: Edge Computing and Localized Optimization Fog nodes condense heterogeneous vehicular data streams, ex ecute short-horizon optimizations, and pro vide early re- sponses within constrained latency and energy budgets. Ag- gregation, sketching, priv acy preserv ation, hazard scoring, rerouting, and dynamic compute–storage assignment are for- malized as coupled stochastic programs that interface directly with vehicle-le vel decisions and upstream cloud coordination. Sensed signals are aggregated in 9a, a nonlinear sketch is constructed in 9b, and calibrated noise is introduced in 9c to ensure privac y compliance. z t f = X i ∈N t f W t f i y t i + U t f ¯ y t f (9a) s t f = P t f tanh Ω t f z t f + b t f (9b) ˜ s t f = s t f + σ t f ε t f , ε t f ∼ N (0 , I ) (9c) In 9a, z t f denotes the fused vector at fog node f , where W t f i represents the adaptiv e weights assigned to vehicle measure- ments y t i , and U t f ¯ y t f encodes inputs from local roadside sensing infrastructure. In 9b, P t f and Ω t f are projection operators, b t f is a bias term, and tanh( · ) is applied to stabilize extreme values. In 9c, σ t f defines the pri vacy b udget, and ε t f denotes zero-mean Gaussian noise added for differential priv acy . Hazard intensity is computed in 10a, candidate detours are scored in 10b, the selected route is determined in 10c, and subchannel scheduling is addressed in 10d. r t f i = ln 1 + exp( α t f ∥ D t f i z t f ∥ 1 + β t f ) (10a) ρ t iℓ = w t 1 ˆ T t iℓ + w t 2 ˆ c t iℓ + w t 3 ˆ b t iℓ − 1 (10b) a t i = arg min ℓ ∈L t i ρ t iℓ s.t. r t f i ≤ τ t f (10c) R t f i → j = X u σ t f u R ( u ) ,t f i → j , X u σ t f u ≤ 1 , σ t f u ∈ { 0 , 1 } (10d) In 10a, r t f i is a smooth hazard score, α t f and β t f tune sensitivity , and D t f i extracts salient features. In 10b, ˆ T t iℓ is predicted trav el time, ˆ c t iℓ congestion, ˆ b t iℓ network bandwidth; w t 1 , w t 2 , w t 3 are normalized weights. In 10c, a t i picks a feasible detour under threshold τ t f . In 10d, σ t f u activ ates at most one subchannel u with achiev able rate R ( u ) ,t f i → j . Dynamic compute–storage allocation is posed via capacity-aware shares in 11a, cache fractions in 11b, a local objective in 11c, dual updates in 11d, and a proximal step in 11e. X k ∈T t f π t f k ≤ C cpu f , π t f k ≥ 0 (11a) X k ∈T t f κ t f k ≤ C mem f , 0 ≤ κ t f k ≤ 1 (11b) J t f = X k ∈T t f ω t k αL t f k + β E t f k + γ S t f k (11c) λ t +1 f = λ t f + η t f X k π t f k − C cpu f + (11d) Π t +1 f = pro x η t f R f Π t f − η t f ∇ Π L t f (11e) In 11a, π t f k is CPU share for task k , bounded by capacity C cpu f . In 11b, κ t f k is storage fraction with memory cap C mem f . In 11c, L t f k is latency , E t f k energy , and S t f k storage cost with positiv e weights α, β , γ and task priority ω t k . In 11d, λ t f is a nonnegati ve dual for CPU feasibility with step η t f . In 11e, Π t f stacks decision variables, R f is a conv ex regularizer , and L t f the augmented objectiv e. Queueing, delay bounds, cache reuse, energy budget, stability , and alert triggering are described by 12a, 12b, 12c, 12d, 12e, and 12f. Q t +1 f = max { 0 , Q t f + A t f − S t f } (12a) L t f i = Z t f i µ t f − Λ t f i + ∆ t f i , µ t f > Λ t f i (12b) 6 h t f k = 1 − exp − ν t f req t − τ : t f k (12c) E t +1 f = E t f + η cpu X k π t f k + η tx X i,j R t f i → j (12d) V t +1 f − V t f ≤ − λ f ∥ Q t f ∥ 2 2 + χ f ∥ A t f ∥ 2 2 (12e) ζ t f i = 1 { r t f i ≥ τ t f } (12f) In 12a, Q t f is the backlog, A t f arriv als, and S t f service. In 12b, L t f i is local delay for vehicle i , with service rate µ t f , load Λ t f i , residual term Z t f i , and processing overhead ∆ t f i . In 12c, h t f k is cache hit probability given request intensity req t − τ : t f k and reuse factor ν t f . In 12d, E t f tracks energy; η cpu and η tx weight compute and transmission. In 12e, V t f is a L yapunov function with margin λ f and disturbance weight χ f . In 12f, ζ t f i triggers local broadcasts when the score r t f i exceeds the threshold. Equations 9a – 9c feed hazard scoring 10a; the routing choice 10c uses the score from 10a and the metric in 10b; scheduled rates in 10d influence energy in 12d and backlog in 12a; allocations 11a – 11e control delay 12b, cache reuse 12c, and stability 12e; alerts in 12f close the local response loop. D. Cloud Layer: Global Coordination and Heavy Analytics The cloud layer consolidates summarized fog streams, learns long-horizon dynamics, and coordinates city-wide ac- tions through quantum-inspired parallel optimization with constraint-aware resource policies. Algorithm 2 operational- izes cloud-lev el aggregation, long-horizon forecasting, multi- objectiv e control, quantum-inspired population search, and entropic transport assignment, issuing deployments only when chance-constrained reliability and L yapunov stability condi- tions are satisfied. Global aggregation, forecasting, multi-objectiv e control, population-based exploration, and assignment to fog nodes are formalized, incorporating explicit stability and reliability surrogates. Fog-lev el summaries are fused in 13a, feature representations are lifted in 13b, and source confidence is scored in 13c. Z t = X f ∈F t A t f ˜ s t f (13a) Ξ t = Φ t σ G t Z t + b t (13b) ω t f = exp − κ 1 v ar( ˜ s t − τ : t f ) − κ 2 L t f P g exp − κ 1 v ar( ˜ s t − τ : t g ) − κ 2 L t g (13c) In 13a, A t f integrates the fog summary ˜ s t f into the global representation Z t . In 13b, σ ( · ) denotes a bounded activ ation function, with Φ t , G t , and b t as learned parameters. In 13c, ω t f assigns a weight to fog node f based on its variance window and latency L t f . A city-le vel state model is adopted in 14a, with corresponding observations defined in 14b. X t +1 = F t X t + U t + X f H t f ˜ s t f + ε t (14a) Y t = C t X t + v t (14b) Algorithm 2: QIVNOM Cloud-Layer Global Coordi- nation and Heavy Analytics Input : Fog summaries { ˜ s t f } f ∈F t , risk level δ , horizons H , W , marginals ( µ, ν ) Output : Global plan index k ⋆ , assignment Π ⋆ , updated ( X t , Θ t ) Params: Stepsizes ( η x , η λ , η t , η p ) , smoothing β , ρ , penalties ( λ, ε ) 1 for t = 0 , 1 , . . . , T − 1 do 2 Compute Z t using 13a; compute Ξ t using 13b; compute confidences { ω t f } using 13c; 3 for each f ∈ F t do 4 reweight ˜ s t f ← ω t f ˜ s t f 5 Update X t +1 using 14a; compute observation Y t and residual with 14b; 6 Update predictor K t +1 using 15a; 7 Form loss J t (Θ) using 15b; update Θ t +1 using 15c; update second moment M t +1 using 15d; 8 Compute J t city using 16a; build L ( · ) using 16b; update ( X t +1 , λ t +1 ) using 16c; 9 Update population P t +1 using 17a; update temperature T t +1 using 17b; 10 Form soft plan { π t k } and pick k ⋆ using 17c; 11 Solve Π ⋆ using 18a; 12 if chance constraint 18b holds and Lyapunov condition 18c holds then 13 dispatch plan k ⋆ with assignment Π ⋆ ; continue; 14 else // Adaptive repair: adjust trade-offs and search temperature 15 Update weights w t q ← adjust( w t q ) ; tighten risk lev el δ ← shrink( δ ) ; modify η p , ε and repeat population and OT steps; In 14a, X t represents the global system state, U t serves as the control proxy , H t f incorporates signals from fog nodes, and ε t denotes the process noise. In 14b, Y t is the observable output, perturbed by measurement noise v t . A lifted predictor is estimated in 15a, a horizon-based loss is defined in 15b, parameters are updated in 15c, and second moments are adapted in 15d. K t +1 = t − 1 X τ = t − W Ξ τ +1 Ξ τ ⊤ t − 1 X τ = t − W Ξ τ Ξ τ ⊤ + λI − 1 (15a) J t (Θ) = H X h =1 α h Y t + h − ˆ Y t + h (Θ) 2 2 + β ∥ Θ ∥ 1 + γ ∥ Θ ∥ 2 F (15b) Θ t +1 = pro x η t β ∥·∥ 1 Θ t − η t ∇ Θ J t (Θ t ) (15c) M t +1 = ρM t + (1 − ρ ) ∇ Θ J t (Θ t ) ⊙ ∇ Θ J t (Θ t ) (15d) In 15a, K t +1 advances the lifted features using T ikhonov regularization parameter λ . In 15b, Θ denotes the collection 7 of model weights, α h represents horizon-specific weights, and β , γ regulate sparsity and magnitude. In 15c, η t defines the stepsize used in conjunction with proximal shrinkage. In 15d, M t maintains a moving average of squared gradients with decay factor ρ . A scalar policy is constructed from vector - valued costs in 16a, a Lagrangian formulation is introduced in 16b, and primal–dual updates are executed in 16c. J t city = X q ∈Q w t q C t q ( X t , U t ) (16a) L ( X t , U t , λ t ) = J t city + λ t ⊤ g ( X t , U t ) ( λ t ≥ 0) (16b) X t +1 = Π X X t − η x ∇ X J t city + ∇ X g ⊤ λ t , λ t +1 = λ t + η λ g ( X t , U t ) + (16c) In 16a, C t q represents latency , reliability , energy , and equity costs, each weighted by w t q . In 16b, g ( · ) denotes the stacked inequality constraints. In 16c, Π X performs projection onto the feasible set, with update steps η x and η λ . A candidate population is e volv ed in 17a, temperature is adapted in 17b, and a plan is sampled in 17c. P t +1 = exp − η p H t P t 1 ⊤ exp − η p H t P t 1 (17a) T t +1 = β T t + (1 − β ) v ar J t − τ : t city (17b) π t k = exp − h t k /T t P u exp − h t u /T t , k ⋆ = arg max k π t k (17c) In 17a, P t represents the mixture distribution over K can- didate solutions, governed by the cost operator H t = diag( h t 1 , . . . , h t K ) . In 17b, the temperature T t adapts accord- ing to cost volatility using smoothing parameter β . In 17c, π t k denotes the soft selection probability , and k ⋆ indicates the selected plan. Global plans are assigned to fog nodes using entropic transport in 18a, chance-constrained reliability is enforced in 18b, and bounded state drift is maintained via a L yapunov constraint in 18c. Π ⋆ = arg min Π ∈ R F × K + X f ,k Π f k D f k + ε X f ,k Π f k log Π f k s.t. Π 1 = µ, Π ⊤ 1 = ν. (18a) ¯ g ( X t , U t ) + q 2 V ar g ( X t , U t ) ln(1 /δ ) ≤ 0 (18b) E V ( X t +1 ) − V ( X t ) | X t ≤ − κ ∥ X t ∥ 2 2 + c (18c) In 18a, Π ⋆ assigns K plan atoms to F fog nodes under costs D f k with marginals µ, ν and regularizer ε . In 18b, δ sets the risk lev el using a square-root variance bound. In 18c, V ( · ) ensures negati ve drift with margin κ and slack c . Algorithm 3: Quantum-Inspired Optimization for Joint Routing–T raffic Control (QIVNOM Core) Input : Aggregates Z 0 , cost weights { w q } , feasibility set F , horizon T Output : Final amplitudes ψ ( T ) , plan distribution { π ( T ) k } , selected plan k ⋆ Params: Stepsizes η t , temperature smoothing β , penalties ρ , tolerances ( ε E , ε I ) 1 Compute ψ (0) using 19a; enforce normalization via 19b; set p (0) k with 19c; 2 for t = 0 , 1 , . . . , T − 1 do 3 Form joint amplitudes via 20a; compute marginals with 20b and 20c; 4 Assemble cost vector using 21a; build penalized operator with 21b; ev aluate energy by 21c and gradient via 21d; 5 Set direction using 22a; take step with 22b; renormalize using 22c; 6 Update temperature with 23a; compute soft policy { π ( t ) k } using 23b; sample provisional plan k ⋆ ; 7 Evaluate coupling I ( t ) by 24a; compute gradients 24b and 24c; adjust ψ ( t ) c , ψ ( t ) m accordingly; 8 Update scalarization via 25a; project onto S K − 1 ∩ F using 25b; 9 Check descent certificate 26a; 10 if E ( t +1) − E ( t ) ≤ ε E and I ( t ) ≤ ε I then 11 break; 12 else 13 if violation of 26a then 14 η t ← 0 . 5 η t ; increase ρ in 21b E. Quantum-Inspired Optimization Algorithm This subsection formulates city-scale joint routing and traf- fic control as a quantum-inspired search ov er entangled plans defined on a probability sphere. The formulation incorporates projected gradient dynamics, annealed sampling, and coupling mechanisms that synchronize communication and mobility decisions. Initialization procedures, entanglement modeling, energy shaping functions, interference-based update rules, annealing schedules, feasibility projection methods, and stabil- ity guarantees are formally specified. Algorithm 3 integrates initialization 19a, joint encoding 20a, energy shaping 21b, spherical update 22c, annealed selection 23b, scalarization 25a, feasibility projection 25b, and the descent certificate 26a into a single loop for coordinated vehicular routing and traffic management. A normalized superposition is initialized in 19a, with prob- ability mass constraints enforced in 19b, and the associated sampling map defined in 19c. ψ (0) = σ W 0 Z 0 + b 0 σ W 0 Z 0 + b 0 2 (19a) 8 K X k =1 ψ (0) k 2 = 1 (19b) p (0) k = ψ (0) k 2 , k = 1 , . . . , K (19c) In 19a, Z 0 denotes the cloud-aggregated feature (as defined in 13a), with W 0 and b 0 as learnable parameters, and σ ( · ) rep- resenting a bounded activ ation function. Equation 19b applies normalization to ψ (0) , while 19c specifies the initial sampling weights. Communication and mobility plan amplitudes are encoded in 20a, with corresponding marginals deri ved in 20b – 20c. Υ ( t ) k,ℓ = ψ ( t ) c ( k ) ψ ( t ) m ( ℓ ) (20a) θ ( t ) c ( k ) = X ℓ Υ ( t ) k,ℓ 2 (20b) θ ( t ) m ( ℓ ) = X k Υ ( t ) k,ℓ 2 (20c) In 20a, ψ ( t ) c represents communication path patterns, while ψ ( t ) m corresponds to signal and traffic flow patterns. Equations 20b – 20c compute the marginal probabilities of these plans. Objectiv e components are assembled in 21a, constraint penal- ties are incorporated in 21b, expected energy is e valuated in 21c, and its gradient is computed in 21d. h ( t ) = X q ∈{ L,R,E ,T h } w ( t ) q c ( t ) q ∈ R K (21a) ˜ H ( t ) = diag h ( t ) + ρ diag max { 0 , G ( t ) } 2 (21b) E ( t ) = ψ ( t ) ⊤ ˜ H ( t ) ψ ( t ) (21c) ∇ ψ E ( t ) = 2 ˜ H ( t ) ψ ( t ) (21d) In 21a, c ( t ) q denotes latency ( L ), reliability ( R ), energy ( E ), and throughput ( T h ) costs, each weighted by time-v arying factors w ( t ) q . Equation 21b incorporates constraint residuals G ( t ) . Equations 21c – 21d define the energy function and its corresponding gradient. A descent direction is computed in 22a, a step is applied in 22b, and normalization on the probability sphere is enforced in 22c. d ( t ) = −∇ ψ E ( t ) + λ ( t ) ψ ( t ) (22a) ˆ ψ ( t +1) = ψ ( t ) + η t d ( t ) (22b) ψ ( t +1) = ˆ ψ ( t +1) ˆ ψ ( t +1) 2 (22c) In 22a, λ ( t ) preserves normalization. Equation 22b applies a step using stepsize η t , and 22c restores the unit norm. T emperature adaptation is defined in 23a, and a soft policy distribution is constructed in 23b. T ( t +1) = β T ( t ) + (1 − β ) v ar E t − τ : t (23a) π ( t ) k = exp − h ( t ) k /T ( t ) P u exp − h ( t ) u /T ( t ) (23b) In 23a, β ∈ (0 , 1) regulates volatility through smoothing, while 23b defines the sampling distribution over candidate solutions. Coupling is quantified in 24a, and gradients in 24b–24c are used to align marginal distributions. I ( t ) = X k,ℓ Υ ( t ) k,ℓ 2 log Υ ( t ) k,ℓ 2 θ ( t ) c ( k ) θ ( t ) m ( ℓ ) (24a) g ( t ) c ( k ) = ∂ I ( t ) ∂ ψ ( t ) c ( k ) (24b) g ( t ) m ( ℓ ) = ∂ I ( t ) ∂ ψ ( t ) m ( ℓ ) (24c) In 24a, I ( t ) penalizes mismatched coupling, while 24b–24c guide ψ ( t ) c and ψ ( t ) m tow ard coherent joint assignments. A Tchebycheff scalarization is applied in 25a, and projection onto the feasible set is performed in 25b. φ ( t ) = min α ∈ R 4 + max q α q C ( t ) q − C ⋆ q s.t. X q α q = 1 (25a) ψ ( t +1) ← P S K − 1 ∩F ψ ( t +1) (25b) In 25a, C ⋆ q denotes utopia reference points, and α represents a weight vector . Equation 25b projects onto the intersection of the unit sphere and the feasibility set F , which includes ca- pacity , timing, and safety constraints. Energy drift is bounded in 26a. E ( t +1) − E ( t ) ≤ − η t ∇ ψ E ( t ) 2 2 + η 2 t L E ∇ ψ E ( t ) 2 2 (26a) In 26a, L E bounds the local smoothness of E ( t ) , ensuring descent for sufficiently small η t . Equations 19a – 19c define the start point; entanglement is encoded by 20a – 20c; objective shaping follows 21a – 21d; interference-style updates are set by 22a – 22c; annealing and sampling are governed by 23a–23b; coupling alignment uses 24a – 24c; multi-objecti ve feasibility uses 25a – 25b; stability is certified by 26a. I I I . S I M U L A T I O N A N D E V A L UATI O N Simulations used SUMO for microscopic traffic and OM- NeT++/V eins for V2X networking, with a Python/PyT orch backend executing QIVNOM (PBQEI [11], VQAM [19], QDCNN [12], QISC [13], QIDEF [18], QIRNM [14], R UMP [20], SMC [17], U ADM [15]). A GPU-enabled node hosted training/inference, while fog services ran as Dockerized mi- croservices via T raCI. The public METR-LA dataset (traf fic speeds, Los Angeles) calibrated OD demand and congestion priors, and a 5 km × 5 km OpenStreetMap road graph anchored topology . IEEE 802.11p and 5G NR sidelink stacks were mod- eled with realistic PHY/MA C. Core settings are summarized in T able II. A. End-to-End Latency End-to-end delay is measured from packet generation to deliv ery (queuing, MA C access, transmission, processing, callbacks), av eraged ov er successful deliv eries using METR- LA–calibrated SUMO–OMNeT++/V eins. Scenarios: S1 off- peak 11p; S2 rush mixed 11p/NR SL; S3 incidents; S4 20% RSU outage; S5 20 Hz beacons/double payload; S6 fog CPU 50%. QIVNOM reduces end-to-end delay under nominal 9 T ABLE II S I M U L A T I O N S E T U P A N D H Y P E R PA R A M E T E R S . Parameter V alue T raffic Simulator SUMO (TraCI interface) Network Simulator OMNeT++ + V eins Radio Stack IEEE 802.11p (10 MHz), 5G NR SL (20 MHz) Road T opology OpenStreetMap, Los Angeles (5 km × 5 km) Public Dataset METR-LA (5-min speed, 207 sensors) Simulation Duration 3600 s T ime Step T raffic: 1 s; Network: 0.1 s V ehicles (peak) 2000 Roadside Units (RSUs) 40 Fog Nodes 12 (co-located with RSU clusters) Beaconing & Packets 10 Hz beacons; 256 B payloads Latency Budgets V2V : 50 ms; V2I: 80 ms QIVNOM Population K 128 Annealing Smoothing β 0.9 Step Size η t 1 × 10 − 2 Entropic Regularizer ε 1 × 10 − 2 Risk Level δ 1 × 10 − 3 Multi-Objectiv e W eights ( w L , w R , w E , w T h ) (0.4, 0.3, 0.2, 0.1) Hardware 32-core CPU, 256 GB RAM, 1 × A100 40GB GPU Containerization Dockerized fog services conditions. In S1, it attains 38 ms, whereas PBQEI, VQAM, and QIDEF report 46 ms, 52 ms, and 49 ms, respecti vely; the gap to the best baseline (PBQEI) is 17 . 4% . Under S2 rush- hour density , QIVNOM records 54 ms; PBQEI and QIDEF reach 68 ms and 69 ms, while SMC and U ADM climb to 92 ms and 95 ms. The reduction versus the best baseline is 20 . 6% , indicating stable scheduling and fast local rerouting. Full results for all baselines appear in Figure 2. W ith disruptions, QIVNOM sustains lower delay . In S3 (incidents), QIVNOM is 62 ms; the strongest baseline is QIDEF at 79 ms, followed by PBQEI at 81 ms and VQAM at 88 ms—yielding a 21 . 5% cut against the top baseline. In S4 (RSU outage), QIVNOM reaches 67 ms versus 86 ms for QIDEF and 90 ms for PBQEI; R UMP and SMC e xceed 118 ms and 123 ms. The improvement against the best baseline is 22 . 1% , reflecting fault-tolerant activ ation and route selection. Under stress on the wireless and compute planes, QIVNOM remains consistent. In S5 (beacon load), QIVNOM achiev es 59 ms; the best baseline, QIDEF , stands at 72 ms (gain 18 . 1% ). In S6 (fog contention), QIVNOM reports 64 ms versus 80 ms for QIDEF and 84 ms for PBQEI; RUMP and SMC exceed 108 ms and 113 ms. A veraged over all scenarios, the reduction relativ e to the strongest competing method is approximately 20 . 0% . B. P ack et Delivery Ratio (PDR) PDR is the ratio of deliv ered packets to total transmis- sions across V2V/V2I, accounting for retransmissions. Using METR-LA–calibrated SUMO/OMNeT++ with IEEE 802.11p and NR sidelink, tests cov er: S1 off-peak 11p; S2 rush mixed; Fig. 2. End-to-end latency (ms) across scenarios using METR-LA–calibrated simulations. Lower is better. S3 incidents; S4 20% RSU outage; S5 20 Hz/double payload; S6 fog CPU 50%. QIVNOM improves PDR across nominal traffic and mixed-radio settings (Figure 3). In S1, QIVNOM reaches 99.1%, ahead of PBQEI at 97.8%, VQAM at 96.5%, and QIDEF at 98.2%—an absolute g ain of +0.9 points o ver the best baseline. Under S2 rush-hour density , QIVNOM attains 97.2% while QIDEF and PBQEI score 95.1% and 94.6%; R UMP and U ADM are 91.0% and 90.2%. Gains here are +2.1 points versus the best baseline. Under incident-induced turbulence, QIVNOM sustains de- liv ery . In S3, it achieves 96.1%; QIDEF and PBQEI reach 93.8% and 93.2%, with QIRNM and VQAM at 92.6% and 92.1%. The advantage is +2.3 points. In S4 with a 20% RSU outage, QIVNOM records 95.4%; the next best, QIDEF , is 92.1%, follo wed by PBQEI at 91.0% and SMC at 88.7%. The margin expands to +3.3 points, showing ef fecti ve mesh fallback and priority-aware routing. Stress on control planes remains manageable. In S5 (beacon load), QIVNOM secures 96.5%, with QIDEF at 93.9% and PBQEI at 93.1%, an advantage of +2.6 points. In S6 (fog contention), QIVNOM achiev es 96.0%, whereas QIDEF and PBQEI clock 93.5% and 92.7%; SMC and R UMP fall to 88.1% and 89.0%. A veraged across scenarios, QIVNOM deliv ers 96.7%, exceeding the scenario-wise best baseline average (94.4%) by +2.3 points. C. Network Reliability Reliability is the fraction of time an end-to-end path meets latency/rate SLOs under failures, computed with METR- LA–calibrated SUMO–OMNeT++/V eins covering V2V/V2I, RSU backhaul, fog–cloud loops. Scenarios: S1 5% links; S2 10 Fig. 3. Packet Deliv ery Ratio (%) across scenarios using METR- LA–calibrated simulations. Higher is better. 20% RSUs; S3 30%/min churn; S4 urban canyon; S5 four RSUs down; S6 30% backhaul loss. Under nominal faults, QIVNOM maintains higher connectivity (Figure 4). In S1, QIVNOM reaches 99.0%, exceeding the best baseline, QIDEF at 97.8%, by +1.2 points; PBQEI and VQAM post 97.3% and 96.2%. With S2 RSU outages, QIVNOM deliv ers 96.8%; QIDEF and PBQEI score 94.1% and 93.6%, while RUMP and SMC drop to 89.7% and 89.1%. The improvement over the best baseline is +2.7 points. Under strong dynamics, reliability stays high. In S3, QIVNOM attains 97.2% versus 95.0% (QIDEF) and 94.5% (PBQEI), an advantage of +2.2 points; VQAM and QIRNM are 93.6% and 93.9%. For S4 urban canyon, QIVNOM achiev es 95.9% and the best baseline, QIDEF , is 93.0%; PBQEI and VQAM reach 92.2% and 91.1%. The margin is +2.9 points, reflecting resilient re-routing and redundancy under blockage. Clustered and control-plane failures are more taxing b ut remain manageable. In S5, QIVNOM records 95.1% while QIDEF and PBQEI score 92.4% and 91.7%, a +2.7-point edge. In S6, QIVNOM reaches 96.2% versus 93.8% (QIDEF) and 93.1% (PBQEI); R UMP and SMC fall to 89.5% and 89.0%. A veraged across scenarios, QIVNOM achieves 96.7%, outperforming the scenario-wise best baseline a verage (94.3%) by +2.4 points. D. T raffic Flow Efficiency T raffic flow efficienc y is assessed using A verage T ravel T ime (minutes per trip) and Network Congestion Index (per- cent edges with v /c ≥ 0 . 85 ) ov er METR-LA–calibrated SUMO–OMNeT++/V eins. Scenarios: S1 of f-peak; S2 rush Fig. 4. Network reliability (%) under failure scenarios with METR- LA–calibrated simulations. mixed radios; S3 incidents; S4 corridor closures; S5 +25% de- mand; S6 halved advisory frequency . Under nominal and peak loads, QIVNOM reduces A TT while lowering NCI (Figure 5). In S1, A TT is 7.8 min versus 8.7 (QIDEF), 8.9 (PBQEI), and 9.4 (VQAM), a 10.3% cut against the best baseline. NCI is 14% against 17% (QIDEF) and 18% (PBQEI). In S2, QIVNOM attains 11.5 min while PBQEI and QIDEF record 13.3 and 13.7 min; NCI drops to 28% from 33% (QIDEF) and 35% (PBQEI). The relativ e gains reach 13.5% (A TT) and 15.2% (NCI) over the strongest baseline. In case of disruptions, travel efficiency remains stable. In S3, QIVNOM achiev es 12.2 min and 31% NCI, whereas QIDEF posts 13.9 min and 35%, and PBQEI 14.2 min and 39%; improvements are 12.2% and 11.4%. For S4, QIVNOM yields 12.8 min with 33% NCI, beating QIDEF at 14.5 min and 37%, PBQEI at 15.0 min and 41%, and VQAM at 15.9 min and 43%. Stress on demand and edge compute remain manageable. In S5, QIVNOM records 13.4 min and 35% NCI, improving QIDEF (14.8 min, 39%) and PBQEI (15.5 min, 43%) by 9.5% and 10.3%. In S6, A TT is 12.6 min and NCI 32%; the best baseline (QIDEF) reaches 14.2 min and 36%, while PBQEI shows 14.6 min and 40%. Using all scenarios, QIVNOM reduces A TT by 11–13% and NCI by 10–12% relative to the best scenario-wise baseline (see T able 1). I V . A B L AT I O N A N A L Y S I S The QIVNOM framew ork is decomposed into its core components to quantify their individual contributions un- der METR-LA–calibrated simulations. Full QIVNOM at- tains 57.3 ms, 96.7%, and 96.7%. Removing entangle- ment (+ --Entangle ) raises latency to 62.8 ms and low- 11 Fig. 5. A verage Trav el Time (minutes) across scenarios with METR- LA–calibrated simulations (Lower is better) Fig. 6. Network Congestion Index (NCI, % edges with v/c ≥ 0 . 85 ) - Lower is better ers PDR/reliability to 95.2%/95.1% ( +5.5 ms; − 1 . 5 / − 1 . 6 pts). Fixed temperature (+ --Anneal ) yields 61.0 ms and 95.6%/95.7%. Disabling feasibility projection (+ --Proj ) is most harmful: 63.5 ms and 94.8%/94.9%. Hyperparameter T ABLE III A B L A T I O N S T U DY R E S U LT S O V E R S 1 – S 6 . M E T R I C S : L ATE N C Y ( M S ) , P AC K E T D E L I V E RY R A T I O ( P D R , % ) , R E L I A B I L I T Y ( % ) , A V E R AG E T R A V E L T I M E ( A T T, M I N ) , N E T W O R K C O N G E S T I O N I N D E X ( N C I , % ) . V ariant Latency PDR Rel. A TT NCI (A) Core Module Ablation Full QIVNOM 57.3 96.7 96.7 11.7 28.8 + --Entangle (no coupling) 62.8 95.2 95.1 12.5 32.0 + --Anneal (fixed T ) 61.0 95.6 95.7 12.3 31.1 + --Proj (no feasibility projection) 63.5 94.8 94.9 12.7 33.0 + --CVaR (risk- neutral) 60.7 95.7 95.6 12.1 30.5 + --OT (greedy assignment) 60.9 95.9 95.5 12.2 31.2 (B) Hyperparameter Sensitivity Baseline ( K =128 , β =0 . 9 , δ =10 − 3 ) 57.3 96.7 – – – K =64 59.1 96.2 – – – K =256 56.8 96.9 – – – β =0 . 7 58.2 96.3 – – – β =0 . 98 57.6 96.6 – – – δ =10 − 2 58.5 96.1 – – – (C) T raffic Efficiency Impact (A TT [min], NCI [%]) Full QIVNOM – – – 11.7 28.8 + --Entangle (no coupling) – – – 12.5 32.0 + --Anneal (fixed T ) – – – 12.3 31.1 + --Proj (no feasibility projection) – – – 12.7 33.0 + --CVaR (risk- neutral) – – – 12.1 30.5 + --OT (greedy assignment) – – – 12.2 31.2 sensitivity sho ws stable performance near the chosen operating point. Reducing population size from K =128 to K =64 in- creases latency to 59.1 ms and trims PDR to 96.2% ( +1.8 ms; − 0 . 5 pts). Increasing to K =256 mildly improves latency to 56.8 ms and PDR to 96.9% ( –0.5 ms; +0.2 pts), with higher compute cost. T emperature smoothing β =0 . 7 or 0 . 98 de grades to 58.2 ms/96.3% and 57.6 ms/96.6%, respectively , confirming β =0 . 9 balances exploration and stability . A looser risk lev el δ =10 − 2 raises latency to 58.5 ms and trims PDR to 96.1%. T raffic efficienc y effects are summarized in T able III. Full QIVNOM averages 11.7 min A TT and 28.8% NCI. Removing entanglement lifts A TT to 12.5 min and NCI to 32.0% (+0.8 min; +3.2 pts). Fixed temperature reaches 12.3 min/31.1%, while disabling feasibility projection yields 12.7 min/33.0% (largest congestion penalty). Dropping CV aR micro-policy nudges A TT/NCI to 12.1 min/30.5%. Greedy assignment (no OT) results in 12.2 min/31.2%. 12 V . C O N C L U S I O N W e presented QIVNOM , a quantum-inspired framework that jointly optimizes V2V/V2I communications and urban traffic control on commodity edge-cloud infrastructure. Using sphere-projected gradient updates over probabilistic plan rep- resentations with an entanglement-style coupling and Tcheby- cheff scalarization (with feasibility projection), QIVNOM en- forces latency/reliability targets while remaining robust via chance constraints and L yapunov drift control. In METR-LA– calibrated SUMO–OMNeT++/V eins simulations on a 5 × 5 km map with IEEE 802.11p and 5G NR sidelink, QIVNOM reduces mean end-to-end latency to 57.3 ms ( ≈ 20% below the best baseline) and sustains advantages under stress (62 ms vs 79 ms during incidents; 67 ms vs 86 ms with RSU outages); packet deliv ery and overall reliability average 96.7%, and corridor-closure trav el metrics improv e (A TT 12.8 min/33% vs 14.5 min/37%). These results show that co-optimizing commu- nication and mobility yields tangible QoS and traffic gains, making QIVNOM a practical building block for smart-city ITS and connected consumer electronics. Future work will transition to city pilots with real traces and mixed autonomy , reporting runtime/energy breakdowns, broadening the threat model, and exploring hardware acceleration. A C K N O W L E D G M E N T This work was supported by Princess Nourah bint Ab- dulrahman Univ ersity Researchers Supporting Project Num- ber (PNURSP2025R409), Princess Nourah bint Abdulrahman Univ ersity , Riyadh, Saudi Arabia. R E F E R E N C E S [1] T . Ji, P . Cheng, K. Li, Z. Cao, Z. Duan, and C. L yu, “ Adaptiv e traffic signal control for energy efficienc y using deep learning and consumer electronics, ” IEEE T ransactions on Consumer Electr onics , vol. 71, no. 2, pp. 4692–4698, 2025. [2] N. K. Singh, S. Patni, S. Lim, and J. Lee, “Federated learning-based secure computing mechanism for consumer internet of vehicles-based transportation cyber-physical systems, ” IEEE T ransactions on Consumer Electr onics , vol. 71, no. 2, pp. 4867–4882, 2025. [3] A. Mohanty , A. G. Mohapatra, S. Kumar Mohanty , T . Y ang, R. Singh Rathore, A. Alkhayyat, and D. Gupta, “Integrating cognitive intelligence and vanet for effecti ve traffic congestion detection in smart urban mobility , ” IEEE Access , vol. 13, pp. 61 538–61 548, 2025. [4] O. Jos ´ e Salcedo Parra, L. Correa S ´ anchez, and J. G ´ omez, “The evolution of vanet: A revie w of emerging trends in artificial intelligence and software-defined networks, ” IEEE Access , vol. 13, pp. 49 187–49 213, 2025. [5] H. Jang, Y . Goh, M. Joo, and J.-M. Chung, “Smartphone authentication technology enhancement for advanced smart contract application secu- rity , ” IEEE T ransactions on Consumer Electronics , vol. 71, no. 2, pp. 2666–2674, 2025. [6] N. Sharma, U. Agarwal, K. Singh, P . Chanak, and O. J. Pande y , “Energy- aware and qos-enhanced routing with node fault prediction for consumer iot networks using ml frameworks, ” IEEE T ransactions on Consumer Electr onics , vol. 71, no. 2, pp. 2421–2438, 2025. [7] A. Manasrah, Q. Y aseen, H. Al-Aqrabi, and L. Liu, “Identity-based authentication in vanets: A revie w , ” IEEE T ransactions on Intelligent T ransportation Systems , vol. 26, no. 4, pp. 4260–4282, 2025. [8] N. Hameed Hussein, J. Siaw Paw Koh, C. T . Y aw , S. Kiong Tiong, F . Benedict, T . Y usaf, K. Kadirgama, and T . Chung Hong, “Sdn-based vanet routing: A comprehensive survey on architectures, protocols, analysis, and future challenges, ” IEEE Access , vol. 13, pp. 126 801– 126 861, 2025. [9] H. Guan, Q. Bai, and Q. Meng, “ A decentralized signal-free intersection control framew ork for connected and autonomous vehicles, ” IEEE T ransactions on Consumer Electr onics , vol. 71, no. 2, pp. 6193–6200, 2025. [10] H. Byeon, M. Alsaadi, A. Quraishi, A. AlGhamdi, T . A. Ahanger, I. Keshta, P . A. Xaliko vich, M. Soni, and M. W . Bhatt, “Consumer technology in task offloading and edge resource allocation: Aiot and edge computing for ne xt-generation communication, ” IEEE T ransactions on Consumer Electr onics , vol. 71, no. 2, pp. 5356–5365, 2025. [11] D. Zhang, W . Shi, and M. St-Hilaire, “The permissioned blockchain- based quantum-inspired edge intelligence approach for the services of future internet of vehicles, ” IEEE T ransactions on Intelligent T ransporta- tion Systems , vol. 26, no. 5, pp. 6171–6185, 2025. [12] A. Meghanath, S. Das, B. K. Behera, M. A. Khan, S. Al-Kuwari, and A. Farouk, “Qdcnn: Quantum deep learning for enhancing safety and reliability in autonomous transportation systems, ” IEEE T ransactions on Intelligent T ransportation Systems , pp. 1–11, 2025. [13] Q. Li, Z. Huang, W . Jiang, Z. T ang, and M. Song, “Quantum algorithms using infeasible solution constraints for collision-avoidance route plan- ning, ” IEEE T ransactions on Consumer Electr onics , vol. 71, no. 1, pp. 2186–2201, 2025. [14] S. Zhang, X. Zhou, T . Qiu, and D. O. W u, “Quantum-inspired robust networking model with multiverse co-evolution for scale-free iot, ” IEEE T ransactions on Mobile Computing , vol. 23, no. 12, pp. 14 085–14 098, 2024. [15] X. T ang, G. Zhong, S. Li, K. Y ang, K. Shu, D. Cao, and X. Lin, “Uncertainty-aware decision-making for autonomous driving at uncon- trolled intersections, ” IEEE T ransactions on Intelligent T ransportation Systems , vol. 24, no. 9, pp. 9725–9735, 2023. [16] L. Belcastro, F . Marozzo, A. Orsino, D. T alia, and P . Trunfio, “Edge- cloud continuum solutions for urban mobility prediction and planning, ” IEEE Access , vol. 11, pp. 38 864–38 874, 2023. [17] H. Xu, A. Berres, S. B. Y oginath, H. Sorensen, P . J. Nugent, J. Severino, S. A. T ennille, A. Moore, W . Jones, and J. Sanyal, “Smart mobility in the cloud: Enabling real-time situational awareness and cyber -physical control through a digital twin for traffic, ” IEEE Tr ansactions on Intelli- gent T ransportation Systems , vol. 24, no. 3, pp. 3145–3156, 2023. [18] B. Bandyopadhyay , P . Kuila, M. Bey , and M. C. Govil, “Quantum- inspired differential e volution for freshness-aware caching-aided of fload- ing in digital twin-enabled internet of vehicles, ” IEEE T ransactions on Intelligent V ehicles , vol. 9, no. 12, pp. 7646–7659, 2024. [19] A. Marchesin, B. Montrucchio, M. Graziano, A. Boella, and G. Mondo, “Improving urban traffic mobility via a versatile quantum annealing model, ” IEEE T ransactions on Quantum Engineering , vol. 4, pp. 1–13, 2023. [20] J. Cheng, K. Li, Y . Liang, L. Sun, J. Y an, and Y . Wu, “Rethinking urban mobility prediction: A multiv ariate time series forecasting approach, ” IEEE T ransactions on Intelligent Tr ansportation Systems , vol. 26, no. 2, pp. 2543–2557, 2025. [21] G. Zhang and Z. W u, “Intelligent decision support systems for energy- efficient autonomous systems in consumer electronics, ” IEEE T ransac- tions on Consumer Electr onics , vol. 71, no. 2, pp. 4714–4720, 2025. [22] D. Huang, Y . Na, Y . Liu, Z. Zhang, and B. Mi, “Overview of cooperativ e fault-tolerant control driven by the full information chain of intelligent connected vehicle platoons under the zero-trust framework: Opportuni- ties and challenges, ” IEEE Intelligent Tr ansportation Systems Magazine , vol. 16, no. 1, pp. 22–39, 2024. [23] W . Ding, C. Xu, M. Arief, H. Lin, B. Li, and D. Zhao, “ A survey on safety-critical driving scenario generation—a methodological perspec- tiv e, ” IEEE T ransactions on Intelligent T ransportation Systems , vol. 24, no. 7, pp. 6971–6988, 2023. [24] S. Saqib Jamal, A. Muhammad, and W .-C. Song, “Intelligent qv2x routing for traffic management in consumer iov using stgnn and re- inforcement learning, ” IEEE T ransactions on Consumer Electr onics , vol. 71, no. 1, pp. 1288–1297, 2025. [25] F . Y ang, T . Y u, S. Zhang, S. Garg, and M. Alrashoud, “Split learning- based robust resource allocation for consumer electronics in smart cities, ” IEEE T ransactions on Consumer Electronics , vol. 71, no. 2, pp. 6700–6710, 2025.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment