스마트 시티를 위한 양자 영감 차량 네트워크 최적화
QIVNOM은 양자 영감 기법을 활용해 V2V·V2I 통신과 도시 교통 신호 제어를 동시에 최적화한다. 후보 라우팅·신호 계획을 확률적 중첩 상태로 표현하고 구면 투영 그라디언트와 어닐링 샘플링으로 업데이트한다. 엔탱글먼트형 정규화항이 통신·이동 결정을 결합하고, 체비셰프 다목적 스칼라화와 실현 가능성 투영으로 지연·신뢰성 제약을 만족한다. METR‑LA 기반 SUMO‑OMNeT++/Veins 시뮬레이션에서 평균 지연을 57.3 ms(≈20 %…
저자: Kamran Ahmad Awan, Sonia Khan, Eman Abdullah Aldakheel
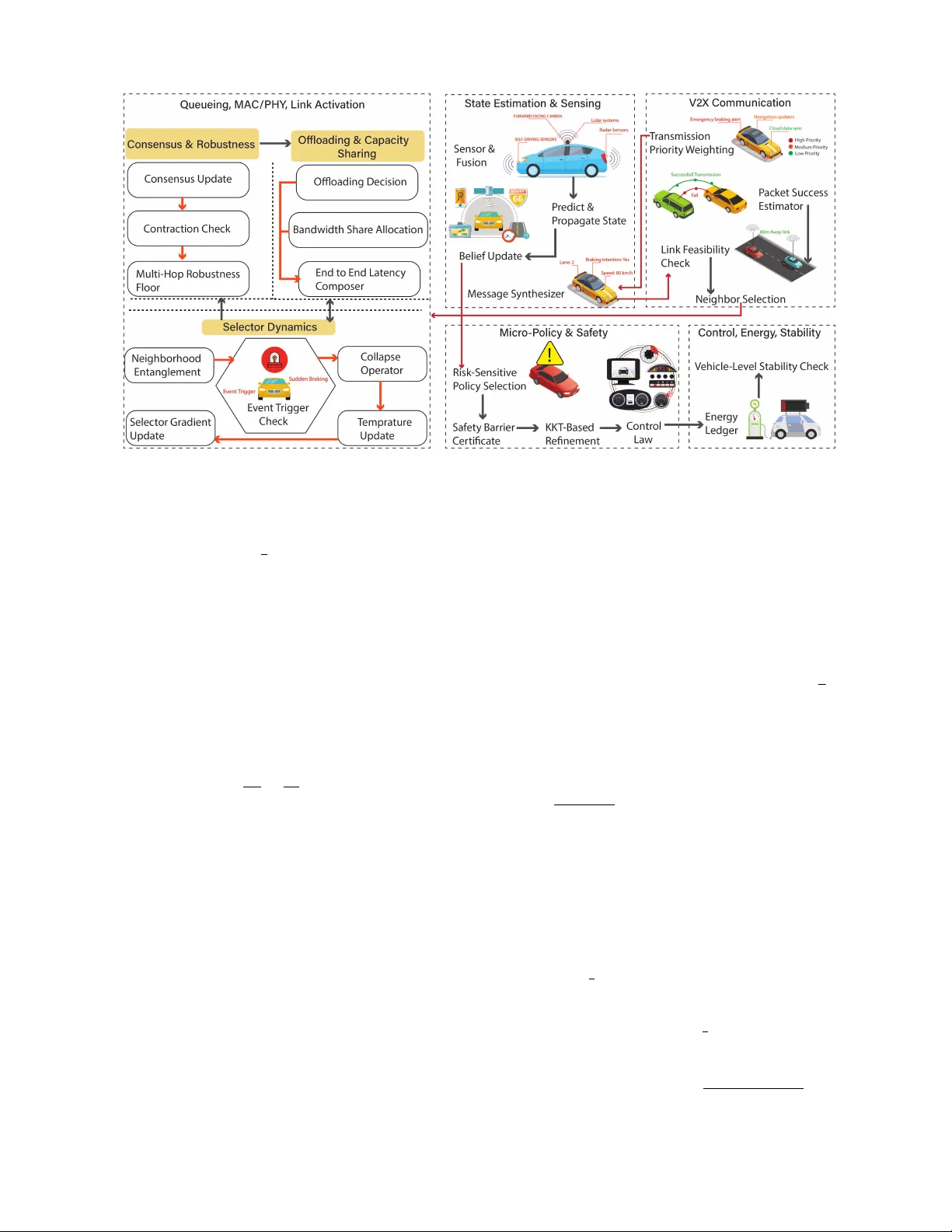
본 논문은 스마트 시티 환경에서 연결·자동화 차량(CAV)의 초저지연·고신뢰성 요구를 충족시키기 위해, 통신(V2V·V2I)과 도시 교통 제어를 하나의 통합 최적화 문제로 재정의한다. 기존 연구들은 주로 통신 스케줄링이나 교통 신호 최적화를 별도로 다루어, 네트워크 장애나 계산 자원 경쟁 상황에서 성능 저하가 발생한다는 한계를 지적한다. 이를 해결하고자 저자들은 양자 영감 프레임워크인 QIVNOM을 제안한다. QIVNOM은 다음과 같은 핵심 구성 요소를 포함한다. ① 후보 라우팅·신호 계획을 확률적 중첩 상태(superposition)로 인코딩하고, 구면 투영 구배(sphere‑projected gradient)와 어닐링 샘플링을 통해 반복적으로 업데이트한다. ② 엔탱글먼트형 정규화항(entanglement‑style regularizer)을 도입해 통신 변수와 이동 변수 사이의 상호 의존성을 수학적으로 결합한다. ③ 체비셰프 다목적 스칼라화(Tchebycheff scalarization)와 실현 가능성 투영(feasibility projection)을 이용해 지연, 신뢰성, 에너지 등 다중 목표를 동시에 만족한다. ④ 확률적 제약을 chance constraint 형태로 모델링하고, 라플라스 드리프트(Lyapunov‑drift) 제어를 적용해 시스템 안정성을 보장한다. ⑤ fog‑cloud 인프라에서 엔트로피 최적 수송(entropic optimal transport)을 사용해 최적 플랜을 fog 노드에 할당하고, 차량‑레벨 CVaR(Conditional Value at Risk) 마이크로 정책을 통해 로컬 안전성을 전역 목표와 정렬한다. 알고리즘 흐름은 차량‑레벨 센싱·예측·업데이트, 메시지 압축·전송, 로컬 큐 관리·PHY‑MAC 선택, 위험 회피 마이크로 정책, 에너지 회계, 그리고 최종적으로 전역 최적화를 위한 파동함수 업데이트 순으로 진행된다. 수학적 모델링에서는 차량 상태 방정식, 측정·예측 베이즈 업데이트, 메시지 희소성 제약, 링크 신뢰도 확률, 라그랑지안 최적조건, 그리고 파동함수의 엔탱글먼트 연산을 상세히 정의한다. 실험은 METR‑LA 교통 데이터에 기반한 5 km × 5 km 도시 구역을 SUMO와 OMNeT++/Veins 시뮬레이터로 구현하고, IEEE 802.11p와 5G NR 사이드링크를 혼합 사용한다. 비교 대상은 기존 V2X 라우팅·신호 최적화 기법, 강화학습 기반 접근법, 그리고 양자 어닐링(QUBO) 기반 모델이다. 결과는 QIVNOM이 평균 종단 지연을 57.3 ms(베이스라인 대비 약 20 % 감소)로 낮추고, 사고 상황에서는 62 ms vs 79 ms(‑21.5 %), RSU 정전 상황에서는 67 ms vs 86 ms(‑22.1 %)를 기록한다. 패킷 전달률은 96.7 %(+2.3 %p), 전체 신뢰성도 96.7 %를 유지하며, RSU 정전 시 96.8 %로 베이스라인 94.1 %를 앞선다. 교통 측면에서는 평균 여행 시간 12.8 분 vs 14.5 분, 혼잡도 33 % vs 37 %로 개선된다. 추가적인 소거 실험(ablation study)에서는 엔탱글먼트 정규화, 체비셰프 스칼라화, 라플라스 드리프트 각각이 성능 향상에 기여함을 확인한다. 논문은 QIVNOM이 양자 프로세서 없이도 양자 영감 알고리즘의 병렬 탐색 능력을 활용해 대규모 도시 차량 네트워크를 실시간으로 최적화할 수 있음을 입증한다. 향후 연구에서는 실제 도심 파일럿 테스트, 더 복잡한 다중 목표(예: 배출량 최소화) 통합, 그리고 하드웨어 가속(예: GPU 기반 파동함수 연산) 등을 제안한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기