Non-Linear Digital Self-Interference Cancellation for In-Band Full-Duplex Radios Using Neural Networks
Full-duplex systems require very strong self-interference cancellation in order to operate correctly and a significant part of the self-interference signal is due to non-linear effects created by various transceiver impairments. As such, linear cance…
Authors: Alexios Balatsoukas-Stimming
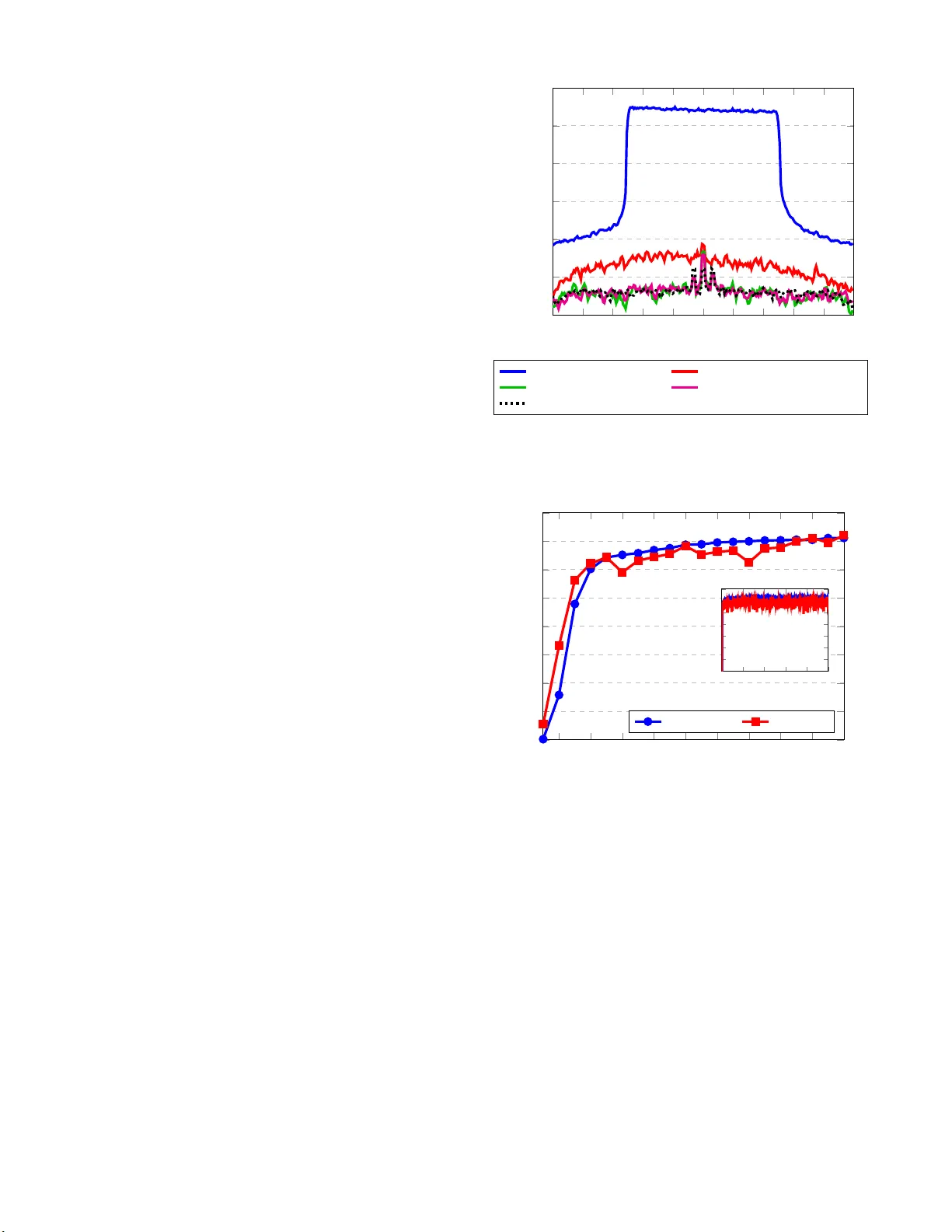
Non-Linear Digital Self- Interfer ence Cancella tion for In-Band Full-Duple x Radios Using Neural Networks Alexios Balatsouka s -Stimming T elecommu n ications Circuits Laboratory ´ Ecole polytechniqu e f ´ ed ´ erale d e Lausanne, CH-10 15 Lausanne, Switzerlan d alexios.balatsoukas@epfl.ch Abstract —Full-du p lex systems require very strong self- interference cancellation in order to operate correctly and a significant part of the self-in terference sig nal is due to non-l inear effects created by various transceiver impairments. As su ch, linear cancellation alone is usually not sufficient and sophisticated non-linear cancellation algo rithms ha ve been proposed in the literature. In this wo rk, we inv estigate the use of a neural network as an alternativ e to the tradit i onal non-linear cancellation method that is based on polynomial basis functions. Measur ement results from a full-du plex testbed demonstrate that a small and simple feed-forwa rd neural networ k canceler works ex ceptionally well, as it can match the perf ormance of the polynomial non-linear canceler with significantly lo wer com putational co mplexity . I . I N T R O D U C T I O N In-ban d full-duplex (FD) [1], [2], [3] is a pr omising method to incr ease the spe c tr al efficiency of current comm u nications systems by tran smitting an d r e cei ving d ata simultan eously in the same frequen cy b and. In o rder f or an FD node to operate correctly , the stron g self-interf e r ence (SI) sign al that is p r oduced at the node’ s recei ver by its o wn transmitter n e eds to be ef fecti vely canc e led. A combina tio n of SI cancellation in th e analo g and in th e the digital domain is usually necessary in order to suppress the SI signal d own to the lev el of the receiver noise floo r . Ana- log cancellation can be either passiv e (i.e., th r ough p hysical isolation betwe e n the transmitter and the receiver) or acti ve (i.e., through the injection o f a cancellation signal) and it is necessary in o rder to a void saturating the analog fr ont-end of the recei ver . Ho wever , p erfect cancellation in the a n alog domain is very challen ging and costly to achieve, me aning that a r esidual SI signal is still present at the recei ver after the analog cancellation stage. In principle, this residual SI signal should be easily cancelable in th e digital dom ain, since it is caused by a sign al th at is f u lly known. Unfortun ately , in prac- tice this is not the case as several transceiv er non - linearities, such as various baseband non-linea r ities (e.g., digital-to -analog conv erter ( D A C) a n d analog - to-digital co nverter (ADC)) [4], IQ imba la n ce [4], [5], phase-noise [6], [ 7], and power amplifier (P A) non-linear ities [4], [5], [8], [9], distort the SI signal. T h is means that complicated non- linear cancellation methods are required in order to fully supp ress th e SI to the level of the receiver n oise floor . These metho ds are based o n polyn omial expansions and the m ost recent and comprehensive model was presented in [9], wher e a p a r allel Hammerstein mo d el was used for dig ital SI cance llatio n that incorpo rates both P A non- linearities and IQ imbalance. Polynomial m odels h av e be en shown to work well in practice, but they can also have a high implementatio n co m plexity as the number of estimated parameters g rows rapidly with the max imum considere d non- linearity order an d beca use a large num b er of non-lin e ar basis fu n ctions ha ve to be com puted. An effecti ve complexity reduction technique that identifies the most significant non- linearity terms using princ ipal c ompone nt analysis (PCA) was also presented in [9]. Ho we ver , with this metho d the transmitted digital baseband samples need to be multip lied with a tr ansformatio n matrix to gen e rate the canc e llatio n signal, thus introdu cing ad ditional co mplexity . More over, as the authors mention, whenever the self-interference channel changes significantly , the PCA oper a tion n eeds to b e re-run. Contribution: In th is work, we propo se a non- lin ear SI cancellation meth od that u ses a neural network to construct the n on-linear part of th e digital ca n cellation signa l, as an alternative to the s tandard po lynomial models that are used in the literature. Our initial experimental results using measured samples f rom a hardware testbed demonstrate that a simple neural network b ased non-linea r canceler can alread y match the perfo rmance of a state-of-th e -art poly n omial model for non-lin e ar can cellation with the same number of learnable parameters, b ut with a sign ificantly lower computational co m- plexity for th e inf erence step (i. e., after training has been perfor med). Spec ifica lly , the neural network based non-linear canceler requires 36% fe wer r eal multiplications to be imp le- mented and it does n ot require th e computa tio n of any n on- linear basis function. Related W ork: Over the y ears, there has been sign ifican t interest in the a p plication of neural network s to various commun ications scenarios, which has b een renewed re c e ntly with a p articular f ocus on th e ph ysical layer [10]. As we are not aw are of any ap plications of neural networks for SI cancellation in fu ll-duplex radios in th e liter ature, we briefly outlin e some oth e r physical layer com munication s areas where neural ne twork s have bee n successfully applied. In [1 0], [11], th e e n tire transcei ver , including th e transmission channel D A C P A x ( n ) IQ Mixer x IQ ( n ) BP Filt er x P A ( n ) LN A ADC h SI BP Filt er y ( n ) IQ Mixer Local Oscillator Fig. 1. Basic m odel of a full-duple x transcei ver with a shared lo cal osci llator where some c omponents have been omitted for simpl icity . A more detailed model can be found in, e.g., [9]. and transceiv er n o n-idealities, w as treated as an auto- encoder neural network which can, in some cases, lear n an end-to -end signal proc e ssing algorithm that results in better err o r rate per- forman ce than traditio nal signal processing algo r ithms. Detec- tion f or molecu lar communication s using n eural n etworks was considered in [1 2]. The work o f [ 13] co nsidered a modification of the well-k nown belief pro pagation (BP) decoding algorithm for LDPC codes wh ere weights are assigned to each message in the T an ner graph of the code that is being decoded and deep learning techn iques are used in order to learn good values fo r these weights. A similar ap p roach was taken in [14], where the offset param eter of th e of fset m in-sum ( OMS) decoding algorithm are learn ed by using d eep lea rning techniques. The work of [15] considered using a n eural network in o r der to decode polar co des. In [16], [17], [18], n eural netw orks were employed in o rder to perform detectio n and in tra-user (and mostly linear ) successi ve interference cancellation in mu lti- user CDMA systems. Finally , the work of [1 9] co nsidered using neural networks for wireless resource management. I I . P O LY N O M I A L N O N - L I N E A R C A N C E L E R In this section we briefly revie w a state-of-the-ar t polyno - mial model for non-linear digital cancellation that ca n mitig ate the effects of both IQ imbalance and P A non -linearities [8], [9], which are usually the dom inant non-ide a lities, while the remaining tran sceiv er compone nts are assumed to be ide al. This mo del will serve as th e baseline fo r our co mparison in Section V. In Fig . 1 we show a simple full-d uplex tran sceiver architecture with a shared local oscillator, wh ich is useful for the description of the p olynom ial non-line a r can cellation model that follo ws. Let the co mplex digital transmitted signal at time instant n be deno te d by x ( n ) . This d igital signal is first converted to an analo g signal by the dig ital-to-analog co n verter (D A C) and then upc o n verted by an I Q mixer . The dig ital ba seb and equiv alent o f the signal after the IQ i mbalance introduced by the IQ mixer and assuming that th e DA C is ideal can be modeled as [9] x IQ ( n ) = K 1 x ( n ) + K 2 x ∗ ( n ) , (1) where K 1 , K 2 ∈ R and typically K 1 ≫ K 2 . The ou tput signal of th e mixer is amp lified by the P A, which introdu ces further non- linearities that can be mo deled using a parallel Hammerstein model as [9] x P A ( n ) = P X p =1 , p odd M X m =0 h P A ,p ( m ) x IQ ( n − m ) | x IQ ( n − m ) | p − 1 , (2) where h P A ,p is the impulse respon se for the p -th o rder non- linearity and M is the memory length of the P A. Th e x P A SI signal ar riv es at the receiver th r ough an SI channel with impulse r esponse h SI ( l ) , l = 0 , 1 , . . . , ( L − 1) . Assuming that the ADC and p o tential b aseband am p lifiers are ideal, the downcon verted and digitized received SI signal y ( n ) can be modeled as y ( n ) = L − 1 X l =0 h SI ( l ) x P A ( n − l ) . (3) By sub stituting (1 ) an d (2) in (3) and p erformin g some arithmetic manipulation s [8], [9], y ( n ) can be re-w r itten as y ( n ) = P X p =1 , p odd p X q =0 M + L − 1 X m =0 h p,q ( m ) x ( n − m ) q x ∗ ( n − m ) p − q , (4) where h p,q ( m ) is a chan n el con taining the comb in ed effects of K 1 , K 2 , h P A ,p , and h SI . By adapting th e e xpression of [9, Eq . (19)] to the case of a single an tenna, we can calculate the to tal number o f co mplex parameters h p,q ( m ) as n poly = ( M + L ) P + 1 2 P + 1 2 + 1 , (5) which g rows q uadratically with the P A n on-linear ity ord er P . The task of the n on-linear dig ital canceler is to comp ute estimates of all h p,q , which w e denote by ˆ h p,q , an d th en construct a n estimate of the SI signal, which we denote by ˆ y ( n ) , u sing ( 4) and subtract it fr om the received signal in the digital dom ain. The amoun t of SI cancellation over a win dow of length N , expressed in d B, is C dB = 10 log 10 P N − 1 n =0 | y ( n ) | 2 P N − 1 n =0 | y ( n ) − ˆ y ( n ) | 2 ! . (6) I I I . N E U R A L N E T W O R K N O N - L I N E A R C A N C E L E R In this section , we first provide a brief backgro und on n eural networks an d then we d e scribe ou r pr oposed n e ural n e twork based no n -linear can cellation method. A. F eed-forward Neural Networks Feed-for ward neural networks are direc ted g raphs that con- tain three types of no des, n amely inpu t nod es, hidd en n odes, and outpu t nodes, wh ich are organ ized in laye r s. An example of a f eed-for ward neural n e twork with 6 in put nod es, 5 hid d en nodes, an d 2 outpu t nodes is depicted in Fig . 2. Each edg e in ℜ{ x ( n ) } ℑ{ x ( n ) } ℜ{ x ( n − 1) } ℑ{ x ( n − 1) } ℜ{ x ( n − 2) } ℑ{ x ( n − 2) } ℜ{ ˆ y nl ( n ) } ℑ{ ˆ y nl ( n ) } Hidden layer Input laye r Output layer Fig. 2. A neural netw ork w ith 6 input, 5 hidden, and 2 output nodes. the grap h is associated with a weight. T he input to each n ode of the grap h is a weighted sum of the outpu ts of nod e s in the previous layer, while the outp u t of e a c h node is ob tained by applying a non -linear activa tion f unction to its inp u t. The weights can be optimized thr ough superv ised learning by u sing training sam ples that contain known inputs an d correspo n ding e xpected outp u ts. T o this end, a cost functio n is associated with the o utput nodes, which measures the distance between the ou tputs of the neu ral network using the current weights and th e expe cted ou tputs. Th e deriv ati ve o f the cost function with respect to each of the weigh ts in th e neural network can be efficiently compu ted using back-p r opagation and it can th en used in order to minim ize th e cost function using some gradient descen t variant. T r aining is perf ormed b y splitting th e data into mini-batch es and pe r forming a g radient descent u pdate after processing ea c h mini- b atch. One pass throug h the entire train in g set is called a training epoch . B. Neural Network Non -Linear Ca nceler The SI signal of (4) can be decomp osed as y ( n ) = y lin ( n ) + y nl ( n ) , (7) where y lin ( n ) is th e linear part of (4) (i.e., the ter m of the sum with p = 1 and q = 1 ) a n d y nl ( n ) co ntains all rem aining (non - linear) term s. W e p ropose to use standard linear cance llatio n to co n struct an estimate of y lin ( n ) , denoted by ˆ y lin ( n ) , while considerin g th e muc h weaker y nl ( n ) sig n al as no ise, and then reconstruc t y nl ( n ) using a neural network. Specifically , th e linear canceler first computes ˆ h 1 , 1 using standard least-squares channel estimation [8], [9], and then uses ˆ h 1 , 1 to construct ˆ y lin ( n ) a s follows ˆ y lin ( n ) = M + L − 1 X m =0 ˆ h 1 , 1 ( m ) x ( n − m ) . (8) The linear ca n cellation signal is then sub tracted from the SI signal in order to obtain y nl ( n ) ≈ y ( n ) − ˆ y lin ( n ) , (9) The goal of th e n eural n etwork is to r econstruct eac h y nl ( n ) sample based on the su bset of x that this y nl ( n ) sample depend s on ( cf. (4 )). Since n eural networks g enerally oper a te on real number s, we split all comp lex baseband signals into their r eal and imag in ary parts. W e n ote that, in princip le the neural network could learn to cancel both the line ar and the non-lin e ar par t of the signal. Howev er , b ecause the non -linear part of the SI sign al is si gnificantly weaker than the linear part, in practice ou r experimen ts ind icate that the noise in the gradient co mputation due to the use of mini-batches essentially hides the non- linear structu r e fro m the learn ing algor ithm. W e use a single layer f eed-forward n eural n etwork a s depicted in Fig. 2. The neur a l network has 2( L + M ) inpu ts nodes, which co rrespond to the real an d imaginary parts of the ( M + L ) delay ed version s of x in (4), and two outpu t no des, which correspond to the r eal and imaginary parts o f the tar get y nl ( n ) sample. Th e numb er of hidden nod es is denoted by n h and is a pa r ameter that ca n be ch o sen fr eely . For the neu rons in the hidden layer, we use a rectified line a r unit (ReLU) activ ation fun ction, defined as ReLU ( x ) = max(0 , x ) , wh ile the outp u t neuron s use an iden tity activ ation fu nction. W e no te that, a part f rom the c onnection s that are visible in Fig. 2, each nod e has also h as a bia s inp ut, which we hav e omitted fr om the figure for simplicity . Thus, the total numbe r of (real- valued) weights that need to be estimated is n w = (2 M + 2 L + 1 ) n h + 2( n h + 1) . (10) Moreover , th e linear cancellation stage that precedes the neural network has 2( M + L ) real par ameters that need to be estimated. Thus, the total num ber o f lear n able p arameters for our pr oposed n eural network canc e ler is n NN = n w + 2( M + L ) . (11) I V . C O M P U TA T I O NA L C O M P L E X I T Y In th is section, we analyze the compu tational comp lexity of the poly nomial and th e neural n etwork can celer in terms of the requ ir ed n u mber of real a dditions and mu ltiplications f or the inf erence step (i.e., af ter training has been per f ormed) . W e note that, the comp utational complexity of the training phase is also an importan t aspect th at should be considered, b ut it is beyond th e scope of this paper du e to spa ce limitations. A. P o lynomial Canceler In order to derive the compu tational comp lexity of the polyno mial canceler, we ignore the terms in (4) for p = 1 and q = 1 , since these correspo nd to th e lin e a r cancellatio n which is also perfo rmed verba tim for the neura l n etwork canceler . This mea ns that there remain n poly − M − L co mplex parameters in (4). Moreover , in o rder to p erform a best-case complexity ana ly sis for the polyno mial canceler, we assume that the calculation of th e basis fun ctions in (4) com es a t no computatio nal cost. F or the n on-linear part of ( 4), n poly − M − L complex parameters need to be summed, so the minimum required total number o f real additions is n ADD,poly = 2( n poly − M − L − 1 ) . (12) Moreover , assuming th at each complex m ultiplication is implemented optimally using three re al m ultiplications, the number of r eal multiplicatio n s b e tween the comp lex param- eters h p,q ( m ) an d the com plex basis function s is n MUL,poly = 3( n poly − M − L ) . (13) B. Neural Network Can celer For each of the n h hidden neuro ns, 2 M + 2 L + 1 incoming real values nee d to be sum med, which requir es a total of at least (2 M + 2 L ) n h real additions. Mor eover , at each o f the two output neuron s, n h + 1 real values need to be summed, which requires a to tal of at least 2 n h real ad ditions. The comp utation of eac h of the n h ReLU activ ation func tions requires on e multiplexer (and one comparato r with zero, which can be trivially imp lemented b y looking at the MSB). Assuming a worst case whe re a multip lexer h as the sam e complexity as an addition, the total num ber of real additions required by the neural n etwork can celer is n ADD,NN = (2 M + 2 L + 3 ) n h . (14) Excludin g the biases which are not in v olved in multiplications, there are (2 M + 2 L ) n h real weig hts that are multiplied with the real input values and 2 n h real weig hts that a r e multiplied with the real o utput values from the h id den nodes. T h us, the total numb e r of real multiplication s requ ired by the neu ral network canceler is n MUL,NN = (2 M + 2 L + 2 ) n h . (15) V . E X P E R I M E N TA L R E S U LT S In this section, we first briefly describe o ur e xperimental setup an d then we presen t results to comp are the digital cancellation achieved by the stan dard polyn omial n on-linear cancellation m ethod and o ur pr oposed neur a l network ba sed method. W e no te that all results are o btained using actual measured baseba n d samp les and not simulated wa veforms. A. Experimenta l Setup Full-Duplex T e stbed: Our full-d uplex hard ware testbed, which is described in more detail in [ 2 0], [21], [ 4], uses a National Instrumen ts Fle xRIO device and two FlexRIO 5791 R RF transceiver mod u les. W e use a QPSK-mo dulated OFDM signal with a passban d bandwidth of 10 MHz and N c = 1024 carriers. W e sample th e sign al with a samp ling f r equency of 20 MHz so that we can also ob serve the signal side-lo b es. Each transmitted OFDM frame consists of ap proximately 20 , 00 0 baseband samp le s, ou t of which 90 % are used for training and the remain ing 10% are used to c a lculate the achieved SI cancellation, both for the polynomial mode l and for the neural network. W e u se an average transmit power o f 10 d Bm and our two-antenna FD testbed setup provides a passive a n alog suppression of 53 dB. W e n ote that we do not perf o rm activ e analog cancellatio n as, for th e results p r esented in this p aper, the ach iev ed passive suppr ession is sufficient. P o lynomial Model: For the p olynom ial model, we present results for M + L = 13 tap s for th e e quiv alent SI chann el and for a maximum non -linearity or der of P = 7 , sinc e further increasing th ese param eters results in very limited gain s in the − 10 − 8 − 6 − 4 − 2 0 2 4 6 8 10 − 170 − 160 − 150 − 140 − 130 − 120 − 110 Frequenc y (MHz) Po wer Spec tral Density (dBm/Hz) SI Si gnal ( − 42 . 7 dBm) Linear DC ( − 80 . 6 dBm) Polynomial DC ( − 87 . 5 dBm) Neural Networ k DC ( − 87 . 7 dBm) Noise Flo or ( − 90 . 8 dBm) Fig. 3. Po wer spectral densitie s of the SI signal, the SI signal after linear cance llati on, as well as the SI signal after non-linear ca ncella tion using both the polynomia l model and the proposed neural netwo rk. W e also show the measured noise floor for reference . 2 4 6 8 10 12 14 16 18 20 0 1 2 3 4 5 6 7 8 Tra ining Epoch Non-Linear SI Ca ncell ation (dB) Trainin g Frames T est Frames 0 200 400 600 800 1000 1 2 3 4 5 6 7 8 Training Epoch Non-Linear SI Cancellation (dB) Fig. 4. Achie ved non-linear SI cancellat ion on the traini ng frames and the test frames as a function of the number of traini ng epochs. achieved SI suppression , and after so m e point even decreased perfor mance on the test frames due to ov erfitting. The total number of comp lex parameter s h p,q ( m ) is n poly = 260 , meaning that a total of 2 n poly = 520 real param eters have to be estimated. As in [8], [9], we use a standard least-squares formu latio n in order to co mpute all ˆ h p,q ( m ) . Neural Network: The neu ral network was imp lemented using the K eras framework with a T en sorFlow backend. More- over , we use the Adam o ptimization algor ithm for train ing with a mean-sq uared erro r cost fu nction, a lea r ning rate of λ = 0 . 00 4 , and a mini-b atch size of B = 32 . All remaining param eters ha ve their default values. In order to provide a fair compar iso n with the polyno mial mod el, we use 2( M + L ) = 26 inp ut un its an d n h = 17 h idden un its so that n w = 4 95 weights h ave to be learn e d by the neu ral network and the total number of weigh ts an d real p arameters that n eed to b e estimated is n NN = 521 . B. Experimenta l Self-In terfer ence Cancella tion Re sults In Fig. 3 we pr esent SI can cellation results using the polyno mial model of Section I I and our pro posed neural network. W e ca n ob serve th a t digital linear cancellation pro- vides app roximately 38 dB of can cellation, while both no n- linear c a n celers can furth er decrease the SI signal power b y approx imately 7 d B, br inging it very close to the receiver noise floor . T he residu al SI power for b oth cancelers is slightly above the noise floo r , but th is is mainly due to the peaks close to the DC frequ ency , for which we cu rrently do not have a co n sistent explanation, and no t d ue to an actual r esidual signal. In Fig. 4 we o bserve that after o nly 4 training epochs the neural network can already achieve a no n-linear SI cancel- lation o f over 6 dB on b oth the training a nd the test frames. After 20 training epoch s the non-linear SI cancellation reaches approx imately 7 dB, which is the same level of ca ncellation that the p olynomia l m odel can achieve, and there is no obvious indication of overfitting since the SI cancellation on the training and on the test d ata is very similar . Moreover, in the inset figure we observe that allo wing f or sig n ificantly more training epoc h s d oes not imp rove the per formanc e further . C. Computa tional Complexity For P = 7 , M + L = 13 , and n h = 17 , the poly- nomial non-lin ear canceler requ ir es n ADD,poly = 492 real additions and th e neu ral ne twork no n-linear can celer requ ires n ADD,NN = 493 r eal additions, which is prac tica lly id entical. Howe ver , the polyn omial canceler requires n MUL,poly = 741 real m ultiplications while the neur a l network canceler o nly requires n MUL,NN = 4 76 rea l m u ltiplications, which is a reduction of appro ximately 36 %. W e no te that, in reality the reduction is m u ch more significant sin c e the calculatio n o f the b asis fu nctions in (4) also requ ires a large numb er of r eal multiplications. V I . C O N C L U S I O N In this p aper, we have d emonstrated throug h experimental measuremen ts that a small fe e d -forward n eural n etwork with a single hid den layer containing n h = 17 hidden nodes, a ReLU activ ation function, and 20 tr aining epochs can achieve the same non- linear digital can cellation perf o rmance as a polyno mial-based n o n-linear can celer with a max im um non - linearity or d er of P = 7 while at the same time requiring 36% fewer real m ultiplications to be im plemented. A C K N O W L E D G M E N T The autho r gratefu lly ack nowledges the support of NVIDIA Corporatio n with th e do nation of the Titan Xp GPU u sed for this researc h . Th e a u thor would also like to than k Mr . Or ion Afisiadis for his aid in carry in g out the full-duplex tes tbed measuremen ts and Prof . And reas Burg for usefu l discussions. R E F E R E N C E S [1] M. Jain, J. I. Choi, T . Kim, D. B haradia , S. Seth, K. Sri ni v asan, P . Levi s, S. Katti, and P . Sinha, “Practi cal, real-time, full duple x wireless, ” in Proc . 17t h Internati onal Confer ence on Mobile Computing and Networking . A CM, 2011, pp. 301–3 12. [2] M. Duart e, C. Dick, and A. Sabha rwal , “Experiment-dri v en characteri - zatio n of full-duple x wire less syste ms, ” IE EE Tr ans. W ir eless Commun. , vol. 11, no. 12, pp. 4296–4307, Dec . 2012 . [3] D. Bharadi a, E. McMilin, and S . Katti, “Full duplex radios, ” in ACM SIGCOMM , 2013, pp. 375–386. [4] A. Bal atsoukas-St imming, A. C. M. Austin, P . Belanovi c, and A. Burg., “Baseba nd and RF hardware impairments in full-duple x w ireless sys- tems: expe rimental character isation and suppression, ” EURASIP Jou rnal on W ir eless Communication s and Net working , v ol. 2015, no. 142, 201 5. [5] D. Korpi, L. Anttila , V . Syrjala, and M. V alkama, “Wid ely linea r digita l self-int erferenc e canc ellat ion in direct-con version full-duplex transce i ver , ” IEEE J. Sel. A re as Commun. , vol. 32, no. 9, pp. 1674– 1687, Sep. 2014 . [6] A. Sahai, G. Patel , C. Dick, and A. Sabharwal, “On the impact of phase noise on acti ve cancela tion in wireless full-duplex , ” IE EE T rans. V eh. T ec hnol. , vol. 62, no. 9, pp. 4494–4510, Nov . 2013 . [7] V . Syrjala , M. V alkama, L. Anttila, T . Riihonen, and D. Korpi , “ Analysis of oscillator phase-noise effec ts on sel f-interfe rence cancella tion in full- duple x OFDM radio transcei v ers, ” IEEE T ran s. W ir ele ss Commun. , vol. 13, no. 6, pp. 2977–2990, June 2014. [8] L. Anttil a, D. Korpi , E . Antonio-Rodr ` ıguez, R. Wi chman, and M. V alkama, “Modeling and effic ient cance llati on of nonlinear self- interfe rence in MIMO full-duple x tran scei ve rs, ” in Glo becom W ork- shops , 2014, pp. 777–783. [9] D. K orpi, L. Antti la, and M. V alkama, “Nonlin ear self-inte rferenc e can- cella tion in MIMO full-duple x transcei vers under crosstalk, ” EURASIP J ournal on W ir eless Comm. and Netw . , vol. 2017, no. 1, p. 24, Feb . 2017. [10] T . J . O’Shea and J. Hoydis, “ An introduct ion to deep learning for the physical laye r , ” IE EE T rans. on Cogn. Commun. and Networking , vol. 3, no. 4, Dec . 2017 . [11] T . J . O’Shea, K. Karra, and T . C. Clanc y , “Learning to communicate: Channel auto-en coders, domain specific regula rizers, and attenti on, ” in IEEE Internati onal Symposium on Signal Pr ocessing and Information T ec hnolo gy , Dec. 2016, pp. 223–228. [12] N. Farsa d and A. Goldsmith , “Detect ion algorithms for commu- nicat ion systems using deep learn ing, ” ArX iv e-print s , May 2017, https:/ /arxi v .org/abs/ 1705.08044 . [13] E. Nachman i, Y . Be’er y , and D. Bur shtein, “Learning to dec ode linear codes using deep learning, ” in Allerton Conf. on Comm., Co ntr ol, and Computing , Sep. 2016, pp. 341–346. [14] L. Lugosch and W . J. Gross, “Neura l offset min-sum decoding, ” in IEEE Internati onal Symposium on Inf ormation Theo ry (ISIT) , Jun. 2017. [15] T . Gruber , S. Cammerer , J. Hoydis, and S. ten Brink, “On deep learni ng- based channel decoding, ” in Annual Conf. on Inf. Science s and Syst. , Mar . 2017, pp. 1–6. [16] B. Aazhang, B. P . Paris, and G. C. Orsak, “Neural networks for multiuser detect ion in code-di visio n m ultipl e-acc ess communicat ions, ” IEEE T rans. Commun. , vol. 40, no. 7, pp. 1212–1 222, Jul 1992. [17] M.-H. Y ang, J.-L. Chen, and P .-Y . Cheng, “ Successi ve interfe rence cance llati on recei ve r with neural network compensati on in the CDMA systems, ” in A silomar Confer ence on Signals, Systems and Computers , vol. 2, Oct 2000, pp. 1417–1420. [18] B. Geev arghese, J. Thomas, G. Ninan, and A. Francis, “CDMA in- terfere nce canc ellat ion techniq ues using neural networks in rayleigh channe ls, ” in Internatio nal Confer ence on Informati on Communication and Embedded Systems (ICICES) , Feb 2013, pp. 856–860. [19] H. Sun, X. Chen, Q. Shi, M. Hong, X. Fu, and N. D. Sidiropoulos, “Learning to optimize: Traini ng deep neural netw orks for wireless resource m anageme nt, ” in IEEE Int. W orkshop on Sig. Proc. Advances in W ir eless Commun. (SP A WC) , Jul. 2017, pp. 1–6. [20] A. Balatsouka s-Stimming, P . Belanovi c, K. Alexandri s, and A. Burg, “On self-inte rferenc e suppre ssion methods for lo w-comple xity full- duple x MIMO, ” in Asilomar Confere nce on Signals, Systems and Com- puter s , No v . 2013, pp. 992–997. [21] P . Bela novi c, A. Bal atsoukas-Sti mming, and A. Burg, “ A multi purpose testbed for full-duplex wire less co mmunicatio ns, ” in IEEE International Confer enc e on Electr onics, Circuit s, and Systems , Dec. 2013, pp. 70–71.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment