Hit-and-Run for Sampling and Planning in Non-Convex Spaces
We propose the Hit-and-Run algorithm for planning and sampling problems in non-convex spaces. For sampling, we show the first analysis of the Hit-and-Run algorithm in non-convex spaces and show that it mixes fast as long as certain smoothness conditi…
Authors: Yasin Abbasi-Yadkori, Peter L. Bartlett, Victor Gabillon
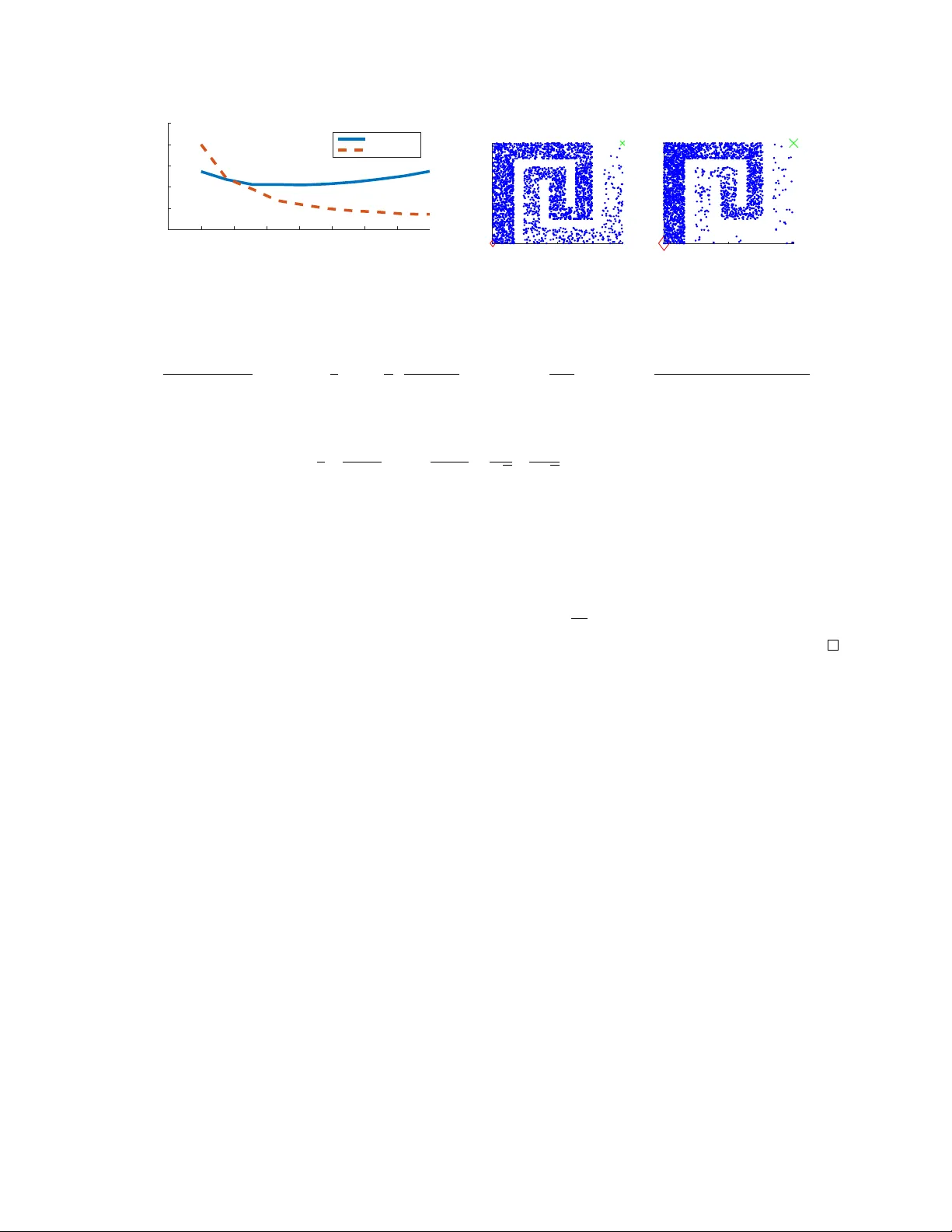
Hit-and-Run for Sampling and Planning in Non-Con v ex Spaces Y asin Abbasi-Y adk ori Queensland Univ ersity of T ec hnology yasin.abbasiyadkori@qut.edu.au P eter L. Bartlett UC Berk eley and QUT bartlett@eecs.berkeley.edu Victor Gabillon Queensland Univ ersity of T ec hnology victor.gabillon@qut.edu.au Alan Malek UC Berk eley malek@eecs.berkeley.edu Octob er 28, 2016 Abstract W e prop ose the Hit-and-Run algorithm for planning and sampling problems in non-conv ex spaces. F or sampling, w e show the first analysis of the Hit-and-R un algorithm in non-conv ex spaces and sho w that it mixes fast as long as certain smoothness conditions are satisfied. In particular, our analysis reveals an in triguing connection betw een fast mixing and the existence of smo oth measure-preserving mappings from a con vex space to the non-con vex space. F or planning, we show adv an tages of Hit-and-R un compared to state-of-the-art planning metho ds such as Rapidly-Exploring Random T rees. 1 In tro duction Rapidly-Exploring Random T rees (RR T) (LaV alle, 1998, LaV alle and Kuffner Jr., 2001) is one of the most p opular planning algorithms, esp ecially when the search space is high-dimensional and finding the optimal path is computationally exp ensive. RR T p erforms well on many problems where classical dynamic programming based algorithms, such as A*, p erform p o orly . RR T is essen tially an exploration algorithm, and in the most basic implemen tation, the algorithm even ignores the goal information, whic h seems to b e a ma jor reason for its success. Planning problems, especially those in rob otics, often feature narrow pathw ays connecting large explorable regions; com bined with high dimensionality , this means that finding the optimal path is usually in tractable. Ho wev er, RR T often provides a fe asible path quic kly . Although many attempts hav e been made to impro ve the basic algorithm (Abbasi-Y adkori et al., 2010, Karaman and F razzoli, 2010, 2011), RR T has prov en difficult to impro ve upon. In fact, given extra computation, rep eatedly running RR T often pro duces comp etitive solutions. In this pap er, we sho w that a simple alternative greatly improv es up on RR T. W e prop ose using the Hit-and-Run algorithm for feasible path search. Arguably simpler than RR T, the Hit-and-Run is a rapidly mixing MCMC sampling algorithm for pro ducing a p oint uniformly at random from a con vex space (Smith, 1984). Not only Hit-and-R un finds a feasible path faster than RR T, it is also more robust with resp ect to the geometry of the space. Before giving more details, we define the planning and sampling problems that we consider. Let Σ b e a b ounded connected subset of R n . F or points a, b ∈ Σ , we use [ a, b ] to denote their (one-dimensional) conv ex h ull. Given a starting point a 1 and a goal region G ⊂ Σ , the planning pr oblem is to find a sequence of p oints { a 1 , a 2 , . . . , a τ } for τ ≥ 1 such that all p oints are in Σ , a τ is in G , and for t = 2 , . . . , τ , [ a t − 1 , a t ] ⊂ Σ . The sampling pr oblem is to generate p oints uniformly at random from Σ . Sampling is often difficult, but Mark ov Chain Monte Carlo (MCMC) algorithms hav e seen empirical and theoretical success (Lovász and V empala, 2007). MCMC algorithms, such as Hit-and-Run and Ball-W alk (V empala, 2005), sample a Mark ov Chain on Σ that has a stationary distribution equal to the uniform distribution on Σ ; then, if we run the Mark ov Chain long enough, the marginal distribution of the sample is guaran teed to come from a 1 a 1 a 2 a 3 a 4 a 5 a 6 a 1 a 2 a 3 a 4 a 5 a 6 Figure 1: RR T (left) and Hit-and-Run (right) distribution exp onentially close to the target distribution. Solving the sampling problem yields a solution to the planning problem; one can generate samples and terminate when a t hits G . Let us define Hit-and-Run and the RR T algorithms (see also Figure 1 for an illustration). Hit-and- R un defines a Marko v c hain on Σ where the transition dynamics are as follows. A direction is chosen uniformly at random, and a t +1 is chosen uniformly from the largest chord contained in Σ in this direction passing through a t . This Marko v Chain has a uniform stationary distribution on Σ (Smith, 1984). As a planning algorithm, this chain contin ues until it hits the goal region. Let τ b e the stopping time. The solution path is { a 1 , a 2 , . . . , a τ } . On the other hand, the RR T algorithm iterativ ely builds a tree T with a 1 as a ro ot and no des lab eled as a n ∈ Σ and edges { a m , a n } that satisfy [ a m , a n ] ⊆ Σ . T o add a p oin t to the tree, a r is uniformly sampled from Σ and its nearest neighbor a n ∈ T is computed. If [ a n , a r ] ⊂ Σ , then no de a r and edge [ a n , a r ] are added to T . Otherwise, w e searc h for the p oint a e ∈ [ a n , a r ] farthest from a n suc h that [ a n , a e ] ⊆ Σ . Then a e and [ a n , a e ] are added to the tree. This pro cess is contin ued un til w e add an edge terminating in G and the sequence of p oints on that branc h is returned as the solution path. In the presence of dynamic constraints, a differen t v ersion of RR T that mak es only small local steps is used. These versions will be discussed in the exp erimen ts section. There are t wo main contributions on this pap er. First, we analyze the Hit-and-Run algorithm in a non-conv ex space and sho w that the mixing time is p olynomial in dimensionalit y as long as certain smo othness conditions are satisfied. The mixing time of Hit-and-R un for conv ex spaces is known to b e p olynomial (Lov ász, 1999). How ev er, to accommo date planning problems, we fo cus on non-conv ex spaces. Our analysis reveals an in triguing connection b etw een fast mixing and the existence of smo oth measure- preserving mappings. The only existing analysis of random walk algorithms in non-con vex spaces is due to Chandrasek aran et al. (2010) who analyzed Ball-W alk in star-shap ed bo dies. 1 Second, w e prop ose Hit-and-R un for planning problems as an alternative to RR T and sho w that it finds a feasible path quic kly . F rom the mixing rate, we obtain a b ound on the exp ected length of the solution path in the planning problem. Suc h p erformance guarantees are not av ailable for RR T. The current pro of tec hniques in the analysis of Hit-and-R un hea vily rely on the con vexit y of the space. It turns out that non-con vexit y is sp ecially troubling when p oints are close to the b oundary . W e o vercome these difficulties as follo ws. First, Lovász and V empala (2006) show a tigh t isop erimetic inequality in terms of av erage distances instead of minim um distances. This enables us to ignore points that are sufficien tly close to the b oundary . Next we sho w that as long as p oin ts are sufficien tly far from the b oundary , the cross-ratio distances in the conv ex and non-conv ex spaces are closely related. Finally we show that, given a curv ature assumption, if tw o p oints are close geometrically and are sufficiently far from the b oundary , then their prop osal distributions must b e close as well. Hit-and-R un has a n umber of adv antages compared to RR T; it do es not require random p oints sampled from the space (which is itself a hard problem), and it is guaran teed to reac h the goal region with high 1 W e sa y S is star-shap ed if the kernel of S , define by K S = { x ∈ S : ∀ y ∈ S [ x, y ] ⊂ S } , is nonempty . 2 probabilit y in a p olynomial num b er of rounds. In contrast, there are cases where RR T growth can b e v ery slo w (see the experiments sections for a discussion). Moreov er, Hit-and-R un provides safer solutions, as its paths are more likely to stay aw ay from the boundary . In contrast, a common issue with RR T solutions is that they tend to b e close to the b oundary . Because of this, further p ost-processing steps are needed to smo oth the path. 1.1 Notation F or a set K , we will denote the n -dimensional volume by v ol ( K ) , the ( n − 1) -dimensional surface v olume b y S K = v ol n − 1 ( ∂ K ) , and the boundary by ∂ K . The diameter of K is D K = max x,x 0 ∈ K | x − x 0 | , where |·| will b e used for absolute v alue and Euclidean norm, and the distance betw een sets K 1 and K 2 is defined as d ( K 1 , K 2 ) = min x ∈ K 1 ,y ∈ K 2 | x − y | . Similarly , d ( x, K ) = d ( { x } , K ) . F or a set K , w e use K to denote { x ∈ K : d ( x, ∂ K ) ≥ } . Finally , for distributions P and Q , we use d tv ( P , Q ) to denote the total v ariation distance b etw een P and Q . W e will also need some geometric quantities. W e will denote lines (i.e., 1-dimensional affine spaces) by ` . F or x, y ∈ K , we denote their conv ex hull, that is, the line segment b et ween them, by [ x, y ] and ` ( x, y ) the line that passes through x and y (whic h contains [ x, y ] ). W e also write [ x 1 , . . . , x k ] to denote that x 1 , . . . , x k are collinear. W e also use ` K ( x, y ) to denote the longest connected chord through x ∈ K and y ∈ K con tained in K and | ` K ( x, y ) | its length. W e use a ( x, y ) and b ( x, y ) to denote the endp oin ts of ` K ( x, y ) that are closer to x and y , resp ectiv ely , so that ` K ( x, y ) = [ a ( x, y ) , b ( x, y )] = [ b ( y , x ) , a ( y , x )] . The Euclidean ball of unit radius centered at the origin, B n (0 , 1) ⊂ R n , has volume π n . W e use x 1: m to denote the sequence x 1 , . . . , x m . Finally we use a ∧ b to denote min( a, b ) . 2 Sampling from Non-Con v ex Spaces Most of the known results for the sampling times of the Hit-and-Run exist for conv ex sets only . W e will think of Σ as the image of some conv ex set Ω under a measure preserving, bilipschitz function g . The goal is to understand the relev ant geometric quantities of Σ through prop erties of g and geometric prop erties of Ω . W e emphasize that the existence of the map g and its prop erties are necessary for the analysis, but the actual algorithm do es not need to kno w g . W e formalize this assumption b elow as w ell as describ e ho w w e in teract with Σ and presen t a few more technical assumptions required for our analysis. W e then presen t our main result, and follo w that with some conductance results b efore mo ving on to the pro of of the theorem in the next section. Assumption 1 (Oracle A ccess) . Given a p oint u and a line ` that p asses thr ough u , the or acle r eturns whether u ∈ Σ , and, if so, the lar gest c onne cte d interval in ` ∩ Σ c ontaining u . Assumption 2 (Bilipsc hitz Measure-Preserving Embeddings) . Ther e exist a c onvex set Ω ⊂ R n and a bilipschitz, me asur e-pr eserving map g such that Σ is the image of Ω under g . That is, ther e exists a function g with | D g ( x ) | = 1 (i.e. the Jac obian has unit determinant) with c onstants L Σ and L Ω such that, for any x, y ∈ Ω , 1 L Ω | x − y | ≤ | g ( x ) − g ( y ) | ≤ L Σ | x − y | . In wor ds, g is me asur e-pr eserving, g is L Σ -Lipschitz, and g − 1 is L Ω -Lipschitz. As an example, F onseca and Parry (1992) shows that for any star-shaped space, a smo oth measure- preserving embedding exists. One interesting consequence of Assumption 2 is that b ecause the mapping is measure-preserving, there must exist a pair x, y ∈ Ω such that | g ( x ) − g ( y ) | ≥ | x − y | . Otherwise, R Ω g ≤ 1 , a con tradiction. Similarly , there must exist a pair u, v ∈ Σ such that g − 1 ( u ) − g − 1 ( v ) ≥ | u − v | . Thus, L Ω , L Σ ≥ 1 . (1) 3 T o simplify the analysis, we will assume that Ω is a ball with radius r . In what follo ws, w e use x, y , z to denote p oints in Ω , and u, v , w to denote p oints in Σ . W e will also assume that Σ has no sharp corners and has a smo oth b oundary: Assumption 3 (Lo w Curv ature) . F or any two dimensional plane H ⊂ R n , let κ H b e the curvatur e of ∂ Σ ∩ H and R H b e the p erimeter of ∂ Σ ∩ H . W e assume that Σ has low curvatur e, i.e. that κ = sup H κ H R H is finite. Assumption 2 do es not imply lo w curv ature, as there exist smo oth measure-preserving mappings from the unit ball to a cub e (Griepentrog et al., 2008). Assumption 4. W e assume that the volume of Σ is e qual to one. W e also assume that Σ c ontains a Euclide an b al l of r adius one. Note that the unit ball has volume less than 1 for n > 12 , so for small dimensional problems, w e wil l need to relax this assumption. W e motiv ate the forthcoming tec hnical machinery by demonstrating what it can accomplish. The following theorem is the main result of the pap er, and the pro of makes up most of Section 3. Theorem 5. Consider the Hit-and-Run algorithm. L et σ 0 b e the distribution of the initial p oint given to Hit-and-R un , σ t b e the distribution after t steps of Hit-and-Run , and σ b e the stationary distribution (which is uniform). L et M = sup A σ 0 ( A ) /σ ( A ) . L et b e a p ositive sc alar. After t ≥ C 0 n 6 log M steps, we have d tv ( σ t , σ ) ≤ . Her e C 0 is a low or der p olynomial of L Ω , L Σ , κ . 3 Analysis This section prov es Theorem 5. W e begin by stating a num ber of useful geometrical results, whic h allo w us to pro ve the t wo main comp onents: an isoperimetric inequality in Section 3.2 and a total v ariation inequality in Section 3.3. W e then combine everything in Section 3.4. 3.1 F ast Mixing Mark o v Chains W e rely on the notion of conductance as our main technical to ol. This section recalls the relev ant results. W e say that p oin ts u, v ∈ Σ see each other if [ u, v ] ⊆ Σ . W e use view ( u ) to denote all p oin ts in Σ visible from u . Let ` Σ ( u, v ) denote the chord through u and v inside Σ and | ` Σ ( u, v ) | its length. Let P u ( A ) b e the probabilit y of being in set A ⊂ Σ after one step of Hit-and-Run from u and f u its density function. By an argumen t similar to the argumen t in Lemma 3 of Lov ász (1999), we can sho w that f u ( v ) = 2 1 { v ∈ view ( u ) } nπ n | ` Σ ( u, v ) | · | u − v | n − 1 . (2) The conductance of the Marko v process is defined as Φ = inf A ⊂ Σ R A P u (Σ \ A ) du min( v ol ( A ) , vol (Σ \ A )) . W e b egin with a useful conductance result that applies to general Mark ov Chains. Lemma 6 (Corollary 1.5 of Lo v ász and Simono vits (1993)) . L et M = sup A σ 0 ( A ) /σ ( A ) . Then for every A ⊂ Σ , | σ t ( A ) − σ ( A ) | ≤ √ M 1 − Φ 2 2 t . 4 Pro ving a low er b ound on the conductance is therefore a k ey step in the mixing time analysis. Previous literature has sho wn suc h lo wer b ounds for con vex spaces. Our ob jective in the following is to obtain such b ounds for more general non-conv ex spaces that satisfy bilipsc htiz measure-preserving embedding and low curv ature assumptions. As in previous literature, w e shall find that the following cr oss-r atio distanc e is v ery useful in deriving an isop erimetric ine quality and a total variation ine quality . Definition 1. L et [ a, u, v, b ] b e c ol line ar and inside Σ , such that a, b ∈ ∂ Σ . Define d Σ ( u, v ) = | a − b | | u − v | | a − u | | v − b | . It is easy to see that d Σ ( u, v ) ≥ 4 | u − v | /D Σ . W e define the following distance measure for non-con vex spaces. Definition 2. A set Σ wil l b e c al le d τ -b est if, for any u, v ∈ Σ , ther e exist p oints z 1 , . . . , z τ − 1 such that [ u, z 1 ] , [ z τ − 1 , v ] , and [ z i , z i +1 ] for i = 1 , . . . , τ − 2 ar e al l in Σ ; i.e., any two p oints in Σ c an b e c onne cte d by τ line se gments that ar e al l inside Σ . W e define the distanc e e d Σ ( u, v ) = inf z 1: τ − 1 ∈ Σ d Σ ( u, z 1 ) + d Σ ( z 1 , z 2 ) + · · · + d Σ ( z τ − 1 , v ) , and, by extension, the distanc e b etwe en two subsets Σ 1 , Σ 2 ⊂ Σ as e d Σ (Σ 1 , Σ 2 ) = inf u ∈ Σ 1 ,v ∈ Σ 2 e d Σ ( u, v ) . The analysis of the conductance is often derived via an isop erimetric ine quality . Theorem 7 (Theorem 4.5 of V empala (2005)) . L et Ω b e a c onvex b o dy in R n . L et h : Ω → R + b e an arbitr ary function. L et (Ω 1 , Ω 2 , Ω 3 ) b e any p artition of Ω into me asur able sets. Supp ose that for any p air of p oints x ∈ Ω 1 and y ∈ Ω 2 and any p oint z on the chor d of Ω thr ough x and y , h ( z ) ≤ (1 / 3) min (1 , d Ω ( x, y )) . Then v ol (Ω 3 ) ≥ E Ω ( h ) min( v ol (Ω 1 ) , v ol (Ω 2 )) , wher e the exp e ctation is define d with r esp e ct to the uniform distribution on Ω . Giv en an isop erimetric inequality , a total v ariation inequalit y is typically used in a mixing time analysis to low er b ound cross-ratio distances and then low er bound the conductance. Our approach is similar. W e use the embedding assumption to deriv e an isop erimetric inequality in the non-conv ex space Σ . Then we relate cross-ratio distance d Ω to distance e d Σ . This approximation is go o d when the p oints are sufficien tly far from the b oundary . W e incur a small error in the mixing b ound by ignoring p oin ts that are to o close to the b oundary . Finally we use the curv ature condition to deriv e a total v ariation inequalit y and to lo wer b ound the conductance. 3.2 Cross-Ratio Distances The first step is to show the relationship b etw een cross-ratio distances in the conv ex and non-conv ex spaces. W e show that these distances are close as long as p oints are far from the b oundary . These results will be used in the pro of of the main theorem in Section 3.4 to obtain an isop erimetric inequalit y in the non-conv ex space. First we define a useful quantit y . Definition 3. Consider a c onvex set Ω with some subset Ω 0 and c ol line ar p oints { a, x, b } with a, b ∈ ∂ Ω , x ∈ Ω 0 , and | x − b | ≤ | x − a | . L et c b e a p oint on ∂ Ω . L et R ( a, x, b, c ) = | x − b | / | x − c | . W e use R (Ω , Ω 0 ) to denote the maximum of R ( a, x, b, c ) over al l such p oints. W e use R to denote R (Ω , Ω ) . The following lemma is the main tec hnical lemma, and we use it to express e d Σ in terms of d Ω . 5 Lemma 8. L et b e a p ositive sc alar such that R (1 + 8 R ) ≥ 2 / 3 . L et { a, x 1 , x 2 , b } b e c ol line ar such that a and b ar e on the b oundary of Ω , x 1 , x 2 ∈ Ω , and | x 1 − a | < | x 2 − a | . L et c and d b e two p oints on the b oundary of Ω . Then | b − a | | a − x 1 | · | x 1 − c | | c − d | · | d − x 2 | | x 2 − b | ≥ 1 4 R (1 + 2 R ) . Pr o of. Let A = | b − a | | x 1 − x 2 | | a − x 1 | | x 2 − b | , B = | c − d | | x 1 − x 2 | | c − x 1 | | x 2 − d | . W e pro ve the claim by proving that A/B ≥ 1 / (4 R (1 + 2 R )) . Case 1, | x 1 − b | ≤ | x 1 − a | : In this case, x 1 and x 2 are b oth on the line segmen t [( a + b ) / 2 , b ] . W e c onsider t wo cases. Case 1.1, | x 2 − d | ≤ | x 2 − b | : W e ha ve that | c − d | = | c − x 1 | + | x 1 − x 2 | + | x 2 − d | ≤ | c − x 1 | + | x 1 − b | + | x 2 − b | . (3) Because | x 1 − a | < | x 2 − a | b y the assumption of the lemma, we ha ve | x 2 − b | < | x 1 − b | . Also b ecause | x 1 − b | ≤ | x 1 − a | in Case 1, w e ha ve | x 1 − b | / | c − x 1 | ≤ R . Thus | x 2 − b | | c − x 1 | ≤ | x 1 − b | | c − x 1 | ≤ R . (4) By (3) and (4), | c − d | | c − x 1 | ≤ 1 + | x 1 − b | | c − x 1 | + | x 2 − b | | c − x 1 | ≤ 1 + R + | x 2 − b | | c − x 1 | ≤ 1 + 2 R . W e use also that b y definition of R | x 2 − b | ≤ R | x 2 − d | . This and the previous result lets us b ound B ≤ (1 + 2 R ) | x 1 − x 2 | | x 2 − d | , A ≥ | b − a | | x 1 − x 2 | R | a − x 1 | | x 2 − d | ≥ | x 1 − x 2 | R | x 2 − d | , and conclude A B ≥ 1 R (1 + 2 R ) ≥ 1 4 R (1 + 2 R ) . Case 1.2, | x 2 − d | > | x 2 − b | : Case 1.2.1, | c − x 1 | ≤ | x 2 − d | : W e ha ve that | x 2 − b | < | x 1 − b | ≤ R | x 1 − c | . Th us, A B ≥ | a − b | | x 1 − x 2 | B R | a − x 1 | | x 1 − c | = | a − b | R | a − x 1 | · | d − x 2 | | c − d | ≥ | d − x 2 | R | c − d | ≥ | d − x 2 | R ( | d − x 2 | + | x 2 − x 1 | + | x 1 − c | ) ≥ | d − x 2 | R ( | d − x 2 | + (1 + R ) | x 1 − c | ) = 1 R 1 + (1 + R ) | x 1 − c | | d − x 2 | ≥ 1 R (2 + R ) ≥ 1 4 R (1 + 2 R ) . 6 Case 1.2.2, | c − x 1 | > | x 2 − d | : As b efore, we b ound A and B separately: B ≤ | c − d | | x 1 − x 2 | | c − x 1 | | x 2 − b | ≤ | x 1 − x 2 | | x 2 − b | · | c − x 1 | + R | c − x 1 | + | x 2 − d | | c − x 1 | ≤ (2 + R ) | x 1 − x 2 | | x 2 − b | , and A = | b − a | | x 1 − x 2 | | a − x 1 | | x 2 − b | ≥ | x 1 − x 2 | | x 2 − b | . Putting these together, A B ≥ 1 2 + R ≥ 1 4 R (1 + 2 R ) , where the second inequalit y holds b ecause R (1 + 8 R ) ≥ 2 / 3 . Case 2, | x 1 − b | > | x 1 − a | and | x 2 − b | < | x 2 − a | : In this case, x 1 and x 2 are on opp osite sides of the p oin t ( a + b ) / 2 . Let M b e a p ositive constan t. W e will c ho ose M = 4 later. Case 2.1, | c − d | ≤ M | c − x 1 | : W e b ound B ≤ M | x 1 − x 2 | | x 2 − d | ≤ M R | x 1 − x 2 | | x 2 − b | and conclude A B ≥ | a − b | M R | a − x 1 | ≥ 1 M R ≥ 1 4 R (1 + 2 R ) . Case 2.2, | c − d | > M | c − x 1 | : Case 2.2.1, | c − d | ≤ M | a − b | : W e ha ve that A B ≥ 1 M R 2 ≥ 1 4 R (1 + 2 R ) . Case 2.2.2, | c − d | > M | a − b | : Let x 0 b e a p oin t on the line segment [ x 1 , x 2 ] . Let β 1 b e the angle b etw een line segments [ c, x 1 ] and [ x 1 , x 0 ] . W e write | c − x 0 | 2 = | x 1 − x 0 | 2 + | x 1 − c | 2 − 2 | x 1 − c | · | x 1 − x 0 | cos β 1 ≤ 1 M 2 | c − d | 2 + 1 M 2 | c − d | 2 + 2 M 2 | c − d | 2 = 4 M 2 | c − d | 2 . By the triangle inequalit y , | d − x 0 | ≥ | c − d | − | c − x 0 | ≥ 1 − 2 M | c − d | . Let β 2 b e the angle b etw een line segments [ d, x 2 ] and [ x 2 , x 0 ] . Let w = 1 − 2 / M . W e write w 2 | c − d | 2 ≤ | d − x 0 | 2 = | x 2 − x 0 | 2 + | x 2 − d | 2 − 2 | x 2 − d | · | x 2 − x 0 | cos β 2 ≤ 1 M 2 | c − d | 2 + | x 2 − d | 2 + 2 M | d − x 2 | · | c − d | . 7 Th us, | x 2 − d | 2 + 2 M | d − x 2 | · | c − d | + 4 M − 3 M 2 − 1 | c − d | 2 ≥ 0 , whic h is a quadratic inequalit y in | x 2 − d | . Th us it holds that | x 2 − d | ≥ − 1 M + 2 M − 1 | c − d | . If we choose M = 4 , then | x 2 − d | ≥ 0 . 25 | c − d | and B ≤ 4 | x 1 − x 2 | | x 1 − c | ≤ 4 R | x 1 − x 2 | | x 1 − a | , yielding A B ≥ | a − b | 4 R | b − x 2 | ≥ 1 4 R ≥ 1 4 R (1 + 2 R ) . Finally , observ e that Case 3 follo ws by symmetry from Case 1. The following lemma states that the distance d Ω do es not increase by adding more steps. Lemma 9. L et a, y 1 , y 2 , . . . , y m , b b e in the c onvex b o dy Ω such that the p oints { a, y 1 , y 2 , . . . , y m , b } ar e c ol line ar. F urther assume that a, b ∈ ∂ Ω . W e have that d Ω ( y 1 , y 2 ) + · · · + d Ω ( y m − 1 , y m ) ≤ d Ω ( y 1 , y m ) . Pr o of. W e write d Ω ( y 1 , y m ) = | a − b | | y 1 − y m | | a − y 1 | | y m − b | = | a − b | | y 1 − y 2 | | a − y 1 | | y m − b | + | a − b | | y 2 − y 3 | | a − y 1 | | y m − b | + · · · + | a − b | | y m − 1 − y m | | a − y 1 | | y m − b | ≥ | a − b | | y 1 − y 2 | | a − y 1 | | y 2 − b | + | a − b | | y 2 − y 3 | | a − y 2 | | y 3 − b | + · · · + | a − b | | y m − 1 − y m | | a − y m − 1 | | y m − b | = d Ω ( y 1 , y 2 ) + · · · + d Ω ( y m − 1 , y m ) . The next lemma upper b ounds e d Σ in terms of d Ω . Lemma 10. L et x 1 , x 2 ∈ Ω . W e have that e d Σ ( g ( x 1 ) , g ( x 2 )) ≤ 4 L 2 Σ L 2 Ω R (1 + 2 R ) d Ω ( x 1 , x 2 ) . Pr o of. First we prov e the inequality for the case that g ( x 1 ) ∈ view ( g ( x 2 )) . Let a, b ∈ ∂ Ω b e suc h that the p oin ts { a, x 1 , x 2 , b } are collinear. Let c, d ∈ Ω b e p oints suc h that the p oin ts { g ( c ) , g ( x 1 ) , g ( x 2 ) , g ( d ) } are collinear and the line connecting g ( c ) and g ( d ) is inside Σ . By the Lipsc hitzity of g and g − 1 and Lemma 8, e d Σ ( g ( x 1 ) , g ( x 2 )) = | g ( c ) − g ( d ) | | g ( x 1 ) − g ( x 2 ) | | g ( c ) − g ( x 1 ) | | g ( x 2 ) − g ( d ) | ≤ L 2 Σ L 2 Ω | c − d | | x 1 − x 2 | | c − x 1 | | x 2 − d | ≤ L 2 Σ L 2 Ω 4 R (1 + 2 R ) | a − b | | x 1 − x 2 | | a − x 1 | | x 2 − b | 8 = 4 L 2 Σ L 2 Ω R (1 + 2 R ) d Ω ( x 1 , x 2 ) . (5) No w consider the more general case where g ( x 1 ) / ∈ view ( g ( x 2 )) . Find a set of points y 1 , . . . , y τ suc h that the line segments [ g ( x 1 ) , g ( y 1 )] , [ g ( y 1 ) , g ( y 2 )] , . . . , [ g ( y τ ) , g ( x 2 )] are all inside Σ . By definition of e d Σ , (5) , and Lemma 9, e d Σ ( g ( x 1 ) , g ( x 2 )) can b e upp er b ounded by inf u 1: τ − 1 ∈ Σ d Σ ( g ( x 1 ) , u 1 ) + d Σ ( u 1 , u 2 ) + · · · + d Σ ( u τ − 1 , g ( x 2 )) ≤ d Σ ( g ( x 1 ) , g ( y 1 )) + d Σ ( g ( y 1 ) , g ( y 2 )) + · · · + d Σ ( g ( y τ − 1 ) , g ( x 2 )) ≤ 4 L 2 Σ L 2 Ω R (1 + 2 R )( d Ω ( x 1 , y 1 ) + d Ω ( y 1 , y 2 ) + · · · + d Ω ( y τ − 1 , x 2 )) ≤ 4 L 2 Σ L 2 Ω R (1 + 2 R ) d Ω ( x 1 , x 2 ) 3.3 T otal V ariation Inequality In this section, we show that if t wo p oints u, v ∈ Σ are close to each other, then P u and P v are also close. First we show that if the t wo p oints are close to eac h other, then they ha ve similar views. Lemma 11 (Ov erlapping Views) . Given the curvatur e κ define d in Assumption 3, for any u, v ∈ Σ such that | u − v | ≤ 0 ≤ , P u ( { x : x / ∈ view ( v ) } ) ≤ max 4 π , κ sin( π / 8) 0 . The proof is in App endix A. Next we define some notation and show some useful inequalities. F or u ∈ Σ , let w b e a random p oint obtained b y making one step of Hit-and-Run from u . Define F ( u ) b y P ( | w − u | ≤ F ( u )) = 1 / 8 . If d ( u, ∂ Σ) ≥ h , less than 1 / 8 of any chord passing through u is inside B ( u, h/ 16) . Th us P ( | u − w | ≤ h/ 16) ≤ 1 / 8 , which implies F ( u ) ≥ h 16 . (6) In tuitively , the total v ariation inequalit y implies that if u and v are close geometrically , then their prop osal distributions must b e close as well. Lemma 12. L et u, v ∈ Σ b e two p oints that se e e ach other. L et 0 = 6 min π 4 , sin( π / 8) κ . Supp ose that d Σ ( u, v ) < 24 D Σ and | u − v | < min 2 F ( u ) √ n , 0 . Then, | P u − P v | < 1 − 8 e 4 D Σ . The pro of is in Appendix A. The proof uses ideas from pro of of Lemma 9 of Lo v ász (1999). The pro of of Lo v ász (1999) heavily relies on the conv exit y of the space, which do es not hold in our case. W e ov ercome the difficulties using the lo w curv ature assumption and the fact that u and v are sufficien tly far from the b oundary . 3.4 Putting Everything T ogether Next we b ound the conductance of Hit-and-Run . 9 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 width of spiral arms 0 2000 4000 6000 8000 10000 number of transitions RRT Hit-and-Run 0 5 10 0 5 10 RRT samples 0 5 10 0 5 10 Hit-and-Run samples Figure 2: Position only planning example Lemma 13. L et δ = 9 r 320 e 4 nL Ω D Σ , G = 1 6 min π 4 , sin( π / 8) κ , 0 = 9 r 20 n , N = 9 r 80 nL 2 Σ L 3 Ω R 0 (1 + 2 R 0 ) , wher e r is the r adius of b al l Ω (so r n π n = 1 ). The c onductanc e Φ of Hit-and-Run is at le ast δ 4 2 5 nD Ω ∧ N 1 24 D Σ ∧ 2 √ n 1 8 √ n ∧ G . The pro of is in App endix A. In proving this lemma, the non-conv exity of Σ is sp ecially troubling when p oin ts are close to the b oundary . W e o vercome this difficult y by using the isop erimetric inequality shown in Theorem 7, which is in terms of a verage distances instead of minimum distances. This enables us to ignore p oin ts that are very close to the b oundary . If we treat L Σ , L Ω , κ as constants and collect all constants in C , we hav e a Φ ≥ C /n 3 lo wer b ound for the conductance. Now we are ready to pro ve the main theorem. Pr o of of The or em 5. Using Lemma 6 and Lemma 13, d tv ( σ t , σ ) ≤ √ M (1 − C 2 / (2 n 6 )) t , whic h giv es the final b ound after rearrangement. 4 Planning This section mak es an empirical argumen t for use of the Hit-and-Run in tra jectory planning. In the first of tw o experiments, the state space is a p osition vector constrained to some map illustrated b y the b ottom plots of Figure 2. The second exp eriment also includes tw o dimensions of velocity in the state and limits state transitions to those that respect the map as well as kinematics and requires the planning to con trol the system explicitly (by sp ecifying an acceleration v ector for every time step). W e will sho w that Hit-and-R un outp erforms RR T in both cases by requiring few er transitions to reach the goal state across a wide v ariety of map difficulties. 4.1 P osition only The state starts at the b ottom left of the spiral and the goal is the top righ t. Both algorithms are implemented as describ ed in the introduction. The num b er of tranitions needed to reach the goal of both algorithms is plotted as a function of the width of the spiral arms; the larger the width, the easier the problem. The results are presen ted in Figure 2. The top plot sho w the num b er of transitions needed by b oth algorithms as the width of the arms c hanges, a veraged ov er 500 independent runs. W e see that the Hit- and-R un outp erforms RR T for all but the hardest problems, usually b y a large margin. The t w o lo wer plots sho w the sample points pro duced from one run with width equal to 1.2; we see that RR T has more uniform cov erage, but that Hit-and-Run has a large speedup o ver linear sections, therefore justifying its faster exploration. 10 0.5 1 1.5 2 2.5 3 3.5 4 width of path 500 1000 1500 2000 Number of transitions RRT Hit-and-Run 0 5 10 0 5 10 RRT samples 0 5 10 0 5 10 Hit-and-Run samples Figure 3: Performance under kinematic constrain ts RR T is slow in this problem b ecause in many rounds the tree does not grow in the right direction. F or example at the b eginning the tree needs to gro w up wards, but most random samples will bias the growth to righ t. As Hit-and-Run only considers the space that is visible to the current p oint, it is less sensitive to the geometry of the free space. W e can mak e this problem arbitrarily hard for RR T b y making the middle part of the spiral fatter. Hit-and-R un , on the other hand, is insensitive to such changes. A dditionally , the gro wth of the RR T tree can become very slo w tow ards the end. This is b ecause the rest of the tree absorbs most samples, and the tree gro ws only if the random p oint falls in the vicinity of the goal. 4.2 Kinematic Planning In this set of sim ulations, w e constrain the state transitions to adhere to the la ws of ph ysics: the state propagates forward under kinematics until it exits the p ermissible map, in which case it stops inelastically at the b oundary . The position map is the t wo-turn corridor, illustrated in the bottom plots of Figure 3. Both algorithms prop ose p oints to in the analogous manner to the previous section (where a desired sp eed is sampled in addition to a desired p osition); then, the b est acceleration vector in the unit ball is calculated and the sample is propagated forw ard by the kinematics. If the sample p oint encounters the b oundary , the v elo city is zero ed. Both RR T and Hit-and-R un are constrained to use the same con troller and the only difference is what points are prop osed. W e see that Hit-and-Run again outp erforms RR T across a large gamut of path widths by as m uch as a factor of three. The b ottom tw o plots are of a t ypical sample path, and w e see that Hit-and-R un has tw o adv antages: it accelerates do wn straigh t hallw ays, and it samples more uniformly from the state space. In con trast, RR T wastes many more samples along the b oundaries. 5 Conclusions and F uture W ork This pap er has t wo main con tributions. First, we use a measure-preserving bilipsc hitz map to extend the analysis of the Hit-and-Run random walk to non-con vex sets. Mixing time b ounds for non-conv ex sets op en up many applications, for example non-con vex optimization via sim ulated annealing and similar methods. The second contribution of this pap er has b een to study one such application: the planning problem. In contrast to RR T, using Hit-and-R un for planning has stronger guaran tees on the num b er of samples needed and faster conv ergence in some cases. It also av oids the need for a sampling oracle for Σ , since it combines the search with an appro ximate sampling oracle. One drawbac k is that the sample paths for Hit-and-R un hav e no pruning and are therefore longer than the RR T paths. Hybrid approaches that yield short paths but also explore quic kly are a promising future direction. 11 References Y. Abbasi-Y adkori, J. Mo da yil, and Cs. Szep esv ari. Extending rapidly-exploring random trees for asymptoti- cally optimal anytime motion planning. In International Confer enc e on Intel ligent R ob ots and Systems (IR OS) , 2010. Karthek eyan Chandrasek aran, Daniel Dadush, and San tosh V empala. Thin partitions: Isop erimetric in- equalities and sampling algorithms for some nonconv ex families. In A CM-SIAM Symp osium on Discr ete A lgorithms (SOD A) , 2010. I. F onseca and G. P arry . Equilibrium configurations of defective crystals. Ar ch. R ational Me ch. Anal. , 120: 245–283, 1992. J. A. Griep en trog, W. Höppner, H-C. Kaiser, and J. Rehberg. A bi-lipsc hitz con tinuous, volume preserving map from the unit ball on to a cube. Note di Matematic a , 28:177–193, 2008. S. Karaman and E. F razzoli. Incremental sampling-based algorithms for optimal motion planning, 2010. Sertac Karaman and Emilio F razzoli. Sampling-based algorithms for optimal motion planning. International Journal of R ob otics R ese ar ch. , 30(7):846–894, 2011. Stev en M. LaV alle. Rapidly-exploring random trees: A new to ol for path planning. T echnical Rep ort TR 98-11, Computer Science Departmen t, Io wa State Univ ersity , 1998. Stev en M. LaV alle and James J. Kuffner Jr. Randomized kino dynamic planning. The International Journal of R ob otics R ese ar ch , 20(5), 2001. László Lov ász. Hit-and-run mixes fast. Mathematic al Pr o gr amming , 86(3):443–461, 1999. László Lov ász and Miklós Simonovits. Random walks in a conv ex b o dy and an improv ed volume algorithm. R andom Structur es and A lgorithms , 4(4):359–412, 1993. László Lo vász and San tosh V empala. Hit-and-run from a corner. SIAM Journal on Computing , 35(4): 985–1005, 2006. László Lovász and Santosh V empala. The geometry of logconcav e functions and sampling algorithms. R andom Structur es & A lgorithms , 30(3):307–358, 2007. R.L. Smith. Efficien t mon te-carlo pro cedures for generating p oints uniformly distributed ov er b ounded regions. Op er ation R ese ar ch , 32:1296–1308, 1984. San tosh V empala. Geometric random w alks: A survey . Combinatorial and Computational Ge ometry , 52, 2005. 12 v u z x y w x 0 y 0 α 1 α 2 α 2 α 3 α 3 β λ x 00 α 1 (a) The geometry used in Lemma 11. L L R v y 0 x 0 η λ h λ (b) The geometry used in Lemma 11. Figure 4: If t wo p oin ts are close to eac h other, they hav e similar views. A Pro ofs Pr o of of L emma 11. W e say a line segment L is not fully visible from a point x if there exists a point on the line segment that is not visible from x . W e denote this ev ent by L / ∈ view ( x ) . Let L b e a line segment c hosen by Hit-and-Run from u . So, as the next p oin t in the Marko v chain, Hit-and-R un chooses a p oint uniformly at random from L . W e kno w that P u ( { x : x / ∈ view ( v ) } ) ≤ P u ( { L : L / ∈ view ( v ) } ) , So it suffices to show P u ( { L : L / ∈ view ( v ) } ) ≤ max 4 π , κ sin( π / 8) 0 . (7) T o sample the line segment L , first we sample a random tw o dimensional plane con taining u and v , and then sample the line segment inside this plane. T o pro ve (7) , w e show that in any tw o dimensional plane con taining u and v , the ratio of in visible to visible region is b ounded b y max 4 π , κ sin( π / 8) 0 . Consider the geometry sho wn in Figure 4(a). Let H b e the intersection of ∂ Σ and a t w o dimensional plane containing u and v . F or a line ` and p oin ts q and u , we write [ q , `, u ] to denote that u and a small neigh b orho o d of q on H are on the opp osite sides of ` . F or example, in Figure 4(a), we hav e that [ x, ` ( v , x ) , u ] . Define a subset Q = { q ∈ H : ` ( v , q ) is tangent to H at q and [ q , ` ( v , q ) , u ] } . An y line ` ( v , q ) such that [ q , ` ( v , q ) , u ] creates some space that is visible to u and invisible to v . If Q is empty , then the entire H is in the view of v and P u ( { x : x / ∈ view ( v ) } ) = 0 .Otherwise, let x b e a member of Q . Let y ∈ H b e the closest point to x suc h that [ v , y ] is tangent to H at x . Let α 1 b e the angle betw een [ x, u ] and [ u, y ] , and let α 2 b e the angle b et ween [ y , v ] and [ y , u ] . Because | u − v | ≤ | v − z | ≤ | v − x | , α 1 + α 2 ≤ π / 2 . F urther, if the lengths of | u − v | and | v − x | are fixed, α 1 + α 2 is maximized when [ v , u ] is orthogonal to [ u, x ] . If x is the only mem b er of Q , then maxim um in visible angle is α 1 , which can b e b ounded as follows: sin α 1 ≤ sin( α 1 + α 2 ) ≤ | u − v | | v − x | ≤ | u − v | . Otherwise, assume Q has more members. The same upper b ound holds for members that are also on the line ` ( v , x ) . So next we consider mem b ers of Q that are not on the line ` ( v , x ) . Assume Q has only one such 13 mem b er and let x 0 b e that tangent p oint (see Figure 4(a). The same argumen t can b e rep eated if Q has more suc h mem b ers). W e consider t wo cases. Case 1: | v − x 0 | ≥ | v − y | . Let α 3 b e the angle b et ween [ v , x 0 ] and [ u, x 0 ] . If α 3 ≤ α 2 , then sin( α 1 + α 3 ) ≤ sin( α 1 + α 2 ) ≤ | u − v | . Otherwise, α 3 > α 2 . Consider point x 00 suc h that the angle b etw een [ u, x 0 ] and [ u, x 00 ] is α 1 . W e show that | v − x 00 | ≥ | v − x | b y con tradiction. Assume | v − x | > | v − x 00 | . Thus, | x 0 − x 00 | > | y − x | and | u − x | > | u − x 00 | . By law of sines, | x − y | / sin α 1 = | u − x | / sin α 2 and | x 00 − x 0 | / sin α 1 = | u − x 00 | / sin α 3 . Because | u − x | > | u − x 00 | and α 3 > α 2 , w e hav e that | u − x | / sin α 2 > | u − x 00 | / sin α 3 , and thus | x 00 − x 0 | / sin α 1 < | x − y | / sin α 1 . This implies | x 00 − x 0 | < | x − y | , a contradiction. Thus, sin( α 1 + α 3 ) ≤ | u − v | | v − x 00 | ≤ | u − v | | v − x | ≤ | u − v | . Next we consider the second case. Case 2: | v − x 0 | < | v − y | . Consider the arc on H from y to x 0 . Let y 0 b e the last p oint on this arc suc h that | v − y 0 | = | v − y | . Let η b e the change of angle b etw een the tangen t of H at y 0 and the tangent of H at x 0 (tangen ts are defined in clo ckwise direction), and let λ b e the angle b et ween [ v , y 0 ] and [ v , x 0 ] . Angle η is minimized when the tangent at y 0 is orthogonal to [ v , y 0 ] . Th us η ≥ π / 2 − λ . If λ < π / 4 , then η ≥ π / 4 . Angle λ is smallest when the arc from y 0 to x 0 c hanges with maxim um curv ature κ/ R H , i.e. it is a segment of a circle with radius R H /κ . Figure 4(b) sho ws this case, where R = R H /κ and L = | v − y 0 | . W e ha ve that sin( λ/ 2) sin( η / 2) ≥ h/L h/R = R L = R H κ | v − y | Th us, λ 2 ≥ sin( λ/ 2) ≥ R H κ | v − y | sin( η / 2) = sin( π / 8) R H κ | v − y | ≥ sin( π / 8) κ , where the last step follows by | v − y | ≤ R H . Thus λ ≥ λ 0 def = min π 4 , sin( π / 8) κ . So for every | u − v | / invisible region, we hav e at least λ 0 visible region. Thus, P u ( { x : x / ∈ view ( v ) } ) ≤ | u − v | λ 0 = max 4 π , κ sin( π / 8) | u − v | . Before proving Lemma 12, we show a useful inequality . Consider p oints u, v , w ∈ Σ that see each other. Let C b e the conv ex h ull of { a ( u, v ) , b ( u, v ) , a ( u, w ) , b ( u, w ) , a ( v , w ) , b ( v , w ) } . Let i and j b e distinct members of { u, v , w } . W e use a 0 ( i, j ) and b 0 ( i, j ) to denote the endpoints of ` C ( i, j ) that are closer to i and j , respectively . Because | a 0 ( i, j ) − b 0 ( i, j ) | is con vex combination of tw o line segments that are inside Σ , | a 0 ( i, j ) − b 0 ( i, j ) | ≤ D Σ . (8) Also [ a ( i, j ) , b ( i, j )] ⊂ [ a 0 ( i, j ) , b 0 ( i, j )] , and th us | a ( i, j ) − i | ≤ | a 0 ( i, j ) − i | and | b ( i, j ) − j | ≤ | b 0 ( i, j ) − j | . W e can write ` C ( i, j ) = | i − j | · | a 0 ( i, j ) − b 0 ( i, j ) | | a 0 ( i, j ) − i | · | j − b 0 ( i, j ) | 14 ≤ | i − j | · | a ( i, j ) − b ( i, j ) | | a ( i, j ) − i | · | j − b ( i, j ) | · | a 0 ( i, j ) − b 0 ( i, j ) | | a ( i, j ) − b ( i, j ) | ≤ D Σ ` Σ ( i, j ) d ( i, ∂ Σ) , (9) where the last inequalit y holds b ecause | a ( i, j ) − b ( i, j ) | ≥ d ( i, ∂ Σ) . Pr o of of L emma 12. Let A ⊂ Σ b e a measurable subset of Σ . W e prov e that P u ( A ) − P v ( A ) ≤ 1 − 8 e 4 D Σ . W e partition A into fiv e subsets, and estimate the probability of eac h of them separately: A 1 = { x ∈ A : | x − u | < F ( u ) } , A 2 = x ∈ A : ( x − u ) > ( u − v ) > 1 √ n | x − u | · | u − v | , A 3 = ( x ∈ A : | x − u | < 1 6 | u − a ( u, x ) | , or | x − u | < 1 6 | u − a ( x, u ) | ) , A 4 = { x ∈ A : x ∈ view ( u ) , x / ∈ view ( v ) } , S = A \ A 1 \ A 2 \ A 3 \ A 4 . The definition of F ( u ) immediately yields P u ( A 1 ) ≤ 1 / 8 . Now consider A 2 and let C b e the cap of the unit sphere centered at u in the direction of v , defined by C = { x : ( u − v ) > x ≥ 1 √ n | u − v |} . If x ∼ P u , then P ( x ∈ A 2 ) is bounded ab o ve by the probabilit y that a uniform random line through u in tersects C , which has probability equal to the ratio b et ween the surface of C and the surface of the half-sphere. A standard computation to show that this ratio is less than 1 / 6 , and hence P u ( A 2 ) ≤ 1 / 6 . The probability that x ∈ A 3 is at most 1 / 6 , since x is chosen from a segment of a chord of length at most | ` ( u, x ) | / 6 . Finally , to b ound P ( A 4 ) , we apply Lemma 11: P u ( x ∈ A : x ∈ view ( u ) , x / ∈ view ( v )) ≤ max 4 π , κ sin( π / 8) 0 ≤ 1 6 . The combined probability of A 1 , A 2 , A 3 , and A 4 is at most 1 / 8 + 1 / 6 + 1 / 6 + 1 / 6 < 3 / 4 . W e now turn to b ounding P u ( S ) and show that P u ( S ) ≤ 2 e 4 ( D Σ / ) P v ( S ) . Because p oints in S are visible from b oth u and v , b y (2) P v ( S ) = 2 nπ n Z S 1 ` Σ ( v , x ) | x − v | n − 1 . No w, any x ∈ S m ust resp ect the following | x − u | ≥ F ( u ) ≥ √ n 2 | u − v | , (10) ( x − u ) > ( u − v ) ≤ 1 √ n | x − u | · | u − v | , (11) | x − u | ≥ 1 6 | u − a ( u, x ) | , and (12) | x − u | ≥ 1 6 | u − a ( x, u ) | . (13) 15 p x u v j q=q' y z i p' Figure 5: Illustration for Lemma 12 pro of As illustrated in Figure 5, we define the p oints y = a ( u, v ) , z = a ( v , u ) , p = a ( u, x ) , q = a ( x, u ) , i = a ( v , x ) and j = a ( x, v ) with con vex hull C . Also let p 0 and q 0 b e the endpoints of ` C ( u, x ) . If p 0 = p and q 0 = q , we pro ceed with the argument in the pro of of Lemma 9 of Lo v ász (1999) to get the desired result. Otherwise, assume q 0 = q and p 0 is the intersection of the lines ` ( u, p ) and ` ( y , i ) . (See Figure 5. A similar argument holds when q 6 = q 0 .) F rom (12) and (13), we get that 2 | x − u | > 1 6 | p − q | . W e ha ve that | p − q | ≥ , and by (8), | p 0 − q 0 | ≤ D Σ . Thus | p 0 − q 0 | ≤ ( D Σ / ) | p − q | . Thus, 1 6 | p 0 − q 0 | ≤ 2 D Σ | x − u | . (14) T o relate P v ( S ) to P u ( S ) , we need to b ound | x − v | and ` ( x, v ) in terms of | x − u | and ` ( x, u ) : | x − v | 2 = | x − u | 2 + | u − v | 2 + 2( x − u ) > ( u − v ) ≤ | x − u | 2 + | u − v | 2 + 2 √ n | x − u | · | u − v | . . . By (11) ≤ | x − u | 2 + 4 n | x − u | 2 + 4 n | x − u | 2 . . . By (10) = 1 + 8 n | x − u | 2 . Th us, | x − v | ≤ 1 + 4 n | x − u | . (15) First we use conv exit y of C to b ound ` C ( x, v ) in terms of ` C ( x, u ) , and then we use (9) to b ound ` Σ ( x, v ) and 16 ` Σ ( x, u ) in terms of ` C ( x, v ) and ` C ( x, u ) . By Menelaus’ Theorem (wrt triangle uv x and transversal line [ y , i ] ), | x − i | | v − i | = | u − y | | v − y | · | x − p 0 | | u − p 0 | . W e ha ve that | u − y | | v − y | = 1 − | v − u | | v − y | > 1 − d C ( u, v ) , and thus | x − v | | v − i | = | x − i | | v − i | − 1 ≥ (1 − d C ( u, v )) | x − p 0 | | u − p 0 | − 1 = | x − u | | u − p 0 | 1 − d C ( u, v ) | x − p 0 | | x − u | > | x − u | | u − p 0 | 1 − d C ( u, v ) | p 0 − q 0 | | x − u | > | x − u | | u − p 0 | 1 − 12 D Σ 24 D Σ > 1 2 | x − u | | u − p 0 | , where we hav e used (14) and d C ( u, v ) = d Σ ( u, v ) < / (24 D Σ ) (the condition in the statement of the lemma); w e conclude that | v − i | < 2 | x − v | | x − u | | u − p 0 | . (16) Next we prov e a similar inequalit y for | v − j | . It is easy to c heck that | z − v | | u − z | = 1 − | u − v | | u − z | > 1 − d C ( u, v ) , and combining with Menelaus’ Theorem | v − j | | x − j | = | q 0 − u | | x − q 0 | · | z − v | | u − z | w e can show | x − v | | x − j | = | v − j | | x − j | − 1 ≥ (1 − d C ( u, v )) | q 0 − u | | x − q 0 | − 1 = | x − u | | x − q 0 | 1 − d C ( u, v ) | q 0 − u | | x − u | > | x − u | | x − q 0 | 1 − d C ( u, v ) | p 0 − q 0 | | x − u | > | x − u | | x − q 0 | 1 − 12 D Σ 24 D Σ > 1 2 | x − u | | x − q 0 | , 17 where we hav e used (14) and d C ( u, v ) = d Σ ( u, v ) < / (24 D Σ ) . Thus, | x − j | < 2 | x − v | | x − u | | x − q 0 | , and combining this with the trivial observ ation that | x − v | ≤ 2 | x − v | | x − u | | x − u | , and Equation 16 yields ` C ( x, v ) = | v − i | + | v − x | + | x − j | ≤ 2 | x − v | | x − u | ` C ( x, u ) . Th us, ` Σ ( x, v ) = ` C ( x, v ) ≤ 2 | x − v | | x − u | ` C ( x, u ) ≤ 2 D Σ | x − v | | x − u | ` Σ ( x, u ) . (17) Where the last step holds b y (9). Now we are ready to low er b ound P v ( S ) in terms of P u ( S ) . P v ( S ) = 2 nπ n Z S dx ` Σ ( x, v ) | x − v | n − 1 ≥ nπ n D Σ Z S | x − u | dx ` Σ ( x, u ) | x − v | n . . . By (17) ≥ nπ n D Σ 1 + 4 n − n Z S dx ` Σ ( x, u ) | x − u | n − 1 . . . By (15) ≥ 2 e 4 D Σ P u ( S ) . Finally , P u ( A ) − P v ( A ) ≤ P u ( A ) − P v ( S ) ≤ P u ( A ) − 2 e 4 D Σ P u ( S ) ≤ P u ( A ) − 2 e 4 D Σ P u ( A ) − 3 4 = 3 8 e 4 D Σ + 1 − 2 e 4 D Σ P u ( A ) ( a ) ≤ 3 8 e 4 D Σ + 1 − 4 8 e 4 D Σ = 1 − 8 e 4 D Σ . In the step (a), we used the fact that D Σ ≥ and P u ( A ) ≤ 1 . Pr o of of L emma 13. Let { S 1 , S 2 } b e a partitioning of Σ . Define Σ 1 = { x ∈ S 1 : P x ( S 2 ) ≤ δ } , Σ 2 = { x ∈ S 2 : P x ( S 1 ) ≤ δ } , Σ 3 = Σ \ Σ 1 \ Σ 2 . 18 Case 1: vol (Σ 1 ) ≤ vol ( S 1 ) / 2 . W e ha ve that Z S 1 P x ( S 2 ) dx ≥ Z S 1 \ Σ 1 P x ( S 2 ) dx ≥ δ vol ( S 1 \ Σ 1 ) ≥ δ 2 v ol ( S 1 ) . Th us, 1 min { v ol ( S 1 ) , v ol ( S 2 ) } Z S 1 P x ( S 2 ) dx ≥ δ 2 . Case 2: vol (Σ 1 ) > vol ( S 1 ) / 2 and vol (Σ 2 ) > vol ( S 2 ) / 2 . Similar to the argument in the previous case, Z S 1 P x ( S 2 ) ≥ δ vol ( S 1 \ Σ 1 ) , and Z S 1 P x ( S 2 ) = Z S 2 P x ( S 1 ) ≥ δ vol ( S 2 \ Σ 2 ) . Th us, Z S 1 P x ( S 2 ) ≥ δ 2 v ol (Σ \ Σ 1 \ Σ 2 ) = δ 2 v ol (Σ 3 ) . Let Ω i = g − 1 (Σ i ) for i = 1 , 2 , 3 . Define ( u ( x ) , v ( x )) = argmin u ∈ Ω 1 ,v ∈ Ω 2 , { u,v ,x } are collinear d Ω ( u, v ) , h ( x ) = (1 / 3) min(1 , d Ω ( u ( x ) , v ( x ))) . By definition, h ( x ) satisfies condition of Theorem 7. Let = r 2 n and notice that v ol (Ω ) ≥ vol (Ω) / 2 . W e ha ve that Z S 1 P x ( S 2 ) ≥ δ 2 v ol (Ω 3 ) ≥ δ 2 E Ω ( h ( x )) min( v ol (Ω 1 ) , v ol (Ω 2 )) = δ 4 E Ω ( h ( x )) min( v ol (Σ 1 ) , v ol (Σ 2 )) . Let x ∈ Ω . W e consider tw o case s. In the first case, | u ( x ) − v ( x ) | ≥ / 10 . Thus, d Ω ( u ( x ) , v ( x )) ≥ 4 D Ω | u ( x ) − v ( x ) | ≥ 2 5 nD Ω . In the second case , | u ( x ) − v ( x ) | < / 10 , then | u ( x ) − x | ≤ / 10 and | v ( x ) − x | ≤ / 10 . Thus, u, v ∈ Ω 0 for 0 = 9 / 10 . Thus by Assumption 2, g ( u ) , g ( v ) ∈ Σ 00 for 00 = 9 / (10 L Ω ) . By Lemma 10, d Ω ( u ( x ) , v ( x )) ≥ e d Σ ( g ( u ( x )) , g ( v ( x ))) 4 L 2 Σ L 2 Ω R 0 (1 + 2 R 0 ) . Next we low er b ound e d Σ ( g ( u ) , g ( v )) . If g ( u ) and g ( v ) cannot see each other, then e d Σ ( g ( u ) , g ( v )) ≥ 8 00 /D Σ . Next we assume that g ( u ) and g ( v ) see each other. Because g ( u ) ∈ Σ 1 and g ( v ) ∈ Σ 2 , d tv ( P g ( u ) − P g ( v ) ) ≥ 1 − P g ( u ) ( S 2 ) − P g ( v ) ( S 1 ) ≥ 1 − 2 δ = 1 − 00 8 e 4 D Σ . Lemma 12, applied to g ( u ) , g ( v ) ∈ Σ 00 , gives us that d Σ ( g ( u ) , g ( v )) ≥ 00 24 D Σ or | g ( u ) − g ( v ) | ≥ 2 √ n min 2 F ( g ( u )) √ n , G 00 . By (6), F ( g ( u )) ≥ 00 / 16 . W e get the desired low er b ound by taking a minimum ov er all cases. 19
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment