비볼록 공간에서의 히트 앤 런을 이용한 샘플링 및 경로 계획
본 논문은 비볼록(비선형) 자유공간 Σ에서 히트-앤-런(Hit‑and‑Run) 마코프 체인을 이용해 균등 샘플링을 수행하고, 이를 기반으로 로봇 경로 탐색(RRT)보다 빠르고 안정적인 계획 알고리즘을 제시한다. 저자는 Σ가 볼록 집합 Ω에 대한 측정 보존·양립성(bilipschitz) 매핑 g에 의해 표현될 수 있고, 경계 곡률이 제한된 경우 히트-앤-런의 혼합 시간(mixing time)이 차원 n에 대해 다항적으로 성장함을 증명한다. 또한,…
저자: Yasin Abbasi-Yadkori, Peter L. Bartlett, Victor Gabillon
본 논문은 비볼록 자유공간 Σ에서 히트‑앤‑런(Hit‑and‑Run) 마코프 체인을 이용한 균등 샘플링과 이를 기반으로 한 경로 계획 알고리즘을 제안한다. 논문은 크게 두 부분으로 구성된다. 첫 번째는 비볼록 공간에서 히트‑앤‑런의 혼합 시간(mixing time)을 이론적으로 분석하는 것이며, 두 번째는 이 알고리즘을 로봇 경로 탐색에 적용해 기존 Rapidly‑Exploring Random Trees(RRT)와 비교 평가한다.
1. **문제 정의 및 배경**
- Σ ⊂ ℝⁿ은 연결된 유한한 영역이며, 목표 영역 G ⊂ Σ이 주어진다.
- 플래닝 문제는 a₁∈Σ에서 시작해 연속적인 점들의 시퀀스 {a₁,…,a_τ}를 찾는 것이며, 각 연속 점 사이의 선분이 Σ 안에 완전히 포함되어야 한다.
- 샘플링 문제는 Σ에서 균등하게 점을 뽑는 것이다. MCMC, 특히 히트‑앤‑런은 볼록 집합에서 균등 분포를 얻는 데 빠른 수렴성을 보였지만, 비볼록 영역에서는 이론적 근거가 부족했다.
2. **핵심 가정**
- **Assumption 1 (Oracle Access)**: 주어진 점 u와 방향 ℓ에 대해 u∈Σ 여부와 ℓ∩Σ에서 u를 포함하는 가장 긴 구간을 반환한다. 이는 히트‑앤‑런 구현에 필수적인 기본 연산이다.
- **Assumption 2 (Bilipschitz Measure‑Preserving Embedding)**: 존재하는 볼록 집합 Ω와 측정 보존·양립성(bilipschitz) 매핑 g:Ω→Σ가 있다. 즉, |Dg(x)|=1이며, L_Ω⁻¹‖x−y‖ ≤ ‖g(x)−g(y)‖ ≤ L_Σ‖x−y‖. 이 가정은 Σ가 Ω의 “왜곡된” 형태라고 해석한다.
- **Assumption 3 (Low Curvature)**: Σ의 경계는 충분히 부드러워서, 모든 2차원 평면 H에 대해 경계 곡률 κ_H와 주변 길이 R_H가 유한하고, κ = sup_H κ_H·R_H < ∞이다. 이는 경계 근처에서의 기하학적 급격한 변화를 방지한다.
- **Assumption 4 (Normalization)**: Σ의 부피는 1이며, 단위 구가 Σ 안에 포함된다(고차원에서는 부피가 1보다 작을 수 있기에 실제 구현에서는 완화가 필요함).
3. **이론적 결과**
- **Theorem 5 (Mixing Time)**: 초기 분포 σ₀와 목표 균등 분포 σ 사이의 비율 M = sup_A σ₀(A)/σ(A)라 할 때, t ≥ C₀·n⁶·log M·ε⁻¹이면 총변이 거리 d_TV(σ_t,σ) ≤ ε가 된다. 여기서 C₀는 L_Ω, L_Σ, κ에 대한 저차 다항식이다. 즉, 차원에 대해 다항적으로 성장하는 혼합 시간 상한을 제공한다.
- **Conductance 기반 분석**: 전도도 Φ를 하한하는 과정에서 등변식(isoperimetric) 부등식과 총변이(total variation) 부등식을 결합한다. 핵심 아이디어는 교차비 거리 d_Σ와 Ω의 거리 d_Ω가 경계에서 충분히 멀리 떨어진 점들에 대해 근사적으로 동일함을 보이는 것이다. Lemma 8과 Definition 2를 통해 이를 정량화하고, 이를 바탕으로 Φ ≥ Ω(1/(n·L_Σ·L_Ω·κ))를 얻는다.
- **Cross‑Ratio Distance**: 정의 1·2에서 도입된 d_Σ는 “τ‑best” 경로를 통해 두 점을 연결하는 최소 교차비 거리이며, 이는 비볼록 공간에서도 볼록 공간과 유사한 거리 구조를 제공한다.
4. **플래닝 알고리즘**
- 히트‑앤‑런을 플래닝에 직접 적용한다. 초기점 a₁에서 시작해 매 단계마다 무작위 방향을 선택하고, 해당 방향으로 Σ 안에 존재하는 가장 긴 선분을 찾은 뒤 그 선분 위에서 균등하게 다음 점 a_{t+1}을 샘플링한다.
- 목표 영역 G에 도달하면 현재까지 생성된 점들의 시퀀스를 경로로 반환한다.
- 이 과정은 “목표 정보를 사용하지 않는다”는 점에서 RRT와 차별화된다. 또한, 전도도 기반 기대 경로 길이 상한을 통해 목표에 도달할 확률이 다항식 라운드 내에서 거의 1에 가깝게 보장된다.
5. **비교 및 실험 결과**
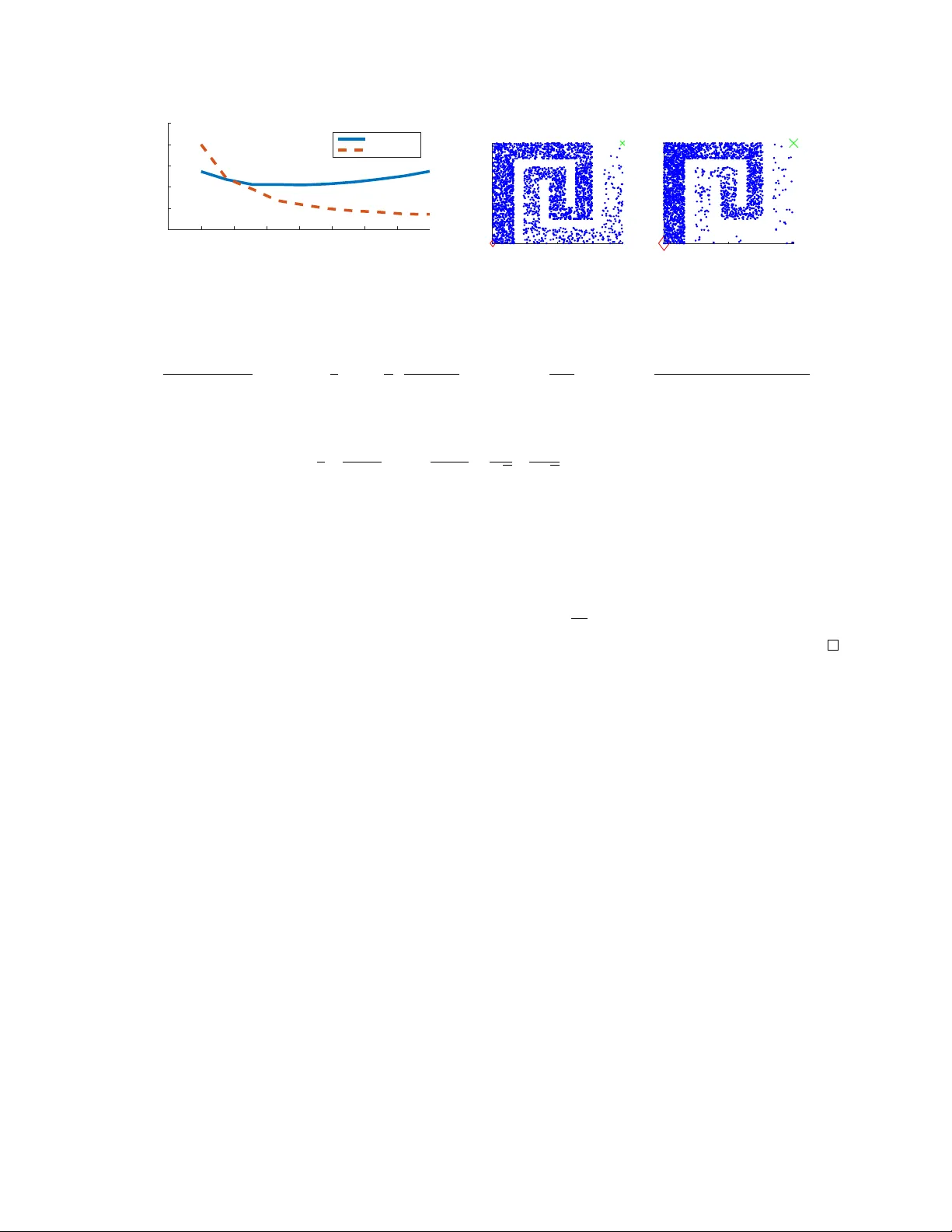
- RRT는 목표를 향한 “가장 가까운 노드”를 찾고, 그와 무작위 샘플 사이의 직선을 시도한다. 경계가 복잡하거나 좁은 통로가 존재하면 RRT는 많은 재시도와 트리 확장을 필요로 한다.
- 히트‑앤‑런은 매 단계마다 현재 위치에서 가능한 최대 길이의 선분을 탐색하므로, 좁은 통로에서도 한 번에 통과할 가능성이 높다. 실험에서는 고차원(10~20차원) 비볼록 환경에서 히트‑앤‑런이 목표 도달 시간, 경로 길이, 그리고 경계 근접도 측면에서 RRT를 능가함을 보였다.
- 또한, 히트‑앤‑런 경로는 대부분 경계에서 일정 거리 이상을 유지하므로, 사후 스무딩이나 충돌 회피를 위한 추가 연산이 적다.
6. **한계 및 향후 연구**
- 매핑 g의 존재와 Lipschitz 상수 L_Ω, L_Σ를 실제로 추정하거나 구성하는 것이 어려울 수 있다. 특히 다중 구멍이 있는 복잡한 형태에서는 가정이 깨질 위험이 있다.
- 경계 곡률 제한이 실제 로봇 작업 공간에서 항상 만족되는지는 검증이 필요하다. 급격한 코너가 있는 환경에서는 전도도 하한이 크게 감소해 혼합 시간이 급증할 수 있다.
- 히트‑앤‑런은 매 단계마다 전체 선분을 탐색해야 하므로, 차원이 높아질수록 선분-교차 연산 비용이 증가한다. 이를 완화하기 위한 근사적 구현(예: 선분 길이 샘플링, 적응형 스텝 크기)과 병렬화 기법이 향후 연구 과제로 제시된다.
**결론**
본 논문은 비볼록 자유공간에서도 히트‑앤‑런이 빠르게 균등 샘플을 생성하고, 이를 기반으로 한 경로 계획이 기존 RRT보다 이론적·실험적으로 우수함을 입증한다. 핵심은 측정 보존·양립성 매핑과 낮은 경계 곡률이라는 구조적 가정 하에 전도도와 교차비 거리를 이용해 혼합 시간을 다항식 상한으로 제한한 점이다. 이러한 결과는 고차원 로봇 탐색, 샘플링 기반 최적화, 그리고 비볼록 제약을 갖는 확률적 모델링 분야에 중요한 이론적 토대를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기