On the stability of $phi$-uniform domains
We study two metrics, the quasihyperbolic metric and the distance ratio metric of a subdomain $G \subset {\mathbb R}^n$. In the sequel, we investigate a class of domains, so called $\varphi$-uniform domains, defined by the property that these two met…
Authors: R. Klén, Y. Li, S. K. Sahoo
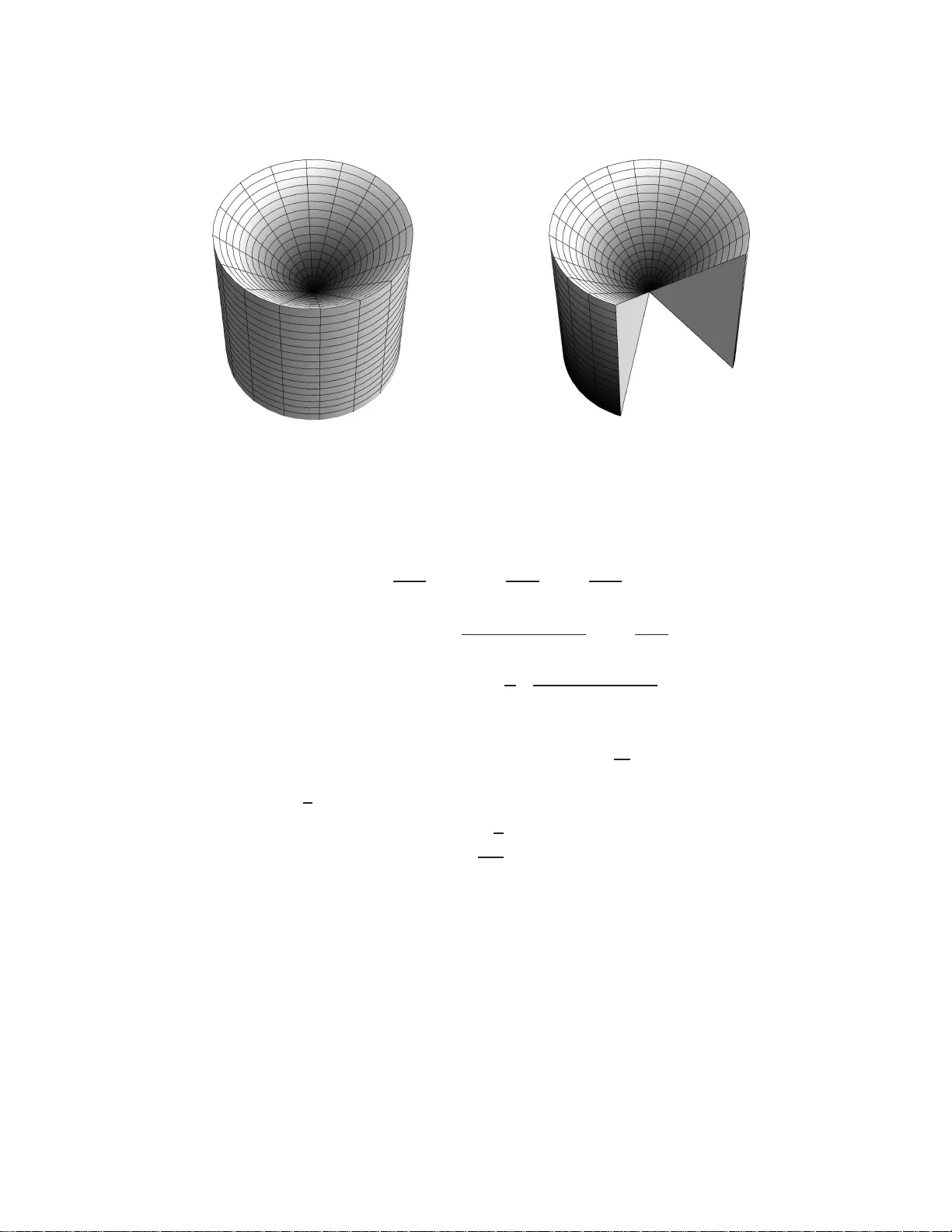
ON THE ST ABILITY OF ϕ -UNIFORM DOMAINS R. KL ´ EN, Y. LI, S.K. SAHOO, AND M. VUORINEN Abstract. W e study t wo metrics, the quasih yp erb olic metric and the dis ta nce ratio metric of a sub domain G ⊂ R n . In the sequel, we in v estigate a clas s of doma ins , so called ϕ -unifor m domains, d efined by t he prop erty th at these tw o metr ics are compara ble wit h resp ect to a homeomorphism ϕ from [0 , ∞ ) to itself. Finally , we discuss a num ber of stabilit y prop erties of ϕ -uniform domains. In pa rticular, we show that the cla ss of ϕ - unifor m domains is stable in the sense that remov al o f a geometric sequence of p oints fr o m a ϕ -uniform domain yields a ϕ 1 -uniform domain. 1. Introduction F or a sub domain G R n and x, y ∈ G the distanc e r atio metric j G is defined by j G ( x, y ) = log 1 + | x − y | min { δ G ( x ) , δ G ( y ) } , where δ G ( x ) denotes the Euc lidean distance from x to ∂ G . Sometimes w e abbreviate δ G b y writing just δ . The ab o v e form of the j G metric, in tro duced in [14], is obtained b y a sligh t mo dification o f a metric that w a s studied in [3, 4]. The quasihyp erb olic m etric of G is defined b y the quasihy p erb olic length minimizing pro p ert y k G ( x, y ) = inf γ ∈ Γ( x,y ) ℓ k ( γ ) , ℓ k ( γ ) = Z γ | dz | δ G ( z ) , where Γ( x, y ) represen ts the f a mily of a ll rectifiable paths joining x and y in G , a nd ℓ k ( γ ) is the quasih yp erb olic length of γ (cf. [4]). F or a giv en pa ir of p oints x, y ∈ G, the infimum is alwa ys attained [3], i.e., there alw ays exists a quasih yp erb olic geo desic J G [ x, y ] whic h minimiz es the ab ov e in tegral, k G ( x, y ) = ℓ k ( J G [ x, y ]) and furthermore w ith the property that the distance is additive on the geo desic: k G ( x, y ) = k G ( x, z ) + k G ( z , y ) for all z ∈ J G [ x, y ] . If the domain G is emphasized w e call J G [ x, y ] a k G -geo desic. In this pap e r, sometimes w e also use the terminology distanc e for the term metric . The follo wing w ell- known prop e rties of the ab ov e t w o metrics a r e use ful in this paper. (i) F or x, y ∈ G R n , w e ha v e k G ( x, y ) ≥ j G ( x, y ) [4]; (ii) Monotonicit y prop erty: if G 1 and G 2 are domains, with G 2 ⊂ G 1 R n , then for all x, y ∈ G 2 w e hav e k G 1 ( x, y ) ≤ k G 2 ( x, y ) . It is ob vious that this prop ert y holds for the distance ratio metric j G as w ell. In 1979, Martio a nd Sarv as in tro duced the class of unifo rm domains [10]. 2010 Mathematics S u bje ct Classific ation. Pr imary 3 0 F45; Secondary 30C65 . Key wor ds and ph r ases. Uniform co ntin uit y , mo dulus o f con tinuit y , th e qua sihyperb olic metr ic, the distance ratio metric j , unifor m domains, ϕ -uniform domains, quasiconv ex domains, remov abilit y . File: klsv120611 .tex, prin ted: 2018-10 -30, 14.47 1 2 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN Definition 1.1. A domain D in R n is said to b e c -uniform if there exists a constant c with the prop ert y that each pair of po in ts z 1 , z 2 in D can b e joined by a rectifiable arc γ in D satisfying (cf. [10, 12]) (1) min j =1 , 2 ℓ ( γ [ z j , z ]) ≤ c δ D ( z ) for all z ∈ γ , and (2) ℓ ( γ ) ≤ c | z 1 − z 2 | , where ℓ ( γ ) denotes the arclength of γ , γ [ z j , z ] the part o f γ b et ween z j and z . Also, w e sa y that γ is a uniform ar c . A domain is said to b e uniform if it is c - uniform for some constan t c > 0. In the same y ear, Gehring a nd Osgo o d [3] c haracterized uniform domains in terms of an upp er b ound for the quasih yp erb olic metric as follo ws: a do ma in G is uniform if and only if there exists a constant C ≥ 1 suc h that (1.2) k G ( x, y ) ≤ C j G ( x, y ) for all x, y ∈ G . As a matter of f a ct, t he ab o v e inequ alit y app e ared in [3] in a f orm with an additiv e constant on the rig h t ha nd side: it w as show n by V uo rinen [14, 2.50] that the additiv e constan t can b e c hosen to b e 0. This observ ation leads to the definition o f ϕ -uniform domains in tro duced in [14]. Definition 1.3. Let ϕ : [0 , ∞ ) → [0 , ∞ ) b e a homeomorphism. A domain G R n is said to b e ϕ -uniform if k G ( x, y ) ≤ ϕ ( | x − y | / min { δ ( x ) , δ ( y ) } ) for all x, y ∈ G . In the sequel, V¨ ais¨ al¨ a has also in ve stigated this class of domains [12] (see also [13] and references therein). He also p oin ted out that these t wo classes o f domains a r e same provided ϕ is a slow function. W e mak e sure that , in this pap er, we use the terminology c -unif o rm for constan ts c , and frequen tly use ψ - unif o rm, ϑ -uniform and ϕ -unifo rm for functions ψ , ϑ , ϕ . In Section 2, we in tro duce notation and preliminary results that we need in the latter sections. The structure of the rest of the sections cov ers mainly on ϕ -uniform domains. In Section 3, w e construct sev eral examples of ϕ -uniform domains and compare with t heir complemen tary domains and with quasicon ve x domains. W e also pro v e that the image domain of a ϕ -uniform domain under bilipsch itz mappings of R n is ψ -uniform, where ψ is dep ending on ϕ and t he bilipsc hitz constant. In Section 4, we prese n t our main results (e.g. see Theorems 4.8 and 4.23) on ϕ -unifo rm domains in the f o llo wing form: Theorem. L et G b e a ϕ -uniform domain i n R n . L et B b e a b al l with 2 B ⊂ G . Supp ose that E is a c omp act subset of B such that R n \ E is ψ -uniform. Then G \ E is ϑ -uniform, wher e ϑ dep ends only on ϕ a n d ψ . Note that one of our pro ofs in v olve s a con trol function of a fixed parameter on whic h ϑ also dep ends. Idea b ehind this is to obtain v ar ious other stabilit y prop erties of ϕ -uniform domains to use as preparatory results to prov e t he main theorems in the ab ov e t yp e. In particular, it is show n that the class o f ϕ -uniform domains is stable in the sense that remo v al of a geometric sequence of p oints from a ϕ -uniform domain leads to a ϕ 1 -uniform domain. ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 3 2. Not a tion and Preliminar y res ul ts W e shall now sp ecify some necessary not ation, definitions and facts that w e frequen tly use in this pap er. The standard unit v ectors in the Euclidean n -space R n ( n ≥ 2) are represen ted b y e 1 , e 2 , . . . , e n . W e write x ∈ R n as a v ector ( x 1 , x 2 , . . . , x n ). The Euclidean line segmen t joining p oin t s x and y is denoted b y [ x, y ]. F or x, y , z ∈ R n , the smalle st angle a t y b etw een the v ectors x − y and z − y is denoted b y ∡ ( x, y , z ). The one p oint compactification of R n (so-called the M¨ obius n -space) is defined b y R n = R n ∪ { ∞ } . W e denote b y B n ( x, r ) and S n − 1 ( x, r ), t he Euclidean ball and sphere with radius r cen tered at x respective ly . W e set B n ( r ) := B n (0 , r ) and S n − 1 ( r ) := S n − 1 (0 , r ). Let G b e a domain ( o p en connected non-empt y set) in R n . The b oundary , closure and diameter of G are denoted b y ∂ G , G and diam G resp ectiv ely . In what f o llo ws, all paths γ ⊂ G a r e required to be r ectifiable, i.e. ℓ ( γ ) < ∞ where ℓ ( γ ) stands for the Euclide an length of γ . Giv en x, y ∈ G , Γ( x, y ) stands for the collection of a ll rectifiable paths γ ⊂ G joining x and y . W e no w for mulate some ba sic results on quasih yp erb o lic distances whic h are indeed used latter in Section 3. The follo wing lem ma is established in [14]. Lemma 2.1. Define a ( θ ) = 1 + (2 / θ ) + π / 2 log 2 + 2 θ 2 + θ , for θ ∈ (0 , 1) . L et G R n b e a domai n . If x, y , z ∈ G with x, y ∈ G \ B n ( z , θ δ G ( z )) , then k G \{ z } ( x, y ) ≤ a ( θ ) k G ( x, y ) . It is se en from Lemma 2.1 that a ( θ ) is w ell-defined for θ = 1. Ho w ev er, the metho d of the pro of do es not giv e any guarantee to obtain the same v alue o f a ( θ ) when θ = 1. Lemma 2.2. If r > 0 and x, y ∈ G = R n \ B n ( r ) with | x | = | y | , then k G ( x, y ) ≤ | x | | x | − r k R n \{ 0 } ( x, y ) ≤ | x − y | π 2( | x | − r ) . Pr o of. The first inequalit y follows from [6, Theorem 5.20]. F or the sec ond inequalit y we see that if θ = ∡ ( x, 0 , y ), then w e ha v e the iden tit y | x − y | 2 = | x | 2 + | y | 2 − 2 | x | | y | cos θ . Since | x | = | y | it follo ws that sin( θ / 2) = | x − y | / (2 | x | ) . F or 0 ≤ θ ≤ π , the w ell-know n inequalit y θ ≤ π sin ( θ / 2) giv es that θ ≤ π | x − y | / (2 | x | ). Since k R n \{ 0 } ( x, y ) ≤ θ , when | x | = | y | , we conclude the second ineq ualit y . Lemma 2.3. F or r ∈ [ 1 4 , 1) , we define a ( r ) = 4 r +2 4 r − 1 + 2 log 2+2 r 2+ r . L et D b e a pr op er sub domain of R n . If x, y , z ∈ D with y , z ∈ D \ B n ( x, r δ D ( x )) , E = { x } ∪ { x k } ∞ k =1 wher e { x k } ∞ k =1 ∈ B n ( x, δ D ( x )) is a se quenc e of p oin ts satisfying x k ∈ [ x, x k − 1 ) an d | x − x k | = 1 2 k +2 δ D ( x ) , then k D \ E ( y , z ) ≤ a ( r ) k D ( y , z ) . Pr o of. Let D 1 = D \ E , and δ D denote the Euclidean distance to the bo undary of D . Observ e first that if r ∈ ( 1 4 , 1) a nd w ∈ D \ B n ( x, r 2 δ D ( x )), then (2.4) δ D ( w ) ≤ 4 r + 2 4 r − 1 δ D 1 ( w ) , 4 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN where the inequalit y ho lds b ecause of t he following. If δ D ( w ) = δ D 1 ( w ) , then (2.4) holds trivially . If δ D ( w ) > δ D 1 ( w ) , then there e xists some p oin t p ∈ E suc h that δ D 1 ( w ) = | w − p | ≥ | w − x | − | x − p | ≥ r 2 − 1 8 δ D ( x ) . Hence δ D ( w ) ≤ δ D ( x ) + | x − p | + | p − w | ≤ 4 r + 2 4 r − 1 δ D 1 ( w ) . Let γ b e a quasih yp erb olic geo desic joining z and y in D and let U = γ ∩ B n ( x, r 2 δ D ( x )) . W e consider tw o cases. Case I: U 6 = ∅ . Let z ′ b e the first p oin t in U when w e trav erse along γ from z to y . The p oint y ′ in U is the first p oin t when we trav erse f r om y to z . Let T b e a 2-dimensional linear subs pace of E con taining x , y ′ and z ′ . The n y ′ and z ′ divide the circle T ∩ S n − 1 ( x, r 2 δ D ( x )) in to t w o arcs, denote the shorter arc (whic h ma y b e a sem icircle) b y α . Then (2.4) yields k D 1 ( y , y ′ ) ≤ Z γ [ y ,y ′ ] | dw | δ D 1 ( w ) ≤ 4 r + 2 4 r − 1 Z γ [ y ,y ′ ] | dw | δ D ( w ) = 4 r + 2 4 r − 1 k D ( y , y ′ ) , and k D 1 ( y ′ , z ′ ) ≤ π . Hence, the inequalities k D 1 ( y , z ) ≤ k D 1 ( y , y ′ ) + k D 1 ( y ′ , z ′ ) + k D 1 ( z ′ , z ) ≤ 4 r + 2 4 r − 1 k D ( y , y ′ ) + π + 4 r + 2 4 r − 1 k D ( z , z ′ ) ≤ 4 r + 2 4 r − 1 k D ( z , y ) + 4 together with k D ( y , z ) = Z γ [ y ,z ] | dw | δ D ( w ) ≤ k D ( y , y ′ ) + k D ( z ′ , z ) ≤ log 1 + | y − y ′ | δ D ( y ′ ) + lo g 1 + | z − z ′ | δ D ( z ′ ) ≤ 2 log 1 + r 2 δ D ( x ) δ D ( x ) + r 2 δ D ( x ) ≤ 2 log 1 + r 1 + r 2 giv e k D 1 ( y , z ) ≤ 4 r + 2 4 r − 1 k D ( z , y ) + 4 ≤ 4 r + 2 4 r − 1 + 2 log( 1+ r 1+ r 2 ) k D ( y , z ) . Case II: U = ∅ . ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 5 By (2.4 ) we ha v e k D 1 ( y , z ) ≤ 4 r + 2 4 r − 1 k D ( y , z ) . W e finished the proof with a ( r ) = 4 r +2 4 r − 1 + 2 log 2+2 r 2+ r . Lemma 2.5. F or α, θ ∈ (0 , 1) , we d e fi ne a ( α, θ ) = 2 + θ + α θ θ (1 − α 2 ) + (1 + α ) π 2(1 − α ) log((2 + 2 θ ) / (2 + θ + αθ )) . If x, y , z ∈ G with x, y ∈ G \ B n ( z , θ δ G ( z )) , then k G ′ ( x, y ) ≤ a ( α, θ ) k G ( x, y ) , wher e G ′ = G \ B n ( z , α θ d ( z , ∂ G ) ) . Pr o of. Denote b y δ ( z ) = d ( z , ∂ G ). Fix β ∈ (0 , 1) a nd w ∈ G \ B n ( z , β δ ( z )). Cho ose q ∈ S n − 1 ( z , α β δ ( z )) and p ∈ ∂ G suc h that | w − q | = d ( w , S n − 1 ( z , α β δ ( z ))) and | p − z | = δ ( z ) . Then w e ha v e | w − q | ≥ β ( 1 − α ) δ ( z ) and he nce | p − q | ≤ (1 + α β ) δ ( z ) ≤ 1 + α β β (1 − α ) | w − q | . It follows b y the tr ia ngle inequality | w − p | ≤ | p − q | + | w − q | that (2.6) d ( w , ∂ G ) ≤ | w − p | ≤ 1 + 1 / β 1 − α d ( w , ∂ G ∪ S n − 1 ( z , α β δ ( z ))) . Let J b e a geo desic joining x and y in G (i.e. J = J G [ x, y ]) and U = J ∩ B n ( z , (1 + α ) θ δ ( z ) / 2). If U 6 = ∅ then we denote b y x ′ the first p o int in U , when w e tr a verse alo ng J fro m x to y . W e similarly define y ′ in U , but tra v ersing from y to x a lo ng J . By (2.6) and Lemma 2.2 k G ′ ( x, y ) ≤ k G ′ ( x, x ′ ) + k G ′ ( x ′ , y ′ ) + k G ′ ( y ′ , y ) ≤ 2 + θ + α θ θ (1 − α 2 ) k G ( x, x ′ ) + 1 + α 1 − α π + 2 + θ + α θ θ (1 − α 2 ) k G ( y ′ , y ) ≤ 2 + θ + α θ θ (1 − α 2 ) k G ( x, y ) + 1 + α 1 − α π . Since k G ≥ j G w e hav e k G ( x, y ) ≥ k G ( x, x ′ ) + k G ( y ′ , y ) ≥ 2 log 1 + θ − (1 + α ) θ / 2 1 + (1 + α ) θ / 2 = 2 log 2 + 2 θ 2 + θ + α θ and therefore k G ′ ( x, y ) ≤ a ( α, θ ) k G ( x, y ) holds for a ( α, θ ) = 2 + θ + α θ θ (1 − α 2 ) + (1 + α ) π 2(1 − α ) log((2 + 2 θ ) / (2 + θ + αθ )) . If U = ∅ , then by (2.6) k G ′ ( x, y ) ≤ 2 + θ + α θ θ (1 − α 2 ) k G ( x, y ) ≤ a ( α, θ ) k G ( x, y ) . The assertion follows. 6 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN Clearly Lemma 2.5 implie s Lemma 2.1 as α → 0. 3. Examples of ϕ -uniform domains In order to giv e examples of ϕ - uniform domains, consider domains G satisfying the following geometric prop erty [14, Examples 2.50 (1)]: there exists a constant C ≥ 1 such that eac h pair of p oints x, y ∈ G can b e joined by a rectifiable path γ ∈ G with ℓ ( γ ) ≤ C | x − y | and min { δ ( x ) , δ ( y ) } ≤ C d ( γ , ∂ G ). Then G is ϕ -unif o rm with ϕ ( t ) = C 2 t . In particular, ev ery con vex domain is ϕ -uniform with ϕ ( t ) = t . How ev er, in general, conv ex domains need not b e uniform. More complicated non trivial example s of ϕ -uniform domains can b e see n b y considering that of uniform domains whic h are extensiv ely studied by sev eral researc hers. F or ins tance, it is noted in [8] that complemen t a ry comp onents of quas im¨ obius (and hence bi-Lipsc hitz) spheres are uniform. Complemen tary domains. In this subsection w e understand R n \ D , for the terminolog y c omplementary domain of a domain D ⊂ R n . When w e talk ab out complemen t of a domain is another domain, w e mean in the sense of its complemen tary domain. Because simply connected uniform domains in plane are quasidisks [10] (see also [2]), it follo ws tha t t he complemen t of suc h a uniform domain a lso is uniform. A motiv ation to this observ atio n of uniform domains leads to in v estigate the comple men tary domains in the case of ϕ - uniform domains. In fact w e see from the follo wing examples that complemen tar y domains of ϕ 1 - uniform domains are not alwa ys ϕ - uniform for an y ϕ . The first example in v estigat es the matter in the case of half-strips. Example 3.1. Since the half-strip defined b y S = { ( x, y ) ∈ R 2 : x > 0 , − 1 < y < 1 } is con ve x, b y the abov e discussion w e observ e that it is ϕ -uniform with ϕ ( t ) = t . On the other hand, by considering the p oints z n = ( n, − 2) and w n = ( n, 2) w e see t ha t G := R 2 \ S is not a ϕ -uniform do ma in. Indeed, w e hav e j G ( z n , w n ) = log 5 and fo r some m ∈ R ∩ J G [ z n , w n ] k G ( z n , w n ) ≥ k G ( m, w n ) ≥ log 1 + | m − w n | δ ( w n ) ≥ log(1 + n ) → ∞ as n → ∞ . This sho ws that G is not ϕ -uniform for any ϕ . △ The ab ov e example giv es a con vex ϕ -uniform domain whose complemen t is not ψ - uniform for an y ψ . W e can construct a n um b er of examples of ϕ 1 -uniform domains, whose complemen t is not a ϕ - uniform for any ϕ , by suitable c hanges in the shap e of the b oundaries of the con v ex domains of ab o v e t yp e. F o r instance, we hav e the following example whic h pro vides a ϕ - uniform domain (not con v ex) whose complemen t is not ψ -uniform for any ψ . Example 3.2. Define D m = ( x, y ) ∈ R 2 : | x | < 1 1 + log m , 0 < y < me 10 . It is clear b y [14, 2.5 0] that t he domain D = S ∞ m =1 D m is ϕ -uniform with ϕ ( t ) = 2 t . On the other hand, a similar reasoning explained in Example 3.1 g ives that its complemen t G ′ = R 2 \ D , is no t ψ -unifo r m fo r a n y ψ (see F igure 1 ). △ W e see tha t the ϕ -uniform domains considered in the ab ov e t wo examples are un b ounded, whic h generally asks the fo llowing problem: ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 7 D G ′ = R 2 \ D Figure 1. An unbounded ϕ -unifor m domain (not conv ex) D ⊂ R 2 whose complemen t G ′ = R 2 \ D is not ψ -uniform for any ψ . Figure 2. A b ounded ϕ -uniform domain whose compleme n tar y domain is not ψ -unifo rm fo r an y ψ . ( The authors thank P. H¨ as t¨ o a nd one of the r efer e es w ho have given the ide a of this domain . ) Problem 3.3. Are there an y bounded ϕ 1 -uniform domains whose comple men tary domains are not ϕ -unifo r m fo r a n y ϕ ? The sp ecialit y in dimension 2, for Problem 3.3, is muc h more delicate. Indee d, one can handle this matter b y considering the domain by pulling thinner a nd thinner rectangles fro m one edge of a rectangle (e.g. see Figure 2). In this setting, one can ev en similarly find Jordan domains which are ϕ -uniform but their complemen ts are not ψ -uniform for any ψ . But w e a r e not studying detail on it in this paper. Ho w ev er, it is sometimes in teresting to see example s in higher dimensional setting. In three dimensional s etting, w e now provid e solutions to Problem 3 .3 as follows : Example 3.4. Let T b e the triangle with v ertices (1 , − 1), (0 , 0) and (1 , 1). Consider the domain D b ounded b y the surface of rev o lution g enerated b y rev olving T ab out the v ertical axis (see Figure 3 ). Then w e see that D is ϕ 1 -uniform for some ϕ 1 (in fact, D is unifor m !). Indeed, let x, y ∈ D b e arbitrary . Without loss of generalit y we a ssume that | x | ≥ | y | . Consider the path γ = [ x, x ′ ] ∪ C jo ining x and y , where x ′ ∈ S 1 ( | y | ) is chos en so that | x ′ − x | = d ( x, S 1 ( | y | )); and C is the smaller circular arc of S 1 ( | y | ) joining x ′ to y . F or z ∈ D , we write δ ( z ) := d ( z , ∂ D ). 8 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN Figure 3. A b ounded ϕ 1 -uniform domain in R 3 whose complemen tary domain is not ϕ - uniform (the right hand side figure sho ws the revolution). Then for all x, y ∈ D we hav e k D ( x, y ) ≤ Z γ | dz | δ ( z ) = Z [ x,x ′ ] | dz | δ ( z ) + Z C | dz | δ ( z ) ≤ | x − y | min { δ ( x ) , δ ( y ) } + Z C | dz | δ ( z ) ≤ 1 + π 2 | x − y | min { δ ( x ) , δ ( y ) } , where the last inequalit y follows by the fact t hat ℓ ( C ) ≤ π | x − y | / 2 (see the pro of of Lemma 2.2). On the other hand, its complemen tary domain G = R 3 \ D is not ϕ - uniform for any ϕ . This can b e easily seen b y the c hoice z t = te 2 ∈ G , 0 < t < 1. Indeed, we ha ve j G ( − z t , z t ) = log(1 + 2 √ 2); and a similar a rgumen t as in Ex ample 3.1 leads k G ( − z t , z t ) ≥ log 1 + √ 2 t → ∞ as t → 0. The assertion follows. △ Example 3.4 provide s a bounded ϕ -unifo rm doma in in R 3 whic h is not simply connected. In the following, w e construct a b ounded simply connected domain in R 3 whic h is ϕ -unifo r m but its complemen t is not. Example 3.5. Fix h = 1 / 3. F or the sak e of con v enience, w e denote the coor dinate axes in R 3 b y x -, y - and z - axes. Let D b e a domain obtained b y rotating the tria ngle with v ertices (0 , 0 , h ), (1 , 0 , 0) and (0 , 0 , − h ) around the z -axis. F or each k ≥ 1, w e let x k = 1 − 4 − k and h k = (1 − x k ) / (10 h ) . W e no w mo dify the b oundary of D as follows : let us drill the cavit y of D f r o m tw o opp osite directions of z -axis suc h t ha t the drilling a xis, parallel to z -axis, go es through the ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 9 Figure 4. A double cone domain with t wo-sided drillings. The right hand side picture provides a sc hematic view of the simply connected domain G ⊂ R 3 constructed in Example 3.5. The left hand side picture is a cross section of G . The domain G is uniform but its complemen t is not ϕ - uniform for an y ϕ . p oin t ( x k , 0 , 0 ). F ro m the p ositiv e direction w e drill until the tip of the drill is at the heigh t h k and f rom the opp osite direc tion w e drill up to the height − h k . The cross section ( see the left hand side o f Figure 4) of the upp er conical surface will ha ve its tip at ( x k , y k ) describ ed b y y − h k = A ( x − x k ) , A = ± 1 . This in tersects the b oundary of the ca vit y represen ted b y z = h (1 − x ) at x = h − h k + Ax k A + h . This giv es u k = x | A = − 1 = h − h k − x k − 1 + h and v k = x | A =1 = h − h k + x k 1 + h . Ob viously , u k ≤ x k ≤ v k . Since v k ≤ u k +1 , w e see that tw o successiv e drilling do not interfere. Induction on k giv es us a new domain G ⊂ R 3 whic h is simply connected a nd uniform, but its complemen t is not ϕ - uniform for any ϕ . Indeed, the c hoice of p oints z k = ( x k , 0 , 2 h k ) and w k = ( x k , 0 , − 2 h k ) in U = R 3 \ G g iv es that d ( z k , ∂ U ) = min { x k − u k , v k − x k } = h k f ( h ) . It follows that j U ( z k , w k ) = log 1 + 4 h k h k f ( h ) < ∞ . On the other hand, k U ( z k , w k ) ≥ log 1 + √ 1 + h 2 d ( z k , ∂ U ) ! = log 1 + √ 1 + h 2 h k f ( h ) ! → ∞ as k → ∞ . This sho ws that U is not ϕ -uniform for a ny ϕ . △ 10 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN • • • • • • • • • • • • • • • • • • • • • • • • • • • • • G Figure 5. A qu asicon ve x planar do main G whic h is not ϕ unifor m for any ϕ . Quasicon v ex domains. A domain G ⊂ R n is said to b e quasic onve x if there exists a constant c > 0 suc h that ev ery pair of p oin ts x, y ∈ G can b e joined b y a rectifiable pat h γ ⊂ G satisfying ℓ ( γ ) ≤ c | x − y | . W e observ e that the domains G and G ′ resp ectiv ely in Examples 3.1 a nd 3.2 are not quasicon v ex and are not b ounded to o. This naturally leads to the following problems. Problem 3.6. Is it true that quasicon v ex domains are ϕ -unifo r m and vice ve rsa? W e ha ve a partial solution to Problem 3.6, whic h is describ ed in the follo wing example. This sho ws that there ex ist quasicon v ex domains whic h are not ϕ -uniform for a n y ϕ . Example 3.7. Start out with a construction of a finite p oin t set on the b oundary of t he unit square Q = [ − 1 , 1] × [ − 1 , 1]. F or a fixed integer m > 2, w e put on ∂ Q so many ev enly spaced p oin ts with distance 2 d , their unio n is E , suc h that for ev ery p oint in w ∈ R 2 \ Q w e hav e k R 2 \ E (0 , w ) > m . Then obv iously it is enough to choose d suc h that (3.8) k R 2 \ E (0 , w ) ≥ k R 2 \ E (0 , p ) ≥ log | p | dist ( p, E ) ≥ log(1 /d ) > m , where p is the p o in t o f in tersection of ∂ Q and the geo desic segmen t fro m 0 to w in R 2 \ E . W e sa y that suc h a set E is of type m . No w w e c ho ose sequence of sets E m , m = 1 , 2 , 3 , . . . suc h tha t eac h se t is via a similarity transformation (i.e. a function f of the form | f ( x ) − f ( y ) | = c | x − y | ) equiv alen t to a set of t yp e m , and that the sets b ehav e as in Figure 5 (i.e. con verge to a corner of the square and are linked with eac h other at the corner points and that diameter o f E m is c √ 22 − m , where c is the constan t o f similarit y transformation). W e denote G := Q \ ∪ ∞ m =1 { E m } . Let w m b e the cen ter of the square, on whose b oundary , the p oin ts o f E m are lo cated. Then | w m − w m +1 | min { δ G ( w m ) , δ G ( w m +1 ) } = c √ 2(2 − m + 2 − ( m +1) ) ( c 2 − m − 1 ) / 2 = 6 √ 2 , while b y a similar argumen t as in (3.8) we get k G ( w m , w m +1 ) ≥ k R 2 \ E m ( w m , w m +1 ) > m . Th us, G is not ϕ -uniform for a ny ϕ but clearly it is quasicon vex . △ Op en problem 3.9. Do es there exist a simply connected quasicon v ex planar domain whic h is not ϕ - uniform for an y ϕ ? ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 11 Bilipsc hitz Prop er ty . It is w ell-kno wn that uniform domains are prese rv ed under bilips- c hitz mappings (see for instance [15, p. 37]). W e now extend this property to the class o f ϕ -uniform domains. Prop osition 3.10. L et f : R n → R n b e an L -bilipsc h itz ma pping, that is | x − y | /L ≤ | f ( x ) − f ( y ) | ≤ L | x − y | for al l x , y ∈ R n . I f G R n is ϕ -uniform, then f ( G ) is ϕ 1 -uniform with ϕ 1 ( t ) = L 2 ϕ ( L 2 t ) . Pr o of. W e denote δ ( z ) := d ( z , ∂ G ) a nd δ ′ ( w ) := d ( w , ∂ f ( G ) ). Since f is L -bilipsc hitz, it follo ws t hat δ ( z ) /L ≤ δ ′ ( f ( z )) ≤ L δ ( z ) for all z ∈ G . Also, w e ha v e the fo llowing well-kno wn relation (see for instance [1 5 , p. 37]) k G ( x, y ) /L 2 ≤ k f ( G ) ( f ( x ) , f ( y )) ≤ L 2 k G ( x, y ) for all x, y ∈ G . Hence, ϕ -uniformity of G yie lds k f ( G ) ( f ( x ) , f ( y )) ≤ L 2 k G ( x, y ) ≤ L 2 ϕ ( | x − y | / min { δ ( x ) , δ ( y ) } ) ≤ L 2 ϕ ( L 2 | f ( x ) − f ( y ) | / min { δ ′ ( f ( x )) , δ ′ ( f ( y )) } ) . This concludes our claim. A mapping h : R n → R n defined b y h ( x ) = a + r 2 ( x − a ) | x − a | 2 , h ( ∞ ) = a, h ( a ) = ∞ is called an inversion in the sphere S n − 1 ( a, r ) for x, a ∈ R n and r > 0. W e recall the follo wing w ell-know n iden tit y from [15, (1.5)] (3.11) | h ( x ) − h ( y ) | = r 2 | x − y | | x − a | | y − a | , x, y ∈ R n \ { a } . W e next sho w that ϕ - uniform domains ar e preserv ed under inv ersion in a sphere. Corollary 3.12. L et z 0 ∈ R n and R > 0 b e arbitr ary. Denote by h an inversion in S n − 1 ( z 0 , R ) . F or 0 < m < M , if G ⊂ B n ( z 0 , M ) \ B n ( z 0 , m ) is a ϕ -uniform domain, then h ( G ) is ϕ 1 -uniform with ϕ 1 ( t ) = ( M /m ) 2 ϕ ( M 2 t/m 2 ) . Pr o of. W e denote δ ( z ) := d ( z , ∂ G ) and δ ′ ( w ) := d ( w , ∂ h ( G )). Without loss o f generality we can assume that z 0 = 0 . By the ass umption on G w e see t hat m ≤ | z | ≤ M for all z ∈ G . Hence, b y the identit y (3 .11) w e ha v e R 2 | x − y | / M 2 ≤ | h ( x ) − h ( y ) | ≤ R 2 | x − y | /m 2 whic h implies R 2 min { δ ( x ) , δ ( y ) } / M 2 ≤ min { δ ′ ( h ( x ) , δ ′ ( y )) } ≤ R 2 min { δ ( x ) , δ ( y ) } /m 2 . It follows that ( m/ M ) 2 k G ( x, y ) ≤ k h ( G ) ( h ( x ) , h ( y )) ≤ ( M /m ) 2 k G ( x, y ) for all x, y ∈ G . Since G is ϕ - unifo rm, b y a similar argumen t as in the pro of of Prop osition 3.10 w e conclude o ur a ssertion. 12 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN 4. St ability proper tie s of ϕ - unif orm dom ains V arious classes of domains ha v e been studied in analysis (e.g. see [5]). F or some class es, the remo v al of a finite num b er of p oin ts from a do main may yield a domain no longer in this class [5]. Here we will in v estigate cases when this do es not happ en, i.e. t he remov al of a finite n umber of p oin t s results a domain of t he same class. Theorem 4.1. F or a fix e d θ ∈ (0 , 1) , c onsider the function a ( θ ) define d as in L em m a 2 . 1 . I f G R n is a ϕ 1 -uniform domain and z 0 ∈ G , then G \ { z 0 } is ϕ -uniform for s o me ϕ dep ending on ϕ 1 only. Mor e over, we have ϕ ( t ) = 2 max π log 3 log(1 + 3 t ) , a ( θ / 4) ϕ 1 (3 t ) . Pr o of. In this pro of we denote b y δ 1 the Euclidean distance to the b oundary o f G and δ 2 the Euclidean distance to that of G \ { z 0 } . Fix θ ∈ (0 , 1) and let x, y ∈ G \ { z 0 } b e arbitr a ry . W e pro v e the theorem by considering three cases. Case I: x, y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 2) \ { z 0 } . W e see that k G \{ z 0 } ( x, y ) = k R n \{ z 0 } ( x, y ) ≤ π log 3 j R n \{ z 0 } ( x, y ) ≤ π log 3 j G \{ z 0 } ( x, y ) , where the equalit y follows (see [9, page 38]) from the fact tha t z 0 is t he closest p oin t for the geo desics J G [ x, y ] = J G \ z 0 [ x, y ] whic h ar e logarithmic spirals (or circular arcs) in B n ( z 0 , θδ 1 ( z 0 ) / 2) a nd the second inequality is due to Lind ´ en [7, Theorem 1.6]. It follows that (4.2) k G \{ z 0 } ( x, y ) ≤ ϕ 2 ( | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) for ϕ 2 ( t ) = π log 3 log(1 + t ). Case II: x, y ∈ G \ B n ( z 0 , θδ 1 ( z 0 ) / 4). Since G is ϕ 1 -uniform, using Lem ma 2.1 we obta in k G \{ z 0 } ( x, y ) ≤ a ( θ / 4) k G ( x, y ) = a ( θ / 4) ϕ 1 ( | x − y | / min { δ 1 ( x ) , δ 1 ( y ) } ) ≤ a ( θ / 4) ϕ 1 ( | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) , where the last ine qualit y holds b ecause δ 1 ≥ δ 2 . This giv es that (4.3) k G \{ z 0 } ( x, y ) ≤ ϕ 3 ( | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) with ϕ 3 ( t ) = a ( θ/ 4) ϕ 1 ( t ). Case III: x ∈ B n ( z 0 , θδ 1 ( z 0 ) / 4) \ { z 0 } and y ∈ G \ B n ( z 0 , θδ 1 ( z 0 ) / 2) . There exists a quasih yp erb olic geo desic joining x and y that inters ects the b oundary of B n ( z 0 , θδ 1 ( z 0 ) / 4). Let an in tersecting p oint b e m . Along this g eo desic w e ha v e the follo wing equalit y (4.4) k G \{ z 0 } ( x, y ) = k G \{ z 0 } ( x, m ) + k G \{ z 0 } ( m, y ) . ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 13 No w, Case I and Case II resp ectiv ely giv e k G \{ z 0 } ( x, m ) ≤ ϕ 2 ( | x − m | / min { δ 2 ( x ) , δ 2 ( m ) } ) and k G \{ z 0 } ( m, y ) ≤ ϕ 3 ( | m − y | / min { δ 2 ( m ) , δ 2 ( y ) } ) . W e note t ha t max {| x − m | , | m − y |} ≤ 3 | x − y | and δ 2 ( m ) ≥ δ 2 ( x ). Also, ϕ 2 and ϕ 3 b eing monotone, from (4.4 ) we obtain k G \{ z 0 } ( x, y ) ≤ ϕ 2 (3 | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) + ϕ 3 (3 | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) ≤ 2 max { ϕ 2 (3 | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) , ϕ 3 (3 | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) } = ϕ 4 ( | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) } , where ϕ 4 ( t ) = 2 max { ϕ 2 (3 t ) , ϕ 3 (3 t ) } . W e v erified all the case s, and hence o ur conclusion ho lds with ϕ = ϕ 4 . Corollary 4.5. S upp ose that { z 1 , z 2 , . . . , z m } is a finite non -empty set of p oints in a do m ain G R n . If G is ϕ 0 -uniform, then G \ { z 1 , z 2 , . . . , z m } is ϕ -uniform for some ϕ dep ending on ϕ 0 , m and the distanc e min { d ( z i , ∂ G ) , | z i − z j |} with i 6 = j , i, j = 1 , 2 , . . . , m . Pr o of. As a consequence of Theorem 4.1, pro of follows b y induction o n m . Indeed, w e obtain ϕ ( t ) = 2 m a ( θ / 2) m − 1 max { π (1 + 3 t ) / log 3 , a ( θ / 2) ϕ 0 (3 t ) } , where θ = min { d ( z i , ∂ G ) , | z i − z j |} with i 6 = j and i, j = 1 , 2 , . . . , m . The follo wing prop erty of uniform domains, first noticed b y V¨ ais¨ al¨ a (see [11, Theorem 5.4]) in a differen t a pproac h, is a straightforw ard consequence o f Theorem 4.1. F or con v enient reference w e record the following Bernoulli inequality: (4.6) log(1 + at ) ≤ a log(1 + t ); a ≥ 1 , t ≥ 0 . Corollary 4.7. Supp o s e that { z 1 , z 2 , . . . , z m } is a finite non -empty set o f p oints in a uniform domain G R n . Then G ′ = G \ { z 1 , z 2 , . . . , z m } also is unif o rm . Mor e pr e cisely if (1 . 2) holds for G with some c onstant C , then it also ho l d s for G ′ with a c onstant C ′ dep ending on C and m . Pr o of. It is enough to conside r the domain G \ { z 1 } when (1 .2) holds fo r G with some constan t C . W e refer to the proof of Theorem 4.1. Our aim is to find a constan t C ′ suc h that k G \{ z 1 } ( x, y ) ≤ C ′ j G \{ z 1 } ( x, y ) . F rom Case I , w e ha v e C ′ = π / log 3. Since (1.2) holds for G with the constan t C , from Case II w e get C ′ = C a ( θ / 2). By Case I and Case II , w e see that k G \{ z 1 } ( x, y ) = k G \{ z 1 } ( x, m ) + k G \{ z 1 } ( m, y ) ≤ max { π / log 3 , C a ( θ / 2) } [ j G \{ z 1 } ( x, m ) + j G \{ z 1 } ( m, y )] ≤ C ′ j G \{ z 1 } ( x, y ) , where C ′ = 6 max { π / log 3 , C a ( θ / 2) } . Note that the last inequalit y follo ws b y similar rea- soning as in Case II I and b y the Bernoulli inequalit y (4 .6). Inductiv ely , w e notice that uniformity constan t for G ′ is 6 m a ( θ / 2) m − 1 max { π / log 3 , C a ( θ / 2) } = 6 m a ( θ / 2) m C , 14 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN where a ( θ ) is define d as in Lemma 2 .1 for θ ∈ (0 , 1). Theorem 4.8. L et θ ∈ (0 , 1) b e fixe d. Assume that G R n is ϕ 1 -uniform and z 0 ∈ G . If E ⊂ B n ( z 0 , θd ( z 0 , ∂ G ) / 5) is a non- e mpty cl o se d set such that R n \ E is ϕ 2 -uniform, then G \ E is ϕ -uniform for ϕ dep ending on ϕ 1 and ϕ 2 . Pr o of. In this pro of w e denote b y δ 1 , δ 2 and δ 3 the Euclidean distances to the boundary of G , G \ E a nd R n \ E resp ectiv ely . Let θ ∈ (0 , 1) and x, y ∈ G \ E be arbitra ry . W e sub divide the pro of into sev eral cases . Case A: x, y ∈ G \ B n ( z 0 , θδ 1 ( z 0 ) / 4). Denote G ′ as in Lemma 2 .5 but with α = 1 / 5. Then ϕ 1 -uniformit y of G g ives k G \ E ( x, y ) ≤ k G ′ ( x, y ) ≤ a (1 / 5 , θ / 4) k G ( x, y ) ≤ a (1 / 5 , θ / 4) ϕ 1 ( | x − y | / min { δ 1 ( x ) , δ 1 ( y ) } ) ≤ a (1 / 5 , θ / 4) ϕ 1 ( | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) , where the first inequalit y holds by the monotonicit y prop ert y , second inequalit y follows by Lemma 2.5 a nd last follo ws trivially . Case B: x, y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 2) \ E . If x, y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 4) \ E , then the quasih yp erb olic geo desic J := J G \ E [ x, y ] ma y en tirely lie in B n ( z 0 , θδ 1 ( z 0 ) / 3) or ma y in tersect the sph ere S n − 1 ( z 0 , θδ 1 ( z 0 ) / 3). This means that the shap e of J will dep end on t he shap e of E . So, we divide the case into tw o parts. Case B1: J ∩ S n − 1 ( z 0 , θδ 1 ( z 0 ) / 3) = ∅ . Note tha t for all z ∈ J , the closest boundary po in ts to z are in E , and t h us, J is also the quasih yp erb olic geo desic J R n \{ E } [ x, y ]. Since R n \ E is ϕ 2 -uniform we hav e (4.9) k G \ E ( x, y ) = k R n \ E ( x, y ) ≤ ϕ 2 ( | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) . Case B2: J ∩ S n − 1 ( z 0 , θδ 1 ( z 0 ) / 3) 6 = ∅ . T o get a conclusion lik e in (4.9) it is enough to show that (4.10) k G \ E ( x, y ) ≤ C k R n \ E ( x, y ) for some constant C > 0. Case B2a: x, y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 4) \ E a nd k R n \ E ( x, y ) > log 3 2 . Let x 1 b e the first interse ction p oin t of J with S n − 1 ( z 0 , δ 1 ( z 0 ) / 3) when w e tra v erse along J from x to y . Similarly , w e define x 2 when w e tra verse from y to x (see Figure 6). In a similar fashion, let us denote y 1 and y 2 the first intersec tion p oints of J R n \ E [ x, y ] with S n − 1 ( z 0 , δ 1 ( z 0 ) / 3) along b oth the direc tions resp ectiv ely . W e observ e that δ 2 ( z ) = δ 3 ( z ) for all z ∈ J [ x, x 1 ], where J [ x, x 1 ] denotes part of J from x to x 1 . Hence, along the geo desic J w e ha v e (4.11) k G \ E ( x, y ) = k R n \ E ( x, x 1 ) + k G \ E ( x 1 , x 2 ) + k R n \ E ( x 2 , y ) . No w, b y the triangle inequality we see that (4.12) k R n \ E ( x, x 1 ) ≤ k R n \ E ( x, y 1 ) + k R n \ E ( y 1 , x 1 ) . By comparing the quasih yp erb olic distance along the circular path joining y 1 and x 1 , w e obtain (4.13) k R n \ E ( y 1 , x 1 ) ≤ 4 π . ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 15 E • • y S n − 1 ( z 0 , d/ 4) • x z 0 S n − 1 ( z 0 , d/ 5) S n − 1 ( z 0 , d/ 3) • x 1 • x 2 J Figure 6. The geo desic J in tersects S n − 1 ( z 0 , d/ 3) at x 1 and x 2 , d = θ δ 1 ( z 0 ). On the other hand, w e see that (4.14) k R n \ E ( x, y 1 ) ≥ j R n \ E ( x, y 1 ) ≥ log 8 7 , b ecause | x − y 1 | ≥ θ δ 1 ( z 0 ) / 12 and δ 3 ( y 1 ) ≤ 7 θ δ 1 ( z 0 ) / 12. Combin ing (4.13) and (4.14), from (4.12) w e obtain k R n \ E ( x, x 1 ) ≤ 1 + 4 π log 8 7 k R n \ E ( x, y 1 ) . Similarly we get k R n \ E ( x 2 , y ) ≤ 1 + 4 π log 8 7 k R n \ E ( y 2 , y ) . A similar arg ument as in (4.13) a nd the last tw o inequalities together with (4.11) give k G \ E ( x, y ) ≤ 4 π + 1 + 4 π log 8 7 k R n \ E ( x, y ) . So, by the assumption in this case, the inequality ( 4 .10) follows from the last inequality with the constan t C = 1 + (4 π / log 8 7 ) + (4 π / log 3 2 ). Case B2b: x, y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 4) \ E a nd k R n \ E ( x, y ) ≤ log 3 2 . The w ell-know n inequalit y j R n \ E ( x, y ) ≤ k R n \ E ( x, y ) reduces to (4.15) R := 1 2 min { δ 3 ( x ) , δ 3 ( y ) } ≥ | x − y | . Without loss of generalit y w e assume that min { δ 3 ( x ) , δ 3 ( y ) } = δ 3 ( x ). Then there exists a p oin t x 0 ∈ S n − 1 ( x, 2 R ) ∩ ∂ E suc h that δ 3 ( x ) = | x − x 0 | = 2 R . F or the pro of of (4.10), w e 16 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN pro ceed a s follows k G \ E ( x, y ) ≤ k B n ( x, 2 R ) ( x, y ) ≤ 2 j B n ( x, 2 R ) ( x, y ) = 2 log 1 + | x − y | δ 3 ( x ) − | x − y | ≤ 2 log 1 + 2 | x − y | δ 3 ( x ) ≤ 4 log 1 + | x − y | δ 3 ( x ) = 4 j R n \{ x 0 } ( x, y ) ≤ 4 j R n \ E ( x, y ) , where the second, third and fourth inequalities follow from [1, Lemma 7.56], ( 4 .15) and (4.6) resp ectiv ely . Hence we prov ed Case B when x, y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 4) \ E . If x ∈ B n ( z 0 , θδ 1 ( z 0 ) / 4) \ E and y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 3) \ B n ( z 0 , θδ 1 ( z 0 ) / 4), b y considering a sphere S n − 1 ( z 0 , θδ 1 ( z 0 ) r ) with r ∈ (1 / 4 , 1 / 3) we pro ceed lik e b efore. If x ∈ B n ( z 0 , θδ 1 ( z 0 ) / 4) \ E and y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 2) \ B n ( z 0 , θδ 1 ( z 0 ) / 3), then the geo desic J G \ E [ x, y ] will in tersect S n − 1 ( z 0 , θδ 1 ( z 0 ) / 3). Let m b e the first in tersection p oin t when we tra v erse along the geodesic fro m x to y . Then alo ng t he geo desic we hav e k G \ E ( x, y ) = k G \ E ( x, m ) + k G \ E ( m, y ) ≤ k R n \ E ( x, m ) + a (1 / 4 , θ / 3) ϕ 1 ( | m − y | / min { δ 2 ( m ) , δ 2 ( y ) } ) ≤ ϕ 2 ( | x − m | / min { δ 3 ( x ) , δ 3 ( m ) } ) + a (1 / 4 , θ / 3) ϕ 1 ( | m − y | / min { δ 2 ( m ) , δ 2 ( y ) } ) ≤ ϕ 2 (4 | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) + a (1 / 4 , θ / 3 ) ϕ 1 (10 | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) , where the first and second inequalities follow b y Ca s e A and the a ssumption on E r esp ective ly . Th us, w e conclude that if x, y ∈ B n ( z 0 , θδ 1 ( z 0 ) / 2) \ E , then k G \ E ( x, y ) ≤ 2 a (1 / 4 , θ/ 3) ϕ 3 ( | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) , with ϕ 3 ( t ) = max { ϕ 2 (10 t ) , ϕ 1 (10 t ) } . Case C: x ∈ B n ( z 0 , θδ 1 ( z 0 ) / 4) \ E a nd y ∈ G \ B n ( z 0 , θδ 1 ( z 0 ) / 2). Let p ∈ J G \ E [ x, y ] ∩ S n − 1 ( z 0 , θδ 1 ( z 0 ) / 4). Then we see that k G \ E ( x, y ) = k G \ E ( x, p ) + k G \ E ( p, y ) ≤ 2 a (1 / 4 , θ / 3) ϕ 3 ( | x − p | / min { δ 2 ( x ) , δ 2 ( p ) } ) + a (1 / 5 , θ / 4) ϕ 1 ( | p − y | / min { δ 2 ( p ) , δ 2 ( y ) } ) ≤ 2 a (1 / 4 , θ / 3) ϕ 3 ( | x − p | / min { δ 2 ( x ) , δ 2 ( y ) } ) + a (1 / 5 , θ / 4) ϕ 1 ( | p − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) , where the first inequalit y ho lds b y Case B and Case A , a nd la st holds b y a similar argumen t as ab ov e (or as in the pro of of Case III in Theorem 4.1 ). It is eas y to see that max {| x − p | , | p − y |} ≤ 3 | x − y | . ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 17 In the same w a y , as in Theorem 4.1 , the monoto nicit y prop ert y of ϕ 3 and ϕ 1 giv es k G \ E ( x, y ) ≤ 4 a (1 / 4 , θ / 3) max { ϕ 2 (30 | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) , ϕ 1 (30 | x − y | / min { δ 2 ( x ) , δ 2 ( y ) } ) } . By combining a ll the ab ov e cases, a simple computation concludes that the domain G \ E is ϕ -uniform f o r ϕ ( t ) = 4 a (1 / 4 , θ / 3) max { ϕ 1 (30 t ) , ϕ 2 (30 t ) } , where a (1 / 4 , θ / 3) is obtained from Lemma 2.5. Corollary 4.16. Fix θ ∈ (0 , 1) . Assume that G R n is ϕ 0 -uniform and ( z i ) m i =1 ar e non- empty finite set of p oints in G such that δ ( z 1 ) = min { δ ( z i ) } m i =1 . Denote d := min i 6 = j {| z i − z j | / 2 } and δ := min { δ ( z 1 ) , d } . If al l E i , i = 1 , 2 , . . . , m , ar e no n -empty close d sets in B n ( z i , θδ / 5 ) such that R n \ S m i =1 E i is ϕ 1 -uniform for some ϕ 1 , then the domain G \ S m i =1 E i is ϕ -uniform fo r some ϕ . Pr o of. As a conse quence of Theorem 4.8 the pro of follows b y induction. What w e consider ab o v e are remo ving finite n umber of p oin t s or sets from a domain in a class yields a domain in the same class. In the fo llo wing, we w ould lik e to consider the case of remov ing infinite n um b er of p oints or sets from a domain, but in the geometric seque nce. W e first introduce a lemma (see [13, Theorem 2.23]) whic h is used latter in this section. Lemma 4.17. Supp ose that γ is a c -uniform ar c i n D with end p oin ts a, b . Then k D ( a, b ) ≤ 7 c 3 log 1 + | a − b | δ D ( a ) ∧ δ D ( b ) . As a consequence of [11, Theorem 5.4 ], o ne can prov e that Theorem 4.18. L et { x k } ∞ k =1 b e a se quenc e of p oints in B n ( x 0 , r ) satisfying: x k ∈ [ x 0 , x k − 1 ) and | x 0 − x k | = 1 2 k +2 r . Denote E = { x 0 } ∪ { x k } ∞ k =1 . T hen ther e exists some c onstant c s uch that B n ( x 0 , r ) \ E is c -unifo rm . W e now pro vide a similar result in the case of ϕ -unifor m domains. Theorem 4.19. Supp ose that D R n is a ϕ -uniform domain and x 0 ∈ D . let x 0 ∈ D , and { x k } ∞ k =1 b e a se quenc e of p oints in B n ( x 0 , δ D ( x 0 )) satisfying: x k ∈ [ x 0 , x k − 1 ) and | x 0 − x k | = 1 2 k +2 δ D ( x 0 ) . D enote E = { x 0 } ∪ { x k } ∞ k =1 . Then D \ E is ψ -uniform with ψ dep endin g on ϕ . Pr o of. W e note t ha t E ⊆ B n ( x 0 , 1 8 δ D ( x 0 )). Let x, y ∈ D \ E b e a rbitrary . W e sub divide the pro of into sev eral cases. Case I: x, y ∈ B n ( x 0 , 1 2 δ D ( x 0 )) \ E . By Theorem 4 .1 8 w e kno w that B n ( x 0 , 1 2 δ D ( x 0 )) \ E is c -unifor m with some constan t c . Then w e can join x, y b y a unifo r m a r c γ in B n ( x 0 , 1 2 δ D ( x 0 )) \ E , hence γ is uniform in D \ E also. Lemma 4.17 s ho ws that D \ E is ϕ 2 -uniform with ϕ 1 ( t ) = c log (1 + t ). Case II: x, y ∈ D \ B n ( x 0 , 1 4 δ D ( x 0 )) . 18 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN Since D is ϕ -uniform, using Lemma 2.3 we get k D \ E ( x, y ) ≤ a 1 4 k D ( x, y ) ≤ a 1 4 ϕ | x − y | min { δ D ( x ) , δ D ( y } ≤ a 1 4 ϕ | x − y | min { δ D \ E ( x ) , δ D \ E ( y ) } . This giv es that k D \ E ( x, y ) ≤ ϕ 2 | x − y | min { δ D \ E ( x ) , δ D \ E ( y ) } with ϕ 2 ( t ) = a ( 1 4 ) ϕ ( t ) . Case III: x ∈ B n ( x 0 , 1 4 δ D ( x 0 )) \ E , y ∈ D \ B n ( x 0 , 1 2 δ D ( x 0 )) . Let w ∈ S n − 1 ( x 0 , 1 2 δ D ( x 0 )). Then w e hav e δ D \ E ( w ) ≥ 1 4 δ D ( x 0 ) ≥ δ D \ E ( x ) , and max {| x − w | , | y − w |} ≤ 5 | x − y | . Hence k D \ E ( x, y ) ≤ k D \ E ( x, w ) + k D \ E ( w , y ) ≤ ϕ 1 | x − w | min { δ D \ E ( x ) , δ D \ E ( w ) } + ϕ 2 | y − w | min { δ D \ E ( y ) , δ D \ E ( w ) } ≤ 2 max { ϕ 1 5 | x − y | min { δ D \ E ( x ) , δ D \ E ( y ) } , ϕ 2 5 | x − y | min { δ D \ E ( x ) , δ D \ E ( y ) } } ≤ ϕ 3 | x − y | min { δ D \ E ( x ) , δ D \ E ( y ) } , where ϕ 3 ( t ) = 2 max { ϕ 1 (5 t ) , ϕ 2 (5 t ) } . Hence w e complete the pro of with ψ = ϕ 3 . Although t he following is a consequence of [11, Theorem 5.4 ], it follow s directly from Theorems 4.18 and 4.19. Corollary 4.20. Supp ose that D ⊂ R n is a c -uniform domain and x 0 ∈ D . Th en D \ E is c 1 -uniform with c 1 dep ending on c , wher e E is define d as in The or em 4.1 9. Theorem 4.21. L et { x i } ∞ i =1 b e a se quenc e of p oints in B n ( x 0 , r ) satisfying x i ∈ [ x 0 , x i − 1 ) and | x 0 − x i | = 1 2 i +2 r . Assume that B i , i = 1 , 2 , . . . , ar e disjo i n t b al ls with c enters x i and r a dii r i . F o r c ∈ (0 , 1) , let E i ⊂ B n ( x i , cr i ) b e the close d sets whose c omplements wi th r esp e ct to R n ar e ϕ -uniform and satisfy x i ∈ E i . Denote F = ∪ E i ∪ { x 0 } . Then B n ( x 0 , r ) \ F is ψ -uniform with ψ de p e nding on ϕ . Pr o of. Without loss of g eneralit y , w e may assume tha t x 0 = 0 , r = 1 and c = 1 4 . Let G = B n \ F , and x, y ∈ G b e arbitrary . W e prov e the theorem by considering three cases. Case A: x, y ∈ G \ B n ( 3 16 ). ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 19 By the choic e of F , w e hav e F ⊂ B n ( 3 16 ). Then G \ B n ( 3 16 ) is a c -uniform domain with some constan t c . Hence w e can join x and y by an arc γ in G \ B n ( 3 16 ) suc h that γ is a unif o rm arc in G . By L emma 4.17, w e see that for ev ery x, y ∈ G \ B n ( 3 16 ), k G ( x, y ) ≤ ϕ 1 | x − y | min { δ G ( x ) , δ G ( y ) } with ϕ 1 ( t ) = c log (1 + t ) . Case B: x, y ∈ B n ( 1 4 ) \ F . If | x − y | ≤ 1 2 min { δ G ( x ) , δ G ( y ) } , then k G ( x, y ) ≤ Z [ x,y ] | dw | δ G ( w ) ≤ 2 | x − y | min { δ G ( x ) , δ G ( y ) } . If | x − y | ≥ 1 2 min { δ G ( x ) , δ G ( y ) } , then w e assume that | x | ≤ | y | , and we divide the discussion of the pro o f in to three sub cases. Case B1: x, y / ∈ ∪ ∞ i =1 B n ( x i , 1 2 r i ) . In this case, there exis t some non-negativ e in tegers s and t with s ≥ t suc h that x ∈ B n ( 3 2 s +2 ) \ B n ( 3 2 s +3 ) and y ∈ B n ( 3 2 t +2 ) \ B n ( 3 2 t +3 ) . If | x − y | ≤ 3 2 t +8 , then w e hav e s = t or s = t + 1 . By coro llary 4.16 we get G 1 = [ B n ( 3 2 t +1 ) \ B n ( 3 2 t +5 )] \ F is ϕ 0 -uniform, where ϕ 0 dep ends on ϕ . Hence k G ( x, y ) ≤ k G 1 ( x, y ) ≤ ϕ 0 | x − y | min { δ G 1 ( x ) , δ G 1 ( y ) } ≤ ϕ 0 | x − y | min { δ G ( x ) , δ G ( y ) } , the last equality holds b ecause δ G 1 ( w ) ≥ δ G ( w ) for eve ry w ∈ B n ( 3 2 t +2 ) \ B n ( 3 2 t +4 ) . In the fo llowing, w e consider the case | x − y | ≥ 3 2 t +8 . Let T x , T y b e 2-dimensional subspaces determined by x and [0 , x 1 ], y a nd [0 , x 1 ], resp ectiv ely . Let l denote the line determined b y 0 and x 1 , then 0 divides l into t wo ra ys: l 1 and l 2 with x 1 ∈ l 2 . D enote the p oin ts of in tersection of l 1 with T x ∩ S n − 1 ( | x | ) a nd with T y ∩ S n − 1 ( | y | ) b y p x and p y , resp ectiv ely . Then x and p x determine a sh orter arc (or semicircle) in circle T x ∩ S n ( | x | ) whic h is denoted by α , similarly , y and p y determine a shorter arc (or semicircle) in circ le T y ∩ S n − 1 ( | y | ) denoted b y β . Let γ = α ∪ [ p x , p y ] ∪ β (see F igure 7), and let m , n be p ositiv e in tegers suc h that δ G ( x ) = δ R n \ E m ( x ), δ G ( y ) = δ R n \ E n ( y ) and denote G 2 = R n \ ( E m ∪ E n ). W e now pro v e (4.22) δ G ( w ) ≥ 1 2 min { δ G 2 ( x ) , δ G 2 ( y ) } for ev ery w ∈ γ . Let p b e a p ositiv e in teger suc h tha t δ G ( w ) = δ R n \ E p ( w ). Then for all w ∈ α we ha ve δ G ( w ) ≥ 1 2 | w − x k | ≥ 1 2 | x k − x | ≥ 1 2 δ G ( x ) = 1 2 δ G 2 ( x ) . Similarly , for all w ∈ β , δ G ( w ) ≥ 1 2 δ G 2 ( y ) holds. If w ∈ [ p x , p y ], then w e get δ G ( w ) ≥ δ G ( p x ) ≥ 1 2 δ G 2 ( x ) . The pro of of (4.22) follows. 20 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN Α Β 0 x p x y p y Figure 7. Picture fo r Case B1 : The radii of the circles are 3 / 2 s +3 , 3 / 2 s +2 , 3 / 2 t +3 and 3 / 2 t +2 resp ectiv ely , and the small ba lls contained in the r ing s are balls cente red at x i and with radii r i / 4. W e note that t he remov ed sets E ′ i s are con tained in suc h balls. By (4.22) and Corollary 4.16, we get k G ( x, y ) ≤ Z γ | dw | δ G ( w ) ≤ 2 Z γ | dw | min { δ G 2 ( x ) , δ G 2 ( y ) } ≤ 2 6 (2 π + 1) | x − y | min { δ G 2 ( x ) , δ G 2 ( y ) } ≤ 2 6 (2 π + 1) e k G 2 ( x,y ) − 1 ≤ 2 6 (2 π + 1) e H 1 − 1 = 2 6 (2 π + 1) e H 2 − 1 , with H 1 = ϕ 0 | x − y | min { δ G 2 ( x ) ,δ G 2 ( y ) } and H 2 = ϕ 0 | x − y | min { δ G ( x ) ,δ G ( y ) } , whic h shows that the theorem in this sub case holds with ψ ( t ) = 2 6 (2 π + 1) e ϕ 0 ( t ) − 1 =: ϑ ( t ) . Case B2: There exists some p ositive integer p suc h that x, y ∈ B n ( x p , 5 8 r p ) \ E p . Let G 3 = B n ( x p , r p ) \ E p . Then b y Theorem 4 .8, w e kno w that G 3 is ϕ 0 -uniform. Hence k G ( x, y ) ≤ k G 3 ( x, y ) ≤ ϕ 0 | x − y | min { δ G 3 ( x ) ∧ δ G 3 ( y ) } ≤ ϕ 0 5 | x − y | 3 min { δ G ( x ) , δ G ( y ) } . Case B 3: There exists some p ositiv e in teger p suc h that x ∈ B n ( x p , 1 2 r p ) \ E p and y ∈ [ B n \ B n ( x p , 5 8 x p )] \ F . ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 21 Cho ose w ∈ S n − 1 ( x p , 1 2 r p ) suc h that d G ( w ) ≥ d G ( x ). Then | x − w | ≤ r p ≤ 8 | x − y | and | y − w | ≤ | x − w | + | x − y | ≤ 9 | x − y | . Hence, Case B 1 and Case B 2 together yield k G ( x, y ) ≤ k G ( x, w ) + k G ( w , y ) ≤ ϕ 0 | x − w | min { δ G ( x ) , δ G ( w ) } + ϑ ( | w − y | min { δ G ( y ) , δ G ( w ) } ≤ ϕ 0 8 | x − y | min { δ G ( x ) , δ G ( y ) } + ϑ ( 9 | x − y | min { δ G ( y ) , δ G ( x ) } ≤ 2 max n ϕ 0 8 | x − y | min { δ G ( x ) , δ G ( y ) } , ϑ 9 | x − y | min { δ G ( y ) , δ G ( x ) } o , whic h sho ws that in this s ub case the theorem holds with ψ ( t ) = 2 max { ϕ 0 (8 t ) , ϑ (9 t ) } =: ϕ 3 ( t ) . Case C: x ∈ B n \ B n ( 1 4 ), y ∈ B n ( 3 16 ) \ F . Cho ose w ∈ S n − 1 ( 1 4 ) suc h that d G ( w ) ≥ d G ( y ) . Then max {| x − w | , | y − w |} ≤ 9 | x − y | , whic h sho ws k G ( x, y ) ≤ k G ( x, w ) + k G ( w , y ) ≤ ϕ 3 | x − w | min { δ G ( x ) , δ G ( w ) } + ϕ 2 | w − y | min { δ G ( y ) , δ G ( w ) } ≤ ϕ 3 9 | x − y | min { δ G ( x ) , δ G ( y ) } + ϕ 2 9 | x − y | min { δ G ( y ) , δ G ( x ) } ≤ 2 max n ϕ 3 9 | x − y | min { δ G ( x ) , δ G ( y ) } , ϕ 2 9 | x − y | min { δ G ( y ) , δ G ( x ) } o = ϕ 4 | x − y | min { δ G ( y ) , δ G ( x ) } , where ϕ 4 ( t ) = 2 max { ϕ 3 (9 t ) , ϕ 2 (9 t ) } . W e v erified all the case s and our conclus ion ho lds with ψ = ϕ 4 . W e now extend Theorem 4.21 to arbitra ry domains. Theorem 4.23. Supp ose that D ( R n is a ϕ -uniform domain and x 0 ∈ D . L et { x i } ∞ i =1 b e a se quenc e of p oin ts in B n ( x 0 , δ D ( x 0 )) satisfying x i ∈ [ x 0 , x i − 1 ) and | x 0 − x i | = 1 2 i +2 δ D ( x 0 ) . L et B i ’s b e disjoin t b al ls with c enters x i and r adii r i and for c ∈ (0 , 1) , let E i ⊂ B n ( x i , cr i ) b e the close d sets whose c omplements with r esp e ct to R n ar e ψ -uniform and satisfy x i ∈ E i . D enote F = ∪ E i ∪ { x 0 } . Then D \ F is ϕ 3 -uniform with ϕ 3 dep ending on ϕ and ψ . Pr o of. W e note that F ⊆ B n ( x 0 , 3 16 δ D ( x 0 )). Let x, y ∈ D \ F b e arbitra ry . W e pro ve the theorem by considering t hree cases. Case I: x, y ∈ B n ( x 0 , 1 2 δ D ( x 0 )) \ F . 22 R. KL ´ EN, Y. LI , S.K. SAHOO , AN D M. VUORI NEN By Theorem 4.21 w e kno w that D 1 = B n ( x 0 , 1 2 δ D ( x 0 )) \ F is ϕ 1 -uniform with ϕ 1 dep ending only on ϕ and ψ . Then k D \ F ( x, y ) ≤ k D 1 ( x, y ) ≤ ϕ 1 | x − y | min { δ D 1 ( x ) , δ D 1 ( y ) } = ϕ 1 | x − y | min { δ D \ F ( x ) , δ D \ F ( y ) } . Case II: x, y ∈ D 2 = D \ B n ( x 0 , 1 4 δ D ( x 0 )) . Since D is ϕ -uniform, using Lemma 2.5 with α = 1 4 and θ = 3 4 w e get k D \ F ( x, y ) ≤ k D 2 ( x, y ) ≤ a 1 4 , 3 4 k D ( x, y ) ≤ a 1 4 , 3 4 ϕ | x − y | min { δ D ( x ) , δ D ( y ) } ≤ a 1 4 , 3 4 ϕ | x − y | min { δ D \ F ( x ) , δ D \ F ( y ) } . This giv es that k D \ F ( x, y ) ≤ ϕ 2 | x − y | min { δ D \ F ( x ) , δ D \ F ( y ) } with ϕ 2 ( t ) = a ( 1 4 , 3 4 ) ϕ ( t ) . Case III: x ∈ B n ( x 0 , 1 4 δ D ( x 0 )) \ F , y ∈ D \ B n ( x 0 , 1 2 δ D ( x 0 )) . Let w ∈ S n − 1 ( x 0 , 1 2 δ D ( x 0 )). Then w e hav e δ D \ F ( w ) ≥ 1 4 δ D ( x 0 ) ≥ δ D \ F ( x ) , and max {| x − w | , | y − w |} ≤ 5 | x − y | . Hence k D \ F ( x, y ) ≤ k D \ F ( x, w ) + k D \ F ( w , y ) ≤ ϕ 1 | x − w | min { δ D \ F ( x ) , δ D \ F ( w ) } ≤ 2 max n ϕ 1 5 | x − y | min { δ D \ F ( x ) , δ D \ F ( y ) } , ϕ 2 5 | x − y | min { δ D \ F ( x ) , δ D \ E ( y ) } o ≤ ϕ 3 | x − y | min { δ D \ E ( x ) , δ D \ E ( y ) } , where ϕ 3 ( t ) = 2 max { ϕ 1 (5 t ) , ϕ 2 (5 t ) } . Hence w e complete the pro of of the theorem. A cknowledgements. This researc h w as started in the fall of 2008 when the third a uthor w as visiting the Unive rsit y of T urku, Finland, suppo rted b y CIMO, gran t num b er TM-08- 5606. The third author also ack no wledges the suppo rt of the National Board for Higher ON THE ST ABILITY OF ϕ -UNIFORM DOMAIN S 23 Mathematics, D AE, India, during his p ost-do ctoral study at I IT Madras. The w ork o f the first author was supp orted by the Graduate Sc ho ol of Analysis and its Applications, F inla nd. The w ork of the second author was supp orted b y the Academ y of Finland gran t of Matti V uorinen Pro ject n um b er 2600066611. and b y Hunan Pro vincial Inno v ation F oundation F or P ostgra dua t e, China. The authors thank t he referees who ha ve made v a luable commen ts on v arious v ersions of this man uscripts. Reference s [1] G. D. Anderson, M.K. V amanamur thy, and M.K. Vuorinen, Conformal Invariants, Ine qualities, and Qu asic onformal Maps , J ohn Wiley & Sons, Inc., 1997 . [2] F.W . Gehring, Characterizatio ns of quasidisks, Quasic onformal ge ometry and dynamics , 4 8 (1999), 11–41 . [3] F.W . Gehring and B.G. Osgoo d, Uniform domains and the quasihyper bo lic metric, J. Anal. Math. 36 (1979), 50–74. [4] F.W . Gehring and B.P. P alka, Qua siconformally homo geneous do mains, J . Anal. Math. 30 (1976), 172–1 99. [5] P . H ¨ ast ¨ o, S . Po nnusamy and S.K. Sahoo, Inequalities and g eometry o f the Apollonian and r elated metrics, R ev. R oumaine Math. Pur es Appl. 51 (2006 ), 433 –452 . [6] R. Kl ´ en, On hyperb olic type metrics, Dissertation, Universit y of T urku, Helsinki, 20 09 Ann. A c ad. Sci. F enn. Math. Diss. 152 (2009), 49pp. [7] H . Lind ´ en, Quasihyper bo lic geo desics and uniformity in elementary domains, Disserta tio n, University of Helsinki, Helsinki, 2005 . Ann. A c ad. Sci. F enn. Math. Diss. No. 146 (2005), 50 pp. [8] P . MacManus, The co mplemen t of a qua sim¨ obius sphere is uniform, Ann. A c ad. Sci. F enn. Math. 21 (1996), 399–41 0. [9] G. J. Mar tin and B.G. Osgood , The quasihyperb olic metric and the asso ciated estimates on the hyperb olic metric, J. Anal. Math. 47 (1986), 37–53. [10] O. Mar tio a n d J. Sar v as, Injectivity theo rems in plane a nd s pace, Ann. A c ad. Sci. F enn. Math. 4 (1979), 384–40 1. [11] J. V ¨ ais ¨ al ¨ a, Unifor m domains, T oh oku Math. J. 40 (1988), 101–1 18. [12] J. V ¨ ais ¨ al ¨ a, F ree quasico nformality in Ba nach s pa ces II, Ann. A c ad. Sci. F enn. Math. 16 (1991 ), 255– 310. [13] J. V ¨ ais ¨ al ¨ a, Relatively and inner uniform domains, Conformal Ge ometry and Dynamics, 2 (1998), 56–88 . [14] M. Vuorinen, Conformal inv a riants and quasir egular mappings, J. Anal. Math. 45 (1985 ), 69–11 5. [15] M. Vuorinen, Conformal Ge ometry and Quasir e gular Mappings , Lec tur e Notes in Mathema tics 13 19, Springer-V erlag, Ber lin–Heidelb erg–New Y ork , 1988. Dep ar tment o f Ma thema tics and St a tistics, University of Turku, FIN-20014 Turku, Fin- land E-mail addr ess : ri ku.kle n@utu .fi Dep ar tment of Ma thema tics, Hunan Normal University, Chan gsha, H unan 410081, P eople’s Republic of China E-mail addr ess : ya xiangl i@163 .com Dep ar tment of Ma thema tics, Indian Institute of Technol o gy Indore, I ndore 452 017, India E-mail addr ess : sw adesh@ iitm. ac.in Dep ar tment o f Ma thema tics and St a tistics, University of Turku, FIN-20014 Turku, Fin- land E-mail addr ess : vu orinen @utu. fi
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment