Control-constrained parabolic optimal control problems on evolving surfaces - theory and variational discretization
We consider control-constrained linear-quadratic optimal control problems on evolving surfaces. In order to formulate well-posed problems, we prove existence and uniqueness of weak solutions for the state equation, in the sense of vector-valued distr…
Authors: Morten Vierling
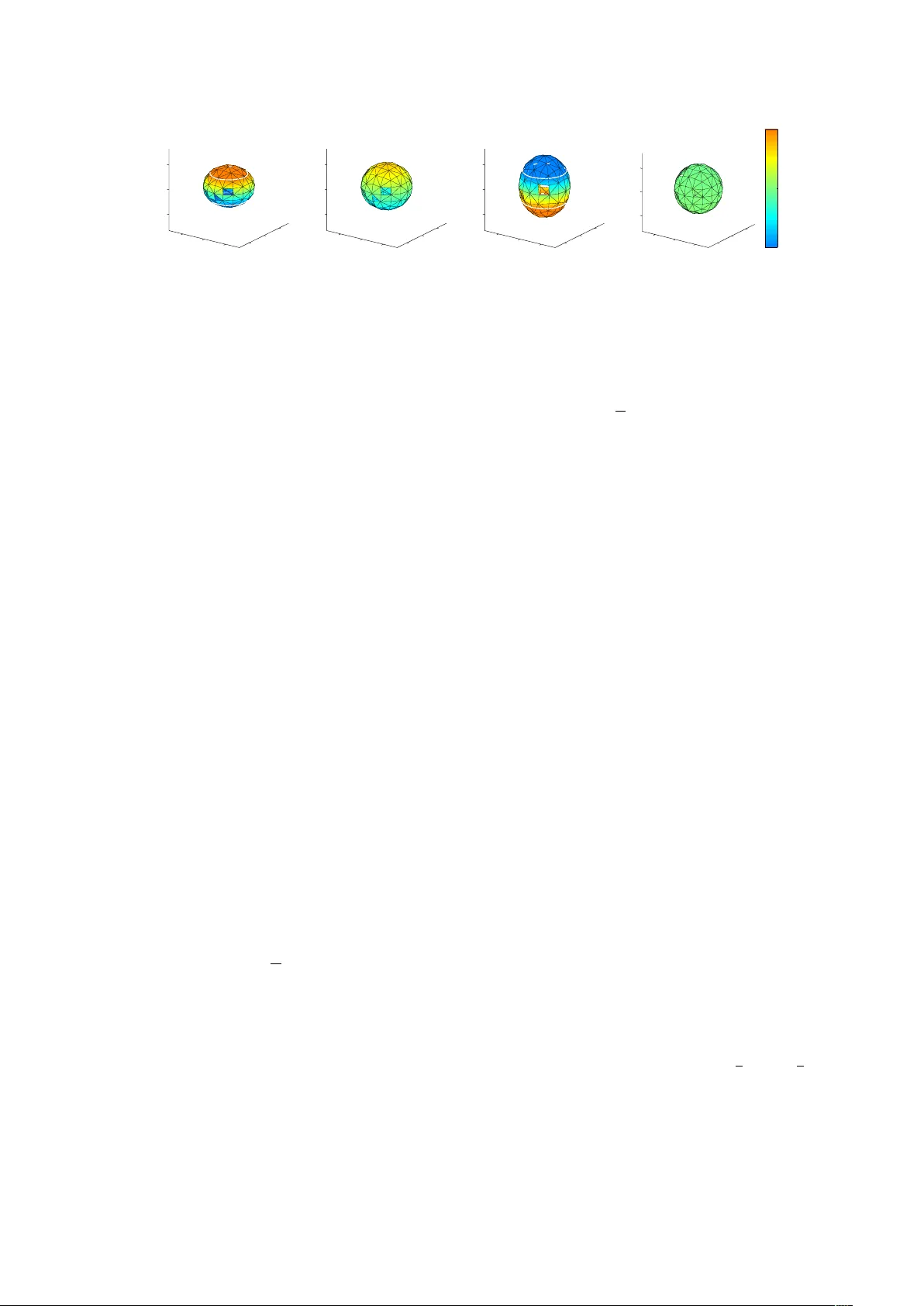
Con trol-constrained parab olic optimal con trol problems on ev olving surfaces – theory and v ariational discretization Morten Vierling ∗ No vem ber 2, 2018 Abstract: W e consider control-constrained linear-quadratic optimal con trol problems on ev olving h yp ersurfaces in R n +1 . In order to form ulate well-posed problems, we pro ve existence and uniqueness of weak solutions for the state equation, in the sense of vector-v alued distributions. W e then carry out and pro ve conv ergence of the v ariational discretization of a distributed optimal control problem. In the pro cess, w e inv estigate the conv ergence of a fully discrete approximation of the state equation, and obtain optimal orders of conv ergence under w eak regularity assumptions. W e conclude with a n umerical example. Mathematics Sub ject Classification (2010): 58J35 , 49J20, 49Q99, 35D30, 35R01 Keyw ords: Ev olving surfaces, weak solutions, parab olic optimal con trol, error estimates. 1 In tro duction W e inv estigate parab olic optimal con trol problems on ev olving material hypersurfaces in R n +1 . F ollowing [DE07], we consider a parab olic state equation in its w eak form d d t Z Γ( t ) y ϕ dΓ( t ) + Z Γ( t ) ∇ Γ y · ∇ Γ ϕ dΓ( t ) = Z Γ( t ) y ˙ ϕ dΓ( t ) + Z Γ( t ) f ϕ dΓ( t ) , (1.1) where Γ = Γ( t ) t ∈ [0 ,T ] is a family of C 2 -smo oth, compact n -dimensional surfaces in R n +1 , ev olving smoothly in time with velocity V . F urther assume f sufficien tly smo oth and let ˙ ϕ = ∂ t ϕ + V ∇ ϕ denote the material deriv ative of a smooth test function ϕ . W e start b y defining unique weak solutions for the state equation. The idea is to pull back the problem onto a fixed domain, in tro ducing distributional material deriv ativ es in the sense of [LM68] and a W (0 , T )-like solution space. As a consequence, a large part of the theory dev elop ed around W (0 , T ) for fixed domains applies, compare for example [LM68] and [Lio71] . An alternative approach to prov e existence of weak solutions along the lines of [LSU68] is tak en in [Sch10], that entirely a voids the notion of vector-v alued distributions. ∗ Sc hw erpunkt Optimierung und Approximation, Universit¨ at Ham burg, Bundesstraße 55, 20146 Hamburg, German y . 1 Recen t works also deal with the discretization of (1.1), b oth in space, compare [DE10], and time, see [DLM11] and [DE11]. In [DE10] order-optimal error b ounds of t yp e sup t ∈ [0 ,T ] k · k L 2 (Γ( t )) are derived for the dis- cretization of the state equation, assuming a slightly higher regularit y of the state than is used in section 5 and 6, where we derive R T 0 k · k 2 L 2 (Γ( t )) d t 1 2 -lik e b ounds. A class of Runge- Kutta methods to tackle the space-discretized problem is in vestigated in [DLM11], assuming among other things that one can ev aluate f in a p oin t-wise fashion, i.e. that f ( t ) ∈ L 2 (Γ( t )) is w ell defined. F or a fully discrete approach and the according error b ounds see [DE11]. There a backw ards Euler metho d is considered for time discretization whose implemen tation resem bles our discontin uous Galerkin approac h in Section 6. Y et while the approach in [DE11] ultimately leads to sup t ∈ [0 ,T ] k · k L 2 (Γ( t )) -con vergence, w e allo w for non-smo oth controls and th us cannot exp ect to obtain suc h strong conv ergence estimates. Basic facts on control constrained parab olic optimal con trol problems and their discretization can b e found for example in [T r¨ o05] and [MV08b], resp ectiv ely . The pap er is structured as follows. W e b egin with a v ery short in tro duction in to the set- ting in Section 2. In order to formulate w ell p osed optimal con trol problems we first proof the existence of an appropriate weak solution in Section 3, complementing the existence re- sults from [DE07]. W e then use the the results from Section 3 in order to form ulate con trol constrained optimal con trol problems in section 4. Afterwards, w e examine the space- and time-discretization of the state equation in Sections 5 and 6, b efore returning to the opti- mal con trol problems in Section 7. There w e apply v ariational discretization in the sense of [Hin05] to achiev e fully implementable optimization algorithms. W e end the pap er b y giving a numerical example in Section 8. 2 Setting Before we can properly form ulate (1.1), let us in tro duce some basic to ols and clarify what our assumptions are regarding the family Γ( t ) t ∈ [0 ,T ] . Assumption 2.1. The h yp ersurface Γ 0 = Γ(0) ⊂ R n +1 is C 2 -smo oth and compact (i.e. without b oundary). Γ evolv es along a C 2 -smo oth velocity field V : R n +1 × [0 , T ] → R n +1 with flo w ¯ Φ : R n +1 × [0 , T ] 2 → R n +1 , suc h that its restriction Φ s t ( · ) : Γ( s ) → Γ( t ) is a diffeomorphism for ev ery s, t ∈ [0 , T ]. The assumption gives rise to a second represen tation of Γ( t ) and in particular implies Γ( t ) to be orientable with a smo oth unit normal field ν ( · , t ). As a consequence, the evolution of Γ can b e describ ed as the level set of the signed distance function d suc h that Γ( t ) = x ∈ R n +1 | d ( x, t ) = 0 , as w ell as | d ( x, t ) | = dist( x, Γ( t )) and ∇ d ( x, t ) = ν ( x, t ) for x ∈ Γ( t ). F urther, we hav e d ( · , t ) ∈ C 2 ( N r ( t )) for some tubular neighborho o d N r ( t ) = x ∈ R n +1 | | d ( x, t ) | ≤ r of Γ( t ). Due to the uniform b oundedness of the curv ature of Γ( t ) the radius r > 0 do es not depend on t ∈ [0 , T ]. The domain of d is N T = S t ∈ [0 ,T ] N r ( t ) × { t } whic h is a neighborho o d of S t ∈ [0 ,T ] Γ( t ) × { t } in R n +2 . Using d w e can define the pro jection a t : N r ( t ) → Γ( t ) , a t ( x ) = x − d ( x, t ) ∇ d ( x, t ) , (2.1) 2 whic h allo ws us to extend an y function φ : Γ( t ) → R to N r ( t ) b y ¯ φ ( x ) = φ ( a t ( x )). Hence we can represent the surface gradient in global exterior co ordinates ∇ Γ( t ) φ = ( I − ν ( · , t ) ν ( · , t ) T ) ∇ ¯ φ as the euclidean pro jection of the gradien t of ¯ φ onto the tangen tial space of Γ( t ). In the fol- lo wing we will write ∇ Γ instead of ∇ Γ( t ) , wherever it is clear whic h surface Γ( t ) the gradient relates to. W e are going to exploit existing results on v ector-v alued distributions, whic h w e recall here for completeness. In order to define w eak deriv atives consider D ((0 , T )), the space of real v alued C ∞ -smo oth functions with compact supp ort in (0 , T ). Fix s ∈ [0 , T ]. Each y ∈ L 2 ((0 , T ) , H 1 (Γ( s ))) defines a v ector-v alued distribution T y : D ((0 , T )) → H 1 (Γ( s )) through the H 1 (Γ( s ))-v alued in tegral R [0 ,T ] y ( t ) ϕ ( t ) d t . Its distributional deriv ative is said to lie in L 2 ((0 , T ) , H − 1 (Γ( s ))) iff it can b e represen ted by w ∈ L 2 ((0 , T ) , H − 1 (Γ( s ))) in the following sense T 0 y ( ϕ ) = Z [0 ,T ] y ( t ) ϕ 0 ( t ) d t = − Z [0 ,T ] w ( t ) ϕ ( t ) d t ∈ H 1 (Γ( s )) , ∀ ϕ ∈ D ((0 , T )) , (2.2) and w e write y 0 = w . Note that b y H − 1 w e denote the representation of the dual ( H 1 ) ∗ whic h arises from L 2 ⊃ H 1 b y completion. Lemma 2.2. F or s ∈ [0 , T ] , the sp ac e W s (0 , T ) = v ∈ L 2 ((0 , T ) , H 1 (Γ( s ))) v 0 ∈ L 2 ((0 , T ) , H − 1 (Γ( s ))) with sc alar pr o duct R T 0 h· , ·i H 1 (Γ( s )) + h ( · ) 0 , ( · ) 0 i H − 1 (Γ( s )) d t is a Hilb ert sp ac e. 1. W s (0 , T ) is c omp actly emb e dde d into C ([0 , T ] , L 2 (Γ( s ))) , the sp ac e of c ontinuous L 2 - value d functions. 2. Denote by D ([0 , T ] , H 1 (Γ( s ))) the sp ac e of C ∞ -smo oth H 1 (Γ( s )) -value d test functions on [0 , T ] . The inclusion D ([0 , T ] , H 1 (Γ( s ))) ⊂ W s (0 , T ) is dense. 3. F or two functions v , w ∈ W s (0 , T ) the pr o duct h v ( t ) , w ( t ) i L 2 (Γ( s )) is absolutely c ontinu- ous with r esp e ct to t ∈ [0 , T ] and d d t Z Γ( s ) v ( t ) w ( t ) dΓ( s ) = h v 0 , w i H − 1 (Γ( s )) ,H 1 (Γ( s )) + h v , w 0 i H 1 (Γ( s )) ,H − 1 (Γ( s )) , a.e. in (0 , T ) , and as a c onse quenc e ther e holds the formula of p artial inte gr ation Z [ r,t ] h v 0 , w i H − 1 ,H 1 d τ = h v ( t ) , w ( t ) i L 2 (Γ( s )) − h v ( r ) , w ( r ) i L 2 (Γ( s )) − Z [ r,t ] h v , w 0 i H 1 ,H − 1 d τ . F or a pro of of the lemma, see [LM68, Ch. I,Thrms. 3.1 and 2.1]. In fact one can use the form ula of partial integration to prov e the em b edding into C ((0 , T ) , L 2 (Γ( s ))), see [Ev a98, Ch. 5,Thrm 3]. F or further references see [T r¨ o05, Thm. 3.10]. 3 Our approach to w eak material deriv ativ es relies on the following equiv alen t formulation of condition (2.2) ∀ ϕ ∈ D ((0 ,T ) , H 1 (Γ( s ))) : Z [0 ,T ] h y ( t ) , ϕ 0 ( t ) i L 2 (Γ( s )) + h w ( t ) , ϕ ( t ) i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t = 0 , (2.3) whic h defines the weak deriv ativ e y 0 = w of a function y ∈ L 2 ((0 , T ) , H 1 (Γ( s ))) via its L 2 ((0 , T ) , L 2 (Γ( s )))-scalar pro duct with elemen ts of D ((0 , T ) , H 1 (Γ( s ))). The equalit y (2.3) follo ws from (2.2) b y Lemma 2.2[ 3. ]. On the other hand (2.2) is a conse- quence of (2.3). T o see this, test (2.3) with ψ v ∈ D ((0 , T ) , H 1 (Γ( s ))), where ψ ∈ D ((0 , T )) and v ∈ H 1 (Γ( s )). 3 W eak solutions The scop e of this section is to formulate appropriate function spaces and a related weak material deriv ativ e, in order to prov e the existence of unique w eak solutions of (1.1) for quite w eak righ t-hand sides f . W e start by defining the strong material deriv ative for smo oth functions f ∈ C 1 ( R n +1 × [0 , T ]), namely the deriv ative ˙ f ( x, t ) = d d s s = t f (Φ t s ( x ) , s ) = ∇ f ( x, t ) V ( x, t ) + ∂ t f ( x, t ) , (3.1) along tra jectories of the v elo cit y field V . The material deriv ative has the follo wing prop erties. Lemma 3.1. L et f b e sufficiently smo oth. Then d d t Z Γ( t ) f dΓ( t ) = Z Γ( t ) ˙ f + div Γ V dΓ( t ) , and d d t Z Γ( t ) k∇ Γ f k 2 dΓ( t ) = Z Γ( t ) 2 ∇ Γ f · ∇ Γ ˙ f − 2 ∇ Γ f ( D Γ V ) ∇ Γ f + k∇ Γ f k 2 div Γ V dΓ( t ) , with div Γ( t ) V = P n +1 i =1 ∇ i Γ( t ) V i and ( D Γ( t ) V ) ij = ∇ j Γ( t ) V i . A pro of and details can be found in the App endix of [DE07]. Lemma and Definition 3.2. L et J s t ( · ) = det D Γ( s ) Φ s t ( · ) denote the Jac obian determinant of the matrix r epr esentation of D Γ( s ) Φ s t ( · ) with r esp e ct to ortho gonal b ases of the r esp e ctive tangent sp ac e. By Assumption 2.1 J s t ∈ C 1 ([0 , T ] × Γ( s )) and ther e exists C J > 0 , such that for al l s, t ∈ [0 , T ] 1 C J ≤ min γ ∈ Γ( s ) J s t ( γ ) ≤ max γ ∈ Γ( s ) J s t ( γ ) ≤ C J . Given Assumption 2.1, c onsider the family L 2 (Γ( t )) t ∈ [0 ,T ] . Then for v ∈ L 2 (Γ( t )) we in- tr o duc e the pul l-b ack φ s t v = v Φ s t ( · ) ∈ L 2 (Γ( s )) , 4 which is a line ar home omorphism fr om L 2 (Γ( t )) into L 2 (Γ( s )) for any s, t ∈ [0 , T ] . Mor e over φ s t is a line ar home omorphism fr om H 1 (Γ( t )) into H 1 (Γ( s )) . Thus final ly the adjoint op er- ator, φ s t ∗ : H − 1 (Γ( s )) → H − 1 (Γ( t )) is also a line ar home omorphism. Ther e exist c onstants C L 2 (Γ) , C H 1 (Γ) indep endent of s, t , such that for al l v ∈ L 2 (Γ( t )) , or v ∈ H 1 (Γ( t )) r esp e ctively, and for al l s, t ∈ [0 , T ] k φ s t v k H 1 (Γ( s )) ≤ C H 1 (Γ) k v k H 1 (Γ( t )) , k φ s t v k L 2 (Γ( s )) ≤ C L 2 (Γ) k v k L 2 (Γ( t )) , and thus final ly k φ s t ∗ k L ( H − 1 (Γ( s )) ,H − 1 (Γ( t ))) ≤ C H 1 (Γ) . F urthermor e ther e holds ∂ t J s t = φ s t ( div Γ( t ) V ) J s t . Pr o of. F or s, t ∈ [0 , T ] w e hav e Z Γ( t ) v 2 dΓ( t ) = Z Γ( s ) ( φ s t v ) 2 J s t dΓ( s ) and thus k φ s t v k L 2 (Γ( s )) ≤ C L 2 (Γ) k v k L 2 (Γ( t )) , with C L 2 (Γ) = C 1 2 J . F or H 1 equiv alence consider v ∈ H 1 (Γ( t )) and c ho ose ϕ ∈ C 1 (Γ( s )). Now Z Γ( s ) ( φ s t v ) ∇ Γ ϕ dΓ( s ) = Z Γ( t ) v (D ¯ Φ s t ) T ∇ Γ ( φ t s ϕ ) J t s dΓ( t ) and b ecause v ∈ H 1 (Γ( t )) we can integrate by parts on Γ( t ) to obtain with ν s = ν ( · , s ) Z Γ( s ) ( φ s t v ) ∇ Γ ϕ dΓ( s ) = − Z Γ( t ) w ( φ t s ϕ ) J t s dΓ( t ) = − Z Γ( s ) ( φ s t w − H s ν s φ s t v ) ϕ + ( φ s t v ) ϕH s ν s dΓ( s ) . Note that w ∈ L 2 (Γ( t )) n +1 and that k w k L 2 (Γ( t )) n +1 ≤ C k v k H 1 (Γ( t )) , where C dep ends only on the mean curv ature H t of Γ( t ) and the second space deriv ativ es of ¯ Φ whic h are bounded indep enden tly of s, t ∈ [0 , T ]. No w ∇ Γ( s ) ( φ s t v ) = φ s t w − H s ν s φ s t v ∈ L 2 (Γ( s )), because as stated ab o v e k φ s t w k L 2 (Γ( s )) n +1 ≤ C L 2 (Γ) C k v k H 1 (Γ( t )) , and k φ s t v k L 2 (Γ( s )) ≤ C L 2 (Γ) k v k L 2 (Γ( t )) . Th us, for some C H 1 (Γ) > 0 dep ending only on a global b ound on | H t | , k ∂ i ¯ Φ s t k and k ∂ ij ¯ Φ s t k , s, t ∈ [0 , T ], 1 ≤ i, j ≤ n + 1, there holds k φ s t v k H 1 (Γ( s )) ≤ C H 1 (Γ) k v k H 1 (Γ( t )) . No w k · k H 1 (Γ( t )) and k φ s t ( · ) k H 1 (Γ( s )) are tw o equiv alen t norms on H 1 (Γ( t )). Hence also their dual norms are equiv alen t. The norm of f ∈ H 1 (Γ( s )) 0 can now b e expressed b y sup w ∈ H 1 (Γ( s )) h f , w i ( H 1 (Γ( s ))) 0 ,H 1 (Γ( s )) k w k H 1 (Γ( s )) = sup v ∈ H 1 (Γ( t )) h φ s t ∗ f , v i ( H 1 (Γ( t ))) 0 ,H 1 (Γ( t )) k φ s t v k H 1 (Γ( s )) , (3.2) and the bound on the norm of φ s t ∗ follo ws from the equiv alence of said H 1 -norms. The last assertion is a b y-pro duct of the pro of of Lemma 3.1, compare [DE07]. W e need to state one more Lemma concerning contin uous time-dep endence of the previously defined norms. 5 Lemma 3.3. L et s ∈ [0 , T ] . F or v 1 ∈ H 1 (Γ( s )) , v 2 ∈ L 2 (Γ( s )) , v 3 ∈ H − 1 (Γ( s )) the fol lowing expr essions ar e c ontinuous with r esp e ct to t ∈ [0 , T ] k φ t s v 1 k H 1 (Γ( t )) , k φ t s v 2 k L 2 (Γ( t )) , k φ s t ∗ v 3 k H − 1 (Γ( t )) . Pr o of. By the change of v ariables formula we ha ve k φ t s v 1 k 2 H 1 (Γ( t )) = Z Γ( s ) ∇ Γ v 1 ( D Γ( s ) ¯ Φ s t ) − 1 ( D Γ( s ) ¯ Φ s t ) − T ∇ Γ v 1 + v 2 1 J s t dΓ( s ) , (3.3) whic h is a con tinuous function due to the regularity of Φ stated in Assumption 2.1. Similarly w e conclude the contin uity of the L 2 -norm. Moreo ver, since ( D Γ( s ) ¯ Φ s s ) − 1 ( D Γ( s ) ¯ Φ s s ) − T = id T Γ( s ) , J s s = 1, and Φ s ( · ) ( · ) ∈ C 2 (Γ( s ) × [0 , T ]) Equation (3.3) infers |k φ t s v k 2 H 1 (Γ( t )) − k v k 2 H 1 (Γ( s )) | ≤ C | t − s |k v k 2 H 1 (Γ( s )) , for all v ∈ H 1 (Γ( s )). Regarding (3.2) this allo ws us to estimate 1 (1 + C | s − t | ) 1 2 k v 3 k H − 1 (Γ( s )) ≤ k φ s t ∗ v 3 k H − 1 (Γ( t )) ≤ 1 (1 − C | s − t | ) 1 2 k v 3 k H − 1 (Γ( s )) . As far as Lemma 3.1 is concerned, for a family of functions { f ( t ) } t ∈ [0 ,T ] , f ( t ) : Γ( t ) → R , one can define ˙ f at γ = Φ 0 t γ 0 simply by ˙ f ( t )[ γ ] = φ t 0 d d t ( φ 0 t f ( t ))[ γ 0 , t ] = φ t 0 d d t [ f ( t )(Φ 0 t γ 0 )]. If { f ( t ) } can b e smo othly extended, this is equiv alen t to (3.1). The follo wing Lemmas aim at defining a weak material deriv ative of f that translates into a weak deriv ativ e of the pull-back φ 0 t f ( t ). Lemma and Definition 3.4. Consider the disjoint union B L 2 = S t ∈ [0 ,T ] L 2 (Γ( t )) × { t } . The set of functions f : [0 , T ] → B L 2 , t 7→ ( v t , t ) inherits a c anonic al ve ctor sp ac e structur e fr om the sp ac es L 2 (Γ( t )) (addition and multiplic ations with sc alars). Given Assumption 2.1, for s ∈ [0 , T ] we define L 2 L 2 (Γ) := ¯ v : [0 , T ] → B L 2 , t 7→ ( v t , t ) φ s t v ∈ L 2 ((0 , T ) , L 2 (Γ( s ))) . A busing notation, now and in the fol lowing we identify ¯ v ( t ) = ( v t , t ) ∈ L 2 L 2 (Γ) with v ( t ) = v t . Endowe d with the sc alar pr o duct h f , g i L 2 L 2 (Γ) = Z [0 ,T ] h f ( t ) , g ( t ) i L 2 (Γ( t )) d t . L 2 L 2 (Γ) b e c omes a Hilb ert sp ac e. In the same manner we define the sp ac e L 2 H 1 (Γ) . F or L 2 H − 1 (Γ) use φ t s ∗ inste ad of φ s t . Al l thr e e sp ac es do not dep end on s . F or ϕ ∈ φ ( · ) s D ((0 , T ) , H 1 (Γ( s ))) = n ϕ ∈ L 2 L 2 (Γ) φ s t ϕ ∈ D ((0 , T ) , H 1 (Γ( s )) o , it is cle ar how to interpr et ˙ ϕ , namely ˙ ϕ = φ t s ( φ s t ϕ ) 0 ∈ H 1 (Γ( t )) . We say that y ∈ L 2 H 1 (Γ) has we ak material derivative ˙ y ( t ) ∈ L 2 H − 1 (Γ) iff ther e holds Z [0 ,T ] h ˙ y , ϕ i H − 1 (Γ( t )) ,H 1 (Γ( t )) d t = − Z [0 ,T ] h y , ˙ ϕ i L 2 (Γ( t )) d t − Z [0 ,T ] Z Γ( t ) y ϕ div Γ V dΓ( t ) d t (3.4) 6 for al l ϕ ∈ φ ( · ) s D ((0 , T ) , H 1 (Γ( s ))) , and the definition do es not dep end on s . Pr o of. In order to define the scalar pro duct of L 2 L 2 (Γ) , w e must ensure measurabilit y of h f , g i L 2 (Γ( t )) : [0 , T ] → R . Since h f , g i = 1 2 ( k f + g k 2 − k f k 2 − k g k 2 ) it suffices to show measurabilit y of k f k 2 L 2 (Γ( t )) for all f ∈ L 2 L 2 (Γ) . By definition of the set L 2 L 2 (Γ) w e ha v e φ s t f ∈ L 2 ([0 , T ] , L 2 (Γ( s ))). Hence, there exists a sequence of measurable simple functions ˜ f n that con verge p oin twise a.e. to φ s t f in L 2 (Γ( s )). Eac h ˜ f n is the finite sum of measur- able single-v alued functions, i.e. ˜ f n = P M n i =1 f i,n 1 B i , M n ∈ N , f i,n ∈ L 2 (Γ( s )), [0 , T ] ⊃ B i measurable and disjoin t. By Lemma 3.3 the function k φ t s ˜ f n k L 2 (Γ( t )) = M n X i =1 k φ t s f i,n k L 2 (Γ( t )) 1 B i is the finite sum of measurable functions and thus measurable. Using the contin uit y of the op erator φ t s , as stated in Lemma 3.2, one infers p oin twise con v ergence a.e. of k φ t s ˜ f n k L 2 (Γ( t )) to wards k f k L 2 (Γ( t )) whic h in turn implies measurabilit y of k f k L 2 (Γ( t )) . Again by Lemma 3.2 we now conclude integrabilit y of k f k L 2 (Γ( t )) and at the same time equiv alence of the norms Z [0 ,T ] k f k 2 L 2 (Γ( t )) d t 1 2 and Z [0 ,T ] k φ s t f k 2 L 2 (Γ( s )) d t 1 2 . Completeness of L 2 L 2 (Γ) follo ws, since L 2 L 2 (Γ) and L 2 ((0 , T ) , L 2 (Γ( s ))) are isomorph. Again b ecause of Lemma 3.2, φ s t v ∈ L 2 ((0 , T ) , L 2 (Γ( s ))) is equiv alen t to φ r t v ∈ L 2 ((0 , T ) , L 2 (Γ( r ))), th us the definition do es not dep end on the choice of s . F or L 2 H 1 (Γ) and L 2 H − 1 (Γ) w e proceed similarly . W e show that the definition of the weak material deriv ativ e do es not dep end on s ∈ [0 , T ]. On Γ( s ) Equation (3.4) reads Z [0 ,T ] h φ t s ∗ ˙ y , ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t = − Z [0 ,T ] Z Γ( s ) φ s t y ˜ ϕ 0 ( t ) + φ s t y div Γ( t ) V ˜ ϕ J s t dΓ( s ) d t (3.5) for all ˜ ϕ ∈ D ([0 , T ] , H 1 (Γ( s ))). F or r ∈ [0 , T ], we no w transform the relation into one on Γ( r ), using φ r s , ( φ s r ) ∗ and φ r t = φ r s ◦ φ s t Z [0 ,T ] h φ t r ∗ ˙ y , φ r s ˜ ϕ i H − 1 (Γ( r )) ,H 1 (Γ( r )) d t = − Z [0 ,T ] Z Γ( r ) φ r t y ( φ r s ˜ ϕ ( t )) 0 + φ r t y div Γ( t ) V φ r s ˜ ϕ J r t dΓ( r ) d t, and b ecause φ r s : H 1 (Γ( s )) → H 1 (Γ( r )) is a linear homeomorphism, it also defines an isomor- phism b et ween D ([0 , T ] , H 1 (Γ( s ))) and D ([0 , T ] , H 1 (Γ( r ))). Remark 3.5. Strictly sp eaking the elemen ts of L 2 X (Γ) are equiv alence classes of functions coinciding a.e. in [0 , T ], just lik e the elements of L 2 ((0 , T ) , X (Γ( s ))). The definition of the weak deriv ative of y ∈ L 2 H 1 (Γ) in (3.4) translates into weak deriv atives of the pullback φ s t y . In order to make the connection b et w een the tw o, w e state the following 7 Lemma 3.6. L et w ∈ W s (0 , T ) and f ∈ C 1 ([0 , T ] × Γ( s )) . Then f w also lies in W s (0 , T ) and ( f w ) 0 = ∂ t f w | {z } ∈ L 2 ([0 ,T ] ,L 2 (Γ( s ))) + f w 0 , wher e f w 0 is to b e understo o d as h f w 0 , ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) = h w 0 , f ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) . Pr o of. W e sho w that for ϕ ∈ D (0 , T ) , H 1 (Γ( s )) the function f ϕ lies in W s (0 , T ). The claim then follows by partial integration in W s (0 , T ). 1. Because f ∈ C ([0 , T ] × Γ( s )) and the strong surface gradient ∇ Γ( s ) f ∈ ( C ([0 , T ] × Γ( s ))) n +1 are contin uous and thus uniformly contin uous on the compact set [0 , T ] × Γ( s ), we infer f ∈ C ([0 , T ] , C 1 (Γ( s ))). Note that dist [0 ,T ] × Γ( s ) (( t, γ ) , ( t + k , γ )) = k . Let > 0, then for sufficien tly small k > k > 0 one has k f ( t + k , · ) − f ( t, · ) k ∞ + n +1 X i =1 k∇ i Γ( s ) f ( t + k , · ) − ∇ i Γ( s ) f ( t, · ) k ∞ ≤ . 2. As to the distributional deriv ative of f ϕ , we show that f ∈ C 1 ([0 , T ] , C (Γ( s ))). Observ e that the uniform contin uity of the strong deriv ativ e ∂ t f on [0 , T ] × Γ( s ) allo ws us to estimate k f ( t + k , · ) − f ( t, · ) − ∂ t f ( t, · ) k k ∞ = k k Z [0 , 1] ∂ t f ( t + τ k , · ) − ∂ t f ( t, · ) d τ k ∞ ≤ k for k > k > 0 sufficien tly small. Again by uniform contin uity of ∂ t f we conclude ∂ t f ∈ C ([0 , T ] , C (Γ( s ))). All told, taking into accoun t the contin uit y of the p oin twise m ultiplication b et w een the resp ectiv e spaces, w e sho w ed f ϕ ∈ C ([0 , T ] , H 1 (Γ( s ))) ∩ C 1 ([0 , T ] , L 2 (Γ( s ))) ⊂ W s (0 , T ) . 3. Consider now an arbitrary w ∈ W s (0 , T ). Since f ϕ ∈ W s (0 , T ), by partial in tegration as in Lemma 2.2[ 3. ] it follo ws Z [0 ,T ] h w 0 , f ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t = − Z [0 ,T ] h w , ( f ϕ ) 0 i H 1 (Γ( s )) ,H − 1 (Γ( s )) d t = − Z [0 ,T ] h w , ∂ t f ϕ i L 2 (Γ( s )) d t − Z [0 ,T ] h w , f ϕ 0 i L 2 (Γ( s )) d t . Reordering gives Z [0 ,T ] h f w , ϕ 0 i L 2 (Γ( s )) d t = − Z [0 ,T ] h ∂ t f w + f w 0 , ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t for any ϕ ∈ D (0 , T ) , H 1 (Γ( s )) . Hence condition (2.3) holds for f w . Using the density prop ert y stated in Lemma 2.2[ 2. ], we can approximate f w by contin uous H 1 (Γ( s ))-v alued functions and infer f w ∈ L 2 ((0 , T ) , H 1 (Γ( s ))). The same argument yields ∂ t f w + f w 0 ∈ L 2 ((0 , T ) , H − 1 (Γ( s ))). 8 Finally we can define our solution space. Lemma and Definition 3.7. The solution sp ac e W Γ is define d as fol lows W Γ = n v ∈ L 2 H 1 (Γ) ˙ v ∈ L 2 H − 1 (Γ) o . W Γ is Hilb ert with the c anonic al sc alar pr o duct R T 0 h· , ·i H 1 (Γ( t )) + h ˙ ( · ) , ˙ ( · ) i H − 1 (Γ( t )) d t . A lso y ∈ W Γ iff φ s t y ∈ W s (0 , T ) for (every) s ∈ [0 , T ] . F or al l ˜ ϕ ∈ D ((0 , T ) , H 1 (Γ( s ))) ther e holds Z [0 ,T ] h φ t s ∗ ˙ y , ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t = Z [0 ,T ] h (( φ s t y ) 0 , J s t ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t . (3.6) One has c W k φ s t y k W s (0 ,T ) ≤ k y k W Γ ≤ C W k φ s t y k W s (0 ,T ) , and c W , C W > 0 do not dep end on s ∈ [0 , T ] . Pr o of. F or y ∈ W Γ , observe that J s t φ s t y ∈ L 2 ([0 , T ] , H 1 (Γ( s )) and rewrite (3.5) as Z [0 ,T ] h J s t φ s t y , ∂ t ˜ ϕ i L 2 (Γ( s )) d t = − Z [0 ,T ] h φ t s ∗ ˙ y , ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t − Z [0 ,T ] h ∂ t J s t φ s t y , ˜ ϕ i L 2 (Γ( s )) d t , (3.7) for ˜ ϕ ∈ D ((0 , T ) , H 1 (Γ( s ))). Hence J s t φ s t y ∈ W s (0 , T ), and from Lemma 3.6 it follo ws that also φ s t y ∈ W s (0 , T ), b ecause 1 J s t ∈ C 1 ([0 , T ] × Γ( s )). Note that w e used ∂ t J s t = φ s t ( div Γ( t ) V ) J s t , see Lemma 3.2. On the other hand, for any ˜ y ∈ W s (0 , T ) one has J s t ˜ y ∈ W s (0 , T ) and th us y = φ t s ˜ y ∈ W Γ . Hence φ s ( · ) constitutes an isomorphism b et ween W Γ and W s (0 , T ). Apply Lemma 3.6 a second time to obtain ( J s t ˜ ϕ ) 0 = ∂ t J s t ˜ ϕ + J s t ˜ ϕ 0 and because of ˜ ϕ (0) = ˜ ϕ ( T ) = 0 ∈ H 1 (Γ( s )) by partial integration there follo ws from (3.7) Z [0 ,T ] h φ t s ∗ ˙ y , ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t = Z [0 ,T ] h (( φ s t y ) 0 , J s t ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t , compare Lemma 2.2[ 3 .]. This pro v es the second claim. The claim of W Γ b eing Hilbert now follows. Observ e that p oin t-wise m ultiplication with J s t constitutes a linear homeomorphism in H 1 (Γ( s )) whose in verse is the multiplication b y 1 J s t . One easily chec ks k J s t ϕ k H 1 (Γ( s )) ≤ c k J s t k C 1 (Γ( s )) k ϕ k H 1 (Γ( s )) ≤ C k ϕ k H 1 (Γ( s )) . This together with Lemma 3.2 yields the equiv alence of the t wo norms on W Γ Z [0 ,T ] k y k 2 H 1 (Γ( t )) + k ˙ y k 2 H − 1 (Γ( t )) d t and Z [0 ,T ] k φ s t y k 2 H 1 (Γ( s )) + k ( φ s t y ) 0 k 2 H − 1 (Γ( s )) d t . Completeness of W s (0 , T ) then implies completeness of W Γ . Remark 3.8. F ormula (3.6) can b e seen as a generalization of the follo wing relation. Assume φ s t y ∈ D ((0 , T ) , H 1 (Γ( s ))). Then Z [0 ,T ] h φ t s ∗ ˙ y , ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) d t = Z [0 ,T ] h ˙ y , φ t s ˜ ϕ i L 2 (Γ( t )) d t = Z [0 ,T ] h ( φ s t y ) 0 , J s t ˜ ϕ i L 2 (Γ( s )) d t . 9 Using Lemma 3.6 and 2.2, it is no w easy to pro of Lemma 3.9. F or two functions v , w ∈ W Γ the expr ession h v ( t ) , w ( t ) i L 2 (Γ( t )) is absolutely c ontinuous with r esp e ct to t ∈ [0 , T ] and 1 d t Z Γ( t ) v w dΓ( t ) = h ˙ v , w i H − 1 (Γ( t )) ,H 1 (Γ( t )) + . . . h v , ˙ w i H 1 (Γ( t )) ,H − 1 (Γ( t )) + Z Γ( t ) v w div Γ( t ) V dΓ( t ) , a.e. in (0 , T ) , and ther e holds the formula of p artial inte gr ation Z [ s,t ] h ˙ v , w i H − 1 (Γ( τ )) ,H 1 (Γ( τ )) d τ = h v , w i L 2 (Γ( t )) − h v , w i L 2 (Γ( s )) . . . − Z [ s,t ] h h v , ˙ w i H 1 (Γ( τ )) ,H − 1 (Γ( τ )) + Z Γ( τ ) v w div Γ V dΓ( τ ) i d τ . W e can now formulate (1.1) in a weak and sligh tly generalized manner. Let ˜ b ∈ C 1 ([0 , T ] × Γ 0 ) and b = φ t 0 ˜ b . W e lo ok for solutions u ∈ W Γ that satisfy y (0) = y 0 ∈ L 2 (Γ 0 ) and for f ∈ L 2 H − 1 (Γ) d d t Z Γ( t ) y ϕ dΓ( t ) + Z Γ( t ) ∇ Γ y · ∇ Γ ϕ + by ϕ dΓ( t ) = h ˙ ϕ, y i H − 1 (Γ( t )) ,H 1 (Γ( t )) . . . + h f , ϕ i H − 1 (Γ( t )) ,H 1 (Γ( t )) , (3.8) for all ϕ ∈ W Γ and a.e. t ∈ (0 , T ). One ma y equiv alently write (3.8) as ˙ y + ∆ Γ( t ) y + y div Γ( t ) V + b = f in H − 1 (Γ( t )) for a.e. t ∈ (0 , T ). W e apply kno wn existence and uniqueness results for the pulled-bac k equation to pro ve Theorem 3.10. L et f ∈ L 2 H − 1 (Γ) , y 0 ∈ L 2 (Γ 0 ) . Ther e exists a unique y ∈ W Γ , such that (3.8) is fulfil le d for al l φ ∈ W Γ and a.e. t ∈ (0 , T ) . Ther e holds k y k W Γ ≤ C k y 0 k L 2 (Γ 0 ) + k f k L 2 H − 1 (Γ) . Pr o of. Let us relate equation (3.8) to the fixed domain Γ( s ) via d d t Z Γ( s ) ˜ y ˜ ϕJ s t dΓ( s ) + Z Γ( s ) ∇ Γ ˜ y ( D Γ( s ) ¯ Φ s t ) − 1 ( D Γ( s ) ¯ Φ s t ) − T ∇ Γ ˜ ϕ + ˜ b ˜ y ˜ ϕ J s t dΓ( s ) . . . = h ˜ ϕ 0 , J s t ˜ y i H − 1 (Γ( s )) ,H 1 (Γ( s )) + h ˜ f , J s t ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) , 10 with ˜ y = φ s t y , ˜ f = 1 J s t φ t s ∗ f ∈ L 2 ((0 , T ) , H − 1 (Γ( s )) and for all φ s t ϕ = ˜ ϕ ∈ W s (0 , T ). This again is equiv alen t to h ˜ y 0 , ˜ ϕJ s t i H − 1 (Γ( s )) ,H 1 (Γ( s )) + Z Γ( s ) ˜ y ˜ ϕ φ s t (div Γ( t ) V ) + ˜ b J s t dΓ( s ) + . . . + Z Γ( s ) ∇ Γ ˜ y ( D Γ( s ) ¯ Φ s t ) − 1 ( D Γ( s ) ¯ Φ s t ) − T ∇ Γ ˜ ϕJ s t dΓ( s ) = h ˜ f , J s t ˜ ϕ i H − 1 (Γ( s )) ,H 1 (Γ( s )) . With ψ = J s t ˜ ϕ one gets for all ψ ∈ W s (0 , T ) h ˜ y 0 , ψ i H − 1 (Γ( s )) ,H 1 (Γ( s )) + a ( t, ˜ y , ψ ) = h ˜ f , ψ i H − 1 (Γ( s )) ,H 1 (Γ( s )) , (3.9) with a bilinear form a ( t, ˜ y, ψ ) = Z Γ( s ) ∇ Γ ˜ y ( D Γ( s ) ¯ Φ s t ) − 1 ( D Γ( s ) ¯ Φ s t ) − T ∇ Γ ψ dΓ( s ) + Z Γ( s ) ˜ y φ s t (div Γ( t ) V ) + ˜ b ψ dΓ( s ) . . . − Z Γ( s ) ∇ Γ ˜ y ( D Γ( s ) ¯ Φ s t ) − 1 ( D Γ( s ) ¯ Φ s t ) − T ∇ Γ J s t ψ J s t dΓ( s ) . By Assumption 2.1 the bilinear form ( D Γ( s ) ¯ Φ s t ) − 1 [ γ ]( D Γ( s ) ¯ Φ s t ) − T [ γ ] is positive definite on the tangen tial space T γ Γ( s ) uniformly in s, t ∈ [0 , T ] and γ ∈ Γ( s ). Thus, there exists c > 0 suc h that for some k 0 ≥ 0 one has a ( t, ψ , ψ ) + k 0 k ψ k L 2 (Γ( s )) ≥ c k ψ k H 1 (Γ( s )) . W e are now in the situation to apply for example [Lio71, Ch. I I I, Thrm. 1.2], to obtain a unique solution ˜ y ∈ W s (0 , T ) to equation (3.9) for initial data φ s 0 y 0 ∈ L 2 (Γ( s )). Moreov er the solution map is contin uous k ˜ y k W s (0 ,T ) ≤ C k ˜ f k L 2 ((0 ,T ) ,H − 1 (Γ( s ))) + k φ s 0 y 0 k L 2 (Γ( s )) Note again that k ˜ f k L 2 ((0 ,T ) ,H − 1 (Γ( s ))) ≤ C k f k L 2 H − 1 (Γ) , since the multiplication with J s t is a globally b ounded linear homeomorphism in H 1 (Γ( s )), as stated in the pro of os Lemma 3.7. The transformation of (3.8) in to (3.9) works both wa ys, hence the uniqueness of y ∈ W Γ . The norms can be estimated as in Lemma 3.2 and Lemma 3.7 and the theorem follows. With regard to order-optimal con vergence estimates, sometimes a slightly higher regularity than y ∈ W Γ is required. Assuming f ∈ L 2 L 2 (Γ) and y 0 ∈ H 1 (Γ 0 ), one can apply a Galerkin appro ximation argumen t, see [DE07, Thms. 4.4 and 4.5] for manifolds or [Ev a98] for op en sets, to obtain k ˙ y k 2 L 2 L 2 (Γ) + sup t ∈ [0 ,T ] k∇ Γ( t ) y k 2 L 2 (Γ( t )) + Z [0 ,T ] k y k 2 H 2 (Γ( t )) d t ≤ C k y k 2 H 1 (Γ(0)) + k f k 2 L 2 L 2 (Γ) . (3.10) Note that from [LM68, Ch. I,Thrm. 3.1] it then follo ws that φ s t y ∈ C ([0 , T ] , H 1 (Γ( s ))). 11 4 Con trol constrained optimal con trol problems Using the results from the previous section, we can no w formulate all kinds of control- constrained optimal control problems known for stationary domains, see for example [T r¨ o05]. As a first example, giv en a moving surface as in Assumption 2.1, let S T : L 2 L 2 (Γ) → L 2 (Γ( T )) denote the solution op erator u 7→ y ( T ), where y satisfies d d t Z Γ( t ) y ϕ dΓ( t ) + Z Γ( t ) ∇ Γ y · ∇ Γ ϕ dΓ( t ) = h ˙ ϕ, y i H − 1 (Γ( t )) ,H 1 (Γ( t )) + h u, ϕ i L 2 L 2 (Γ) , (4.1) for all ϕ ∈ W Γ , and with y (0) = 0 ∈ L 2 (Γ 0 ). W e know, that every function y ∈ W Γ has a represen tation in C ([0 , T ] , L 2 (Γ( s ))) for an y s ∈ [0 , T ], compare Lemma 2.2, and the inclusion φ s ( · ) W Γ ⊂ C ([0 , T ] , L 2 (Γ( s ))) is contin uous (in fact compact). Th us S T is a contin uous linear op erator. Consider the Con trol problem ( P T ) min u ∈ L 2 L 2 (Γ) J ( u ) := 1 2 k S T ( u ) − y T k 2 L 2 (Γ( T )) + α 2 k u k L 2 L 2 (Γ) s.t. a ≤ u ≤ b , with α, a, b ∈ R , a < b , α > 0, and y T ∈ L 2 (Γ( T )). This is now a w ell p osed problem. By standard argumen ts, see for example [T r¨ o05, Thm. 3.15], using the weak lo w er semicontin uit y of J ( · ), one can conclude the existence of a unique solution u ∈ L 2 L 2 (Γ) . F or an other example let the linear con tin uous solution op erator S d : L 2 L 2 (Γ) → L 2 L 2 (Γ) , u 7→ y , where y solv es (4.1), and consider the problem ( P d ) min u ∈ L 2 L 2 (Γ) J ( u ) := 1 2 k S d ( u ) − y d k 2 L 2 L 2 (Γ) + α 2 k u k L 2 L 2 (Γ) s.t. a ≤ u ≤ b , with α, a, b as abov e and y d ∈ L 2 L 2 (Γ) . Again there exists a unique solution, see [T r¨ o05, Thm. 3.16]. The first order necessary optimalit y condition for ( P d ) reads h S d u − y d , S d ( v − u ) i L 2 L 2 (Γ) + α h u, v − u i L 2 L 2 (Γ) = h αu + S ∗ d ( S d u − y d ) , v − u i L 2 L 2 (Γ) ≥ 0 , (4.2) for all v ∈ U ad = n v ∈ L 2 L 2 (Γ) | a ≤ v ≤ b o . The adjoint op erator S ∗ d : L 2 L 2 (Γ) → L 2 L 2 (Γ) maps v ∈ L 2 L 2 (Γ) on to the solution p ∈ W Γ of −h ˙ p, ϕ i H − 1 (Γ( t )) ,H 1 (Γ( t )) + Z Γ( t ) ∇ Γ p · ∇ Γ ϕ dΓ( t ) = h v , ϕ i L 2 L 2 (Γ) , (4.3) for all ϕ ∈ W Γ , and p ( T ) = 0 ∈ L 2 (Γ( T )). This follows if one tests (4.1) with p and (4.3) with y . Integrate ov er [0 , T ] and use y (0) = 0 and p ( T ) = 0 to arrive at h v, y i L 2 L 2 (Γ) = h p, u i L 2 L 2 (Γ) , for u, v ∈ L 2 L 2 (Γ) arbitrary . Note that via the time transform t 0 = T − t Equation (4.3) con v erts into equation (3.8) with b = − div Γ( t ) V . Therefore all the results from Section 3 also apply to (4.3). 12 The necessary condition (4.2) characterizes the optimum u as the orthogonal pro jection of − 1 α S ∗ d ( S d u − y d ) on to U ad . In our situation this is the p oint wise application of the pro jection P [ a,b ] : R → [ a, b ]. Lemma 4.1. L et P U ad denote the L 2 L 2 (Γ) -ortho gonal pr oje ction onto U ad , which is define d by h u − P U ad ( u ) , v − P U ad ( u ) i L 2 L 2 (Γ) ≤ 0 ∀ v ∈ U ad . (4.4) Then for u ∈ L 2 L 2 (Γ) one has for a.e. t ∈ [0 , T ] P U ad ( u )[ t ] = P [ a,b ] ( u [ t ]) . Pr o of. Because L 2 ([0 , T ] , L 2 (Γ( s ))) is isometrically isomorph to L 2 ([0 , T ] × Γ( s )), and b ecause φ s t P [ a,b ] ( u ) ∈ L 2 ([0 , T ] × Γ( s )), w e also ha ve φ s t P [ a,b ] ( u ) ∈ L 2 ([0 , T ] , L 2 (Γ( s ))). Let C = t ∈ [0 , T ] P U ad ( u )[ t ] 6 = P [ a,b ] ( u [ t ]) and assume meas( C ) > 0. Now test (4.4) with v = P [ a,b ] ( u [ t ]) to arriv e at Z [0 ,T ] h u − P U ad ( u ) , P [ a,b ] ( u ) − P U ad ( u ) i L 2 (Γ( t )) d t ≤ 0 . (4.5) But now for a.e. t ∈ [0 , T ] and a.e. γ ∈ Γ( t ) one has ( u t [ γ ] − P U ad ( u t )[ γ ])( P [ a,b ] ( u t )[ γ ] − P U ad ( u t )[ γ ] ≥ 0 , b ecause P U ad ( u t )[ γ ] ∈ [ a, b ]. Moreo v er for t ∈ C w e ha v e ( u t [ γ ] − P U ad ( u t )[ γ ])( P [ a,b ] ( u t )[ γ ] − P U ad ( u t )[ γ ] > 0 , on a set of positive measure. Since meas( C ) > 0 this contradicts (4.5). In tro ducing the adjoin t state p d ( u ) = S ∗ d ( S d u − y d ), let us now rewrite (4.2) as u = P [ a,b ] − 1 α p d ( u ) . (4.6) Similarly the unique solution u of ( P T ) is c haracterized by u = P [ a,b ] − 1 α p T ( u ) , with p T ( u ) = S ∗ T ( S T u − y T ). Note that how ev er the adjoint state p T in general is less smo oth than p d . This is because the adjoint equation, i.e. the equation describing S ∗ T : L 2 (Γ( T )) → L 2 L 2 (Γ) , v 7→ p , reads −h ˙ p, ϕ i H − 1 (Γ( t )) ,H 1 (Γ( t )) + Z Γ( t ) ∇ Γ p · ∇ Γ ϕ dΓ( t ) = 0 , for all ϕ ∈ W Γ and with p ( T ) = v ∈ L 2 (Γ( T )). While Theorem 3.10 applies, this is not the case for the smo othness assertion (3.10), as long as y d ∈ L 2 (Γ( T )) \ H 1 (Γ( T )). Before we can discuss the discretized control problems in Section 7, in the next tw o sections w e presen t some results on the discretization of the state equation. 13 5 Finite Element Discretization W e no w discretize Γ using an approximation Γ h 0 of Γ 0 whic h is globally of class C 0 , 1 . F or the sak e of conv enience let us assume n = 2, i.e. Γ( t ) is a hypersurface in R 3 . F ollo wing [Dzi88] and [DE07], we consider Γ h 0 = S i ∈ I h T i h consisting of triangles T i h with corners on Γ 0 , whose maximum diameter is denoted b y h . With FEM error b ounds in mind w e assume the family of triangulations { Γ h 0 } h> 0 to b e regular in the usual sense that the angles of all triangles are b ounded a wa y from zero uniformly in h . As detailed in [DE10] and [DE07] an evolving triangulation Γ h ( t ) of Γ( t ) is obtained b y sub jecting the vertices of Γ h 0 to the flo w ¯ Φ. Hence, the no des of Γ h ( t ) reside on Γ( t ) for all times t ∈ [0 , T ], the triangles T i h b eing deformed in to triangles T i h ( t ) by the mo v ement of the v ertices. Let m h denote the n umber of v ertices { X 0 j } m h j =1 in Γ h 0 . Now X j ( t ) solves d d t X j ( t ) = V ( X j ( t ) , t ) , X j (0) = X 0 j . (5.1) Consider the finite element space V h ( t ) = n v ∈ L 2 (Γ h ( t )) v ∈ C (Γ h ( t )) and ∀ i ∈ I h : v T i h ( t ) ∈ Π 1 ( T i h ( t )) o of piecewise linear, globally con tinuous functions on Γ h ( t ), and its no dal basis functions { ϕ j ( t ) } m h j =1 that are one at exactly one v ertex X i ( t ) of Γ h ( t ) and zero at all others. F or the finite element approac h, it is crucial for the triangles T i h ( t ) not to degenerate while Γ h ( t ) ev olves, whic h leads us to the following assumption. Assumption 5.1. The angles of the triangles T i h ( t ) are b ounded aw a y from zero, uniformly w.r.t. h, i and t . Also assume a t (Γ h ( t )) = Γ( t ), with the restriction of a t to Γ h ( t ) being a homeomorphism b et ween Γ h ( t ) and Γ( t ). In order to ensure optimal approximation properties of the discretization of the surface, w e require d to b e twice Lipsc hitz-contin uously differentiable. Assumption 5.2. d ∈ C 2 , 1 ( N T ). Let us summarize some basic prop erties of the family { Γ h ( t ) } t ∈ [0 ,T ] . Lemma and Definition 5.3. L et Φ s · ,h : Γ h ( s ) × [0 , T ] → R 3 denote the flow of Γ h , i.e. the unique c ontinuous map, such that Φ s t,h ( T i h ( s )) = T i h ( t ) and Φ s t,h is affine line ar on e ach T i h ( s ) . Ther e holds Φ r t,h = Φ s t,h ◦ Φ r s,h and thus Φ t s,h ◦ Φ s t,h = id Γ h ( s ) . The velo city V h = ∂ t Φ 0 t,h is the pie c ewise line ar interp olant of V on e ach triangle T i h ( t ) . As in L emma 3.2 we define the pul l-b ack φ s t,h : L 2 (Γ h ( t )) → L 2 (Γ h ( s )) , φ s t,h v = v ◦ Φ t s,h . The pie c ew ise c onstant Jac obian J s t,h of Φ s t,h satisfies for al l s, t ∈ [0 , T ] 1 C h J ≤ min γ ∈ Γ( s ) J s t,h ( γ ) ≤ max γ ∈ Γ( s ) J s t,h ( γ ) ≤ C h J , (5.2) for some c onstant C h J > 0 that do es not dep end on h > 0 . Mor e over J s t,h and D Γ( s ) Φ s t,h : T Γ( s ) → T Γ( t ) ⊂ R 3 ar e differ entiable with r esp e ct to time in the interior of e ach T i h ( s ) . 14 The no dal b asis functions have the tr ansp ort pr op erty ˙ ϕ i = φ t 0 ,h d d t φ 0 t,h ϕ i ≡ 0 , 1 ≤ i ≤ m h . (5.3) L et ν h ( t ) denote the normals of Γ h ( t ) , define d on e ach T i h ( t ) . Pr o of. Consider a T riangle T i h ( s ), s ∈ [0 , T ]. W.l.o.g. let X 1 ( s ) , X 2 ( s ) , X 3 ( s ) denote its ver- tices. Then, using matrices X i ( t ) = ( X 2 ( t ) − X 1 ( t ) , X 3 ( t ) − X 1 ( t )), we can write γ ∈ T i h ( s ) in reduced barycentric co ordinates as λ γ ( s ) = ( X i ( s ) T X i ( s )) − 1 X i ( s ) T ( γ − X 1 ( s )). On T i h ( s ) the transformation Φ s t,h is uniquely defined by λ Φ s t,h γ ( t ) = λ γ ( s ) and th us Φ s t,h ( γ ) = X i ( t )( X i ( s ) T X i ( s )) − 1 X i ( s ) T ( γ − X 1 ( s )) + X 1 ( t ) . In the relativ e interior of T i h ( s ) the map Φ s t,h : T i h ( s ) → T i h ( t ) is differen tiable and its deriv ativ e D T i h ( s ) Φ s t,h : R 3 ⊃ T T i h ( s ) → T T i h ( t ) ⊂ R 3 can b e represen ted in terms of the standard basis of R 3 b y the matrix D i s,t = X i ( t ) X i ( s ) T X i ( s )) − 1 X i ( s ) T . No w one easily pro v es that the angle condition in Assumption 5.1 ensures the existence of c > 0 such that λ T X i ( s ) T X i ( s ) λ ≥ c min( k X 2 ( s ) − X 1 ( s ) k 2 , k X 3 ( s ) − X 1 ( s ) k 2 ) k λ k 2 for all λ ∈ R 2 , s ∈ [0 , T ]. Hence, k ( X i ( s ) T X i ( s )) − 1 k 2 ≤ c min( k X 2 ( s ) − X 1 ( s ) k 2 , k X 3 ( s ) − X 1 ( s ) k 2 ) − 1 , and since k X i ( s ) T k 2 2 , k X i ( s ) k 2 2 ≤ 2 max( k X 2 ( s ) − X 1 ( s ) k 2 , k X 3 ( s ) − X 1 ( s ) k 2 ) we get k D T i h ( s ) Φ s t,h d γ k k d γ k ≤ C max( k X 2 ( s ) − X 1 ( s ) k 2 , k X 3 ( s ) − X 1 ( s ) k 2 ) min( k X 2 ( s ) − X 1 ( s ) k 2 , k X 3 ( s ) − X 1 ( s ) k 2 for all d γ ∈ T T i h ( s ). Using again Assumption 5.1 one concludes that the quotient of edge lengths is uniformly b ounded. Also, one easily verifies for r, t ∈ [0 , T ] Φ r t,h γ = (Φ s t,h ◦ Φ r s,h ) γ and Φ t s,h Φ s t,h = id Γ h ( s ) . (5.4) W e hav e J s t,h T i h ( s ) = r det (D T i h ( s ) Φ s t,h ) T D T i h ( s ) Φ s t,h on the triangle T i h ( s ), where the deriv a- tiv e is represented w ith respect to an orthonormal basis B ( s ) of T T i h ( s ). As per ab ov e consid- erations the sp ectral radius of ( D i s,t ) T D i s,t is uniformly b ounded. Hence, there exists C h J > 0 suc h that J s t,h T i h ( s ) = q det B ( s ) T ( D i s,t ) T D i s,t B ( s ) ≤ C h J . Because we can switch s and t and since b y (5.4) we ha ve (Φ s t,h ) − 1 = Φ t s,h and thus 1 J s t,h = J t s,h ≤ C h J w e conclude ∀ s, t ∈ [0 , T ] : ∀ γ ∈ Γ h s 1 C h J ≤ J s t,h ( γ ) ≤ C h J . The tra jectories Φ s t,h γ , γ ∈ Γ h ( s ), the Jacobians J s t,h , and the entries of D i s,t are differentiable for t, b ecause the tra jectories X j ( t ), 1 ≤ j ≤ m h are, compare (5.1). Hence also D Γ( s ) Φ s t,h is differen tiable as a map into R 3 . The velocity V h ( γ , s ) = ∂ t Φ s t,h γ equals V at the v ertices and dep ends linearly on the co ordinates λ γ . As for the transp ort prop erty (5.3), it is a consequence of the piecewise linear transformations of the piecewise linear Ansatz functions ϕ i whic h implies φ 0 t,h ϕ i ( t ) = ϕ i (0), compare [DE07, Prop. 5.4]. 15 Remark 5.4. Similarly one can pro v e the map Φ s t,h : Γ h ( s ) → Γ h ( t ) to b e bi-Lipschitz with resp ect to the resp ectiv e metrics. The Lipsc hitz constan t L do es not dep end on s, t ∈ [0 , T ]. In order to compare functions defined on Γ h ( t ) with functions on Γ( t ), for sufficiently small h > 0 w e use the pro jection a t from (2.1) to lift a function y ∈ L 2 (Γ h ( t )) to Γ( t ) y l ( a t ( x )) = y ( x ) ∀ x ∈ Γ h ( t ) , and for y ∈ L 2 (Γ( t )) we define the in verse lift y l ( x ) = y ( a t ( x )) ∀ x ∈ Γ h ( t ) . F or small mesh parameters h the lift op eration ( · ) l : L 2 (Γ( t )) → L 2 (Γ h ) defines a linear homeomorphism with in verse ( · ) l . Moreov er, there exists c int > 0 suc h that 1 − c int h 2 ≤ k ( · ) l k 2 L ( L 2 (Γ( t )) ,L 2 (Γ h ( t ))) , k ( · ) l k 2 L ( L 2 (Γ h ( t )) ,L 2 (Γ( t ))) ≤ 1 + c int h 2 , (5.5) as shows the following lemma. Lemma and Definition 5.5. The r estriction of a t to Γ h ( t ) is a pie c ewise diffe omorphism.Denote by δ h the Jac obian of a t | Γ h ( t ) : Γ h ( t ) → Γ( t ) , i.e. δ h = dΓ dΓ h = | det( M ) | wher e M ∈ R 2 × 2 r epr e- sents the Derivative d a t ( x ) : T x Γ h ( t ) → T a ( x ) Γ( t ) with r esp e ct to arbitr ary orthonormal b ases of the r esp e ctive tangential sp ac e. F or smal l h > 0 ther e holds sup t ∈ [0 ,T ] sup Γ( t ) | 1 − δ h | ≤ C h 2 , In p articular a t | Γ h ( t ) is a diffe omorphism on e ach triangle T i h ( t ) . Now 1 δ h = dΓ h dΓ = | det( M − 1 ) | , so that by the change of variable formula Z Γ h ( t ) v l dΓ h ( t ) − Z Γ( t ) v dΓ( t ) = Z Γ( t ) v 1 δ l h − v dΓ( t ) ≤ c int h 2 k v k L 1 (Γ) . A lso ther e exists C > 0 such that 1. sup t ∈ [0 ,T ] k ˙ δ h ( t ) k L ∞ (Γ h ( t )) ≤ C h 2 , wher e the material derivative is to b e understo o d in the sense of Φ 0 t,h and 2. sup t ∈ [0 ,T ] kP ( I − R l h ) P k L ∞ (Γ( t )) ≤ C h 2 , wher e R h = 1 δ l h ( I − d H ) P h ( I − d H ) , H ij = ∂ x i x j d , and P = { δ ij − ν i ν j } n +1 i,j =1 and P h = { δ ij − ν h i ν h j } n +1 i,j =1 ar e the pr oje ctions on the r esp e ctive tangential sp ac e. Pr o of. W e summarize the pro of giv en in [DE07, Lemma 5.1] to extend it for the 1. assertion. A similar pro of can b e found in [DE10, Lemma 5.4]. F ollowing [DE07], we use lo cal co ordinates on a triangle e := T i h ( s ) . W.l.o.g. one can assume e ∈ R 2 × { 0 } . Since b oth d and ˙ d = d d t φ s t,h d equal zero at the corners, the linear in terp olates I h d , I h ˙ d v anish on e thus, using standard finite element approximation results, we get k d k L ∞ ( e ) = k d − I h d k L ∞ ( e ) ≤ ch 2 k d k H 2 , ∞ ( e ) ≤ ch 2 k d k C 1 , 1 ( N T ) 16 and similarly k ˙ d k L ∞ ( e ) ≤ ch 2 k d k C 2 , 1 ( N T ) . Also one has k ∂ x i d k L ∞ ( e ) ≤ ch k d k C 1 , 1 ( N T ) and k ∂ x i ˙ d k L ∞ ( e ) ≤ ch k d k C 2 , 1 ( N T ) (5.6) for i = 1 , 2 at an y point ( x 1 , x 2 , 0) ∈ e . Consider the basis B ( t ) = { ∂ x 1 Φ s t,h , ∂ x 2 Φ s t,h , ν h ( t ) } of R 3 , whose first tw o members span the tangen tial space of T i h ( t ). Let ( ν 1 ( t ) , ν 2 ( t ) , ν 3 ( t )) T represen t ν l ( t ) = ∇ d ( · , t ) with resp ect to B ( t ). Note that B ( s ) are the unit v ectors. W e hav e ( ν 1 ( t ) , ν 2 ( t )) T = M − 1 t (D ( x 1 ,x 2 ) Φ s t,h ) T ∇ d , with the uniformly p ositiv e definite matrix M t = (D ( x 1 ,x 2 ) Φ s t,h ) T D ( x 1 ,x 2 ) Φ s t,h . Now O ( h ) = D ( x 1 ,x 2 ) ˙ d = D ( x 1 ,x 2 ) d d t φ s t,h d = d d t D ( x 1 ,x 2 ) φ s t,h d = d d t ( φ s t,h ∇ d T D ( x 1 ,x 2 ) Φ s t,h ) = d d t ( φ s t,h ( ν 1 , ν 2 ) M t ) = ( ˙ ν 1 , ˙ ν 2 ) M + ( ν 1 , ν 2 ) d d t M t | {z } O ( h ) , where we used ν i ( γ , s ) = ∂ x i d ( γ , s ) and (5.6). W e subsume k ν i k L ∞ ( e ) , k ˙ ν i k L ∞ ( e ) ≤ ch k d k C 2 , 1 ( N T ) . One has D a t = Id − ∇ d ( ∇ d ) T − d ∇ 2 d and with ∇ d ( · , s ) = ( ν 1 ( s ) , ν 2 ( s ) , ν 3 ( s )) T w e compute (see [DE07]) δ h = k ∂ x 1 a t × ∂ x 2 a t k = | ν 3 | + dR ( ν, ∂ x 1 ν, ∂ x 2 ν ) = q 1 − ν 2 1 − ν 2 2 + dR ( ν, ∂ x 1 ν, ∂ x 2 ν ) = 1 + O ( h 2 ) with some smooth remainder function R and finally , since d = O ( h 2 ) k ˙ δ h k L ∞ ( e ) = − ν 1 ˙ ν 1 − ν 2 ˙ ν 2 p 1 − ν 2 1 − ν 2 2 + O ( h 2 ) L ∞ ( e ) ≤ C h 2 , where we used | ν i | , | ˙ ν i | ≤ C h , i = 1 , 2. F or a proof of 2. see [DE07, Lemma 5.1]. The next Lemma concerns the con tinuit y of the lift operations betw een L 2 L 2 (Γ h ) and L 2 L 2 (Γ) . Lemma 5.6. Using the pul l-b ack φ s t,h we c an define L 2 L 2 (Γ h ) as in L emma 3.4. F or sufficiently smal l h > 0 the lift op er ation ( · ) l c onstitutes a c ontinuous isomorphism b etwe en L 2 L 2 (Γ) and L 2 L 2 (Γ h ) with inverse ( · ) l . Ther e holds h f l , g l i L 2 L 2 (Γ h ) − h f , g i L 2 L 2 (Γ) ≤ c int h 2 |h f , g i L 2 L 2 (Γ) | . Pr o of. Let L 2 L 2 ( T i h ) , according to the flo w Φ s t,h as defined in Lemma 3.4. W e define L 2 L 2 (Γ h ) = S i ∈ I h L 2 L 2 ( T i h ) with the scalar pro duct R T 0 h· , ·i L 2 (Γ h ( t )) d t . Let Ψ t = Φ t 0 ◦ a t ◦ Φ 0 t,h denote the mapping b et w een Γ h 0 and Γ 0 induced b y the pro jection a t . By Assumption 5.2 and b y the construction of ¯ Φ 0 t and Φ 0 t,h is follo ws that Ψ t : Γ h 0 → Γ 0 is 17 a diffeomorphism on eac h triangle T i h (0) and globally one-to-one and onto. Also Ψ t and its spatial deriv ativ es are contin uous w.r.t. time t . W e will show that ¯ Ψ : Γ h 0 × [0 , T ] → Γ 0 × [0 , T ], ( γ , t ) 7→ (Ψ t ( γ ) , t ) is a piecewise diffeo- morphism whose Jacobian is b ounded a wa y from zero. By Assumption 5.1 we already hav e that ¯ Ψ is globally one-to-one. T ogether this implies that the pull-back with ¯ Ψ constitutes an isomorphism b et ween L 2 (Γ 0 × [0 , T ]) and L 2 (Γ h 0 × [0 , T ]). This again means that φ 0 t,h f l ∈ L 2 ([0 , T ] , L 2 (Γ h 0 )) ⇔ φ 0 t f ∈ L 2 ([0 , T ] , L 2 (Γ 0 )) . As to ¯ Ψ b eing al lo cal diffeomorphism, the sets ¯ T i h = S t ∈ [0 ,T ] T i h ( t ) are a partition of Γ h 0 × [0 , T ]. In the interior of eac h ¯ T i h the map ¯ Ψ is a diffeomorphism. In fact, let γ ∈ int( T i h ) for some 1 ≤ i ≤ m h . Compute D Γ h 0 × [0 ,T ] ¯ Ψ( γ ) = D Γ h 0 Ψ t ( γ ) ∂ t Ψ t ( γ ) 0 1 . W e ha ve D Γ h 0 Ψ t = D Γ( t ) Φ t 0 D Γ h ( t ) a t D Γ h 0 Φ 0 t,h . Its Jacobian is the pro duct of the Jacobians J t 0 , δ h , and J 0 t,h that are eac h b ounded aw ay from zero, uniformly in γ and t , compare (5.2), and the Lemmas 5.5 and 3.2. Hence the Jacobian of ¯ Ψ is bounded a wa y from zero. As to con tinuit y of ( · ) l , by Lemma 5.5 w e ha v e that h f l , g l i L 2 L 2 (Γ h ) − h f , g i L 2 L 2 (Γ) = Z [0 ,T ] Z Γ( t ) f g ( 1 δ l h − 1) dΓ( t ) d t ≤ c int h 2 |h f , g i L 2 Γ | . No w, instead of dealing with Problem (3.8) directly , w.l.o.g. w e consider the equation d d t Z Γ( t ) y ϕ dΓ( t ) + Z Γ( t ) ∇ Γ y · ∇ Γ ϕ + µy ϕ dΓ( t ) = h ˙ ϕ, y i L 2 (Γ( t )) + h f , ϕ i L 2 (Γ( t )) , (5.7) with ¯ µ ∈ R large enough to ensure µ := b + ¯ µ ≥ 1. Note that y solves (5.7) iff e ¯ µt y solv es (3.8) with righ t-hand side e ¯ µt f . In order to formulate the space-discretization of (5.7), consider the trial space H 1 V h = ( m h X i =1 ¯ y i ( t ) ϕ i ( t ) ∈ L 2 L 2 (Γ h ) ¯ y i ∈ H 1 ([0 , T ]) ) ' H 1 ([0 , T ]) m h . The following definition of w eak material deriv atives for functions in H 1 V h exploits the fact that H 1 V h is isomorph to H 1 ([0 , T ]) m h . It th us a v oids the issue of extending the theory from Section 3 for the smooth surfaces Γ( t ) to our Lipschitz appro ximations Γ h ( t ). Lemma and Definition 5.7. The we ak material derivative of v = P m h i =1 ¯ v i ( t ) ϕ i ( t ) ∈ H 1 V h is ˙ v = φ t 0 ,h ( φ 0 t,h v ) 0 = P m h i =1 ¯ v 0 i ( t ) ϕ i ( t ) . L et further w ∈ H 1 V h , then h v , w i L 2 (Γ h ( t )) is absolutely c ontinuous and d d t Z Γ h ( t ) v w dΓ h ( t ) = Z Γ h ( t ) ˙ v w + v ˙ w + v w div Γ h V h dΓ h ( t ) . 18 Pr o of. Observe ˙ v = φ t 0 ,h ( φ 0 t,h v ) 0 = φ t 0 ,h ( P m h i =1 ¯ v i ( t ) ϕ i (0)) 0 = φ t 0 ,h ( P m h i =1 ¯ v 0 i ( t ) ϕ i (0)) b ecause ( φ 0 t,h ϕ ( t )) 0 ( γ ) = d d t ϕ i (0)( γ ) = 0 for all γ ∈ Γ h 0 , as in (5.3). Apply Lemma 3.1 on eac h triangle to see that h ϕ i ( t ) , ϕ j ( t ) i L 2 (Γ h ( t )) is smo oth and d d t h ϕ i ( t ) , ϕ j ( t ) i L 2 (Γ h ( t )) = Z Γ h ( t ) ϕ i ϕ j div Γ h V h dΓ h ( t ) . No w h v , w i L 2 (Γ h ( t )) = m h X i,j =1 ¯ v i ( t ) ¯ w j ( t ) h ϕ i ( t ) , ϕ j ( t ) i L 2 (Γ h ( t )) and the second assertion follo ws, since ¯ v i , ¯ w j ∈ H 1 ([0 , T ]), 1 ≤ i, j ≤ m h . W e approximate (5.7) by the following semi-discrete Problem. Consider a piecewise smooth, globally Lipschitz approximation λ of µ l , such that λ ≥ 1. Find y ∈ H 1 V h suc h that for all ϕ ∈ H 1 V h d d t Z Γ h ( t ) y h ϕ dΓ h ( t ) + Z Γ h ( t ) ∇ Γ h y h · ∇ Γ h ϕ + λy h ϕ dΓ h ( t ) = h ˙ ϕ, y i L 2 (Γ h ( t )) + h f h , ϕ i L 2 (Γ h ( t )) , (5.8) and y h (0) = y h 0 ∈ V h (0). One p ossible choice would b e λ = µ l , f h = f l and y h 0 = P h 0 (( y 0 ) l ) with P h 0 the L 2 (Γ h 0 )-orthogonal pro jection onto V h (0). First of all let us state that (5.8) admits a unique solution in H 1 V h . This is b ecause for y h = P m h i =1 ¯ y i ϕ i w e can rewrite (5.8) as a smo oth linear ODE with non-smo oth inhomogeneit y for the coefficient vector ¯ y = { y i } m h i =1 ∈ H 1 ([0 , T ]) m h d d t ( M ( t ) ¯ y h ( t )) + ( A λ ( t )) ¯ y ( t ) = F ( t ) , y h (0) = y h 0 , (5.9) with smo oth mass and stiffness matrices M ( t ) = {h ϕ i , ϕ j i L 2 (Γ h ( t )) } m h i,j =1 and A λ ( t ) = n Z Γ h ( t ) ∇ Γ h ϕ i ∇ Γ h ϕ j + λϕ i ϕ j dΓ h ( t ) o m h i,j =1 , and right-hand side F ( t ) = {h f l , ϕ i i L 2 (Γ h ( t )) } m h i =1 ∈ L 2 ([0 , T ] , R m h ), compare also [DE07]. Observ e that we used the contin uit y of the co efficients ¯ y i ∈ H 1 ([0 , T ]) as well as ˙ ϕ i = 0. Existence of a solution ¯ y h ∈ H 1 ([0 , T ]) m h of (5.9) can be argued by v ariation of constants or, more generally , one can apply an existence result b y Carath´ eo dory , compare [CL55, Thms. 1.1+1.3]. Uniqueness of y h is a consequence of the follo wing lemma. Lemma 5.8 (Stabilit y) . L et y 0 ∈ L 2 (Γ 0 ) and f ∈ L 2 L 2 (Γ) , and let y h solve (5.8) with y h 0 ∈ V h (0) and f h = f l . Ther e exists C > 0 , such that for sufficiently smal l h > 0 the solution satisfies k y h k 2 L 2 (Γ h ( T )) + Z T 0 Z Γ h ( ∇ Γ h y h ) 2 + λy 2 h dΓ h ( t )d t ≤ C k y h 0 k 2 L 2 (Γ h 0 ) + k f k 2 L 2 L 2 (Γ) , as wel l as k ˙ y h k 2 L 2 L 2 (Γ h ) + ess sup t ∈ [0 ,T ] Z Γ h ( ∇ Γ h y h ) 2 + λy 2 h dΓ h ( t ) ≤ C k y h 0 k 2 H 1 (Γ h 0 ) + k f k 2 L 2 L 2 (Γ) . 19 Pr o of. F rom the definition of M and A λ using Lemma 3.1 on eac h triangle T i h ( t ) there follo ws M 0 ( t ) = { R Γ h ( t ) ϕ i ϕ j div Γ h ( t ) V h dΓ h ( t ) } m h i,j =1 and ( d d t A λ ) ij = Z Γ h ( t ) −∇ Γ h ϕ i D Γ h V h + D Γ h V T h ∇ Γ h ϕ j + ˙ λϕ i ϕ j + . . . +( ∇ Γ h ϕ i ∇ Γ h ϕ j + λϕ i ϕ j ) div Γ h V h dΓ h ( t ) . Multiply (5.9) by ¯ y 0 to obtain k ˙ y h k 2 L 2 (Γ h ( t )) z }| { ¯ y 0 M ¯ y 0 + 1 2 d d t ( ¯ yA λ ¯ y ) = − ¯ y 0 M 0 ¯ y + 1 2 ¯ yA 0 λ ¯ y + F ¯ y 0 ≤ C k y h k 2 H 1 (Γ( t )) | {z } ≤ ¯ y A λ ¯ y + k f l k 2 L 2 (Γ h ( t )) + 1 2 k ˙ y h k 2 L 2 (Γ h ( t )) , and a Gronw all argumen t yields the second estimate. Multiply (5.9) b y ¯ y and pro ceed similarly to prov e the first. Ob viously the material deriv ative dep ends on the evolution of the surface, i.e. different deriv a- tiv es arise according to whether φ s t or φ s t,h is applied to pull bac k a function to a fixed domain. In order to compare ˙ z l h with ( ˙ z h ) l w e need the following lemma. Lemma 5.9. L et y = P m h i =1 ¯ y i ϕ i ∈ H 1 V h . The lift y l lies in W Γ with ˙ y l ∈ L 2 L 2 (Γ) , and for a.e. t ∈ [0 , T ] ther e holds ˙ y l − ( ˙ y ) l ≤ C h 2 k∇ Γ( t ) y l k , a.e. on Γ( t ) . Pr o of. W e start by computing the material deriv ativ es of ¯ ϕ i ( x, t ) : N T → R , ¯ ϕ i ( x, t ) = ϕ l i ( a t ( x ) , t ), i.e. the constan t extension of the trial function ϕ i , 1 ≤ i ≤ m h , along the normal field of Γ( t ), compare the proof of [DE07, Thm. 6.2]. Observe that ϕ l i is not smo oth along the edges of patc hes a t ( T j h ( t )). How ev er, ϕ l i is smo oth in the (relative) in terior of all a t ( T j h ( t )) . Deriv e ¯ ϕ i at γ ∈ relint( T j h ( t )) to obtain ∇ ¯ ϕ i ( γ , t ) = ∇ ¯ ϕ i ( a t ( γ ) , t ) I d − ∇ d ( γ , t ) ∇ d ( γ , t ) T − d ( γ , t ) ∇ 2 d ( γ , t ) ∂ t ¯ ϕ i ( γ , t ) = ∂ t ¯ ϕ ( a t ( γ ) , t ) + ∇ ¯ ϕ i ( a t ( γ ) , t ) ( − ∂ t d ( γ , t ) ∇ d ( γ , t ) − d ( γ , t ) ∂ t ∇ d ( γ , t )) . (5.10) By construction of ¯ ϕ i w e ha ve ∇ ¯ ϕ i ( a t ( γ )) ∇ d ( γ , t ) = ∇ Γ ϕ l i ( a t ( γ )) ∇ ν ( a t ( γ ) , t ) = 0 since ¯ ϕ i is constan t along orthogonal lines through Γ. Also, from d (Φ 0 t ( γ ) , t ) ≡ 0 it follows ∂ t d = −∇ dV . The (strong) material deriv atives do not depend on the extension ¯ ϕ i , but only on the v alues on Γ and Γ h , resp ectiv ely . One gets ˙ ϕ l i ( a t ( γ ) , t ) = ∂ t ¯ ϕ i ( a t ( γ ) , t ) + ∇ ¯ ϕ i ( a t ( γ ) , t ) V ( a t ( γ ) , t ) and ˙ ϕ i ( γ , t ) = ∂ t ¯ ϕ i ( γ , t ) + ∇ ¯ ϕ i ( γ , t ) V h ( γ , t ) whic h together with (5.10) leads us to ˙ ϕ l i = ( ˙ ϕ i ) l + V − V h + d (( ∇ 2 d ) V h + ∂ t ∇ d ) ∇ Γ( t ) ϕ l i , (5.11) in the relativ e interior of the patc hes a t ( T j h ( t )), j ∈ I h . 20 In order to pro ve that the pull-back ˜ ϕ := φ 0 t ϕ l i lies in C 1 ([0 , T ] , L 2 (Γ 0 )) ∩ C ([0 , T ] , H 1 (Γ 0 )) for all 1 ≤ i ≤ m h w e proceed in four steps. 1. W e show that ˜ ϕ is globally Lipsc hitz on Γ 0 × [0 , T ]. Observe, that (5.10) implies that all deriv ativ es of ˜ ϕ exist and are b ounded on the interior of patches P i h ( t ) = Φ t 0 ( a t ( T i h ( t ))). Since Ψ t = Φ t 0 ◦ a t ◦ Φ 0 t,h : Γ h 0 × [0 , T ] → Γ 0 smo othly maps the edges of Γ h 0 in to Γ 0 the domains S t ∈ [0 ,T ] P i h ( t ) × { t } ⊂ Γ 0 × [0 , T ] hav e piecewise C 1 -b oundaries. Also, ˜ ϕ is con tinuous and we are in the situation to apply Stoke’s theorem to confirm ˜ ϕ ∈ W 1 , ∞ (Γ 0 × [0 , T ]). By Morrey’s lemma, for a formulation on manifolds see [MMV98], w e conclude ˜ ϕ ∈ C 0 , 1 (Γ 0 × [0 , T ]). 2. No w as to the time deriv ativ e, fix > 0 and t ∈ (0 , T ). Let L > 0 denote the global Lipsc hitz constan t of ˜ ϕ on Γ 0 × [0 , T ] and c ho ose η > 0 sufficiently small such that P i ∈ I h meas( P i h \ P i h,η ) ≤ 2 / 8 L 2 where P i h,η = γ ∈ P i h B η ( γ ) ⊂ P i h , the balls B η ( γ ) b eing taken with resp ect to the metric of Γ 0 . Now, as stated abov e, the patc hes P i h ( t ) = Ψ( t )( T i h ) mov e con- tin uously across Γ 0 , and we can choose K sufficien tly small suc h that for all i ∈ I h and k ∈ ( − K, K ) w e ha ve P i h,η ( t ) ⊂ P i h ( t + k ). The deriv ativ e ∂ t ˜ ϕ ( γ , t ) = φ 0 t ˙ ϕ l i whic h is defined a.e. on Γ 0 × [0 , T ] then is con tinuous on the compact set K η = S i ∈ I h P i h,η ( t ) × [ t − K , t + K ] and we hav e 1 k 2 Z Γ 0 ( ˜ ϕ ( t + k ) − ˜ ϕ ( t ) − ∂ t ˜ ϕ ( t ) k ) 2 dΓ 0 = 1 k 2 X i ∈ I h Z P i h,η ( ˜ ϕ ( t + k ) − ˜ ϕ ( t ) − ∂ t ˜ ϕ ( t ) k ) 2 dΓ 0 + Z P i h \ P i h,η ( ˜ ϕ ( t + k ) − ˜ ϕ ( t ) − ∂ t ˜ ϕ ( t ) k ) 2 dΓ 0 . Substituting ˜ ϕ ( γ , t + k ) − ˜ ϕ ( γ , t ) = ∂ t ϕ ( γ , t ) k + R 1 0 ( ∂ t ϕ ( γ , t + τ k ) − ∂ t ˜ ϕ ( γ , t )) k d τ on P i h, lik e in the proof of Lemma 3.6 we c ho ose k small enough for sup τ ∈ [0 , 1] k ∂ t ϕ ( t + τ k ) − ∂ t ˜ ϕ ( t ) k 2 ∞ ≤ 2 2meas(Γ 0 ) , (5.12) whic h is p ossible by uniform con tinuit y of ∂ t ˜ ϕ on K η . Estimating the second addend b y (2 Lk ) 2 P i ∈ I h meas( P i h \ P i h,η ) ≤ 2 / 2 yields lim sup k → 0 1 k k ˜ ϕ ( t + k ) − ˜ ϕ ( t ) − ∂ t ˜ ϕ ( t ) k k L 2 (Γ 0 ) ≤ . for every > 0. Hence ˜ ϕ is differen tiable in to L 2 (Γ 0 ) with deriv ative ∂ t ˜ ϕ . 3. Th us in order to show ˜ ϕ ∈ C 1 ([0 , T ] , L 2 (Γ 0 )) it remains to prov e that ∂ t ˜ ϕ : [0 , T ] → L 2 (Γ 0 ) is contin uous. By (5.10) ∂ t ˜ ϕ is essen tially b ounded on Γ 0 × [0 , T ]. Let M = k ∂ t ˜ ϕ k L ∞ (Γ 0 × [0 ,T ]) . F or > 0 c ho ose η > 0 sufficiently small suc h that P i ∈ I h meas( P i h \ P i h,η ) ≤ 2 / 8 M 2 . As ab o v e, c ho ose K > 0 and K η accordingly . Now, choosing k > 0 small enough such that (5.12) holds one arriv es at k ∂ t ˜ ϕ ( t + k ) − ∂ t ˜ ϕ ( t ) k 2 L 2 (Γ 0 ) = X i ∈ I h Z P i h,η ( ∂ t ˜ ϕ ( t + k ) − ∂ t ˜ ϕ ( t )) 2 dΓ 0 . . . + Z P i h \ P i h,η ( ∂ t ˜ ϕ ( t + k ) − ∂ t ˜ ϕ ( t )) 2 dΓ 0 ≤ 2 . 21 4. Con tinuit y of ˜ ϕ : [0 , T ] → H 1 (Γ 0 ) follo ws similarly . In fact, the spatial partial deriv ativ es of ˜ ϕ exhibit the same piecewise smo oth structure as ∂ t ˜ ϕ . Finally , ˜ ϕ = φ 0 t ϕ l i ∈ C 1 ([0 , T ] , L 2 (Γ 0 )) ∩ C ([0 , T ] , H 1 ) implies ¯ y i φ 0 t ϕ l i ∈ W 0 (0 , T ), and w e conclude y l ∈ W Γ as well as ˙ y ∈ L 2 L 2 (Γ) . The estimate now is a consequence of (5.11). Before we pro ceed to the main result of this section, w e need to understand the appro ximation of elliptic equations on Γ( t ) b y finite elements on Γ h ( t ). Lemma 5.10. F or t ∈ [0 , T ] and g ∈ L 2 (Γ( t )) , g h ∈ L 2 (Γ h ( t )) c onsider Z Γ( t ) ∇ Γ Z g · ∇ Γ ϕ + µZ g ϕ dΓ( t ) = h g , ϕ i L 2 (Γ( t )) , ∀ ϕ ∈ H 1 (Γ( t )) (5.13) and Z Γ h ( t ) ∇ Γ h Z g h h · ∇ Γ h ϕ + µ l Z g h h ϕ dΓ h ( t ) = h g h , ϕ i L 2 (Γ h ( t )) , ∀ ϕ ∈ V h ( t ) (5.14) with unique solutions Z g ∈ H 1 (Γ( t )) and Z g h h ∈ V h ( t ) . The solution op er ators S ( t ) : L 2 (Γ( t )) → L 2 (Γ( t )) , g 7→ Z g and S h ( t ) : L 2 (Γ h ( t )) → V h ⊂ L 2 (Γ h ( t )) , g h 7→ Z g h h ar e self-adjoint. Ther e exists C indep endent of t ∈ [0 , T ] such that 1. ∀ ϕ ∈ V h ( t ) : |k ϕ l k 2 H 1 (Γ( t )) − k ϕ k 2 H 1 (Γ h ( t )) | ≤ C h 2 k ϕ l k 2 H 1 (Γ( t )) < ∞ as wel l as 2. k ( · ) l S h ( t )( · ) l ∗ − S ( t ) k L ( L 2 (Γ( t )) ,L 2 (Γ( t ))) ≤ C h 2 and 3. k ( · ) l S h ( t )( · ) l ∗ − S ( t ) k L ( L 2 (Γ( t )) ,H 1 (Γ( t ))) ≤ C h . Pr o of. The op erators b eing w ell-defined and self-adjoin t follo ws by standard arbumen ts. As- sertion 1. follows from Lemma 5.5[ 2. ], since ϕ l is contin uous and piecewise smo oth on Γ( t ) and thus lies in H 1 (Γ( t )) with Z Γ h ( t ) k∇ Γ h ϕ k 2 dΓ h ( t ) = Z Γ( t ) k∇ Γ ϕ l k 2 dΓ( t ) + Z Γ( t ) ∇ Γ ϕ l R l h − Id ∇ Γ ϕ l dΓ( t ) , for details see for example [DE07, Lem. 5.2] and proof. F or a pro of of 2. and 3. see [Dzi88, Thm. 8] and the discussion of ( · ) l and ( · ) l ∗ preceding Lemma 4 in aforemen tioned article. The fact that C do es not dep end on t is a consequence of Assumption 2.1 and 5.1. Theorem 5.11. L et Assumption 2.1, 5.1 and 5.2 hold and let y ∈ W Γ solve (5.7) for some f ∈ L 2 L 2 (Γ) , y 0 ∈ H 1 (Γ 0 ) , such that (3.10) holds. L et y h solve (5.8) with λ = µ l and f h = f l and some appr oximation y h 0 of ( y 0 ) l . Ther e exists C > 0 indep endent of y and h such that k y l h − y k 2 L 2 L 2 (Γ) ≤ C k y h (0) − y l (0) k 2 L 2 (Γ h 0 ) + h 4 k y 0 k 2 H 1 (Γ 0 ) + k y h 0 k 2 H 1 (Γ h 0 ) + k f k 2 L 2 L 2 (Γ) . 22 Pr o of. Define z = S ( t ) y l h − y and z h = S h ( t ) ( δ h ( y h − y l )) with S ( t ) and S h ( t ) as in Lemma 5.10. Now δ h ( y h − y l ) = ( · ) l ∗ y l h − y and hence it follows from Lemma 5.10[ 2. ] that k z l h − z k L 2 (Γ( t )) = k (( · ) l S h ( · ) l ∗ − S )( y l h − y ) k L 2 (Γ( t )) ≤ C h 2 k y l h − y k L 2 (Γ( t )) , (5.15) Observ e no w for z h = P m h i =1 ¯ z i ϕ i using Lemma 5.9 we get Y = {h y l h − y , ϕ l i i L 2 (Γ( t )) } m h i =1 ∈ H 1 ([0 , T ]) m h , and thus ¯ z = ( A λ ) − 1 Y ∈ H 1 ([0 , T ]) m h . Hence ¯ z ∈ H 1 V h and again b y Lemma 5.9 z l h ∈ W Γ as well as ˙ z l h ( t ) ∈ L 2 (Γ( t )). W e can no w test (5.7) with z l h , using (5.13) in the pro cess, to obtain d d t h y , z l h i L 2 (Γ( t )) + h y , y l h − y i L 2 (Γ( t )) = h ˙ z l h , y i L 2 (Γ( t )) + h f , z l h i L 2 (Γ( t )) . . . + h− ∆ Γ y + µy , z − z l h i L 2 (Γ( t )) , (5.16) and testing (5.8) with z h giv es d d t h y h , z h i L 2 (Γ h ( t )) + h y l h , y l h − y i L 2 (Γ( t )) = h ˙ z h , y h i L 2 (Γ h ( t )) + h f l , z h i L 2 (Γ h ( t )) . (5.17) No w, since the strong material deriv ative ˙ δ h exists and is con tinuous on eac h triangle T i h ( t ), the scalar products h ϕ i , ϕ j δ h i L 2 (Γ h ( t )) , 1 ≤ i, j ≤ m h , are differen tiable with d d t h ϕ i , ϕ j δ h i L 2 (Γ h ( t )) = Z Γ h ( t ) δ h ϕ i ϕ j div Γ h V h + ˙ δ h ϕ i ϕ j dΓ h ( t ) and we hav e d d t h y l h , z l h i L 2 (Γ( t )) = d d t h y h , z h δ h i L 2 (Γ h ( t )) = d d t h y h , z h i L 2 (Γ h ( t )) + h y h , ˙ z h ( δ h − 1) i L 2 (Γ h ( t )) + h y h , z h ˙ δ h i L 2 (Γ h ( t )) . . . + h ˙ y h , z h ( δ h − 1) i L 2 (Γ h ( t )) + h y h , z h div Γ h V h ( δ h − 1) i L 2 (Γ h ( t )) . Hence, we can rewrite (5.17) by means of the L 2 (Γ( t )) d d t h y l h , z l h i L 2 (Γ( t )) + h y l h , y l h − y i L 2 (Γ( t )) = h ( ˙ z h ) l , y l h i L 2 (Γ( t )) + h f , z l h i L 2 (Γ( t )) + R h , (5.18) with R h = h y h , z h ˙ δ h i L 2 (Γ h ( t )) + h ˙ y h , z h ( δ h − 1) i L 2 (Γ h ( t )) + h y h , z h div Γ h V h ( δ h − 1) i L 2 (Γ h ( t )) . . . + h f l , z h (1 − δ h ) i L 2 (Γ h ( t )) . Subtracting (5.16) from (5.18) yields d d t h y l h − y , z l h i L 2 (Γ( t )) + k y l h − y k 2 L 2 (Γ( t )) = h ( ˙ z h ) l − ˙ z l h , y i L 2 (Γ( t )) + h ˙ z h , ( y h − y l ) δ h i L 2 (Γ h ( t )) . . . + R h + h− ∆ Γ y + µy , z l h − z i L 2 (Γ( t )) . 23 F rom (5.14) w e know h ˙ z h , δ h ( y h − y l ) i L 2 (Γ h ( t )) = ¯ z 0 h A λ ¯ z h = 1 2 d d t ( ¯ z h A λ ¯ z h ) − 1 2 ¯ z h A 0 λ ( t ) ¯ z h , in the notation of (5.9). Now, using (5.15) and | R h | ≤ C h 2 k z h k L 2 (Γ h ( t )) k y h k L 2 (Γ h ( t )) + k ˙ y h k L 2 (Γ h ( t )) + k f l k L 2 (Γ h ( t )) w e can estimate 1 2 d d t ( ¯ z h A λ ( t ) ¯ z h ) + k y l h − y k 2 L 2 (Γ( t )) ≤ C h 2 k y k L 2 (Γ( t )) k∇ Γ h ( t ) z h k ( L 2 (Γ h ( t ))) n =1 . . . + k z h k 2 H 1 (Γ h ( t )) + h 2 k y k H 2 (Γ( t )) k y h − y l k L 2 (Γ h ( t )) + | R h | ≤ 1 2 k y h − y l k 2 L 2 (Γ h ( t )) + C ¯ z h A λ ( t ) ¯ z h . . . + h 4 k y h k 2 L 2 (Γ h ( t )) + k ˙ y h k 2 L 2 (Γ h ( t )) + k f l k 2 L 2 (Γ h ( t )) + k y k 2 H 2 (Γ( t )) . W e can no w apply Gron wall’s lemma for [ ¯ z h A λ ( t ) ¯ z h ] T 0 + Z [0 ,T ] k y l h − y k 2 L 2 (Γ( t )) d t ≤ C h 4 Z [0 ,T ] k y h k 2 L 2 (Γ h ( t )) + k ˙ y h k 2 L 2 (Γ h ( t )) + k f l k 2 L 2 (Γ h ( t )) + k y k 2 H 2 (Γ( t )) d t , (5.19) and with the stability estimate (3.10) and the Lemmas 5.8 and 5.6 we finally arrive at Z [0 ,T ] k y l h − y k 2 L 2 (Γ( t )) d t ≤ C = h y l h (0) − y (0) ,z h i L 2 (Γ 0 ) z }| { Z Γ h 0 ∇ Γ h 0 z h 2 + λz 2 h dΓ h 0 . . . + h 4 k y 0 k 2 H 1 (Γ 0 ) + k y h 0 k 2 H 1 (Γ h 0 ) + k f k 2 L 2 L 2 (Γ) ! . (5.20) Apply again (5.15) to pro v e the lemma. Remark 5.12. Dep ending on the regularity of y 0 , p ossible c hoices of y h 0 yielding O ( h 2 )- con vergence of y l h comprehend the piecewise interpolation of ( y 0 ) l and the L 2 (Γ 0 )-orthogonal pro jection of ( y 0 ) l on to V h (0). F or the latter, the term inv olving z h in (5.20) v anishes com- pletely , but it’s H 1 (Γ 0 )-stabilit y requires further inv estigation. The order of conv ergence is lo wer, if the solution of (5.7) do es not satisfy the additional regularit y estimate (3.10). Theorem 5.13. L et Assumption 2.1, 5.1 and 5.2 hold and let y ∈ W Γ solve (5.7) for f ≡ 0 , and y 0 ∈ L 2 (Γ 0 ) . Ther e exists C > 0 indep endent of y and h such that for the solution y h of (5.8) with y h 0 = P h 0 (( y 0 ) l ) and f h ≡ 0 ther e holds k y l h − y k 2 L 2 L 2 (Γ) ≤ C h 2 + sup t ∈ [0 ,T ] k λ l − µ k 2 L ∞ (Γ( t )) ! k y 0 k 2 L 2 (Γ 0 ) . 24 Pr o of. W e proceed as in the pro of of Theorem 5.11 up to (5.16) whic h now reads d d t h y , z l h i L 2 (Γ( t )) + h y , y l h − y i L 2 (Γ( t )) = h ˙ z l h , y i L 2 (Γ( t )) + h− ∆ Γ y + µy , z − z l h i H − 1 (Γ( t )) ,H 1 (Γ( t )) , Analogously to (5.15) we can apply Lemma 5.10[ 3. ] and estimate the last term through |h− ∆ Γ y + λy , z l h − z i H − 1 (Γ( t )) ,H 1 (Γ( t )) | ≤ k − ∆ Γ y + λy k H − 1 (Γ( t )) k z l h − z k H 1 (Γ( t )) . . . ≤ k − ∆ Γ y + λy k H − 1 (Γ( t )) C h k y l h − y k L 2 (Γ( t )) . On the other hand (5.18) b ecomes d d t h y l h , z l h i L 2 (Γ( t )) + h y l h , y l h − y i L 2 (Γ( t )) = h ( ˙ z h ) l , y l h i L 2 (Γ( t )) + h ( µ l − λ ) y h , z h i L 2 (Γ h ( t )) + R h . Con tinue as in the pro of of Theorem 5.11 to finally arrive at the analogue of (5.19) [ ¯ z h A λ ( t ) ¯ z h ] T 0 + Z [0 ,T ] k y l h − y k 2 L 2 (Γ( t )) d t ≤ C ( h 4 + sup t ∈ [0 ,T ] k λ l − µ k 2 L ∞ (Γ( t )) ) Z [0 ,T ] k y h k 2 L 2 (Γ h ( t )) d t . . . + C h 2 Z [0 ,T ] k y k 2 H 1 (Γ( t )) + h 2 k ˙ y h k 2 L 2 (Γ h ( t )) d t , Note that due to Lemma 5.5 | ¯ z h (0) A λ (0) ¯ z h (0) | = |h y l h (0) − y (0) , z h i L 2 (Γ 0 ) | ≤ =0 since y h 0 = P h 0 (( y 0 ) l ) z }| { |h y h (0) − y l (0) , z h i L 2 (Γ h 0 ) | + C h 2 k y 0 k 2 L 2 (Γ 0 ) . In view of Lemma 5.8 it remains to b ound R T 0 h 2 k ˙ y h k 2 L 2 (Γ h ( t )) d t . Again thanks to Lemma 5.8 w e ha v e Z T 0 k ˙ y h k 2 L 2 (Γ h ( t )) d t ≤ C k y h 0 k 2 H 1 (Γ 0 ) . But an inv erse estimate, compare for example [CL91, Thm. 17.2], yields k y h 0 k H 1 (Γ h 0 ) ≤ C h k y h 0 k L 2 (Γ h 0 ) , and b ecause of the con tinuit y of the lift ( · ) l and of the L 2 -pro jection P h 0 the theorem follows. 6 Implicit Euler discretization In order to solv e (3.8) we apply a vertical method of lines. The time discretization is carried out b y discontin uous Galerkin – implicit Euler discretization in L 2 L 2 (Γ h ) . F or N ∈ N , consider an equidistant partition I n = ( t n − 1 , t n ] of [0 , T ] with 1 ≤ n ≤ N , k = T N and t n = k n . The trial space for the discontin uous Galerkin metho d (DGM) is the space of ’piecewise constant’ functions W h k = n v ∈ L 2 L 2 (Γ h ) ∀ 1 ≤ n ≤ N : ∃ v n ∈ V h ( t n ) : v ≡ φ t t n ,h v n on I n o . 25 Note that in the follo wing w e will omit the op erators φ s t,h when dealing with functions w ∈ W h k . Also, to further simplify notation let a ( t ; ψ , ϕ ) = R Γ h ( t ) ∇ Γ h ψ · ∇ Γ h ϕ + λψ ϕ dΓ h ( t ) as well as h· , ·i n = h· , ·i L 2 (Γ h ( t n )) . W.l.o.g. w e temp orarily assume inf t ∈ [0 ,T ] ,γ ∈ Γ h ( t ) λ ( γ , t ) > M + 2 , (6.1) with M = sup τ ∈ [0 ,T ] k div Γ h ( τ ) V h k L ∞ (Γ h ( τ )) suc h that a ( t ; ϕ, ϕ ) − M k ϕ k 2 L 2 (Γ h ( t )) ≥ k ϕ k 2 H 1 (Γ h ( t )) + k ϕ k 2 L 2 (Γ h ( t )) for all t ∈ [0 , T ], h > 0 and all ϕ ∈ H 1 (Γ h ( t )). T o motiv ate the DGM insert the Ansatz y k h ( t ) = P N n =1 φ t t n ,h ( y n 1 I n ) ∈ W h k with y n ∈ V h ( t n ) in to (5.8). If one understands the time-deriv ative in (5.8) in a distributional sense, in tegration ov er time formally yields h y n − y n − 1 , ϕ i n − 1 + Z I n a ( t ; y n , ϕ ) + h y n div Γ h V h , ϕ i L 2 (Γ h ( t )) d t = Z I n h f h , ϕ i L 2 (Γ h ( t )) d t , for smo oth test functions ϕ . Instead, apply test functions ϕ ∈ W h k and use ˙ y n = ˙ ϕ n = 0 to obtain Z I n h y n div Γ h V h , ϕ i L 2 (Γ h ( t )) d t = h y n , ϕ n i n − h y n , ϕ n i n − 1 . Finally , to arrive at a computable sc heme, lump the In tegral o ver a ( t, · , · ) and replace the righ t-hand side appropriately . F or arbitrary parameters y h 0 ∈ V h (0) and f h ∈ L 2 L 2 (Γ h ) w e rewrite the sc heme as y 0 f = y h 0 , ∀ ϕ ∈ W h k , 1 ≤ n ≤ N : h y n f , ϕ i n − h y n − 1 f , ϕ i n − 1 + k a n ( y n f , ϕ ) = Z I n h φ t n t,h f h , ϕ i n d t , (6.2) where y h 0 , f h , and λ are the same as in (5.8). F or the appro ximation of the in tegral a n w e assume a n ( ψ , ϕ ) = a ( t n ; φ t n t,h ψ , φ t n t,h ϕ ) + r n ( ψ , ϕ ), with a remainder | r n ( ψ , ϕ ) | ≤ C r k k ψ k H 1 (Γ h ( t n )) k ϕ k H 1 (Γ h ( t n )) . (6.3) One p ossible choice is r n ≡ 0 for 1 ≤ n ≤ N , but when it comes to approximating an adjoin t equation such as (4.3) w e will wan t to c ho ose r more freely . In order to pro of con vergence of the scheme (6.2) in L 2 L 2 (Γ h ) w e mak e use of stability prop erties of the adjoin t sc heme z N +1 g = z T , ∀ ϕ ∈ W h k , 1 ≤ n ≤ N : h z n g , ϕ i n − h z n +1 g , ϕ i n + k a n ( ϕ, z n g ) = Z I n h φ t n t,h g h , ϕ i n d t . (6.4) with g h ∈ L 2 L 2 (Γ h ) , z T ∈ V h ( T ). In Section 7 it will b e imp ortant that given snapshots { Γ h ( t n ) } N n =1 of the surface (6.2) and (6.4) can b e ev aluated exactly for certain righ t-hand sides f h and g h , e.g. g h ∈ W h k . Let us introduce the mean v alue of a function y ∈ L 2 L 2 (Γ h ) o ver an interv al I n . 26 Lemma and Definition 6.1. L et φ s t,h denote the pul lb ack op er ator asso ciate d to the flow Φ s t,h as in L emma 3.2 and let s ∈ [0 , T ] . The me an value of a function y ∈ L 2 L 2 (Γ h ) is define d as ¯ y n ( s ) = 1 k R I n φ s t,h y d t for t ∈ I n . Be c ause Z I n φ s t,h y d t = Z I n φ s r,h φ r t,h y d t = φ s r,h Z I n φ r t,h y d t | {z } ¯ y n ( r ) , ¯ y n do es not dep end on s ∈ [0 , T ] . Similarly one could define the mean v alue of y ∈ W Γ if one were to in v estigate a horizontal metho d-of-lines approac h. No w for y 0 ≡ 0, z T ≡ 0 the schemes are adjoint in the sense k N X n =1 h ¯ f n h , z g i n = k N X n =1 h ¯ g n h , y f i n , i.e. the discrete solution op erators f h 7→ y f and g h 7→ z g are adjoin t as op erators from ( L 2 L 2 (Γ h ) , h· , ·i h,k ) into itself, where L 2 L 2 (Γ h ) is equipp ed with the scalar product h f , g i h,k = k N X n =1 Z I n h ( φ t n t,h f ) , ( φ t n t,h g ) i n d t . (6.5) Lemma 6.2. L et k · k h,k denote the norm induc e d by h· , ·i h,k . The norms k · k L 2 L 2 (Γ h ) and k · k h,k on L 2 L 2 (Γ h ) ar e e quivalent and ther e holds h f , g i h,k − h f , g i L 2 L 2 (Γ h ) ≤ C k h f , g i L 2 L 2 (Γ h ) . Pr o of. The result follows from the iden tity Z [0 ,T ] Z Γ h ( t ) f g dΓ h ( t ) d t = N X n =1 Z I n Z Γ h ( t n ) ( φ t n t,h f )( φ t n t,h g ) J t t n ,h dΓ h ( t n ) d t , and J t n t b eing Lipsc hitz with J t n t n ,h ≡ 1. Note also that for z ∈ W h k , since ˙ z n = 0 on I n , w e can apply the mean v alue theorem to obtain for some t ∈ I n |k z n k 2 L 2 (Γ h ( t )) − k z n k 2 n | = k |h z n div Γ h (Θ n ) V h , z n i L 2 (Γ h (Θ n )) | ≤ M k k z n k 2 L 2 (Γ h (Θ n )) (6.6) with Θ n ∈ ( t, t n ). Apply (6.6) to itself to obtain for some ˜ Θ n ∈ (Θ n , t n ) |k z n k 2 L 2 (Γ h ( t )) − k z n k 2 n | ≤ M k k z n k 2 n + k z n k 2 L 2 (Γ h (Θ n )) − k z n k 2 n ≤ M k k z n k 2 n + M k k z n k 2 L 2 (Γ h ( ˜ Θ n )) ≤ M k 1 + C L 2 (Γ h ) M k k z n k 2 n . (6.7) A similar con tinuit y assertion holds for the H 1 (Γ h ( t ))-norm, as sho ws the follo wing lemma. 27 Lemma 6.3. L et y , z ∈ H 1 V h , ˜ λ ∈ C (Γ h ( s ) × [0 , T ]) , and λ = φ t s,h ˜ λ . Ther e exists C > 0 such that for every s ∈ I n Z I n a ( s ; φ s t,h y , φ s t,h z )d t − Z I n a ( t ; y , z )d t ≤ C k Z I n k φ s t,h y k H 1 (Γ h ( s )) k φ s t,h z k H 1 (Γ h ( s )) d t , i.e. for z ∈ W h k we have k a ( s ; ¯ y n , z n ) − Z I n a ( t ; y , z )d t ≤ C k Z I n k φ s t,h y k H 1 (Γ h ( s )) k z n k H 1 (Γ h ( s )) d t . In p articular with λ ≡ 1 the estimates hold for a ( t ; ϕ, ϕ ) = k ϕ k 2 H 1 (Γ h ( t )) . Pr o of. W e abbreviate ˜ ∆( s, t ) = D Γ h ( s ) Φ s t,h ( D Γ h ( s ) Φ s t,h ) T J s t,h . Since ˙ z n ≡ 0 w e ha v e | Z I n a ( s ; φ s t,h y , φ s t,h z )d t − Z I n a ( t ; y , z )d t | = . . . = Z I n Z Γ h ( s ) ∇ Γ h φ s t,h y ˜ ∆( s, s ) − ˜ ∆( s, t ) ∇ Γ h φ s t,h z + λφ s t,h y ( J s s,h − J s t,h ) φ s t,h z dΓ h ( s )d t . The lemma follo ws from the fact that Φ s t,h it linear on eac h T i h ( s ) and globally Lipsc hitz in time, as b y Lemma 5.3. Let us form ulate a crucial stability assertion for the adjoint sc heme (6.4). Lemma 6.4. L et z ∈ W h k solve (6.4) with right-hand side g ∈ L 2 L 2 (Γ h ) . F or sufficiently smal l k > 0 ther e exists C > 0 , dep ending only on Γ , such that max 1 ≤ n ≤ N a ( t n ; z n , z n ) + 1 k N X n =1 k z n +1 − z n k 2 n + k N X n =1 k z n k 2 H 1 (Γ( t n )) ≤ C k g k 2 h,k . Pr o of. Apply (6.4) to z n to obtain h z n − z n +1 , z n i n + k a n ( z n , z n ) = Z I n h φ t n t,h g , z n i n d t . This leads to 1 2 k z n k 2 n + k z n +1 − z n k 2 n − k z n +1 k 2 n + k a n ( z n , z n ) = Z I n h φ t n t,h g , z n i n d t ≤ Z I n k φ t n t,h g k L 2 (Γ h ( t n )) d t k z n k n ≤ 1 2 k M Z I n k φ t n t,h g k n d t 2 + k M 2 k z n k 2 n . Summing up and using (6.7) gives us N X n =1 1 2 k z n +1 − z n k 2 n − M k 1 + 1 2 C L 2 (Γ h ) M k k z n k 2 n + k a n ( z n , z n ) ≤ 1 2 M k g k 2 h,k , 28 suc h that for 0 < k < min 2 C L 2 (Γ h ) M 2 , 1 2 C r k 2 N X n =1 k z n k 2 H 1 (Γ( t n )) ≤ k N X n =1 a ( t n ; z n , z n ) + r n ( z n , z n ) − 1 + C L 2 (Γ h ) M k 2 M k z n k 2 n ≤ 1 2 M k g k 2 h,k . (6.8) No w w e test (6.4) with z n − z n +1 to get k z n − z n +1 k 2 n + k 2 a n ( z n , z n ) + a n ( z n +1 − z n , z n +1 − z n ) − a n ( z n +1 , z n +1 ) = . . . = Z I n h φ t n t,h g , z n − z n +1 i n d t ≤ 1 2 Z I n k φ t n t,h g k 2 n d t 2 + 1 2 k z n − z n +1 k 2 n . Summing up and using Lemma 6.3 on a as w ell as the estimate (6.3) on r w e arriv e at k 2 a ( t m , z m , z m ) + 1 2 N X n = m k z n +1 − z n k 2 n ! ≤ 1 2 k k g k 2 h,k + k 2 N X n = m +1 a ( t n − 1 ; z n , z n ) − a ( t n ; z n , z n ) + r n − 1 ( z n , z n ) − r n ( z n , z n ) ≤ 1 2 k k g k 2 h,k + k 2 N X n = m +1 C k k z n k 2 H 1 (Γ( t n )) + k z n k 2 H 1 (Γ( t n − 1 )) . Com bine with (6.8) to arriv e at the lemma. The follo wing Lemma sho ws, that it is sufficient to estimate the appro ximation error at the p oin ts t n , 1 ≤ n ≤ N to pro v e con v ergence in L 2 L 2 (Γ h ) . Lemma 6.5. L et r ∈ H 1 ([0 , T ] , V ) , V a sep ar a ble Hilb ert sp ac e, then ther e holds for τ ∈ I n k r − r ( τ ) k L 2 ( I n ,V ) ≤ k k r 0 k L 2 ( I n ,V ) . In our situation this implies for r ∈ H 1 V h that 1. k k r ( τ ) − ¯ r n k 2 L 2 (Γ h ( τ )) ≤ C k 2 R I n k ˙ r k 2 L 2 (Γ h ( t )) d t , 2. and R I n k r ( t ) − ¯ r n k 2 L 2 (Γ h ( t )) d t ≤ C k 2 R I n k ˙ r k 2 L 2 (Γ h ( t )) d t . Pr o of. F or the fist assertion approximate r by r i ∈ D ([0 , T ] , V ) such that r i H 1 ([0 ,T ] ,V ) − → r as i → ∞ . Use k r i − r i ( τ ) k L 2 ( I n ,V ) = Z I n Z t τ r 0 i ( θ )d θ 2 V d t 1 2 ≤ Z I n k Z I n r 0 i ( θ ) 2 V d θ d t 1 2 ≤ k k r 0 i k L 2 ( I n ,V ) , 29 and the fact that r ∈ C ([0 , T ] , V ), compare [LM68, Thm. 3.1]. Hence the first part of the lemma follows by passing to the limit. In our situation this implies, since φ τ t,h r ( t ) ∈ H 1 ([0 , T ] , V h ( τ )) k ¯ r n − r ( τ ) k 2 L 2 (Γ h ( τ )) = 1 k Z I n φ τ t,h r ( t ) − r ( τ ) d t 2 L 2 (Γ h ( τ )) ≤ 1 k Z I n φ τ t,h r ( t ) − r ( τ ) 2 L 2 (Γ h ( τ )) d t ≤ k Z I n k φ τ t,h r ( t ) 0 k 2 L 2 (Γ h ( τ )) d t ≤ k C h J Z I n k ˙ r k 2 L 2 (Γ h ( t )) d t . This prov es 1. , in order to get 2. in tegrate o v er I n . W e are no w prepared to prov e the main result of this section. Theorem 6.6. L et f ∈ L 2 L 2 (Γ) , and let y h and y h,k solve (5.8) and (6.2) , r esp e ctively, with y h 0 ∈ L 2 (Γ h 0 ) and f h = f l . Ther e exists a c onstant C > 0 indep endent of h, k > 0 and of f and y h 0 such that k y h − y h,k k L 2 L 2 (Γ h ) ≤ C k k ˙ y h k L 2 L 2 (Γ h ) + k f k L 2 L 2 (Γ) + k y h 0 k L 2 (Γ h 0 ) . Pr o of. The pro of is inspired b y [SD05, Thm. 5.2], compare also [Vie07, Thm 1.2.5] and [MV08a, Thm 5.1]. T est (5.8) with φ t t n ,h ϕ , ϕ ∈ V h and integrate ov er I n to obtain h y h ( t n ) , ϕ i n − h y h ( t n − 1 ) , ϕ i n − 1 + Z [0 ,T ] a ( t ; y h , ϕ ) d t = Z [0 ,T ] h f l , ϕ i L 2 (Γ h ( t )) d t . (6.9) Solv e the adjoint equation (6.4) for z with b oth righ t-hand side and test function ϕ = g = P N n =1 ( ¯ y n h − y n h,k ) 1 I n Z I n k ¯ y n h − y n h,k k 2 n d t = h z n − z n +1 , ¯ y n h − y n h,k i n + k a n ( ¯ y n h − y n h,k , z n ) (6.10) Subtract (6.9) from (6.2). T ested with z this yields h y n h,k − y h ( t n ) , z n i n − h y n − 1 h,k − y h ( t n − 1 ) , z n i n − 1 + k a n ( y n h,k − ¯ y n h , z n ) = . . . = Z I n a ( t ; y h , z n ) d t − k a n ( ¯ y n h , z n ) + k h ¯ f n l , z n i n − Z I n h f l , z n i L 2 (Γ h ( t )) d t 30 Let ¯ y h = P N n =1 ¯ y n h 1 I n . Add (6.10) and sum up ov er 1 ≤ n ≤ N to get h f l , z i h,k − h f l , z i L 2 L 2 (Γ h ) + N X n =1 Z I n k ¯ y h − y h,k k 2 n d t + Z I n a ( t ; y h , z n ) d t − k a ( t n ; ¯ y n h , z n ) = . . . = N X n =1 h k r n ( ¯ y n h , z n ) + h ¯ y n h − y h ( t n ) , z n i n − h y n − 1 h,k − y h ( t n − 1 ) , z n i n − 1 − h z n +1 , ¯ y n h − y n h,k i n i = h y N h,k − y h ( t N ) , z N +1 i N − h y 0 h,k − y h ( t 0 ) , z 1 i 0 + N X n =1 k r n ( ¯ y n h , z n ) + h ¯ y n h − y h ( t n ) , z n − z n +1 i n = N X n =1 k r n ( ¯ y n h , z n ) + h ¯ y n h − y h ( t n ) , z n − z n +1 i n , and finally , bringing to b ear everything w e ha ve, i.e. the estimates from Lemma 6.3 for a , from Lemma 6.2 for the L 2 -norms, and the b ound on r from (6.3), w e arriv e at N X n =1 Z I n k ¯ y h − y h,k k 2 n d t ≤ k N X n =1 k ¯ y n h − y h ( t n ) k 2 n ! 1 2 1 k N X n =1 k z n − z n +1 k 2 n ! 1 2 + . . . + C k N X n =1 Z I n k φ t n t,h y h k H 1 (Γ h ( t n )) d t 2 1 2 k N X n =1 k z n k 2 H 1 (Γ h ( t n )) ! 1 2 + C k k f k L 2 L 2 (Γ) k z l k L 2 L 2 (Γ) | {z } ≤ C k z k h,k . Hence using Lemma 6.4 on z we can divide by k ¯ y h − y h,k k h,k . The Lemmas 6.2 and 6.3 allow us to estimate the in volv ed norms, and b ecause of the stability of the space discretization, compare Lemma 5.8, we can estimate the H 1 (Γ h ( t ))-term, to finally arrive at k ¯ y h − y h,k k L 2 L 2 (Γ h ) ≤ C k N X n =1 k ¯ y n h − y h ( t n ) k 2 n ! 1 2 + k k f k L 2 L 2 (Γ) + k k y h 0 k L 2 (Γ h 0 ) . (6.11) W e now apply Lemma 6.5[ 2. ] to the error e k = y h,k − y h and the av eraged error ¯ e k = y h,k − ¯ y h and sum up to obtain k e k − ¯ e k k L 2 L 2 (Γ h ) ≤ C k k ˙ y h k L 2 L 2 (Γ h ) . Com bine with (6.11) and 6.5[ 1. ] to estimate k e k k L 2 L 2 (Γ h ) ≤ C k k ˙ y h k L 2 L 2 (Γ h ) + k ¯ e k k L 2 L 2 (Γ h ) ≤ C k k ˙ y h k L 2 L 2 (Γ h ) + k f k L 2 L 2 (Γ) + k y h 0 k L 2 (Γ h 0 ) . With view of the stability assertions from (3.10) and Lemma 5.8 and together with Theorem 5.11 we get the follo wing Corollary . Corollary 6.7. In the situation of The or em 6.6 let in addition λ = µ l and y 0 ∈ H 2 (Γ 0 ) , and cho ose y h 0 as the pie c ewise line ar interp olation of ( y 0 ) l . Ther e exists a c onstant C > 0 indep endent of h, k > 0 and of f and y 0 such that k y l h,k − y k L 2 L 2 (Γ) ≤ C ( h 2 + k ) k y 0 k H 2 (Γ 0 ) + k f k L 2 L 2 (Γ) . 31 As addressed in Remark 5.12, it should b e p ossible to relax the condition on y 0 in to y 0 ∈ H 1 (Γ 0 ) using the L 2 (Γ 0 )-pro jection or the L 2 (Γ h 0 )-pro jection P h 0 . But even in the case of lo w regularity we still get a uniform estimate. Corollary 6.8. In the situation of The or em 6.6 let only y 0 ∈ L 2 (Γ 0 ) hold while f ≡ 0 . L et further y h 0 = P h 0 (( y 0 ) l ) . Ther e exists a c onstant C > 0 indep endent of h, k > 0 and of y 0 such that k y l h,k − y k L 2 L 2 (Γ) ≤ C h + sup t ∈ [0 ,T ] k λ l − µ k L ∞ (Γ( t )) + k h ! k y 0 k L 2 (Γ 0 ) . Pr o of. Regarding Theorem 5.13 and 6.6 it remains to b ound k ˙ y h k L 2 L 2 (Γ h ) . Like in the pro of of Theorem 5.13, using Lemma 5.8 and an in verse estimate, we arrive at the desired estimate. In particular, for κ > 0, choose k = κh 2 and λ such that sup t ∈ [0 ,T ] k λ l − µ k L ∞ (Γ( t )) ≤ C h to get an O ( h )-conv ergent sc heme. Remark 6.9. Note that our freedom in the choice of r now allows us to finally drop the conditions on λ and µ , resp ectiv ely , in (5.7), (5.8), and (6.1). Let us assume we w ant to appro ximate the solution y of (5.7) with µ ≡ 0, y 0 ∈ H 1 (Γ(0)), and f ∈ L 2 L 2 (Γ) . Now y h,k ∈ W h k solv es y 0 h,k = y h 0 , ∀ ϕ ∈ W h k , 1 ≤ n ≤ N : h y n h,k ,ϕ i n − h y n − 1 h,k , ϕ i n − 1 + k Z Γ h ( t n ) ∇ Γ h ( t n ) y n h,k · ∇ Γ h ( t n ) ϕ dΓ h ( t n ) = k h ¯ f n h , ϕ i n , iff y h,m,λ = P N n =1 e − λt n y n h,k 1 I n ∈ W h k , λ > 0 solves y 0 h,k,λ = y h 0 , ∀ ϕ ∈ W h k , 1 ≤ n ≤ N : h y n h,kλ , ϕ i n − h y n − 1 h,k,λ ,ϕ i n − 1 + k Z Γ h ( t n ) ∇ Γ h ( t n ) y n h,k · ∇ Γ h ( t n ) ϕ + λy n h,kλ ϕ dΓ h ( t n ) + k r n ( y n , ϕ ) = k h e − λt n − 1 ¯ f n h , ϕ i n , with k r n ( ψ , ϕ ) = ( e λk − 1 − λk ) h ψ , ϕ i n + k ( e λk − 1) Z Γ h ( t n ) ∇ Γ h ( t n ) ψ · ∇ Γ h ( t n ) ϕ dΓ h ( t n ) . T aking in to accoun t that k e − λt f ( t ) − P N n =1 e − λt n 1 I n f ( t ) k L 2 L 2 (Γ) ≤ k k f k L 2 L 2 (Γ) , w e apply Corol- lary 6.7 to y h,m,λ and conclude k y l h,k − y k L 2 L 2 (Γ) ≤ C e λT ( h 2 + k ). 7 V ariational Discretization W e now return to problem ( P d ) which has the adv an tage ov er ( P T ), that its adjoin t equation satisfies the regularity estimate (3.10). F or ( P T ) this is not the case iff y T ∈ L 2 (Γ( T )) \ 32 H 1 (Γ( T )). In the spirit of [Hin05], let us approximate ( P d ) by ( P h d ) min u ∈ L 2 L 2 (Γ h ) J ( u ) := 1 2 k S h d ( u ) − ( y d ) l k 2 h,k + α 2 k u k h,k s.t. a ≤ u ≤ b , with { Γ h ( t ) } t ∈ [0 ,T ] as in Section 5 and S h d : ( L 2 L 2 (Γ h ) , h· , ·i h,k ) → ( L 2 L 2 (Γ h ) , h· , ·i h,k ), f h 7→ y f is defined through the sc heme 6.2 with λ ≡ 0 and y h 0 ≡ 0. W e choose the scalar pro duct h· , ·i h,k defined in (6.5) in order to obtain a computable sc heme to ev aluate S h d ∗ , namely (6.4) with z N +1 = 0. Given snapshots { Γ h ( t n ) } N n =1 , the pro duct h· , ·i h,k can be ev aluated exactly for functions ϕ h ∈ W h k as well as for P [ a,b ] ( ϕ h ). Let U h ad = n v ∈ L 2 L 2 (Γ h ) | a ≤ v ≤ b o . As in (4.2) the first order necessary optimalit y condi- tion for an optimum u h of ( P h d ) is h αu h + S h d ∗ ( S h d u h − ( y d ) l ) , v − u h i h,k ≥ 0 , ∀ v ∈ U ad . (7.1) First note that as in the contin uous case the h· , ·i h,k -orthogonal pro jection onto U h ad coincides with the point-wise pro jection P [ a,b ] ( v ). Similar to 4.6 we get u h = P [ a,b ] − 1 α p h d ( u ) , p h d ( u ) = S h d ∗ S h d u − ( y d ) l . (7.2) Equation (7.2) is amenable to a semi-smo oth Newton metho d that, while still b eing im- plemen table, op erates entirely in L 2 L 2 (Γ h ) . The implementation requires one to resolve the b oundary betw een the inactive set I u ( t n ) = γ ∈ Γ( t n ) a < − 1 α p h d ( u )[ γ ] < b and the ac- tiv e set A u ( t n ) = Γ h ( t n ) \ I u ( t n ) for 1 ≤ n ≤ N . F or details on the implementation see [HV10] and [HV11]. Note that in order to implement S h d and S h d ∗ according to (6.2) and (6.4) for right-hand sides in W h k , again one only needs to know the snapshots { Γ h ( t n ) } N n =0 . The solution of ( P h d ) conv erges tow ards that of ( P d ) and the order of conv ergence is optimal in the sense that it is giv en b y the order of con v ergence of S h d and S h d ∗ . Theorem 7.1 (Order of Con v ergence for ( P h d )) . L et u ∈ L 2 L 2 (Γ) , u h ∈ L 2 L 2 (Γ h ) b e the solutions of ( P d ) and ( P h d ) , r esp e ctively. L et C > 1 . Then for sufficiently smal l h, k > 0 ther e holds 2 α u l h − u 2 L 2 L 2 (Γ) + y l h − y 2 L 2 L 2 (Γ) ≤ C 2 ( · ) l S h d ∗ ( · ) l − S ∗ d ( y − y d ) , u − u l h L 2 L 2 (Γ) . . . + ( · ) l S h d ( · ) l − S d u 2 L 2 L 2 (Γ) , with y = S d u and y h = S h d u h . Pr o of. The proof is a mo dification of the one from [HPUU09, Thm. 3.4], compare also [HV10]. Let P U h ad ( · ) denote the h· , ·i h,k -orthogonal pro jection onto U h ad . W e ha ve u l = P [ a,b ] − 1 α p d ( u ) l = P [ a,b ] − 1 α p d ( u ) l = P U h ad − 1 α p d ( u ) l . 33 Since u h ∈ U h ad , from the characterization of P U h ad ( · ) it follo ws h− 1 α p d ( u ) l − u l , u h − u l i h,k ≤ 0 . On the other hand w e can plug u l in to (7.1) and get h αu h + p h d ( u h ) , u l − u h i h,k ≥ 0 . Adding these inequalities yields α k u l − u h k 2 h,k ≤ p h d ( u h ) − p d ( u ) l , u l − u h h,k = h p h d ( u h ) − S h d ∗ ( y − y d ) l , u l − u h i h,k + h S h d ∗ ( y − y d ) l − p d ( u ) l , u l − u h i h,k . The first addend is estimated via h p h d ( u h ) − ( S h d ) ∗ ( y − y d ) l , u l − u h i h,k = h y h − y l , S h d u l − y h i h,k = −k y h − y l k 2 h,k + h y h − y l , S h d u l − y l i h,k ≤ − 1 2 k y h − y l k 2 h,k + 1 2 k S h d u l − y l k 2 h,k . This yields 2 α k u l − u h k 2 h,k + k y h − y l k 2 h,k ≤ 2 h ( S h d ∗ ( · ) l − ( · ) l S ∗ d )( y − z ) , u l − u h i h,k + k S h d u l − y l k 2 h,k . The claim follo ws for sufficiently small h, k > 0, using the equiv alence of the inv olved norms stated in Lemma 6.2. F or the problem ( P h T ) min u ∈ L 2 L 2 (Γ h ) J ( u ) := 1 2 k S h T ( u ) − ( y T ) l k 2 L 2 (Γ h ( T )) + α 2 k u k L 2 L 2 (Γ h ) s.t. a ≤ u ≤ b , one can prov e a similar result. Here the op erator S h T is the map f h → y f ( T ), according to the scheme (6.2) with λ ≡ 0. Theorem 7.2 (Order of Conv ergence for ( P h T )) . L et u ∈ L 2 L 2 (Γ) , u h ∈ L 2 L 2 (Γ h ) b e the solutions of ( P T ) and ( P h T ) , r esp e ctively. L et C > 1 . Then for sufficiently smal l h, k > 0 ther e holds 2 α u l h − u 2 L 2 L 2 (Γ) + y l h − y 2 L 2 (Γ( T )) ≤ C 2 ( · ) l S h T ∗ ( · ) l − S ∗ T ( y − y T ) , u − u l h L 2 L 2 (Γ) . . . + ( · ) l S h T ( · ) l − S T u 2 L 2 (Γ( T )) , with y = S T u and y h = S h T u h . 34 No w as to the con vergence of ( · ) l S h d ∗ ( · ) l − S ∗ d , note that taking the adjoint do es not com- m ute with the discretization. Indeed, apply the scheme (6.2) to the adjoint equation (4.3), i.e. λ = − ( div Γ( t n ) V ) l to get z N +1 g = 0 , ∀ ϕ ∈ W h k , 1 ≤ n ≤ N : Z I n h φ t n t,h g h , ϕ i n d t = h z n g , ϕ i n − h z n +1 g , ϕ i n + . . . k Z Γ h ( t n ) ∇ Γ h ( t n ) ϕ ∇ Γ h ( t n ) z n g − ( div Γ( t n ) V ) l ϕz n dΓ h ( t n ) + Z I n h ϕ div Γ h ( t ) V h , z n i L 2 (Γ h ( t )) d t , instead of (6.4). In the situation of ( P h d ) how ev er, this discrepancy can b e remedied by Lemma 5.6 which implies k ( · ) l − ( · ) l ∗ k L ( L 2 L 2 (Γ) ,L 2 L 2 (Γ h ) ) , k ( · ) l − ( · ) l ∗ k L ( L 2 L 2 (Γ h ) ,L 2 L 2 (Γ) ) ≤ C h 2 , and due to Lemma 6.2 whic h allo ws us to conclude k ( · ) l − ( · ) l ∗ k L ( L 2 L 2 (Γ) , ( L 2 L 2 (Γ h ) , h· , ·i h,k )) , k ( · ) l − ( · ) l ∗ k L ( L 2 L 2 (Γ h ) , ( L 2 L 2 (Γ h ) , h· , ·i h,k )) ≤ C ( h 2 + k ) , (7.3) if we interpret ( · ) l , ( · ) l as op erators into or on ( L 2 L 2 (Γ h ) , h· , ·i h,k ), resp ectiv ely . Hence we get the estimate ( · ) l S h d ∗ ( · ) l − S ∗ d ≤ (( · ) l − ( · ) l ∗ ) S h d ∗ ( · ) l + ( · ) l ∗ S h d ∗ (( · ) l − ( · ) l ∗ ) + ( · ) l ∗ S h d ∗ ( · ) l ∗ − S ∗ d ≤ C ( k + h 2 ) , in the L ( L 2 L 2 (Γ) , L 2 L 2 (Γ) )-op erator norm. No w as to ( P T ), all the results from section 5 and 6 remain v alid under the time transform t 0 = T − t . As opp osed to problem ( P h d ), here it is easier to pro of the con v ergence of S h ∗ T than that of S h T itself. In order to discretize S T ∗ w e choose λ = − div Γ h ( t ) V h to appro ximate µ l = − ( div Γ( t ) V ) l and r n ( ψ , ϕ ) = Z I n h ϕ div Γ h ( t ) V h , z n i L 2 (Γ h ( t )) d t − k h ϕ div Γ h ( t n ) V h , z n i L 2 (Γ h ( t n )) , and apply Theorem 6.8 to end up with k ( · ) l S h T ∗ ( · ) l − S ∗ T k L ( L 2 (Γ( T )) ,L 2 L 2 (Γ) ) ≤ C ( h + k h ), where S h T ∗ : z T 7→ z ∈ W h k ⊂ ( L 2 L 2 (Γ h ) , h· , ·i h,k ) according to z N +1 = z T , ∀ ϕ ∈ W h k , 1 ≤ n ≤ N : h z n , ϕ i n − h z n +1 , ϕ i n + k Z Γ h ( t n ) ∇ Γ h ( t n ) z n · ∇ Γ h ( t n ) ϕ dΓ h ( t n ) = 0 . No w in addition to (7.3) we ha ve k ( · ) l − ( · ) l ∗ k L ( L 2 (Γ( T )) ,L 2 (Γ h ( T ))) ≤ C h 2 , 35 ï 1 0 1 ï 1 0 1 ï 1 0 1 y time=0.22 x z ï 1 0 1 ï 1 0 1 ï 1 0 1 y time=0.44 x z ï 1 0 1 ï 1 0 1 ï 1 0 1 y time=0.66 x z ï 1 0 1 ï 1 0 1 ï 1 0 1 y time=1 x z ï 0.5 0 0.5 Figure 1: Selected time snapshots of ¯ u h computed for Example 8.1 on the Sphere after 4 refinemen ts. due to the inclusion (5.5). W e conclude ( · ) l S h T ( · ) l − S T L ( L 2 L 2 (Γ) ,L 2 (Γ( T ))) ≤ C ( h + k h ) , the op erator S h T = S h T ∗∗ : ( L 2 L 2 (Γ h ) , h· , ·i h,k ) → L 2 (Γ h ( T ))), f h 7→ y ( T ) b eing defined by the sc heme y 0 ≡ 0 , ∀ ϕ ∈ W h k , 1 ≤ n ≤ N : h y n , ϕ i n − h y n − 1 , ϕ i n − 1 + k Z Γ h ( t n ) ∇ Γ h ( t n ) y n · ∇ Γ h ( t n ) ϕ dΓ h ( t n ) = k h ¯ f n h , ϕ i n , as shows summation ov er n . If y T is more regular, such as y T ∈ H 1 (Γ( T )), then one might w ant to apply results from [DE11] that state h 2 -con vergence of the discretization S h T , yet not in the L ( L 2 L 2 (Γ) , L 2 (Γ( T )))-norm. In order to to so, it remains to ensure the regularity assumptions of [DE11, Thm. 4.4] to b e met b y the optimal control u . 8 Example Pro vided the results from [HIK03] and [Ulb03] hold on surfaces, Equation (7.2) is sem i-smooth due to the smoothing prop erties of S h ∗ d , i.e. the stabilit y ensured by Lemma 6.4. The lemma a priori holds only in the case λ ≥ 1, but can b e extended for arbitrary λ, µ by rescaling, see Remark 6.9. By Lemma 6.4 the op erator φ s · ,h S h d ∗ con tinuously maps ( L 2 L 2 (Γ h ) , h· , ·i h,k ) into L ∞ ([0 , T ] , H 1 (Γ h ( s ))) ⊂ L p ([0 , T ] , L p (Γ h ( s ))) ' L p ([0 , T ] × Γ h ( s )) for every 2 < p < ∞ . This w ould imply semi-smo othness of the op erator P [ a,b ] − 1 α φ s t,h p h d φ t s,h ( · ) : L 2 ([0 , T ] × Γ h ( s )) → L 2 ([0 , T ] × Γ h ( s )) , compare [Ulb03], and thus of equation (7.2). W e implemented a semi-smo oth Newton Algorithm for (7.2), along the lines of [HV11]. Example 8.1 (High Regularity) . Consider problem ( P d ) with α = 1, a = − 1 2 , b = 1 2 , T = 1, and Γ 0 ⊂ R 3 the unit sphere. Let Γ( t ) = ¯ Φ t 0 Γ 0 with ¯ Φ t 0 ( x, y , z ) = ( x, y , z /ρ 2 ( t )) T and 36 R E R R L 2 E O C L 2 E R R ∞ E O C ∞ R E R R L 2 E O C L 2 E R R ∞ E O C ∞ 0 1.68e-01 - 8.71e-01 - 5 6.78e-03 2.15 1.08e-01 2.01 1 5.40e-02 - 7.88e-01 - 6 3.15e-03 2.09 5.01e-02 1.97 2 4.13e-02 2.45 5.32e-01 0.86 7 1.72e-03 2.03 2.80e-02 1.99 3 2.60e-02 1.78 3.78e-01 1.79 8 7.92e-04 2.02 1.31e-02 1.97 4 1.24e-02 2.21 1.82e-01 1.97 T able 1: L 2 -error, L ∞ -error and the corresp onding EOCs for Example 8.1. ρ ( t ) = e sin(2 πt ) 2 . In co ordinates ( x, y , z ) of R 3 let ¯ u = P [ − 1 2 , 1 2 ] ( z sin(2 π t )) and y d = ˜ y d + S d ¯ u with ˜ y d = − α π 2 sin(2 π t ) − 2 π cos(2 π t ) + sin(2 π t ) ρ ( t ) x 2 + y 2 + ρ 2 z 2 ρ ( t ) + 1 − z 2 ρ 3 ( t ) − ρ 2 ( t ) x 2 + y 2 + ρ 2 z 2 z . Then ¯ u solves ( P d ). In order to compute the solution ¯ u h of ( P h d ) w e construct triangulations of Γ 0 from our macro- triangularion R 0 , i.e. the cub e whose no des reside on Γ 0 triangulated into 12 rec tangular triangles. W e generate R i +1 from R i through longest edge refinement follo wed b y pro jecting the inserted v ertices onto Γ 0 . T able 1 sho ws the relativ e error in the L 2 L 2 (Γ h ) -norm and the relative L ∞ -error E R R ∞ = k φ s t,h ( ¯ u h − ¯ u l ) k L ∞ ([0 ,T ] × Γ h ( s )) k φ s t,h ¯ u l k L ∞ ([0 ,T ] × Γ h ( s )) , as well as the corresp onding exp erimen tal orders of conv ergence E O C i = ln E R R i E R R i − q ln ln H i H i − q − 1 , where H denotes the maximal edge length of Γ h 0 , see T able 2. Throughout this section w e c hose q = 2 for b oth E O C L 2 and E O C L ∞ , and the time step length is k = 1 20 H 2 . Figure 1 sho ws the solution of ( P h d ) at differen t p oints in time. Note that the white line marks the b order b et w een active and inactiv e sets. On the active parts, the optimal control assumes the v alue a or b , respectively . Let us conclude with an example for ( P h T ) with a desired state y T that just barely lies in L 2 (Γ( T )). In this situation we can only expect O ( h )-con vergence. W e consider the uncon- strained problem Example 8.2 (Low Regularit y) . Consider problem ( P T ) with α = 1, a = −∞ , b = ∞ , T = 1 and Γ( t ) as in Example 8.1. Let y T = 1 ( x + y ) 0 . 45 . Since w e do not kno w the exact solution of Example 8.2, we estimate the relativ e error b y E RR i L 2 ' k ¯ u l i − ¯ u i +2 k L 2 L 2 (Γ i +2 ) / k ¯ u i +2 k L 2 L 2 (Γ i +2 ) , where ¯ u i denotes the solution of ( P h T ) on the i th refinement { Γ i ( t ) } t ∈ [0 ,T ] of { Γ( t ) } t ∈ [0 ,T ] . The lift ( · ) l is tak en p erp endicular to the 37 R 0 1 2 3 4 5 6 7 E R R L 2 0.1984 0.0982 0.0771 0.0519 0.0369 0.0265 0.0193 0.0138 E O C L 2 - - 1.6460 1.5501 1.3521 1.0755 0.9928 0.9665 H 1.6330 1.1547 0.9194 0.7654 0.5333 0.4099 0.2769 0.2085 T able 2: L 2 -error and the corresp onding EOC for Example 8.2. H is the maximal edge length of Γ h 0 (b oth examples). smo oth surface Γ( t ). T able 2 sho ws the estimated L 2 -errors and corresp onding EOCs. W e computed the L 2 (Γ h ( T ))-pro jection P h T y T l analytically . Otherwise the error in tro duced b y the n umerical integration of the non-smo oth function y T w ould b e dominan t. It helps that all our triangulations resolve the plane { x + y = 0 } . Ac kno wledgement The author w ould like to thank Prof. Dziuk for the fruitful discussion during his stay in Ham burg in Nov em b er 2010, and for kindly pro viding the preprin ts [DE10] and [DE11]. References [CL55] Earl A. Co ddington and Norman Levinson. The ory of or dinary differ ential e qua- tions. New Y ork, T oronto, London: McGill-Hill Book Compan y , 1955. [CL91] P . G. Ciarlet and J. L. Lions, editors. Handb o ok of numeric al analysis. V olume II: Finite element metho ds (Part 1). Amsterdam etc.: North-Holland, 1991. [DE07] G. Dziuk and C.M. Elliott. Finite elements on evolving surfaces. IMA J. Numer. A nal. , 27(2):262–292, 2007. [DE10] G. Dziuk and C. M. Elliott. L2-estimates for the evolving surface finite elemen t metho d. submitted, 2010. [DE11] G. Dziuk and C. M. Elliott. F ully discrete ev olving surface finite element method. submitted, 2011. [DLM11] G. Dziuk, Ch. Lubich, and D. Mansour. Runge-kutta time discretization of parab olic differen tial equations on ev olving surfaces. accepted, 2011. [Dzi88] G. Dziuk. Finite elements for the Beltrami operator on arbitrary surfaces. Partial differen tial equations and calculus of v ariations, Lect. Notes Math. 1357, 142-155, 1988. [Ev a98] L. C. Ev ans. Partial differ ential e quations. Graduate Studies in Mathematics. 19. Pro vidence, RI: American Mathematical So ciet y (AMS), 1998. [HIK03] M. Hin term ¨ uller, K. Ito, and K. Kunisc h. The primal-dual activ e set strategy as a semismo oth Newton metho d. SIAM J. Optim. , 13(3):865–888, 2003. 38 [Hin05] M. Hinze. A v ariational discretization concept in con trol constrained optimization: The linear-quadratic case. Comput. Optim. Appl. , 30(1):45–61, 2005. [HPUU09] M. Hinze, R. Pinnau, M. Ulbrich, and S. Ulbrich. Optimization with PDE c onstr aints. Mathematical Mo delling: Theory and Applications 23. Dordrech t: Springer, 2009. [HV10] M. Hinze and M. Vierling. Optimal control of the laplace-b eltrami op erator on compact surfaces – concept and n umerical treatmen t. submitted, 2010. [HV11] M. Hinze and M. Vierling. A globalized semi-smo oth newton metho d for v aria- tional discretization of control constrained elliptic optimal control problems. In Constr aine d Optimization and Optimal Contr ol for Partial Differ ential Equations . Birkh¨ auser, 2011. [Lio71] J. L. Lions. Optimal c ontr ol of systems governe d by p artial differ ential e quations. T ranslated b y S.K. Mitter. (Die Grundlehren der mathematisc hen Wissenschaften. Band 170.) Berlin-Heidelberg-New Y ork: Springer-V erlag , 1971. [LM68] J. L. Lions and E. Magenes. Pr obl` emes aux limites non homo genes et applic ations. V ol. 1, 2. P aris: Dunod , 1968. [LSU68] O.A. Ladyzhensk a ya, V.A. Solonniko v, and N.N. Ural’tsev a. Line ar and quasi- line ar e quations of p ar ab olic typ e. T r anslate d fr om the Russian by S. Smith. T rans- lations of Mathematical Monographs. 23. Providence, RI: American Mathematical So ciet y (AMS), 1968. [MMV98] O. Martio, V.M. Miklyuk ov, and M. V uorinen. Morrey’s lemma on Riemannian manifolds. R ev. R oum. Math. Pur es Appl. , 43(1-2):183–210, 1998. [MV08a] D. Meidner and B. V exler. A priori error estimates for space-time finite elemen t discretization of parab olic optimal con trol problems. I: Problems without control constrain ts. SIAM J. Contr ol Optim. , 47(3):1150–1177, 2008. [MV08b] Dominik Meidner and Boris V exler. A priori error estimates for space-time finite elemen t discretization of parab olic optimal control problems. I I: Problems with con trol constrain ts. SIAM J. Contr ol Optim. , 47(3):1301–1329, 2008. [Sc h10] A. Sc humac her. Die W¨ armeleitungsgleic hung auf b ew egten Ob erfl¨ achen. Master’s thesis, Universit¨ at F reiburg, 2010. [SD05] R. K. Sinha and B. Dek a. Optimal error estimates for linear parab olic problems with discontin uous co efficients. SIAM J. Numer. A nal. , 43(2):733–749, 2005. [T r¨ o05] F. T r¨ oltzsch. Optimal c ontr ol of p artial differ ential e quations. The ory, pr o c e dur es, and applic ations. (Optimale Steuerung p artiel ler Differ entialgleichungen. The orie, V erfahr en und A nwendungen.) . Wiesbaden: Vieweg, 2005. [Ulb03] M. Ulbric h. Semismo oth Newton metho ds for op erator equations in function spaces. SIAM J. Optim. , 13(3):805–841, 2003. 39 [Vie07] M. Vierling. Ein semiglattes Newtonv erfahren f ¨ ur semidiskretisierte steuerungs- b esc hr¨ ankte Optimalsteuerungsprobleme. Master’s thesis, Universit¨ at Hamburg, 2007. 40
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment