Sensor Noise Rejection
An inaccessible control architecture caused an undesirable influence on a UAV. The encountered noise in the performance was modeled using stochastic methods and a corrective term was implemented on an external controller. Our findings suggest that th…
Authors: Rakshit Allamaraju, Ben Reish, Allan Axelrod
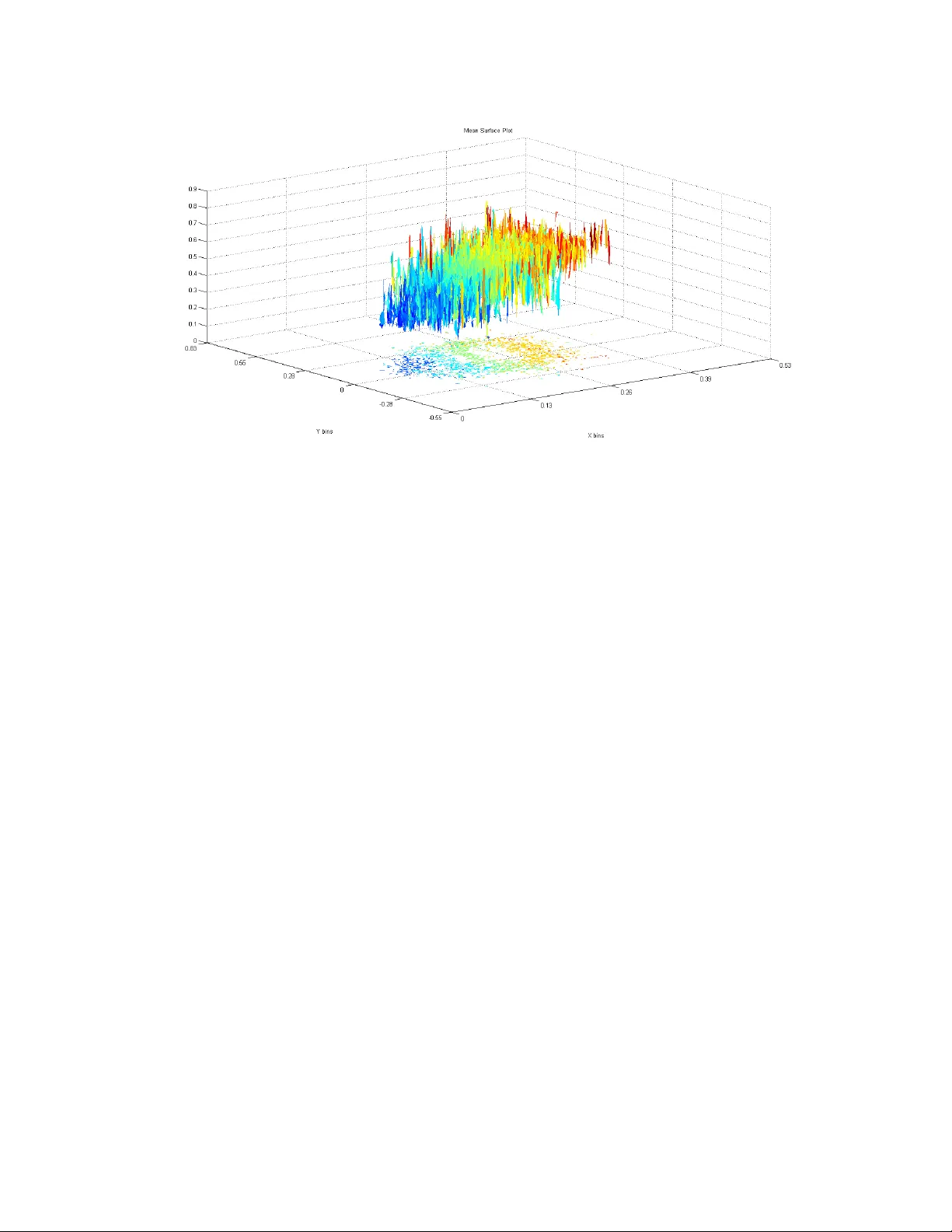
Sensor Noise Rejection Rakshit Allamra ju Ben Reish Allan Axelro d Abstract An inaccessible con trol arc hitecture caused an undesirable influence on a UA V. The encoun tered noise in the p erformance w as modeled using sto chastic methods and a corrective term was implemented on an external controller. Our findings suggest that the sonar noise probl em is unconv en tional may warran t the dev elopmen t of a new metho dology . Keyw ords: Subsumption Arc hitecture,Gaussian Mixture Mo dels,Gaussian Pro cess, Quadcopter, Random V ariable 1 In tro duction Industrial applications of con trolled solutions v ary widely in the lev el of do cumen tation made a v ailable to the end-users. In some instances, entire p ortions of the soft w are for a controlled solution are designed to b e inaccessible. This limits the usefulness of purc hased con trolled solutions to certain nic hes that ma y not adequately encompass the scop e of an engineering pro ject [8]. In suc h a case, pro jects ma y b e delay ed until an entirely new con trolled solution is purc hased, shipp ed, activ ated and reprogrammed. Ho w ev er, pro ject dela ys could result in unacceptable costs; e.g., in emergency resp onse scenarios, and delays in implementation could result in the unnecessary loss of h uman lives [6, 5]. Additionally , the increasingly aggressive nature of cyb er-attac ks has p osed a serious se- curit y and safet y concern . In fact, the p ow er, automation and c hemical industries ha v e already b een the targets of debilitating cyb er-attac ks [3, 4]. The cyb er-w arfare arms race has evolv ed in a costly and o v erly complicated manner, often inv olving efforts related to se- curing a netw ork of systems with man y accessible input sites. Such efforts t ypically in volv e a trade off betw een op erational efficiency and security . In resp onse to the aforementioned issues, w e presen t an augmented control arc hitec- ture that may similarly augmen t commercial-off-the-shelf (COTS) hardware and p oten tial cyb er-w arfare targets. The augmen ted architecture enlists an external sensory system to c haracterize temp orally anomalous or otherwise undesirable b eha vior to shap e the system input signal such that the undesirable asp ects of the system b ehavior are canceled out. In 1 the con text of COTS systems, this may allow for systems to op erate in more exotic envi- ronmen ts and fulfill a broader range of operational capabilities. F or cyb er-w arefare targets, this solution ma y allow systems to contin ue to exhibit desirable p erformance before, during and after a cyber-attack F or the sake of simplicity , w e exp erimen tally demonstrate the effectiveness of the aug- men ted control architecture in the con text of COTS systems. The demonstrated noise re- jection is notably differen t than what w e’v e seen in literature and this rep ort is an initial surv ey of our in vestigation. 2 Problem F orm ulation The ob jectiv e is to c haracterize and reduce the undesirable input (noise) introduced into the con trol input by a low er-lev el control lo op of the subsumption architecture [1] as the UA V ho v ers ab out a lo cation in 3-dimensional space. The UA V has an in ternal controller that uses a sonar apparatus to maintain a preset heigh t of 1 m . An Opti-T rack system is used as an external sensor to measure the UA V p osition during each fligh t testing episo de. The data from the Opti-T rac k system is received b y a Rob ot Op erating System (R OS) client, which con tains the higher-lev el con trol lo op of the subsumption architecture. The ROS client is used to affect the p osition and orientation of the UA V. Since the default UA V altitude is ab o v e the observ able range of the Opti-T rack, the ROS client altitude controller enforces an alternativ e steady state altitude of 0 . 5 m . The comp osite effect on the UA V altitude as it ho v ers ov er a uniformly level surface is sho wn in Figure 1a. The comp osite effect on the UA V altitude as it ho vers o v er a stepp ed surface is sho wn in Figure 1b. The degradation of the comp osite UA V altitude con trol in the presence of the stepp ed surface is significant and undesirable. The approac h w e hav e considered for fitting our data are describ ed below. 2.1 Gaussian Mixture Mo dels Gaussian mixture mo dels (GMM’s) are one of the most mature approac hes in mo deling densit y estimation of data. GMM’s are parametric probability distributions whic h are repre- sen ted as w eighted sums of Gaussian component densities. GMM’s are emplo yed for m ultiple purp oses suc h as color-based trac king and segmen tation, classifying color textures in image features [7], and speaker recognition [9]. A GMM can b e represented as p ( x | λ ) = M X i =1 w i g i ( x i | µ i , σ i ) (1) GMM’s add a great deal of flexibilit y for modeling data. If a sufficient n umbers of comp onen ts is allo wed, the data can b e easily mo deled with a high degree of accuracy . One of the main 2 200 400 600 800 1000 1200 −0.5 −0.4 −0.3 −0.2 −0.1 0 Time Z Error (a) ZError -No Building 200 400 600 800 1000 1200 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 Time Z Error (b) ZError -Building Figure 1: Zerror Comparison abilities of GMM’s is the capabilit y to form smo oth approximations to arbitrarily shap ed densities. It can b e considered as a amalgamation of a uni-mo dal Gaussian mo del and a v ector quan tizer thus enabling us to access characteristics of b oth. Thus the GMM not only pro vides a smo oth o v erall distribution fit whic h is a feature of uni-mo dal Gaussian, but also details the m ulti-mo dal nature of the densit y modeled b y V ector Quantizer. In our curren t analysis w e sough t to use Gaussian Mixture Mo dels to model the proba- bilit y distribution in altitude and thus relate it to the noise generated by the sonar system on the UA V. The presence of the sonar on the controller of the UA V induces a change in altitude whic h w e try to negate using a direct in version controller. The problem is particularly in teresting b ecause the b ehavior of the sonar signal is not directly observ able, due to the design of the UA V. Because of this effect we ha v e a determin- istic sonar sensor and we need to mo del it as a sto chastic system to determine its output. The noise in tro duced by the presence of a building from the built-in sonar on the UA V is tak en as a random v ariable. This is analogous to the automotive industry using a Gaussian random pro cess for characterization of road surfaces [2]. The automotiv e work character- ized the sho c k absorb er resp onse of simulated quarter-car models as a random v ariable [10]. Lik e the quarter-car mo del sho c k absorb ers, the UA V do es not hav e knowledge of up coming disturbances. 3 Exp erimen ts and Sim ulation In our current exp erimen tal setup we use an Opti-T rac k environmen t as an external p osition measuremen t sensor and place a UA V in the Opti-T rac k environmen t. The UA V flies in the exp erimen tal testb ed sho wn in Figure 2. The testb ed area is 16 f t × 12 f t and it is equipp ed with the Opti-T rac k motion capture system. The Opti-T rac k cameras ha v e a 3 Figure 2: T est Bed optical range b etw een 18 in to 433 in , thus allowing an estimated observ able v olume of 11 f t × 11 f t × 4 f t . The Opti-T rac k is a set of 10 infra-red cameras, whic h collect data based on the markers attached to the b o dy . The UA V used in this exp eriment is the a AR-Drone P arrot 2.0 Quadrotor (UA V), which is controlled b y a client program using the Rob ot Operating System (R OS) and our own external con trollers. The UA V is designed to receiv e velocity commands. The ROS client p ython script generates the v elo city commands and sends the commands to the UA V. The UA V has tw o sonar sensors on it’s base at a distance of 1 in , which are programmed to maintain the UA V at a default height of 1 meter. A single building is placed at a region close to the cen ter. This region is c hosen in order to main tain enduring visibilit y of the UA V from m ultiple cameras and prev ent the Opti-T rack from losing its p osition. The tra jectory of the UA V is designed so that it flies around till it reaches the building and hov ers o v er it until the end of the episo dic run. The data is recorded only for those interv als when the UA V is ho v ering o ver the building. A Prop ortional-Deriv ativ e (PD) controller written in Python is used as a closed lo op p osition controller whic h receiv es data from the Opti-T rac k and calculates the control com- mands required to maintain the correct p osition. In the current setup our desired p osition 4 −0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0 100 200 300 400 500 600 700 800 900 1000 X position X data total Edge Histogram Gaussian fit (a) Hist X −2 −1.5 −1 −0.5 0 0.5 1 1.5 0 100 200 300 400 500 600 700 800 900 1000 Y position Y data total Edge Histogram Gaussian fit (b) Hist Y 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0 0.002 0.004 0.006 0.008 0.01 0.012 Z Position Probability Histogram Gaussian Mixture Model (c) Hist Z Figure 3: Histogram distributions in altitude is 0 . 5 m . In our initial exp erimen ts we use our baseline PD con troller to fly the desired tra jectory without the correctiv e con trol. Each time the UA V ho v ers o v er the building the sonar detects the loss in altitude and sends a signal to the internal on-b oard con troller causing it to rise to a higher altitude. How ever, this effect pushes the UA V from the building, causing the sonar to mistak e the altitude to b e to o high and thus sending commands to the on-b oard con troller to decrease the altitude, leading to a rapid drop in altitude. W e record the p osition and attitude data and use it to form a distribution of the p osition along the Z direction. The distribution along all three directions are giv en in Figure 3 a,b,c. 4 Solution Our metho d is to c haracterize the noise of the sonar and then cancel it out by up dating the desired heigh t. This is an offline metho d at present, but could b e tak en to an online case. 5 Figure 4: Z Means in eac h Bin 4.1 Characterization W e use recorded data to gain an understanding of the noise. The UA V was initially instructed to hov er o v er a flat (no buildings) surface and the x, y , and z p osition of the craft w as recorded from the Opti-T rac k data. The UA V was then instructed to hov er o v er a disturbance (the edge of a building) and the x, y , and z p osition data was again recorded. The data w as trimmed to remo v e ob vious outliers as w ell as tak eoff and landing phenomena. The gathered z-data was placed in bins according to the corresp onding x and y p osition. Initially , a p olynomial fit of the histogram in Figure 4. was generated in MA TLAB as shown in Figure 5. The in ten t w as to use the p olynomial fit to generate a corrective con trol term to eliminate the effects of the sonar. The z-data was also used to train a Gaussian pro cess to locally estimate the exp ected altitude of the UA V and fit the data onto a surface. 4.2 Cancellation The estimates generated by the polynomial surface and the surface generated b y the Gaussian Pro cess were not sufficient to eliminate the sonar noise since the sonar instigated b oth steep and gradual c hanges in the altitude of the UA V; i.e., a single surface-estimate of the UA V altitude could not anticipate b oth sonar mo des. A heuristic controller solution w as also attempted. The heuristic con troller solution resulted in an insufficien t impro v emen t in p erformance; i.e., the sonar noise w as not negated. The flat terrain data was subtracted from the disturb ed data and that result w as used to form the corrective controller command. F or a given p osition in the x-y space, the desired height command w as shifted by the exp ected v alue of the noise from the sonar in the 6 0.4 0.6 0.8 1 1.2 −1.8 −1.6 −1.4 −1.2 −1 −0.8 −0.6 −0.4 −0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 X Predictive Mean Y Figure 5: Meansurface quadcopter’s controller. This allo w ed the sonar to add its noise while not adv ersely affecting the altitude of the craft. 5 Conclusions W e hav e used a subset of existing to ols at our disposal to mo del the sonar output in terms of the obtained p osition data. The random interaction of the sonar with the stepp ed surface caused conv en tional statistical mo deling tec hniques to generate in tractable estimations of the UA V altitude due to the sonar. Our results suggest that the problem of eliminating sonar noise is uncon ven tional, and that ma y w arrant the dev elopmen t of a new methodology . Since the b est result w as obtained through the heuristic tuning of certain parameters, it is p ossible that a reinforcemen t learning approac h migh t b e more robust. References [1] R. Bro oks, “A robust la y ered control system for a mobile rob ot.” [2] C. J. Do dds and J. D. Robson, “The description of road surface roughness,” Journal of Sound and Vibr ation , v ol. 31, no. 2, pp. 175–183, 1973. 7 [3] D. Kundur, X. F eng, S. Liu, T. Zourn tos, and K. L. Butler-Purry , “T ow ards a framew ork for cyber attac k impact analysis of the electric smart grid,” in IEEE Smart Grid Comm . IEEE, October 2010. [4] J. A. Lewis, “Assessing the risks of cyb er terrorism, cyb er w ar and other cyb er threats,” Center for Strategic and In ternational Studies, Study , 2002. [Online]. Av ailable: www.csis.org [5] R. R. Murphy , “Mobile rob ots in mine rescue and reco v ery ,” IEEE R ob otics and Au- tomation Magazine , v ol. 16, pp. 91–103, June 2009. [6] R. R. Murphy and S. Sto v er, “Rescue rob ots for m udslides: A descriptiv e study of the 2005 La Conchita m udslide resp onse,” Journal of Field R ob otics , v ol. 25, pp. 3–16, Jan 2008. [7] P erm uter, “A study of gaussian mixture models of color and texture features for image classification and segmen tation.” [8] S. S. R. R. Murph y , J. Kravitz, “Na vigational and mission usability in rescue robots,” Journal of the R ob otics So ciety of Jap an , vol. 28, pp. 142–146, Marc h 2010. [9] D. Reynolds, “Gaussian mixture mo dels,” MIT Lincoln Laboratory , T ech. Rep., 2009. [10] G. V erros, S. Natsiav as, and C. P apadimitriou, “Design optimization of quarter-car mo dels with passive and semi-activ e susp ensions under random road excitation,” Jour- nal of Vibr ation and Contr ol , v ol. 11, pp. 581–606, 2005. 8
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment