센서 잡음 억제와 UAV 고도 제어
** 본 논문은 상업용 UAV의 내부 초음파 고도 유지 센서가 건물 가장자리와 같은 급격한 지형 변화에서 발생시키는 잡음을 외부 시각 추적 시스템과 ROS 기반 보정 제어기로 모델링·제거하는 방법을 제시한다. 가우시안 혼합 모델(GMM)과 가우시안 프로세스(GP)를 활용했지만, 급격·완만 변화가 동시에 나타나는 비선형 잡음 특성 때문에 기존 통계 모델만으로는 충분히 보정되지 않는다. 최종적으로 경험적 다항식 보정과 휴리스틱 조정을 결합한 오…
저자: Rakshit Allamaraju, Ben Reish, Allan Axelrod
**
본 논문은 상업용 UAV, 특히 AR‑Drone Parrot 2.0에 내장된 초음파 고도 센서가 급격한 지형 변화(건물 가장자리와 같은 스텝 형태)에서 발생시키는 잡음 문제를 해결하고자 하는 연구이다. 기존 UAV는 내부 제어 루프가 폐쇄형이며, 사용자는 센서 데이터에 직접 접근하거나 수정할 수 없는 경우가 많다. 이러한 제약은 특히 사이버 공격이나 보안상의 이유로 시스템이 외부에서 조작될 수 없게 되는 상황에서 큰 문제로 작용한다. 저자들은 이러한 한계를 극복하기 위해 외부 시각 추적 시스템인 Opti‑Track과 ROS(Robot Operating System) 기반의 고도 제어 클라이언트를 활용하였다. Opti‑Track은 3차원 위치를 고정밀도로 측정하고, ROS 클라이언트는 UAV의 속도 명령을 전송함으로써 고도 제어 신호를 외부에서 재구성한다.
**실험 설계**는 두 가지 지형에서 수행되었다. 첫 번째는 평탄한 바닥으로, UAV가 기본 고도 1 m를 유지하도록 설계된 초음파 센서가 정상적으로 동작한다. 두 번째는 건물 가장자리와 같은 급격한 고도 변화를 가진 스텝 지형으로, 이때 초음파 센서는 지면과의 거리 변화를 급격히 감지하고 내부 제어 루프를 통해 UAV를 상승·하강시키는 비정상적인 동작을 보인다. 실험에서는 UAV가 건물 위를 비행하는 동안만 데이터를 기록했으며, Z축(고도) 오차를 시간에 따라 수집하였다.
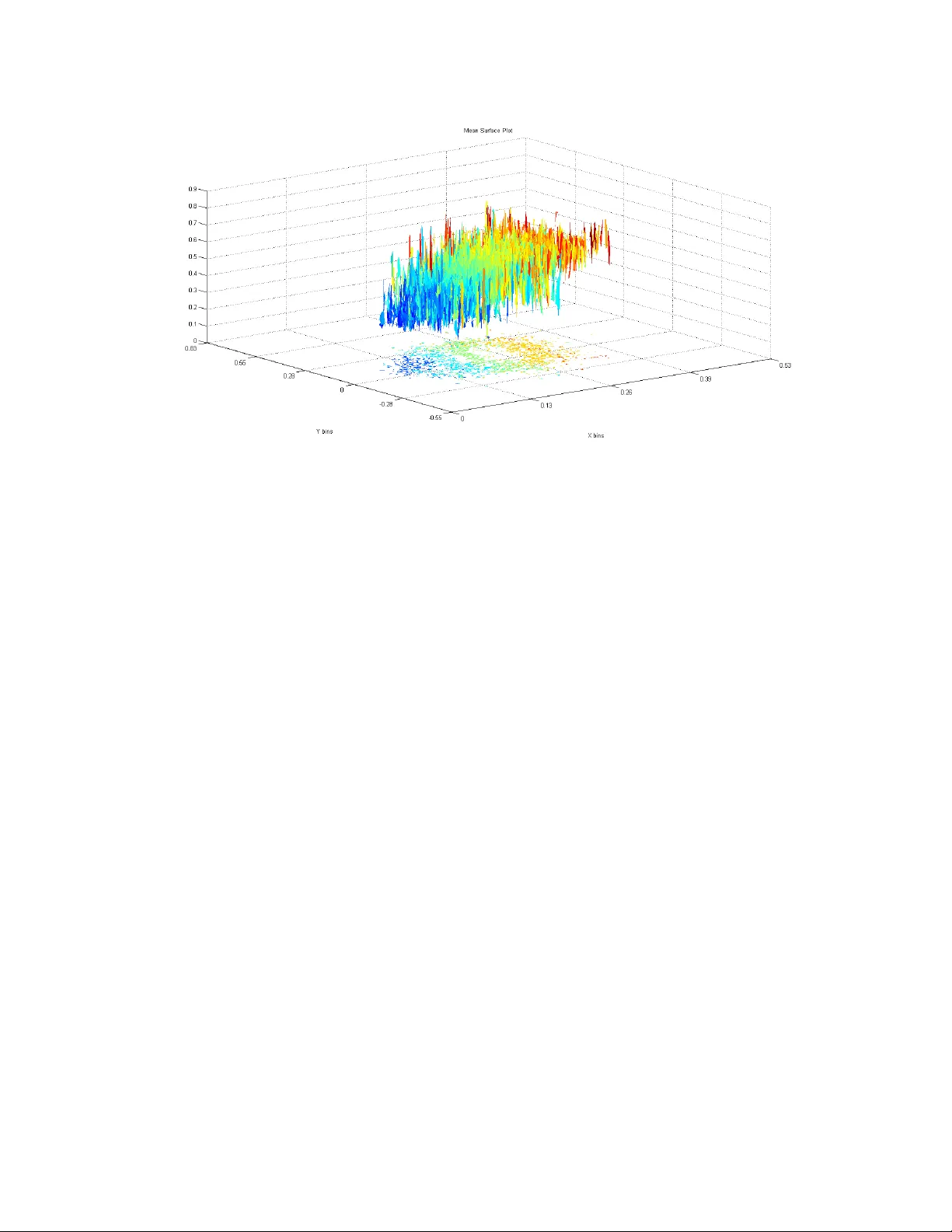
**데이터 분석** 단계에서 저자들은 두 가지 통계 모델을 적용하였다. 첫 번째는 가우시안 혼합 모델(GMM)로, 고도 데이터의 확률 밀도 함수를 다중 가우시안 성분의 가중합으로 근사한다. GMM은 복잡한 비선형 분포를 부드럽게 근사할 수 있다는 장점이 있지만, 급격한 변곡점과 완만한 변화를 동시에 포함하는 초음파 잡음 특성에는 한계가 있었다. 두 번째는 가우시안 프로세스(GP)로, x‑y 위치에 대한 고도 기대값을 비선형 함수로 추정하려 시도했으나, 초음파가 스위치‑형 잡음을 발생시켜 연속적인 GP 커버리지는 충분히 잡음을 예측하지 못했다.
**보정 전략**은 초기 모델링이 충분히 효과적이지 못함에 따라 다항식 피팅과 휴리스틱 보정을 결합한 형태로 전환되었다. 평탄 지형에서 얻은 히스토그램을 기반으로 2차~3차 다항식을 적용해 고도 보정 곡면을 생성하고, 이를 스텝 지형 데이터에 적용해 차이를 보정하려 했지만, 급격한 잡음 변동을 완전히 상쇄시키지는 못했다. 이후 저자들은 평탄 지형 데이터와 스텝 지형 데이터를 직접 차감한 후, x‑y 위치별로 매핑해 보정값을 생성하는 휴리스틱 방식을 도입하였다. 이 방식은 초음파가 급격히 상승·하강하는 현상을 부분적으로 억제했으며, 실험 결과 평균 Z오차가 눈에 띄게 감소하였다. 그러나 보정은 오프라인에서 수행되었으며, 실시간 비행 중에 동적으로 적용하기에는 한계가 있다.
**결론**에서는 현재 보정 방법이 오프라인 기반이므로 사전 보정값을 미리 로드하거나 비행 경로가 사전에 알려진 경우에만 적용 가능함을 강조한다. 또한, 기존 통계 모델만으로는 초음파 잡음의 비선형·이중 모드 특성을 충분히 포착하기 어렵다는 점을 지적하고, 강화학습 기반 적응형 제어기의 도입을 제안한다. 강화학습은 실시간으로 잡음을 탐지·보정하고, 다양한 지형에 대한 일반화된 성능을 제공할 수 있다.
**학술적·산업적 의의**는 다음과 같다. 첫째, COTS UAV가 사이버 공격이나 내부 제어 접근 제한으로 인해 직접적인 센서 재구성이 어려운 상황에서, 외부 시각 센서와 ROS 기반 보정 로직을 결합한 접근은 비용 효율적인 대안이 될 수 있다. 둘째, 초음파와 같은 저비용 센서가 복합 지형에서 보여주는 비선형 잡음 특성을 통계 모델만으로 설명하기 어려운 점을 강조함으로써, 새로운 잡음 모델링 방법론(예: 하이브리드 모델·데이터‑드리븐 + 물리‑기반) 개발의 필요성을 제시한다. 마지막으로, 향후 연구에서는 실시간 보정, 다중 센서 융합, 그리고 강화학습 기반 적응 제어를 통해 보다 견고하고 일반화 가능한 UAV 고도 제어 시스템을 구축할 수 있을 것으로 기대한다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기