A Student-t based filter for robust signal detection
The search for gravitational-wave signals in detector data is often hampered by the fact that many data analysis methods are based on the theory of stationary Gaussian noise, while actual measurement data frequently exhibit clear departures from thes…
Authors: Christian R"over
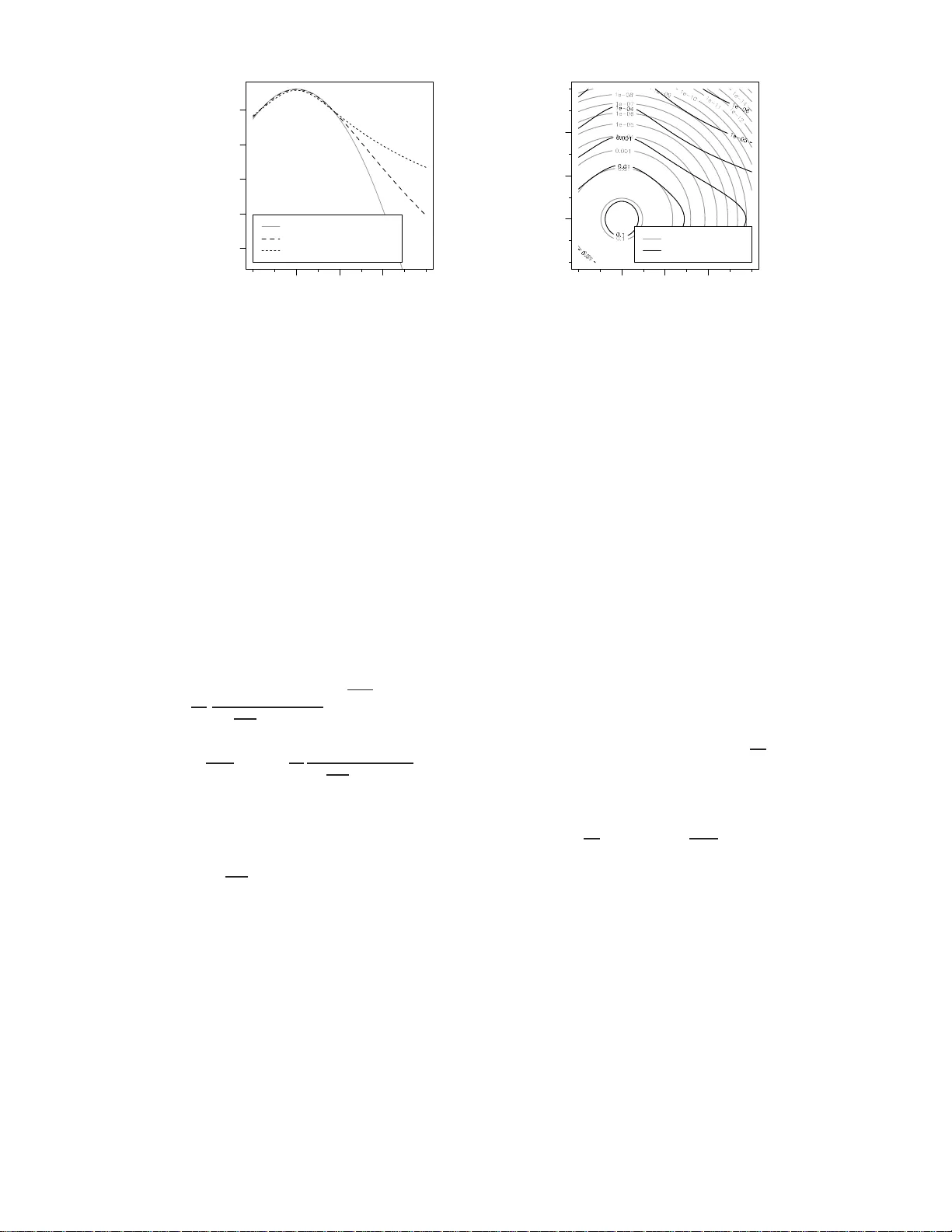
LIGO-P1100 103 AEI-2011-0 60 A Studen t-t based filter for robust signal detection Christian R¨ over ∗ Max-Planck-Institut f¨ ur Gr avitationsphysik (A lb ert-Einstein-Institut) and L eibniz Universit¨ at Hannover, 30167 Hannover, Germany The searc h for gra vitational-w a ve signals in detector data is o ften hamp ered by the fact that many data analysis method s are based on the t heory of stationary Gaussian noise, while actual measuremen t data frequently exhibit clea r departures from these assumptions. Deriving meth o ds from mod els more closely reflecting t h e data’s prop erties promises t o yield more sensitive procedu res. The commonly used matched filter is suc h a detection metho d that may b e derived via a Gaussi an mod el. In this pap er we propose a generalized matched-filtering technique based on a Stud en t- t distribution that is able to account for hea vier-tailed noise and is robu st against outliers in the data. On the technical side, it generalizes the matched filter’s least-squares metho d to an iterative, or adaptive, v ariation. In a simplified Monte Carlo study we sho w that when applied to sim ulated signals buried in actual interferometer noise it leads to a higher detection rate th an the usu al (“Gaussian”) matched filter. P A CS num bers: 02.50.-r, 04.80.Nn, 05.45.Tp, 95.75.Wx I. INTRO DUCTION Since the existence of gravitational radiation was es- tablished as a conseq uence from general relativity the- ory , a g r eat amount of effor t has gone into the dev el- opment of instruments and metho ds to detect gravita- tional w av e s directly [ 1 , 2 ]. Gravitational wa ves (GWs) are notor iously weak co mpa red to the so urces of noise in to da y’s gro und-based gravitational-wa v e detectors, a nd so it takes b o th extraordinarily sensitive instruments a s well as sophis ticated data analysis techniques to measure them. The o utput o f an in ter ferometric GW detector is essentially a time series of non white noise, and — p oten- tially — a s uperimp osed signal whose exact w av efo rm is determined b y several para meters. Data analysis a iming for GW detection hence req uires filtering of time-series data for r a re, weak signals that are o ften of a known, parametrized shap e. Many commonly used a pproaches are ba sed o n matched filtering the data. The matched filter ma y b e derived as a maximum-lik elihoo d (ML) de- tection metho d in the framework of a Gaussian no is e mo del, but more genera lly will actually be ML pro cedure for a wider cla ss of mo dels. While the metho d works re- mark ably w ell and is a ble to discriminate weak signa ls from the no ise, it commonly r uns in to problems due to non-Gaussian or no nstationary b ehavior of the actual in- strument nois e . F or exa mple, the matc hed filter often is sensitive to outliers or loud tra nsien t no ise event s in the data, whic h, although showing little similarity with the signal sought for, also do not look like plain noise either. A lot of effort needs to go into iden tifying such false alarms. W e prop o se a mor e robust pro cedure that is based on a Student- t distribution for the noise, a s in tro duced in Ref. [ 3 ]. Several mo tiv ations may be used for introducing ∗ c hristian.ro ev er@aei.mpg.de the Student- t mo del; most o bviously it exhibits “heav- ier tails” and non-spherica l probabilit y density contours, allowing one to accommo date outliers in the noise. Al- ternatively , the model may also b e s een as incorp orating imper fect prior kno wledge of t he noise spec tr um, either bec ause it is only estimated to limited a ccuracy , or b e- cause it is v ar ying over time. Mo dels of this kind a re commonly used for robust parameter estimation , but, as we will show in the following, the mo del a lso exhibits a b etter p erforma nce for detection purpose s when the assumption of stationary Gaussian noise is violated. W e exp ect the prop osed filtering metho d to b e useful in other signal-pro ces sing contexts as well. In Sec. II we w ill first derive the usual matc hed filter from a Gaussia n noise mo del. In Sec. I II we intro duce the Student- t model, ela bor ate on the motiv a tion for its use as w ell as p oint out the differe nces from the Gaussian mo del, and derive the analo gous filter ing procedur e. In Sec. IV w e r epor t on a case study using real detector data and simulated signals to s how that her e the Studen t- t based filter indeed yields a b etter detection rate. W e close with some concluding remarks. II. GAUSS IAN MA TCHED-FIL TERING A. General A match ed filter may b e derived in different ways, for example ba s ed on co nsiderations of the residual sum-o f- squares (or p ow er ) decompo sition, without reference to a more sp e cific no ise mo del [ 4 ]; ho wev e r , here we will con- centrate on a deriv ation via the a s sumption of s ta tion- ary Gauss ian noise and the Whittle likeliho o d. This will allow us to easily generalize the usual matched-filtering metho d to the case of Studen t- t distributed noise in the following. It is impo rtant tho ugh to keep in mind that the matched filter is not necessarily connected to the as- sumption of Gaussia n noise. When w e say “Ga ussian 2 matched filter ”, this is meant to refer to its deriv ation and in terpretation in the Gaussian con text. B. The G aussian noi s e mo del In order to implement the a ssumption of s ta tionary , Gaussian noise residua ls, the Whitt le likelihoo d approx- imation is commonly utilized [ 3 , 5 , 6 ]. In the Whittle approximation, signal and noise time series are treated in their F o ur ier-domain represen tation. The explicit as- sumption b eing made on the noise n ( t ) is that its dis- crete F our ie r tra nsform ˜ n ( f ) is independently Gaussian distributed with zero mean a nd v ar iance pro por tional to the power sp ectral densit y (PSD), V ar Re ˜ n ( f j ) = V ar Im ˜ n ( f j ) = N 4∆ t S 1 ( f j ) , (1) where f j is t he j th F ourier fre q uency , S 1 ( f j ) is the cor- resp onding one-sided p ow er spectral density , and j = 0 , . . . , N / 2 indexes the F our ier frequency bins. An ex- plicit definition of the F our ier transfo rm conv entions used here is given in the appendix . F or some measur ed data d ( t ) one then commonly as- sumes a para metrized signal s θ ( t ) with par a meter vec- tor θ a nd additive Gaussian nois e with a kno wn 1-side d power sp ectral densit y S 1 ( f ): d ( t ) = s θ ( t ) + n ( t ) ⇔ ˜ d ( f ) = ˜ s θ ( f ) + ˜ n ( f ) (2) (i.e., additivity holds in both time and F o urier domains). The corres ponding lik elihoo d function then is given by p d | θ ∝ exp − 1 2 X j | ˜ d ( f j ) − ˜ s θ ( f j ) | 2 N 4∆ t S 1 ( f j ) (3) [ 3 ]. C. Likeliho od maximization 1. ML dete ction a nd the pr ofile likeli ho o d If there w ere no unkno wn signal parameters to the signal mo del (like time-of-arriv al, amplitude, pha se,...), then, a ccording to the Neyman-Pearson lemma [ 7 ], the optimal detection statistic w ould b e the likelihoo d r atio betw een the “signal” and “no -signal” mo dels. Once there are unknowns in the signal mo del, a co mmon approach is to use a g eneralized Neyman-Pearson test statistic , that is, the maximized likelihoo d r atio, where maximization is carried o ut over the unknown par ameters [ 7 ]. While this is in general not an optimal detection statistic, this ad ho c approa c h is o ften efficient and effectiv e. Suc h a maximum likelihoo d (ML) detectio n appr oach is clo sely related to ML estimation, as either way the parameter v alues maximizing the likeliho o d w ill need to be der ived. In case of a Gauss ian noise mo del as in ( 3 ), ma ximization of the lik elihoo d is equiv alent to minimizing a weigh ted sum-of-squar es, i.e., a w eighted least-sq uares appro ach. It should be noted that in a Bay esian reaso ning frame- work, the detection problem w o uld b e approached via the ma r ginal likelihoo d r ather than the maximized lik e- liho od [ 8 , 9 ]. The marginal lik eliho o d is the exp ectation of the likelihoo d function with resp ect to the prior dis- tribution, and b oth marginal and ma ximized likeliho od may be equiv alent for a certain choice of the pr ior dis- tribution. O ne can show the margina l likelihoo d to b e optimal for any particular c hoice of pr io r distribution, while the maximized likelihoo d in ge neral is not (see e.g. [ 10 , 11 ]). Maximiza tio n o f the likeliho o d on the o ther hand is commonly m uc h ea sier co mputationally . As will b e seen in the f ollowing, it is often con v enien t to divide the parameter vector int o subsets, as it may be po ssible to a na lytically maximize the likelihoo d for fixed v alues of some parameters ov er the remaining pa- rameters. This maximized conditional likelihoo d as a function of a subse t o f par ameters is also called the pro- file lik elihoo d . If a profile likelihoo d is given, lik eliho od maximization may b e reduced to maximizing o v er the remaining lower-dimensional parameter subspa ce. As an example, consider a signal having three free para meters: amplitude, phase, and time of arriv al. If likeliho od max- imization ca n b e done analytically over a mplitude and phase for an y given arriv a l time, this results in a profile likelihoo d that is a function of time. The likelihoo d’s ov erall maximum then ma y b e computed via a n umerical brute-force sea rch of the pro file likelihoo d over the time parameter. 2. Why c ar e ab out li ne ar mo dels? In signal pro cessing in general, a nd in GW data ana l- ysis in particula r, the signals of interest are co mmonly parametrized (among other additional parameters) in terms of a n amplitude a nd a phase para meter. Consider for example a s imple sin usoidal signal of the form s A,φ,f ( t ) = A sin(2 π f t + φ ) (4) = β s sin(2 π f t ) + β c cos(2 π f t ) (5) which instead of amplitude A and phase φ ma y equiv- alently b e parametrized in ter ms of sine- and cosine- amplitudes β s and β c . Other examples of signal mo d- els given in terms of linear combinations are the singular v alue decomp osition appro ach used e.g. in [ 12 , 13 ] or the transformatio n of antennae pa tter n effects in to fo ur am- plitude parameters in the deriv ation of the F -statistic [ 14 ]. A linea r mo del formulation will turn out conv e- nient in the following, as a linea r (or conditionally linear) mo del will a llow us to p erform (co nditional) likelihoo d maximization analytically . 3 3. The gener al line ar mo del Consider a linear mo del for the data, i.e., y = X β + ǫ (6) where y is a N -dimensional da ta vector, X is a ( N × k )- matrix, β is a k -dimens io nal parameter v ector, and ǫ is an N -dimensional vector of er ror terms. The error s ǫ ar e assumed to b e Gaussian dis tributed with mean zero a nd some cov ar iance matrix Σ. In the ab ov e signa l-pro cessing co n text, y and ǫ are the N -dimensional vectors of r e-arrang ed real and imaginar y parts of F our ier-domain data ( ˜ d ) and noise ( ˜ n ), the sig- nal s θ is given b y a linear c o m bination of the co lumns of a matrix X acco r ding to the parameter vector β , and the no ise cov ar iance Σ is a diagona l matrix defined through ( 1 ). The Gaussian lik eliho od function is characterized b y p ( y | β ) ∝ − ( y − X β ) ′ Σ − 1 ( y − X β ) . (7) In the linear mo del, the likeliho o d may be maximized analytically , and the ML estimator for the unknown pa- rameter v ector β is giv en b y ˆ β = ( X ′ Σ − 1 X ) − 1 X ′ Σ − 1 y (8) [ 8 , 15 ]. In the mo dels o f concern here, estimation is simpli- fied b y the fact that the noise cov aria nce Σ is a diago nal matrix ( 1 ) so that its inv e rse again is dia gonal. In ad- dition, here w e add the common assumption that the vectors s pa nning the signal ma nifold, the columns of X , are orthogo nal. A non-orthog o nal basis X would co m- plicate the proc edure slightly; see e.g. [ 14 ]. Under these conditions, the pivotal q uan tities for ML estimation and detection are b j = X ′ · ,j Σ − 1 y = N X i =1 x i,j y i σ 2 i and (9) c j = X ′ · ,j Σ − 1 X · ,j = N X i =1 x 2 i,j σ 2 i , (10) i.e., the qua dratic forms, or inner pro ducts, in volving the j th basis vector ( j th column o f X ) with the data vector y , and with itself. The elements of t he parameter v ector’s ML estimate ˆ β are then given by ˆ β j = b j c j , (11) the maximized likeliho o d ratio vs. the no-sig nal model is given by log p ( y | ˆ β ) p ( y | ~ 0) = k X j =1 b 2 j 2 c j , (12) and the fitted v alues are given by ˆ y = X ˆ β = k X j =1 ˆ β j X · ,j = k X j =1 b j c j X · ,j . (13) 4. The dete ction stat istic and its distribution W e define the statistic H k = k X j =1 P N i =1 x i,j y i σ 2 i 2 P N i =1 x 2 i,j σ 2 i = 2 × log p ( y | ˆ β ) p ( y | ~ 0) (14) (see als o ( 12 )) which, under the null hypothes is of the data y being purely noise, is χ 2 distributed with k de- grees of fre e dom. Under the signal hypothesis, when a signal s β ⋆ = X β ⋆ is pres en t in the data, the cor resp ond- ing figure ev aluated at the true parameter v a lues β ⋆ , 2 × log p ( y | β ⋆ ) p ( y | ~ 0) , (15) will b e Gaussian distributed with mean 2 and v a riance 4 2 , where 2 = N X i =1 P k j =1 β ⋆ j x i,j 2 σ 2 i = N X i =1 ( X β ⋆ ) 2 i E ǫ 2 i (16) = ( X β ⋆ ) ′ Σ − 1 ( X β ⋆ ) (17) is the true signal’s signal- to-noise r atio (SNR) . Co nse- quently , for a signal of g iv en S NR 2 , the expected log- arithmic likelihoo d ratio ev aluated a t the true para me- ters is E h log p ( y | β ⋆ ) p ( y | ~ 0) i = 1 2 2 , while the likelihoo d ra - tio p ( y | β ⋆ ) p ( y | ~ 0) follows a lo g-normal distribution with median exp( 1 2 2 ) and exp ectation E h p ( y | β ⋆ ) p ( y | ~ 0) i = exp( 2 ). The maximized likelihoo d ratio will be larg er than that; the statistic H k follows a noncentral χ 2 k ( 2 )-distribution with noncentralit y parameter 2 , its exp ectation is 2 + k , so that E h log p ( y | ˆ β ) p ( y | ~ 0) i = 1 2 2 + k . Note that the GW and signal-pro cessing litera ture is sometimes confusing, as b oth 2 and H k , or their square ro ots, are commonly referred to as the SNR . In co mmon sig nal detection problems, the sig nal mo del is us ually o nly partially line a r, as suggested in Sec. II C 2 , so that analytical ma x imization over the “linear” param- eters only yields a maximized conditio nal likelihoo d, or profile lik elihoo d. The statistic H k then is propo r tional to the profile likelihoo d, and (since the likelihoo d under the “nois e only” null hypothesis, p ( y | ~ 0), is a cons tan t) constitutes a generalized Neyma n- Pearson tes t statistic. This statistic, or its maximum ov er additional parame- ters, is commonly referred to as a detection sta tistic , as it is used to find the sig na l fitting the data best, and to deter mine its significance. The detection sta tis tic’s distributions under null and alterna tiv e h ypotheses as stated above only apply for a single (conditional) lik eli- ho od maximization, i.e., for a given data set y and a given mo del matrix X . When maximizing the profile likelihoo d ov er additional parameters (or pieces of da ta), the test- ing problem turns in to a mult iple testing problem, a nd 4 the sta tistic’s distributio n will be an extreme v alue statis- tic [ 7 , 16 ]. Since the pa rticular statistic H k only comes up in the con text o f t he Gaussian mo del, we will in the following b e mostly referr ing to the more universal co r- resp onding likelihoo d ratio figur e p ( y | ˆ β ) p ( y | ~ 0) = exp( 1 2 H k ). D. Common i mplementation and terminology In the GW data a na lysis literature, likelihoo ds and matched filters are commonly expressed in ter ms of the inner pro duct h a, b i of real-v alued functions (signal tem- plates or data) a and b , technically defined in terms o f analytical F ourie r transfo rms, h a, b i = Z ∞ −∞ ˜ a ( f ) ˜ b ( f ) ∗ S 1 ( f ) d f (18) [ 6 , 14 ], whic h in pra ctice is implemented (analogously to the Whittle lik elihoo d) in ter ms of disc r ete F ourier transforms, h a, b i (19) = 2 N/ 2 X j =0 ∆ t N h Re ˜ a ( f j ) Re ˜ b ( f j ) + Im ˜ a ( f j ) Im ˜ b ( f j ) i S 1 ( f j ) . In ter ms of the linear mo dels discussed in the previous section, this is equiv alent to a quadr a tic form ~ a ′ Σ − 1 ~ b (20) as in Eqs . ( 9 ), ( 10 ) a b ov e. No te that esp ecially in the context of the Studen t- t model discussed b elow, ex pres- sion ( 18 ) may b e hard to motiv ate, as it is con tin uous in frequency , but the co rresp onding discrete expres sion ( 19 ) may readily be related to expr essions derived a bove. In this terminolog y , the signal-to-no is e r a tio of a signa l s θ ( 16 ) turns out as 2 = X j | ˜ s θ ( f j ) | 2 N 4∆ t S 1 ( f j ) = 2 h s θ , s θ i , (21) the corr elation o f some data d with a template s θ (as in ( 9 )) simplifies to X j h Re ˜ d ( f j ) Re ˜ s θ ( f j ) + Im ˜ d ( f j ) Im ˜ s θ ( f j ) i N 4∆ t S 1 ( f j ) = 2 h d, s θ i , (22) the likeliho o d ra tio of so me signal template s for given data d is log p ( d | s θ ) p ( d | ~ 0) = P j | ˜ d ( f j ) − ˜ s θ ( f j ) | 2 S 1 ( f j ) P j | ˜ d ( f j ) | 2 S 1 ( f j ) (23) = 2 h d, s θ i − h s θ , s θ i (24) [ 3 , 6 , 14 ], and the maximized likeliho od ra tio for a s ig nal that is a linear co mbination of wa veforms ( d = P j β j s j + n , see also ( 12 )) then is log p ( d | ˆ β ) p ( d | ~ 0) = X j h d, s j i 2 h s j , s j i . (25) An implemen ta tion of a matc hed filter in the GW co n- text is concisely describ ed e.g. in [ 17 , 18 ]. The sig nal searched for is a “c hirping” binar y inspiral wav e form of increasing frequency a nd amplitude, whic h is character- ized by five parameters , namely t w o mass parameters determining the phase/ amplitude ev olution, and ampli- tude, phase and arriv al time. The signal wa veform s for given mas s para meters ϑ = ( m 1 , m 2 ) is (in analogy to ( 4 )) given in terms of “sine” and “cosine” comp onent s s s ,ϑ and s c ,ϑ , s ϑ ( t ) = β s s s ,ϑ ( t − t 0 ) + β c s c ,ϑ ( t − t 0 ) (26) [ 17 ], wher e β s and β c are determined by the orbital phase and or ien tation of the binary system, and t 0 defines th e signal arriv al time. The sine and cosine wa veforms here constitute the sig nal manifold’s orthogo nal “basis v ec- tors”. The actual matched-filter detection statistic is de- fined as ρ ( t 0 ) = p X s ( t 0 ) 2 + X c ( t 0 ) 2 , where X s / c ( t 0 ) ∝ Z ˜ d ( f ) ( ˜ s s / c ,ϑ ( f )) ∗ exp( − 2 π i f t 0 ) S y ( | f | ) d f (27) [ 17 ], and where the exp onential ter m does the time shift- ing of data and templa te against each other. F or any given time shift t 0 , this filter cor resp onds to (the square ro ot of ) the detection statistic H k ab ov e ( 14 ). Comput- ing the matched filter ( 27 ) acr o ss time p oints t 0 yields the pr o file likeliho od, the conditiona l likeliho od (condi- tional on time t 0 and wa veforms s s ,ϑ , s c ,ϑ ) ma ximized ov er phase and amplitude. The “ov er all” maximum like- liho od then is determined v ia a brute-force search ov er t 0 and ov er a dditional alternative sig nal wa v eforms co r re- sp onding to differen t mass parameters ϑ . Note that the search over arr iv al time t 0 in ( 27 ) may be efficiently implemen ted via another F ourier transform [ 18 ]. The matched-filtering algorithm is a lso describ ed in mo re de- tail in Appendix A 3 . In order to claim the detection of a signal, one needs to determine a threshold for the detec tio n statistic (the maximized lik eliho od), with re s pect to some pr e - specifie d false alarm rate. The detection statistic’s distributions derived in Sec. I I C 4 are likely not to b e of muc h prac- tical relev ance, due to common non-Gaussian or nonsta - tionary features in the data . Critical v alues for the de- tection statistic instea d ar e commonly computed using bo ots tr apping methods (see e.g. [ 19 , 20 ]). 5 x probability density Gaussian density Student− t density ( ν =10) Student− t density ( ν =3) µ µ + 2 σ µ + 4 σ 1e−05 1e−03 1e−01 x y µ µ + 2 σ µ + 4 σ µ µ + 2 σ µ + 4 σ Gaussian density Student− t density FIG. 1. Den sit y functions of Gaussian and Stu dent- t distributions. The left panel shows univ ariate densities on the loga rithmic scale. The right p anel shows density contours of t he join t distribution of tw o indep endent Gaussian random v ariables in con trast with tw o indep endent S tudent- t distributed v ariables of the same location ( µ ) and scale ( σ ) . The tw o Stud en t- t va riables hav e differing degrees-of-freedom; the one corresp onding to the x axis has ν = 3, while the one along the y axis has ν = 10. II I. THE STUD E NT -T FIL TER A. The Student-t noise model The Student- t mo del for time ser ies a na lysis was in- tro duced in [ 3 ] as a genera lization of the commo nly used Gaussia n model describ ed in the pr evious section. The Student- t distribution has an additional degrees-of- freedom para meter, essentially controlling the distr ibu- tion’s hea vy-tailedness, i.e., the allo w ance for large out- liers. The Studen t- t lik eliho o d function is g iven b y p ~ d | θ ∝ Y j 1 + 1 ν j ˜ d ( f j ) − ˜ s θ ( f j ) 2 N 4∆ t S 1 ( f j ) − ν j +2 2 (28) = exp − X j ν j +2 2 log 1 + 1 ν j ˜ d ( f j ) − ˜ s θ ( f j ) 2 N 4∆ t S 1 ( f j ) (29) [ 3 ]. According to this mo del, the residuals (Re( ˜ n ( f j )), Im( ˜ n ( f j ))) within eac h F ourier frequency bin j follow a biv aria te Studen t- t distribution [ 8 ] with lo cation µ = ~ 0, scale matrix Σ = N 4∆ t S 1 ( f j ) 0 0 S 1 ( f j ) , degr ees-of- freedom ν j > 0 and implicit dimension 2 . This implies that (i) residua ls in differen t frequency bins are indep en- dent ; (ii) residua ls within the same bin are uncor related, but dependent; a nd (iii) the marg ina l distributio n o f each individual res idual is a Student- t distribution with scale prop ortional to S 1 ( f j ) and degr ees-of-freedom ν j . De- creasing v alues of the degr ees-of-freedom parameters ν j imply a heavier-tailed distribution, and in the limit of ν j → ∞ the mo del ag ain r educes to the Gaussian model. Besides s imply cons tituting a heavier-tailed noise mo del, the Student- t mo del arises as a g e neralization of the Gaussian mo del when the p ower sp ectral den- sity S ( f j ) is treated as uncertain, wher e the degr ees-of- freedom para meter ν j denotes the (prior) pre c ision [ 3 ]. So the mo del is not only applicable in co n texts where the noise itself is in fa ct t distributed, but also in ca s es where it is Gaussian, but the noise spectrum is a pri- ori o nly known to a certain a ccuracy . Alterna tiv ely , the same mo del would result when t he noise spectrum itself was a ssumed to be randomly deviating from the scale parameter S 1 ( f ), a ccording to a χ 2 distribution, e.g . b e- cause it is o nly estimated with some uncertain t y , whic h in fact resembles the original motiv atio n for introducing Studen t’s t -distribution in the context of the t -test and related pro cedure s [ 7 , 2 1 ]. Both r andomness or uncer- taint y of the noise PSD technically lead to the sa me lik e- liho od ex pression here [ 3 ]. In gener al, the interpretation of the scale parameter S 1 ( f ) in the contexts of the Ga us- sian and the Student- t mo del is not necessar ily exactly the s ame. F or the Gaussian mo del, it may b e defined via the exp ected p ow er S 1 ( f j ) = E 2 ∆ t N | ˜ n ( f j ) | 2 , while for the Student- t mo del this only ho lds in the limiting case of grea t certain t y ( ν → ∞ ). Within the Studen t- t mo del, the S ( f ) term sp ecifies the scale o f the uncer- tain PSD pa r ameter and the exp e c ted p ow er is in fact given by E 2 ∆ t N | ˜ n ( f j ) | 2 = ν j ν j − 2 S 1 ( f j ). The choice of the degrees-o f-freedom parameter ν j as w ell as the sp ec- trum parameter S 1 ( f j ) may b e appro a c hed in different wa y s and may for the filtering pur pos e ev ent ually b e con- sidered a matter of tuning [ 3 ]. In the example in Sec. IV below, w e simply kept the scale parameter S 1 ( f j ) to b e the estimated noise sp ectrum as in the Gaussian case, a nd fitted a common degrees-o f-freedom parameter ν j = ν for all frequency bins to the empir ic al da ta. B. Comparison to the Gaussian model When co mparing to the Gaussian distribution, first of all the Studen t- t distribution exhibits heavier tails , i.e., the pr o babilit y for obtaining “ large” v alues (relative to 6 the distribution’s scale) is muc h greater. While the den- sity functions are very similar within the r ange of µ ± 2 σ , where the bulk of pr obability is concentrated, the densi- ties’ ratio will grow indefinitely tow ard the distributions’ tails (see Fig. 1 ). The degr ees-of-freedom parameter ν controls the distribution’s heavy-tailedness; a setting of ν = 1 y ields the “pathologica l” Cauch y distribution, for ν > 2 the v aria nce is finite, a nd in the limit of ν → ∞ it again approaches the Gaussian distribution. Another discrimina ting feature is the shape of the den- sity contours. While a Gaussian density will always hav e elliptical contours, the Studen t- t dis tr ibution is differ- ent in that its contours a re rather diamond-shap ed, with elongations p ointin g alo ng the principal a x es (see Fig. 1 ). This wa y the Studen t- t mo del do es not o nly allow for larger outliers, but it also considers outliers more likely to o ccur only in individual v aria bles rather tha n jointly in all v ar iables. Note that this latter effect follo ws from the fact the different frequency bins are stochastically inde- pendent and not merely uncor related [ 22 , 23 ]. Since the t wo (rea l and imaginary) r esiduals within each F o urier frequency bin follow a joint, biv ariate, t distribution, the density contours within bins will still be spher ic al— otherwise a str ange phase/amplitude dep endence w ould be implied for the F o urier-domain model. The effect of independent Student- t v ar iables only comes to bear b e- t ween frequency bins. An impo r tan t difference to note b et ween the Ga ussian and Studen t- t model is that the lea s t-squares fitting that results fro m the Ga ussian mo del will actually b e a ML pro cedure for any mo del within the wider c lass o f “ellip- tically symmetric ” mode ls for the noise residuals (includ- ing e.g. a Student- t model with merely uncorre la ted , but not indep endent re s iduals) [ 22 , 23 ]. The Studen t- t mo de l describ ed here hence adv ances into a fundamentally dif- ferent class of mo dels. Studen t- t or similar mo dels ar e commonly used in pa- rameter estimation co ntexts as ro bust alterna tives to the Gaussian mo del that ar e less sensitive to outliers in the da ta [ 24 – 27 ]. Such mo dels may b e motiv ated in a “top-down” manner b y the observ ation that the data do not actually fit the Gaussianity ass umption, or also in a “b ottom-up” wa y by p ointing out that the r esulting least-squar es proc edures ar e very sensitive to o ccas ional outliers in the data . In the spirit of the latter view- po in t, the co ncept of M es timation was introduce d, which aims at “fixing” o utlier-sensitive least-squares pro cedur es by repla cing them by mo re robust statistics co rresp ond- ing to more fav o rable influence functions [ 28 , 29 ]. Sim- ilar approaches, namely down-w eig h ting or ignorance of outliers in the data, have b een pro p osed in the context of gravitational-wav e detection befor e [ 30 , 31 ], and the Studen t- t assumption may in fac t b e considered a sp e- cial case of M es timation [ 26 , 27 ]. Another fix that is commonly applied in GW data anal- ysis is the χ 2 veto [ 32 ], which is a figur e computed alo ng with a detectio n sta tistic that is suppo sed to discr iminate actual signals from noise bursts. Such noise even ts ma y show little similarity with the signal template, but may often, due to non-negligible corr elation with the template and v ery large pow er, still seem to indicate the presence of a s ignal. The χ 2 veto then essentially chec ks for excess power that is inconsis tent with the shape of the signals aimed for and th at wa y will rule out such alleged detec- tions. The considera tion o f excess residual p ow er is also implicitly happ ening in the Studen t- t mo del. F rom the different likelihoo d for m ulations (( 3 ), ( 29 )) one can write down the corresp onding likeliho o d ra tios for some data d and a s ignal template s θ , log p ( d | θ, Gauss) p ( d | ~ 0 , Gauss ) = X j 1 2 ˜ d ( f j ) 2 N 4∆ t S 1 ( f j ) − ˜ d ( f j ) − ˜ s θ ( f j ) 2 N 4∆ t S 1 ( f j ) ! , (30) log p ( d | θ, Student) p ( d | ~ 0 , Student) = X j ν j +2 2 log 1 + 1 ν j ˜ d ( f j ) 2 N 4∆ t S 1 ( f j ) 1 + 1 ν j ˜ d ( f j ) − ˜ s θ ( f j ) 2 N 4∆ t S 1 ( f j ) . (31) In bo th of the ab ov e cases the likeliho o d ratio is a func- tion o f the “data p ow er” ˜ d ( f j ) 2 N 4∆ t S 1 ( f j ) and the “r esidual power” ˜ d ( f j ) − ˜ s θ ( f j ) 2 N 4∆ t S 1 ( f j ) , i.e., the data’s nor ma lized s um- of-square s in each frequency bin j b efore and after sub- tracting the signal s θ . F or the Gaussian cas e, a “data power” of 10 and a “residual p ow er” of 1 in the j th bin would hav e the sa me effect on the likeliho od r a tio as if t he n um bers were, sa y , 1010 and 1 0 01 instea d; the only relev ant fi gure is their difference. In the Student- t mo del, the latter case w ould lead to a low er likeliho o d ratio; here not only the amount b y whic h the signal s θ is able to reduce the sum-o f-squares is relev ant , but so is its magnitude relativ e to t he r emaining re sidual term. The additional feature of the ML fit that is intrinsically con- sidered in the Student- t likelihoo d ratio ( 31 ) is essentially the corresp onding co efficien t of determination ( R 2 ) [ 15 ]. As will beco me obvious in the following, when the actual implemen tation is describ ed, the genera lization to the Studen t- t mo del will on the tec hnical side essentially re- place the least-squa res pro cedure by an adaptive version. The adaptation step again ensures that exc ess r esidual noise pow er will do wn w eight the suppose d significa nce of a signal. C. Likeliho od maximization: the EM- algorithm While likelihoo d maximiza tio n in the Gaussian model bo ils down to least-squar es fitting, the max imization s tep is not quite as simple for the Student- t mo del. How ev er, 7 due to the structure of the pro blem, the expectation- maximization (EM) algor ithm ma y b e use d to efficiently maximize the likelihoo d function [ 8 , 33 ]. In order to a p- ply the EM algorithm, the likelihoo d expression needs to be r eformulated. The Student- t likelihoo d may be viewed as a mar ginal lik eliho o d, av er aging out a set of unknown v aria nc e parameters ~ σ 2 [ 3 ]. Each of the v ariance pa ram- eters σ 2 j then corresp onds to the pow er sp ectral density at the j th F ourier fr equency bin. The EM alg orithm’s details as applied to the present problem are derived in detail in App endix A 2 below. It tur ns out that maxi- mization of the Studen t- t likelihoo d may be done in a n iterative manner, where each iteratio n again r equires a weigh ted least-squar es fit as in the Gaussian matc hed fil- ter. The E M algor ithm requires a s tarting v alue θ 0 for the signal parameters . Giv en θ 0 , the expression E ( θ 0 , θ ) = − 1 2 X j ˜ d ( f j ) − ˜ s θ ( f j ) 2 N 4∆ t ν j ν j +2 S 1 ( f j )+ 2 ν j +2 2∆ t N ˜ d ( f j ) − ˜ s θ 0 ( f j ) 2 (32) is maximized with r espe c t to the parameter vector θ . The parameter v a lue maximizing the ab ov e expr ession then constitutes the new θ 0 v alue, for which the expr ession again is maximized, and so forth. The resulting sequence of para meter v alues then conv er ges to the max im um like- liho od es timate ˆ θ [ 8 ]. Maximizing the above ex pression ( 32 ) again amounts to a weight ed least- squares fit, exactly a s in the cas e of t he Ga ussian matched filter (s e e also the corresp ond- ing lik eliho o d expr e s sion ( 3 )). The Studen t- t filter will therefore generalize the Gaussian matched filter by re- placing the least-squa res pro cedure by an iterative, or adaptive, least-squar e s fit. Note that the denominator in ( 32 ) simply is a weigh ted av e r age o f the noise spec - trum (as in ( 3 )) and the pre v ious iteration’s residual noise power, where the degrees-of-freedo m pa rameter ν defines the r elative w eigh ting. Instead of the “plain” weigh ted least-squar es match that is done in the Gaussia n filter, the EM- iterations a dapt the weigh ts (the denominator in ( 32 ), whic h in the Gaussia n mo del was the a pr iori known, fixed no is e spectrum) to the residua l noise p ow er as found in the data, and the lev el of adaptation is reg- ulated by the degrees- of-freedom para meter ν . The (ML) detection statistic do es not follow a simple distributional form as in the Gaussian model, but in the example below one can a lready se e that b oth statistics still b ehav e similarly . The generalized likelihoo d ratio statistic will, by Wilks’ theor e m, in fact still appr oxi- mately follow a χ 2 distribution [ 7 , 34 ]. D. The filter implementation As for the Gaussian matched filter, the aim aga in is to maximize the likelihoo d ( 29 ), i.e., find b est-fitting pa - rameter v a lues ˆ θ in par ameter space. Again, it is a d- v antageous if the sig nal mo del can (at le ast partly) b e formulated as a linear mo del. There a re tw o obvious p oints in the ma tc hed-filtering pro cedure at which one could insert the EM-itera tions in o rder to genera lize it to the Studen t- t case: either a t the level o f each (origina lly analytical) maximization o ver linear mode l coefficie nts (usually corres p onding to ampli- tude and phase), or a t a higher lev el, iter ating ov er linear co efficient s as well as the signal arr iv al time para meter. It is not ob v ious whether one implemen tation is mor e sen- sitive than the other, but there definitely ar e differences in the implied co mputational costs. Both approaches are describ ed and discus sed in mo r e de ta il in App endix A 3 . An implement ation of the la tter algorithm, tog ether with the a nalogous ma tc hed filter, is av ailable in [ 35 ]. In ca se of a brute-for c e sear ch over additional signal par ameters (i.e., a “template bank ” ), one could in fact consider mov- ing the EM-level yet another stag e higher. As a starting parameter v a lue ( θ 0 ) for the algorithm, one could, for exa mple, use the null vector or an ini- tial least-squares fit. As a stopping criterion, one could terminate the algor ithm once the improvemen t in loga- rithmic likeliho od fr om the previo us iteration falls b elow some threshold, or when some maximum n um ber of iter- ations is reached. Note that—unlike for the Gauss ian lin- ear least-s quares fit—the (conditional) likelihoo d might actually be m ultimodal [ 36 ], so that different starting v alues might lead to different results. It is not obvious whether this occur s fre q uen tly in practice, or rather r e - quires particularly rare pathological circumstances; how- ever, it does not appear to p ose a problem in the example below. IV. FIL TERING EXPERIMENT ON ACTUAL DA T A A. General Besides any theoretical or heuris tic arguments wh y a Studen t- t ba sed filter may improv e detection, the fig ure of even tual relev a nce is go ing to b e the resulting improv e- men t in detec tio n efficiency when applied to a c tual da ta — keeping in mind the additional complica tion and com- putational cost. In the following, we will demonstrate the filter’s performa nce in a minimalistic, yet realistic toy problem. T o that end, we will s et up a filter for a certain kind of par ametrized signa l, a nd then test it aga inst a conv en tional matched filter using injections of simulated signals. F or the additive noise, we will use both simu- lated Gaussian no ise as well a s actual gr avitational- wav e detector instrument noise. Detection e fficie nc y is go ing to be measured via the receiv er op era ting characteristic (R OC) curve, allowing o ne to compare detection proba- bilities for given false alarm probabilities, or vice v ersa. In or de r to make the example re alistic, w e req uire a nontrivial signa l wav eform to b e searched for ; in par - ticular the wav efo r m should not b e mono chromatic, but should instead span a wider range o f F ourier frequencies . There should be parameters to be maximized ov er ana- 8 theoretical quantile empirical quantile 90 % 99 % 99.9 % 99.99 % Gaussian Student− t ( ν = 40) Gaussian noise 5 10 20 5 10 20 theoretical quantile empirical quantile 90 % 99 % 99.9 % 99.99 % Gaussian Student− t ( ν = 10) Instrument noise 5 10 20 5 10 20 FIG. 2. Quantile-quan tile plots (Q-Q plots) of the empirically found normalized residual noise p o w er ( 33 ) versus its theoretical v alues assuming Gaussian and Student- t models. The marks indicate p articular quan tiles corresp onding to p ow ers of 10 in tail probabilit y . The 10 largest emp irical samples are shown as individu al dots; the remaining quantil es are connected b y a line. lytically a s well as numerically , and w e should use noise that is non-Gaussian or nonsta tionary . The ex ample de- scrib ed in the following mimics t he setup of a sear ch for binary inspiral signa ls in interferometric gravitational- wa ve detector da ta (s e e e.g . [ 17 ]). The noise data are taken fro m an actual detector, and, for compariso n, a second da ta set o f simulated, Gaussian no is e of a realis- tic noise sp ectrum is us ed in para llel. The “search” being per formed ho wev er is m uc h simplified and no t intended to b e exhaustive or to s pan an astrophysically sensible parameter range. B. The dat a The data used in the f ollowing examples are going to be either simulated Gaussian no ise with a p ow er sp ec- tral density co rresp onding to LIGO’s initial design sen- sitivity [ 37 ], or r eal instrument noise from LIGO’s Liv- ingston in terferometer, tak en dur ing LIGO’s fifth science run (“S5”) in la te 2005 [ 38 ]. The data will b e considered in ch unks of 8 seconds length, downsampled to a sampling rate of 102 4 Hz, and windo w ed using a T uk ey w indow ta- per ing 10% of the da ta (5% at ea c h end). The noise’s power sp ectral density S 1 ( f ) is estimated esse ntially us- ing W elch’s metho d [ 39 ], b y considering the empirical power in the 3 2 preceding data segments, and taking the median as a ro bust estimator. The figures shown in th e following ar e each ba s ed o n 10 0 0 00 such data ch unks. The signal wa v eform searched for here is taken to be a binary inspiral w a veform approximated to the 2.0 p ost- Newtonian order [ 40 ]. The sa me wa v eform family is used for both injections as w ell as in the detection stage, and it has five free parameters: chirp mass ( m c ), mass r atio ( η ), coalescence time ( t c ), c o alescence phase ( φ c ), and ampli- tude ( A ). The signa l wa veforms injected int o the data were all do ne at the same mas s parameter s ( m c = 4 . 5 , η = 0 . 25 ), and the amplitude is s e t such that the sig - nal’s SNR (as computed based on the curr en t PSD es - timate) is = p 2 = 5 . 25 7 so that E h log p ( y | β ⋆ ) p ( y | ~ 0) i = 1 2 2 = log(1 0 6 ) a nd E h p ( y | β ⋆ ) p ( y | ~ 0) i = exp 2 = 10 12 (see also Sec. II C 4 ). Each 8-second chun k of data is even tu- ally analyzed t wice, with and without a s ignal injection. C. Setting t he degrees-of-freedom parameter In order to deter mine a suitable degrees-of- fr eedom pa- rameter ν for the Student- t mo del, we considered the tail behavior of the noise. If the Gaussia n (Whittle) mo del was a ccurate, then the normalized F ourier- do main no ise power at the j th freque nc y bin, ˜ n ( f j ) q N 4∆ t S 1 ( f j ) , (33) being the square ro ot of the sum of t w o indep endent stan- dard Gaussian random v ar iables (see Sec. II B ), sho uld follow a Rayleigh distribution . The residuals’ normaliza - tion here is done — in analogy to the computations done in an actual search — via the es timated noise sp ectrum, as describ ed in the previous subsection. W e are o nly con- sidering the binned noise p ow er here (and not the individ- ual rea l and imaginar y compo nen ts) as this is the relev ant figure en tering both the Gaussia n as well as the Student - t likelihoo ds (( 3 ), ( 29 ), ( 30 ), ( 31 )). Under the Student- t mo del, instead of being Ra yleigh distr ibuted, the pow er ( 33 ) w ould instead follow a similar, more heavy-tailed distribution. W e will r efer to the Studen t- t p ow er ’s distri- bution as the “ Studen t-Ra yleigh ” distribution here; mor e details o n this distr ibution’s particula r form a re given in Appendix A 4 . W e inv estigated the empiric a l distribution of a ctual noise re siduals, for both sim ulated and actual instrumen- tal data. F or the simulated data, this will account for effects of finite sample size, windo wing and PSD estima- tion, and for actual data it will in addition give some in- 9 maximized Gaussian LR maximized Student− t LR Gaussian noise 10 6 10 12 10 18 10 6 10 12 10 18 2 3 4 5 6 7 8 9 2 log ( max. LR ) 2 3 4 5 6 7 8 9 2 log ( max. LR ) noise only signal injection maximized Gaussian LR maximized Student− t LR Instrument noise 10 6 10 12 10 18 10 6 10 12 10 18 2 3 4 5 6 7 8 9 2 log ( max. LR ) 2 3 4 5 6 7 8 9 2 log ( max. LR ) noise only signal injection FIG. 3. D etection statistics (maximized lik elihoo d ratios) based on Gaussian and Student- t models for sim ulated Gaussian data (left p anel) and actual in terferometer noise (right panel). Injections were of SNR = 5 . 257. sight into the effects of realistic nonstationa rities o r non- Gaussianities in actual measurement noise. The noise samples are ba sed on the residuals fro m 200 eight-second noise realizations of either sim ulated Gaussia n noise, or actual instrument noise fro m LIGO’s Livings ton inter- ferometer. The r esiduals ( 33 ) are each no rmalized via a PSD estimate fr om 32 pre ceding noise sa mples, as de- scrib ed in the previous section, y ielding a tota l of 800 000 residuals. The data us e d here did not overlap wit h the data used in the following detection exp eriment. Figure 2 shows quantile-quan tile plo ts (Q- Q plots) il- lustrating ho w w ell the mo dels fit the actual data. The axes indicate theoretical (Rayleigh or Student-Ra yleigh) quantiles, and the empirical quant iles as found in the data. If a mo del fits the da ta w ell, both theoretica l and empirical quantiles sho uld c oincide, so that the quan tiles follow a str aight, diagonal line. A mismatch b et w een mo del and data results in a diff erently sha ped curve; in particular, if the data are more heavy-tailed than pr e- dicted by the mo del, the curv e will show an upw ard b end [ 41 ]. One ca n see that the actual data exhibit hea v ier tails in both cases of sim ulated, Gaussian nois e as well as the instrument noise. In the case of Gaussian noise this is due to the es timation uncertaint y in the noise sp ectrum. If we had b een using the mean instead of the median to esti- mate the noise PSD, then the dis tribution of normalized noise residuals should be ex actly Student- t with degrees of freedom equal to twice the nu mber of noise samples av eraged ov er (here, 32 × 2 = 64) [ 7 , 21 ]. F or the media n estimation metho d, this is o nly approximately true, but apparently still roug hly accur ate; a maximum-lik eliho o d fit for ν suggests a v alue of ν ≈ 40 he r e. F or the ca se of Gaussia n data, the mismatch b etw een assumed a nd observed quantiles is minimal anyw ay . F or the real in terferometer noise, the discrepancy be- t ween Gaussian model and a ctual da ta is more dra matic; in the distribution’s tails, the empirical quan tiles a re s ig- nificantly larger than the assumed quantiles. F or ex am- ple, accor ding to the Gaussian mo del, 99 . 9 9 % of the s am- ples s hould b e ≤ 4 . 3, while empirically the 9 9 . 99 % quan- tile lies at 8 . 1 for a ctual instr umen t noise (see the righ t panel of Fig. 2 ). A Student- t model s eems to fit the data better , especially in the distributions’ tails, although dis- crepancies in the extre me outlier s a re still larg e. T ry- ing to estimate the degrees - of-freedom parameter ν from different subsets of the empiric al data yields ML esti- mates roughly in the range fro m 5 to 50 ; in the follo wing we simply fixed the par ameter a t ν = 10 for the sim- ulations inv olving actual data. A v a lue of > 4 0 would not seem to mak e sense here (even if the data w ere p e r - fectly Gaussian) and in the simulation res ults b elow we found that detection p erformance seemed to dep end o nly weakly on ν as long as it was roughly in the ra nge 5– 20. While the Studen t- t distr ibution do es no t fit the data per fectly , it seems to fit b etter than the Gaussian mo del. Instead of only fitting the degrees-o f-freedom pa rameter, one co uld actually in a dditio n also adapt the t distribu- tion’s scale to the da ta ( see also Sec. II I A , or [ 3 ]). D. Fil te ri ng se tup F or eac h piece of data, the lik elihoo d ratio is maxi- mized over phase a nd amplitude for giv en combinations of time a nd mass par ameter v alues, where the ev aluated time points were t c ∈ { 6 . 50 , 6 . 5 5 , . . . , 7 . 50 } and the con- sidered masses were η = 0 . 25, m c ∈ { 3 . 0 , 3 . 1 , . . . , 6 . 0 } . The injected signal’s par a meter v alues alwa ys were among the grid p oints maximized ov e r , so that s ig - nal/template misma tch considera tions are not of concern here. O n the technical side, this is implemented in a lo op ov er template wav eforms (corr espo nding to differen t mass pa r ameters) a nd time po in ts. A t each mass/time combination, co mputatio n of the conditionally maxi- mized Gauss ia n likelihoo d ratio a moun ts to co mputing an inner pro duct / quadratic form (see Sec . II C ), while maximizing the conditional Studen t- t likeliho od requires iterating ov er several such lea st-squares fits within the EM alg orithm (see Sec. II I C ). The EM itera tions were 10 P(false alarm) P(detection) Gaussian noise Gaussian matched filter Student− t filter 0.002 0.010 0.050 0.200 1.000 0.4 0.5 0.6 0.7 0.8 0.9 1.0 P(false alarm) P(detection) Instrument noise Gaussian matched filter Student− t filter 0.002 0.010 0.050 0.200 1.000 0.002 0.010 0.050 0.200 1.000 FIG. 4. ROC curves for the Ga ussian and the Student- t detection s tatistics in both data scenarios. The shaded area marks the region where an y sensible detection statistic (one t h at is not worse than mere guessing) should lie. terminated whenever the improv emen t in logarithmic likelihoo d o ver the previous iter ation fell b elow 10 − 6 . In this example setting, this lead to an av erage num ber of four EM iter ations for each conditional likelihoo d max- imization in b oth noise scenarios . The eventu al ma x i- mized likeliho o d then is given by the overall maximum ov er the co nditional maxima, and as the detection s tatis- tic w e use the maximized likeliho o d ratio p ( d | ˆ θ ) p ( d | ~ 0) . The algorithm used was ess e ntially the one described in Ap- pendix A 3 d . E. Simulation results Figure 3 shows resulting detectio n statistic v alues (maximized likelihoo d ra tios) under the Gaus sian and the Studen t- t mo dels b o th when a signal is injected as well as when he data are nois e only . The signal inj ections here were all done a t the same amplitude relative to the noise sp ectrum (SNR = 5 . 2 57). In gener al, b oth detection statistics are very similar; the Student- t likeliho od ratio tends to turn out sligh tly low er than the Gaussian one, in particular in the case of r eal in terferometer no ise. The ques tion of to what e x ten t these differe nc e s af- fect the a bilit y to discriminate signals from noise will be approached by consider ing the re c e iv er op erating char- acteristic (R OC) curves. ROC curves are based on the detection statistics’ (here : empirical) distributions. Plac- ing different detection thresholds on a detectio n statistic yields a c o rresp onding false alarm pr obability (based o n the dis tribution under the noise-only h ypothesis ) as well as a detection probability (based o n the distribution un- der the particular signa l hypothesis). T he R OC curve illustrates these combinations o ver v arying thres hold v al- ues [ 42 ]. Figure 4 shows ROC curves for the Gaussian and the Studen t- t filter for bo th no ise cases . In the case of sim- ulated Gaussian noise, b oth detection statistics perform almost identically . F or rea l instrumen t nois e o n the other hand, the Studen t- t model is able to provide a signif- icantly greater detection proba bilit y especia lly at low false-alar m proba bilities. A remar k able feature of the R OC cur ves for instrumental no ise is that for very low false ala rm probabilities b oth filters even tua lly p erform as po or ly as m ere guessing. The Student - t filter is able to sustain its discriminating pow er for lo w er false alarm rates, though. This effect is connected to the frequency of noise outliers (“glitches”) in the data, leading to very large detection statistic v alues ev en in the absence of a signal. Figure 5 shows the corres p onding detection thresholds as a function of false-alarm probabilities. The po in t where the detection threshold reaches the injected signals’ SNR is where the corresp onding detection proba- bilit y is ≈ 50%. One can see that, due to the heavy-tailed distribution of detection statistics in the case of ac tual in- strument noise, the detection thr eshold nece s sary for low false-alar m probabilities very q uickly grows b e y ond v a l- ues th at could ob viously be attributed to b e due to the signal injections considered her e; the rate o f noise tran- sients of “SNR” gr e ater than the injections’ SNR exceeds the false alarm ra te (in a realistic search, some of these might actually be vetoed beforeha nd). This effect is very obvious here also beca use signal injections were done only at a single SNR, but it will o f course p ersist for other SNR distributions—assuming other SNR distributions for in- jections will affect the detection probability , but not the detection threshold, i.e., the detection pro cedure itself. The e x act relative p erformance o f b oth methods of course dep ends on the details of the par ticula r detection problem, the kind of signal searched for, the para meter space, noise c ha racteristics, data conditioning, and tun- ing parameters. The ROC curves shown ab ov e are based on a par ticular, artificial signal p opulation, but their gen- eral fea tures p ersist in a n um ber of additional simulations not shown here, for a range of degrees-of-freedom set- tings, injection SN Rs, data from a different instrument, and data from a differ en t time perio d. 11 P(false alarm) 5.257 0.002 0.010 0.050 0.200 1.000 1 10 6 10 12 10 18 0 3 4 5 6 7 8 9 10 threshold on maximized LR 2 log ( max. LR ) Gaussian noise, Gaussian filter Gaussian noise, Student− t filter Instrument noise, Gaussian filter Instrument noise, Student− t filter FIG. 5. Detection t hresholds on the maximized likelihoo d ratio (th e detection statistic), corresp onding to certain false- alarm p robab ilities. These thresholds are based on th e detec- tion statistic’s distribution in the absence of a signal. The horizon tal line indicates th e injected signals’ SNR (see also Fig. 4 ). V. CONCLUSIONS W e intro duced a generaliza tion of the matched filter that is commo nly applied in signa l detection problems. The Studen t- t filter is deriv ed as a maximum-likelihoo d detection method that is based on a Student - t distribu- tion fo r the noise, r ather than a Gaussian distribution, which would again yield the common matched filter in- stead. On the technical side, it generalizes a least-sq ua res metho d to an adaptive v a riety . While a “Gaussia n” matched filter is certainly appr opriate when the a ssump- tion of stationary Ga us sian noise and a kno wn sp ectrum is met, there are sev eral w ays to motiv a te the Stud ent- t filter as a robust alternative when these assumptions a re violated: (i) “ theoretica lly ”: the Student- t mo del allows for uncertaint y in the PSD, heavier-tailed noise and out- liers; (ii) “ heuristically ” : the resulting adaptive lea st- squares method is less outlier-s ensitiv e; or (iii) “ pragmat- ically ”: the filter ma y turn out more effectiv e in pr actice, as in the realistic example shown ab ov e. Besides tha t, being a generaliza tion o f the (Gaussian) matc hed filter, it sho uld gener ally b e able to perfor m as w ell or better. The question of course is whether the gain in detection efficiency is worth the additiona l implementation, tuning and computational e ffort. The difference in computa- tional co st for deriving bo th detection s tatistics sugg ests that a combined, hier archical sear c h s trategy may also be worth considering. In the example shown abov e, the Studen t- t model’s degrees-o f-freedom parameter was treated as a single con- stant. In the context of gravitational-wa ve in terferomet- ric data, this is an ov e rsimplification; a s tudy of actual instrument no ise shows tha t the F ourier- domain da ta’s tail behavior clear ly dep ends o n the fr e quency [ 43 , 44 ]. Accounting for this effect in an actual search b y fitting individual ν j parameters for different frequency rang es may yield a significa n t impro v emen t. It ma y also make sense to specify the degrees-o f-freedom parameter dep en- dent on additional infor mation, like e.g. the data quality category [ 45 ]. It will b e interesting to study the Studen t- t filter’s p er- formance in a realistic se a rch for gravitational-wa ve sig- nals, in conjunction with the existing infrastr uc tur e (data quality flags, additional v etoes, etc.) and in comparison with the conv entional ma tc hed filter [ 18 , 19 ]. W e are also in v estigating the use of the Studen t- t mo del in the context of Bayesian mo del selection [ 46 ]. Here it ma y again yield a mor e robust discr iminator for actual sig- nals against noise; on the co mputational s ide this prob- lem is based on in tegration of the likeliho o d, r ather than maximization, and we do not exp ect a difference in com- putational cost b etw een Gaussian and Student- t mo dels. W e exp ect the Studen t- t filtering pro cedure to be a lso useful in many other signal-pro cessing co n texts, wher- ever robustness or uncertaint y in the p ow er sp ectrum is an issue. ACKNO WLEDGMENTS The author wishes to tha nk Nelson Christensen, Drew Kepp el, Karsten L ¨ ubke, Renate Meyer, and Reinhard Prix for fruitful discussions at v ar ious s tages of this w ork, and the LIGO Scientific Collab oratio n (LSC) for pro- viding the data use d her e. The a uthor gratefully ac- knowledges the suppor t of the Unit ed States Na tional Science F ounda tion for the construction and op eration of the LIGO Lab orator y and the Science and T echnol- ogy F acilities Council of the United Kingdom, the Max- Planck-So c ie t y , and the State of Niedersachsen/Germany for s uppor t of the co nstruction and op eration of the GEO600 detector. The author also gratefully ackno wl- edges the supp ort of the resear c h b y these ag encies and by the Austra lian Research Council, the International Science Link ages progra m o f the Commo nwealth o f Aus- tralia, the Council o f Scie ntific and Industria l Research of India, the Istituto Nazionale di Fisica Nucleare o f Italy , the Spanish Ministerio de Educaci´ on y Cie ncia, the Con- selleria d’Economia, Hisenda i Innov aci´ o of the Govern de les Illes Balears , the Royal Socie t y , the Scottish F und- ing Council, the Scottish Universities Physics Alliance, The Na tio nal Aer o nautics a nd Space Administration, the Carnegie T rust, the Le verhulme T rust, the David and Lu- cile P ack a r d F oundation, the Research Corpo ration, and the Alfred P . Sloan F oundation. APPENDIX 1. Discrete F ourier transform The F ourier transform c on ven tion used in this paper is sp ecified below; it is defined for a real-v alued function h 12 of time t , sampled a t N discr e te time points, at a sam- pling rate of 1 ∆ t , and it maps fro m { h ( t ) ∈ R : t = 0 , ∆ t , 2 ∆ t , . . . , ( N − 1)∆ t } (A1) to a function of fre q uency f { ˜ h ( f ) ∈ C : f = 0 , ∆ f , 2 ∆ f , . . . , ( N − 1)∆ f } , (A2) where ∆ f = 1 N ∆ t and ˜ h ( f ) = N − 1 X j =0 h ( j ∆ t ) exp( − 2 π i j ∆ t f ) (A3) [ 3 ]. 2. Applying t he EM algorithm a. Pr eliminaries The exp ectation-maximizatio n (EM) algorithm is re- quired for maximizing the Studen t- t likelihoo d; see Sec. II I C . What is desir ed is the maximum of the marginal likelihoo d p ( d | θ ), whic h is equiv alent to the marginal density p ( θ | d ) when assuming a uniform prior distribution on θ . What is required in order to apply the E M algo rithm are expr essions inv olving the ma r ginal- ized σ 2 j parameters , namely , the co nditional distribution P( ~ σ 2 | θ, d ) and the joint density p ( θ , ~ σ 2 | d ). The EM algo- rithm will then iteratively max imize the likelihoo d func- tion by p erforming a lter nating “e x pectatio n” and “ma x- imization” steps [ 8 , 33 ]. The conditional poster ior distribution P( σ 2 j | θ, d ) of the j th v ariance parameter σ 2 j for given data and signal s θ is a scaled in v erse χ 2 distribution, Inv- χ 2 ν j + 2 , ν j S 1 ( f j ) j + 4 ∆ t N ˜ d ( f j ) − ˜ s θ ( f j ) 2 ν j + 2 (A4) [ 3 ] with probability density function f ( σ 2 j ) ∝ σ 2 j − ν j +4 2 exp − ν j 2 S 1 ( f j ) + 4 ∆ t N ˜ d ( f j ) − ˜ s θ ( f j ) 2 2 σ 2 j (A5) [ 3 ]. The co nditional distr ibutio n of the data d for given v aria nc e s ~ σ 2 and signal pa rameters θ , P( y | θ , ~ σ 2 ), is Gaus- sian [ 3 ], and the v ariance par ameters’ prio r, P ( ~ σ 2 ), again was Inv- χ 2 [ 3 ]. The join t conditiona l de ns it y of θ and ~ σ 2 for given data d is given by log p ( θ , σ 2 | y ) ∝ lo g p ( y | θ , σ 2 ) × p ( θ, σ 2 ) (A6) ∝ − X j log( σ 2 j ) + 4 ∆ t N ˜ d ( f j ) − ˜ s θ ( f j ) 2 2 σ 2 j − X j (1 + ν j 2 ) lo g( σ 2 j ) + ν j S 1 ( f j ) 2 σ 2 j (A7) = − X j (2 + ν j 2 ) lo g( σ 2 j ) + ν j S 1 ( f j )+4 ∆ t N ˜ d ( f j ) − ˜ s θ ( f j ) 2 2 σ 2 j (A8) [ 3 ]. b. The E step F or the EM algorithm’s expec ta tion step, one needs to ev aluate the conditional p osterior expe ctation E P( σ 2 | θ = θ 0 ,y ) log p ( θ , σ 2 | y ) = Z log p ( θ , σ 2 | y ) p ( σ 2 | θ = θ 0 , y ) d σ 2 (A9) as a function of θ for some given θ 0 [ 8 ]. Here, Z log p ( θ , σ 2 | y ) p ( σ 2 | θ = θ 0 , y ) d σ 2 (A10) ∝ − X j Z (2 + ν j 2 ) lo g( σ 2 ) + ν j S 1 ( f j )+4 ∆ t N ˜ d ( f j ) − ˜ s θ ( f j ) 2 2 σ 2 j × σ 2 − (2+ ν j 2 ) exp ν j S 1 ( f j )+4 ∆ t N ˜ d ( f j ) − ˜ s θ 0 ( f j ) 2 2 σ 2 d σ 2 j (A11) ∝ − X j 4 ∆ t N ˜ d ( f j ) − ˜ s θ ( f j ) 2 2 × Z 1 σ 2 j σ 2 − (2+ ν j 2 ) exp ν j S 1 ( f j )+4 ∆ t N ˜ d ( f j ) − ˜ s θ 0 ( f j ) 2 2 σ 2 d σ 2 j , (A12) where Z 1 σ 2 j ( ∗ ) z }| { σ 2 − (2+ ν j 2 ) exp ν j S 1 ( f j )+4 ∆ t N ˜ d ( f j ) − ˜ s θ 0 ( f j ) 2 2 σ 2 d σ 2 j = ν j + 2 ν j S 1 ( f j ) + 4 ∆ t N ˜ d ( f j ) − ˜ s θ 0 ( f j ) 2 , (A13 ) 13 since the term mar k ed by the asterisk ( ∗ ) is the densit y function o f an In v- χ 2 ν j + 2 , ν j S 1 ( f j )+4 ∆ t N ˜ d ( f j ) − ˜ s θ 0 ( f j ) 2 ν j +2 probability distributio n, so that Z log p ( β , σ 2 | y ) p ( σ 2 | β = β 0 , y ) d σ 2 ∝ − 1 2 X j 4 ∆ t N ˜ d ( f j ) − ˜ s θ ( f j ) 2 ν j ν j +2 S 1 ( f j )+ 1 ν j +2 4 ∆ t N ˜ d ( f j ) − ˜ s θ 0 ( f j ) 2 (A14) = − 1 2 X j ˜ d ( f j ) − ˜ s θ ( f j ) 2 N 4∆ t ν j ν j +2 S 1 ( f j ) + 2 ν j +2 2∆ t N ˜ d ( f j ) − ˜ s θ 0 ( f j ) 2 (A15) =: E ( θ 0 , θ ) . c. The M step In the EM algorithm’s maximization step, the a b ov e exp ectation E ( θ 0 , θ ) ( A15 ) needs to b e maximized with resp ect to the pa r ameter θ . The para meter v alue max- imizing the exp ectation then co nstitutes the nex t iter- ation’s “new” θ 0 v alue, for which then the ex pectatio n again is maximized, and s o for th [ 8 ]. As one can see from expr ession ( A15 ), maximization of the expectation again amoun ts to minim izing weigh ted least-squares, as in the Gaussian matc hed filter des cribe d above. 3. Pseudo co de matc hed and Studen t-t filters a. Pr eliminaries This section sketc hes actua l implementations of Studen t- t and (Gaussian) matched filters in comparis on. In the fo llowing, we will us e essentially the s ame con- ven tions as before; we will be considering a time series d of length N , sampled at a sampling in terv al of ∆ t . The signal w av efor m here is assumed to be a linear com bina- tion of a sine and a cosine comp onent ( s s ,θ , s c ,θ ), it has an as so ciated ar r iv al time parameter , a nd p ossibly ad- ditional par ameters θ (as in ( 26 )). Additional wa v eform parameters (other than a mplitude, phase, a nd time) are then co mmonly treated by running se v eral matched fil- ters co rresp onding to differ en t v alues of θ . The gener al- ization to the c a se o f more tha n tw o linear sig nal co mpo- nent s should b e stra ight forward. The profile likelihoo d will b e e v aluated along a discrete grid of time points τ i ( i = 1 , . . . , m ), where the sp ecial case of τ i = i ∆ t and m = N is of particula r interest. The filter’s output each time is a single num ber, the maximized (logarith- mic) lik eliho o d ratio of signal vs. no -signal models. W e will be making use of the inner pro duct / qua dr atic for m notation h a, b ; S i as defin ed in ( 19 ). Implementations of the a lgorithms sketc hed in Sec . A 3 c and A 3 e are also provided in [ 35 ]. T ABLE I. Matc hed fi lter, general implementatio n. normS = h s s ,θ , s s ,θ ; S 1 i normC = h s c ,θ , s c ,θ ; S 1 i for ( i = 1 , . . . , m ) do // lo op over time p oints: for ( j = 0 , . . . , N / 2) do // time shif t the data: 5: ˜ d ′ j = ˜ d j × exp(2 π i f j τ i ) end for prodS = h s s ,θ , d ′ ; S 1 i prodC = h s c ,θ , d ′ ; S 1 i // c ompute l o g-likeliho o d r atio / pr ofile l i keliho o d: 10: maxLLR [ i ] = ( prodS ) 2 / normS + ( prodC ) 2 / normC end for return max( maxLLR ) b. The “Gaussian ” matche d filter: gener al impl ementation The first alg orithm (T able I ) is a “na iv e” matc hed-filter implemen tation that maximizes the likelihoo d (-ratio ) ov er a g iv en g rid o f m time p oints ( τ ). The algo r ithm mainly cons ists of a loo p ov er time p oints, where for each time point the (co nditio nal) likelihoo d is maximized ov er amplitude and phase. In o rder to match signal and data for a certain signal arriv al time, the data d are time shifted against the signal w av e forms s s / c . The even tual result is the profile likelihoo d ev alua ted at the specified time p oints, the maximum of whic h then constitutes the generalized likelihoo d ratio detection statistic that is re- turned. c. The “Gaussian ” matche d filte r: efficient implementation If the time p oints to be maximized over are ta k en to be the same as the data time ser ies’ p oints ( τ i = i ∆ t , i = 1 , . . . , m = N ), then the matched-filtering pro cedure may be implemen ted muc h more efficiently . The alg orithm shown in T a ble I I will give identical results to the pre- vious, but it is mor e efficient as it tak es adv a n tage of a F ourier transform to e s sen tially maximize o ver ampli- T ABLE II. Matched filter, efficient implementation. normS = h s s ,θ , s s ,θ ; S 1 i normC = h s c ,θ , s c ,θ ; S 1 i for ( j = 0 , . . . , ( N − 1)) do // c orr el ate data and signals: corS [ j + 1] = ˜ d j × ˜ s ∗ s ,θ,j / S 1 ( f j ) 5: corC [ j + 1] = ˜ d j × ˜ s ∗ c ,θ,j / S 1 ( f j ) end for // apply F ourier t r ansforms: FTS = DFT( corS ) FTC = DFT( corC ) 10: for ( i = 1 , . . . , N ) do // pr ofile likeliho o d (-r atio): maxLLR [ i ] = ∆ t N 2 ( FTS [ N +1 − i ]) 2 normS + ( FTC [ N +1 − i ]) 2 normC end for return max( maxLLR ) 14 T ABLE II I. Stu dent- t filter, general implementation. LL0 = log( p ( d, S 1 , ν )) // lo g-li keliho o d noi se-only mo del for ( i = 1 , . . . , m ) do // lo op over time p oints: for ( j = 0 , . . . , N / 2) do // time shif t the data: ˜ d ′ j = ˜ d j × exp(2 π i f j τ i ) 5: end for // EM-iter ations: k = 1; ∆ LLR = 1; LLRprev = 0; S ⋆ 1 = S 1 while (∆ LLR > ∆ max ) and ( k ≤ k max ) do normS = h s s ,θ , s s , θ ; S ⋆ 1 i 10: normC = h s c ,θ , s c , θ ; S ⋆ 1 i prodS = h s s ,θ , d ′ ; S ⋆ 1 i prodC = h s c ,θ , d ′ ; S ⋆ 1 i ˆ β s = prod S / normS ˆ β c = prodC / normC 15: ˆ n = d ′ − ˆ β s s s ,θ + ˆ β c s c ,θ // ve ctor of noi se r esiduals LL1 = log( p ( ˆ n, S 1 , ν )) // lo g-li keliho o d si gnal mo del LLR = LL1 − LL0 // lo g-likeliho o d r atio ∆ LLR = LLR − LLRprev LLRprev = LLR 20: for ( j = 0 , . . . , N / 2) do // adapt the sp e ctrum: S ⋆ 1 ( f j ) = ν j ν j +2 S 1 ( f j ) + 2 ν j +2 2∆ t N ˆ ˜ n j 2 end for k = k + 1 end while 25: maxLLR [ i ] = LLR // pr ofile li keliho o d (-r atio) end for return max( maxLLR ) tude, phase, and time simultaneously (see also Sec. II D ). In practice, one may wan t to r estrict the profile likeli- ho od maximization (line 13 ) to the subset of sensible time shifts that do not “wrap” the sig nal circular ly a round the da ta’s end p oints. Ins tead o f a F ourier transform, one co uld also implement an inverse F ourier transfor m and w ould then also not need to time-reverse the result’s indices (line 11 ). d. The Student-t filter: gener al i mplementation This algorithm (s e e T able II I ) again is a “ge ne r al” version of the Student- t filter, analog ous to the g eneral matched filter (Sec. A 3 b ), where the set o f time po in ts τ is not re stricted. The E M alg o rithm here is a pplied a t the lev el of ea c h sing le amplitude/phas e maximization conditional o n so me time shift τ i . The EM comp onent requires the spe c ification of a threshold ∆ max on the im- prov emen t in logar ithmic maximize d likelihoo d ra tio (e.g. 10 − 6 ), a nd a thresho ld k max on the n um ber of EM itera- tions (e.g. 100). The Student- t likelihoo d function p ( x, S 1 , ν ) ∝ exp − X j ν j +2 2 log 1 + 1 ν j ˜ x j 2 N 4∆ t S 1 ( f j ) (see also ( 29 )) only needs to b e co mputed up to a pro- po rtionality constant her e , as only the lik eliho o d ratio is of even tua l int erest. T ABLE IV. Student- t filter, efficient implemen tation. LL0 = log( p ( d, S 1 , ν )) // lo g-li keliho o d noi se-only mo del // EM-iter ations: k = 1; ∆ LLR = 1; LL Rprev = 0; S ⋆ 1 = S 1 while (∆ LLR > ∆ max ) and ( k ≤ k max ) do 5: // the “plain ” matche d filter: normS = h s s ,θ , s s ,θ ; S ⋆ 1 i normC = h s c ,θ , s c ,θ ; S ⋆ 1 i for ( j = 0 , . . . , ( N − 1)) do corS [ j + 1] = ˜ d j × ˜ s ∗ s ,θ,j / S ⋆ 1 ( f j ) 10: corC [ j + 1] = ˜ d j × ˜ s ∗ c ,θ,j / S ⋆ 1 ( f j ) end for FTS = DFT( corS ) FTC = DFT( corC ) for ( i = 1 , . . . , N ) do 15: maxLLR [ i ] = ∆ t N 2 ( FTS [ N +1 − i ]) 2 normS + ( FTC [ N +1 − i ]) 2 normC end for // end of “plain ” m atche d filter . // Determine b est-fitting template, r esiduals, e tc.: i max = arg max i maxLLR [ i ] 20: for ( j = 0 , . . . , N / 2) do // time shi f t the data: ˜ d ′ j = ˜ d j × exp(2 π i f j τ i max ) end for prodS = h s s ,θ , d ′ ; S ⋆ 1 i prodC = h s c ,θ , d ′ ; S ⋆ 1 i 25: ˆ β s = prod S / normS ˆ β c = prodC / normC ˆ n = d ′ − ˆ β s s s ,θ + ˆ β c s c ,θ // ve ctor of noise r esiduals LL1 = log( p ( ˆ n, S 1 , ν )) // lo g-li keliho o d si gnal mo del LLR = LL1 − LL0 // lo g-likeliho o d r atio 30: ∆ LLR = LLR − LLRprev LLRprev = LLR for ( j = 0 , . . . , N / 2) do // adapt the sp e ctrum: S ⋆ 1 ( f j ) = ν j ν j +2 S 1 ( f j ) + 2 ν j +2 2∆ t N ˆ ˜ n j 2 end for 35: k = k + 1 end while return LLR e. The Student-t filter: efficient impl ementation The Studen t- t filter also ma y b e implemented more efficiently in cas e the sig nal arriv al times to maximize ov er are taken to b e t he time p oints of the or iginal time series ( τ i = i ∆ t , i = 1 , . . . , m = N , as in Sec . A 3 c ). This implemen tation (T able IV ) then requir es o ne to mov e the lev el at which the EM-a lgorithm is applied from the conditional maximization over amplitude and phase to the join t amplitude/phase/ time m aximization; effectively this implementation itera tiv ely runs sev eral matched filters (see lines 6 – 16 ) while a dapting the noise sp ectrum in b etw een. It is unclear whether o r how the level at whic h the EM-algor ithm is applied affects the re- sults; as noted in Sec. II I D , the likelihoo d may b e m ulti- mo dal and differen t implemen tations migh t end up with differing maximizatio n results, but whether this actually po ses a problem in practice is no t obvious. Computa- 15 0 2 4 6 8 10 0.0 0.1 0.2 0.3 0.4 0.5 0.6 probability density ν = 1 ν = 2 ν = 5 ν = 10 ν = 20 ν = ∞ probability density ν = 1 ν = 2 ν = 5 ν = 10 ν = 20 ν = ∞ 1e−06 1e−04 1e−02 0 2 4 6 8 10 FIG. 6. Probability density functions of Student-Ra yleigh distributions for v arying degrees of freedom ν and fixed scale σ 2 = 1. F or ν = ∞ , the distribution correspond s t o the usual (“Gaussian”) Rayleigh distribution. tionally , this latter implemen tation should b e muc h eas- ier, though. Another difference to note is that while the matched filter allows us to retur n the profile likelihoo d as a function of time (the SNR time series ), only the Studen t- t filter implementation from Sec. A 3 d is able to provide this, while the more efficien t implementation will only return the o verall maximum. 4. The Student-R ayleigh distribution a. R elation to the F distribution The noise p ow er’s proba bility distribution under the Studen t- t mo del (see ( 33 ), Se c . IV C ) may b e r elated to Snedecor’s F distr ibution. First, rea l and imagi- nary parts of the j th element of the discr etely F our ier- transformed v ector n follo w a m ultiv ariate ( bi v ar iate) Studen t- t distribution (see Sec. II I A ). Let A a nd B be independent Gaus sian random v a riables with zer o mean and sta ndard deviation σ . F urthermore , let C be a χ 2 ν distributed random v ariable with ν degrees of free- dom. Then the r andom v ector X Y ! = 1 p C /ν A B ! follows a biv ariate Studen t- t distribution with a diagonal cov ar iance matr ix, exactly lik e the rea l and ima ginary comp onent s of ˜ n ( f j ) [ 8 ]. T he ro ot-mean-sq ua re figur e corres p onding to th e p ower then may b e written as p X 2 + Y 2 = v u u t 2 σ 2 A σ 2 + B σ 2 / 2 C / ν = √ 2 σ 2 D , (A16) where the random v ariable D , being a ratio of χ 2 dis- tributed r andom v aria bles that ar e normalize d by their resp ective degr ees-of-freedom, follows an F (2 , ν ) distri- bution with 2 and ν degrees of freedom [ 7 ]. b. Pr ob abi l ity density function, etc. In the Gaussian noise mo del (see Sec . I I B ), the noise p ow er at the j th frequency bin, ˜ n ( f j ) , follows a Rayleigh distribution with probability densit y function f R ( x | σ ) = x σ 2 exp − x 2 2 σ 2 , (A17) where the scale pa r ameter σ is given as σ = q N 4∆ t S 1 ( f j ). The analogue Student-Ra yleigh probability distribu- tion in the Student - t noise mo del (see Sec. II I A ) is de- fined through its densit y function f SR ( x | σ , ν ) = x σ 2 f F (2 ,ν ) x 2 2 σ 2 , (A18) where f F (2 ,ν ) ( · ) is the pro babilit y densit y function of an F (2 , ν ) distribution with 2 a nd ν degrees of freedom. Similarly , the cum ulative distribution function a nd q uan- tile function are given b y F SR ( x | σ , ν ) = F F (2 ,ν ) x 2 2 σ 2 and (A19) Q SR ( p | σ , ν ) = q 2 σ 2 Q F (2 ,ν ) ( p ) , (A20) where F F (2 ,ν ) ( · ) and Q F (2 ,ν ) ( · ) ar e the F distribution’s cum ulative distribution function and quantile function. Figure 6 illustrates probability densit y functions of Studen t-Rayleigh probability distributions for v arying degrees o f freedom ν . F or ν = ∞ , the distribution cor re- sp onds to t he usual (“Gaussian”) Rayleigh distribution. Note, in pa rticular, the differing tail behavior (analo gous to Fig. 1 ) that is apparen t esp ecially in the logarithmic plot. [1] K . S . Thorne. Gra vitational radiation. In S. W. Haw king and W. Israel, editors, 300 ye ars of gr avitation , c hapter 9, pages 330–358. Cam bridge Universit y Press, Cambridge, 16 1987. [2] B. F. Schutz. Gra vitational w a v e astronom y . Classic al and Quantum Gr avity , 16(12A):A131–A156 , Decemb er 1999. [3] C. R ¨ over, R. Mey er, and N. Christensen. Modelling coloured residual n oise in gra vitational-w a ve signal p ro- cessing. Classic al and Quantum Gr avity , 28(1):015010, Jan uary 2011. [4] G. L. T urin. An introduction to matc hed filters. IRE T r ansactions on I nformation The ory , 6(3):311–329, June 1960. [5] N . Choudhuri, S. Ghosal, and A. Roy . Con tiguit y of the Whittle measure for a Gaussian time series. Biometrika , 91(4):211– 218, 2004. [6] L. S. Finn. Detection, measurement, and gravitational radiation. Physic al R eview D , 46(1 2):5236–5 249, Decem- b er 1992. [7] A . M. Moo d, F. A. Gra yb ill, and D. C. Bo es. Intr o duction to the the ory of statist ics . McGra w-Hill, New Y ork, 3rd edition, 1974. [8] A . Gelman, J. B. Carlin, H. Stern, and D . B. Rubin. Bayesian data analysis . Chapman & H all / C RC, Bo ca Raton, 1997. [9] J. O. Berger. Statist ic al de cision the ory and Bayesian analysis . Springer-V erlag, 2nd edition, 1985. [10] R . Prix an d B. Krishnan. T argeted search for contin- uous gravitational wa ves: Bay esian vers us maximum- lik elihoo d statistics . Classic al and Quantum Gr avi ty , 26(20):204 013, Octob er 2009. [11] A. C. Searle. Monte-Carlo and Bay esian techniques in gra vitational wa ve bu rst data analysis. Arxiv pr eprint 0804.1161 [gr-qc] , April 2008. [12] C. R¨ over, M.-A. Bizouard, N. Christensen, H. D im- melmeier, I. S. Heng, and R. Mey er. Bay esian reconstruc- tion of gra vitational wa ve burst signals from simulatio ns of rotating stellar core collapse and bounce. Phy sic al Re - view D , 80(10):102 004, Nov em b er 2009. [13] K. Cannon, A . Chapman, C. Hanna, D. Kepp el, A. C. Searle, and A. W einstein. Sin gu lar v alue decomposition applied to compact binary coalescence gravitatio nal-wa ve signals. Physic al R eview D , 82(4):04 4025, August 2010. [14] P . Jarano wski, A. Kr´ olak, and B. S c hutz. Data analy- sis of gravitatio nal-w a ve signals from spinning neut ron stars: The signal and its detection. Physic al R eview D , 58(6):0630 01, September 1998. [15] J. Neter, M. H. Ku tner, C. J. Nach tsheim, and W. W asserman. Applie d l ine ar statistic al mo dels . McGra w-Hill, New Y ork, 4th edition, 1996. [16] C. R ¨ over, C. Mess enger, and R. Prix. Ba y esian versus fre- quentist upp er limits. Arxiv pr eprint 1103.2987 , F ebru- ary 2011. [17] B. Allen et al. Observ ational limit on gra vitational wa ves from binary neutron stars in the galaxy . Phy sic al Re view L etters , 83(8):1 498–150 1, August 1999 . [18] B. Allen, W. G. A nderson, P . G. Brady , D . A. Bro wn, and J. D. E. Creigh ton. Findchirp: an algorithm for detection of gravitational wa ves from inspiraling compact b inaries. Ar xiv pr eprint gr-qc/0509116 , Septem b er 2005. [19] D. A. Bro wn. Using t h e Inspiral program to search for gravitational wa ve s from low -mass binary inspiral. Classic al and Quantum Gr avity , 22(18):S10 97–S1107, September 2005. [20] M. W as et al. On the background estimation by time slides in a net w ork of gra vitational w ave detectors. Cl as- sic al and Quantum Gr avity , 27(1):0150 05, Jan uary 2010. [21] W. S. Gosset. The probable error of a mean. Biometrika , 6(1):1–25, March 1908. [22] H. H. Kelejian and I. R. Pruc ha. Ind epend en t or uncor- related disturbances in linear regressio n: An illustration of the d ifference. Ec onomics L etters , 19(1):35–38, 1985. [23] T. S. Breusch, J . C. Rob ertson, and A. H. W elsh. The emp eror’s new clothes: a critique of the multiv ariate t regression mo del. Statistic a Ne erlandic a , 51(3):26 9–286, December 1997. [24] K. L. Lange, R. J. A. Little, and J. M. G T aylor. Ro- bust statistical mo deling using the t distribution. Journal of the Americ an Statistic al Asso ci ation , 84(408): 881–896 , December 1989. [25] J. Gewek e. Ba yesi an treatmen t of t h e indep endent Student- t linear mo del. Journal of Applie d Ec onomet- rics , 8:S19–S40, Decem b er 1993. [26] D. R. Divgi. Robust estimatio n using St u dent’s t distri- bution. CNA Research Memorandum CRM 90-217 , Cen- ter for Na v al Analyses, Alexandria, V A, USA, D ecem ber 1990. [27] J. B. McDonald and W. K. Newey . Partia lly adaptive estimation of regres sion models via the generali zed t dis- tribution. Ec onometric The ory , 4(3):428–4 57, December 1988. [28] F. R. Hamp el, E. M. Ronchetti, P . J. Rousseeuw, and W. A. S tahel. R obust statistics: The appr o ach b ase d on influenc e f unctions . Wiley , New Y ork, 1986. [29] P . J. Hub er and E. M. Ronchetti. R obust stat istics . Wiley , 2nd edition, 2009. [30] J. D. Creigh ton. Data analysis strategies for the detection of gravitational w a ves in non-Gaussian n oise. Physic al R eview D , 60(2):0 21101, July 1999. [31] B. Allen, J. D. E. Creigh ton, ´ E. ´ E. Flanagan, and J. D. Romano. Robust statistics for deterministic and stochas- tic gravitational wa ves in non-Gaussia n nois e: F req uen- tist analyses. Physic al R eview D , 65(12):1220 02, June 2002. [32] B. Allen. χ 2 time-frequency discriminator for gra vita- tional w a v e d etection. Physic al R eview D , 71(6):062001, Marc h 200 5. [33] A. P . Dempster, N. M. Laird, a nd D. B. Rubin. Maxi- mum likel ihoo d from incomplete data via the EM a lgo- rithm. Journal of the R oyal Statistic al So ciety B , 39(1):1– 38, 1977. [34] S. S. Wilks. The l arge-sample distribution of the lik eli- hoo d ratio for testing composite h yp otheses. The A nnals of Mathematic al Statistics , 9(1):60– 62, Marc h 1938. [35] C. R ¨ over. bspec: Ba yes ian sp ectral in fer- ence, v ersion 1.3, 2 011. R p ac k age. U RL: http://cra n.r- project.org /package=bspec . [36] T. M¨ akel¨ ainen, K. Sc hmidt, and G. P . H. Styan. On the existence and uniqueness of the max imum likelihood esti- mate of a vector-v alued parameter in fixed-size samples. The A nnals of Stat istics , 9(4):758 –767, July 1981. [37] T. Damour, B. R. Iy er, and B. S. Sathy aprak ash. Com- parison of search templates for gra vitational w a v es from binary inspiral. Phys ic al R eview D , 63(4):0440 23, Jan- uary 2001. [38] B. P . Ab bott et al. LIGO: t he Laser Interferometer Gra vitational-w a v e Observ atory . R ep orts on Pr o gr ess in Physics , 72(7):076901, July 2009. [39] P . D. W elch. The use of Fast Fourier T ransform for the 17 estimation of p ow er sp ectra: A method based on time a v- eraging ov er short, mod ified perio dograms. IEEE T r ans- actions on A udi o a nd Ele ctr o ac oustics , AU-15(2):70–73, June 1967. [40] T. T anak a an d H. T agoshi. Use of n ew co ordinates for the template space in a hierarc hical searc h for gravita- tional w a ves from inspiraling binaries. Physic al R eview D , 62(8):0820 01, Octob er 2000. [41] M. B. Wilk and R. Gnanadesik an. Probability plotting metho d s for the analysis of data. Bi ometrika , 55(1):1 –17, Marc h 1968. [42] T. F aw cett. An introdu ction to R O C analysis. Patt ern R e c o gniti on L etters , 27(8):861–87 4, June 2006. [43] S. W aldman. Rayleig h distributions for H1, L1 for S6a. LIGO-V irgo collab oration in tern al rep ort, N ovem- b er 2009. [44] C. R ¨ over. Degrees-of-freedom estimation in the Student- t noise mo del. T ec hnical Rep ort LIGO - T1100 497, LIGO- Virgo collab oration, S eptember 2011. [45] J. Slutsky et al. Method s for reducing false alarms in searc hes for compact binary coal escences in LIGO data. Classic al and Quantum Gr avity , 27(16):16 5023, August 2010. [46] J. V eitch and A. V ecchio. Ba ye sian approach to the follo w-u p of candidate gra v itational w a ve signals. Physi- c al R eview D , 78(2):02200 1, July 2008.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment