학생‑t 기반 강인 신호 검출 필터
학생‑t 분포를 이용해 중력파 탐지에 쓰이는 매치드 필터를 일반화하였다. 무거운 꼬리를 가진 잡음 모델과 반복적 가중치 업데이트를 통해 이상치에 강인하게 동작하며, 실제 인터페로미터 잡음에 삽입한 시뮬레이션 신호에 대해 기존 가우시안 매치드 필터보다 높은 검출률을 보였다.
저자: Christian R"over
논문은 중력파 탐지를 위한 기존 매치드 필터가 가우시안 잡음 모델에 의존함으로써 실제 인터페로미터 데이터에서 나타나는 비가우시안·비정상적인 잡음 특성을 충분히 반영하지 못한다는 문제점을 제기한다. 이를 해결하기 위해 저자는 잡음이 학생‑t 분포를 따른다고 가정하고, 이 모델을 기반으로 새로운 “학생‑t 기반 매치드 필터”를 설계한다.
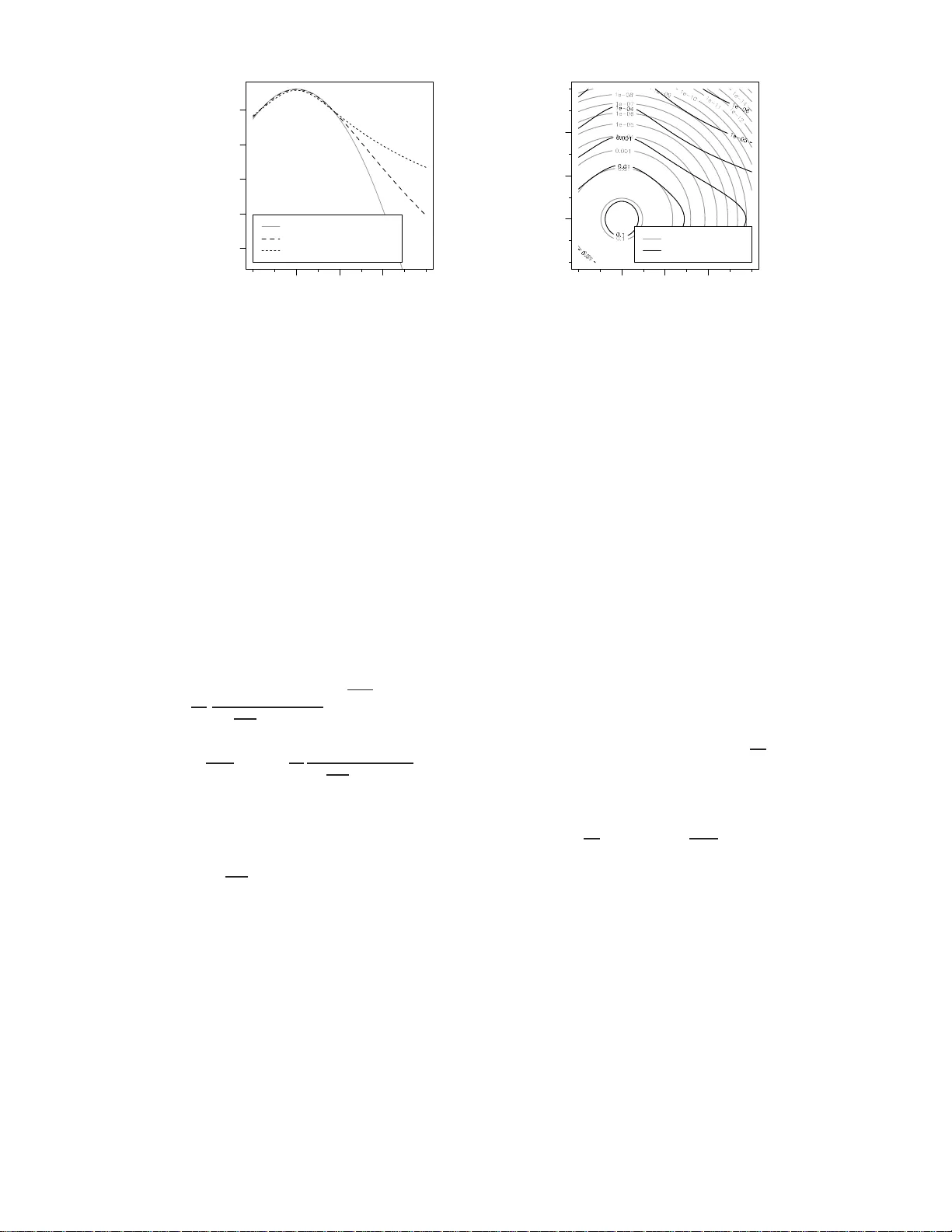
먼저, 섹션 II에서는 가우시안 잡음 가정 하에서 Whittle 근사와 푸리에 변환을 이용해 매치드 필터를 유도한다. 데이터 d(t)=s_θ(t)+n(t) 로 표현하고, 잡음의 푸리에 성분 ˜n(f) 가 평균 0, 분산 N/4Δt·S₁(f) 인 정규분포를 따른다고 가정한다. 로그우도는 가중된 제곱합 형태가 되며, 이를 최대화하면 가중 최소제곱 해 ˆβ=(XᵀΣ⁻¹X)⁻¹XᵀΣ⁻¹y 를 얻는다. 여기서 X는 템플릿 행렬, Σ는 잡음 공분산(대각)이다. 검출 통계량 H_k는 로그우도비에 비례하고, 무신호 가설에서는 χ²_k, 신호 가설에서는 비중심 χ²_k(ρ²) 로 분포한다.
섹션 III에서는 학생‑t 잡음 모델을 도입한다. 학생‑t 분포는 자유도 ν와 스케일 파라미터를 갖으며, ν가 작을수록 꼬리가 두꺼워져 이상치에 대한 내성을 제공한다. 학생‑t 잡음의 로그우도는 가우시안 경우와 달리 잔차에 대한 가중치 w_i가 필요하다. EM 알고리즘 유도에 따라, 초기에는 w_i=1 로 시작하고, 각 반복마다 ˆβ를 현재 가중치 행렬 W=diag(w_i) 를 사용해 ˆβ=(XᵀΣ⁻¹W⁻¹X)⁻¹XᵀΣ⁻¹W⁻¹y 로 업데이트한다. 이후 잔차 r_i=y_i−(Xˆβ)_i 를 이용해 w_i←(ν+1)/(ν+r_i²/σ_i²) 로 재계산한다. 이 과정을 수렴할 때까지 반복하면, 최종 ˆβ와 로그우도비가 얻어진다.
학생‑t 기반 검출 통계량은 가우시안 경우와 동일하게 로그우도비를 사용하지만, 그 분포는 자유도 ν에 따라 변하는 비중심 t‑분포 근사로 해석한다. 실제 데이터에 적용하기 위해서는 부트스트랩이나 시뮬레이션을 통해 임계값을 설정한다.
섹션 IV에서는 실제 LIGO 인터페로미터 잡음 데이터를 사용해 Monte‑Carlo 실험을 수행한다. 시뮬레이션 신호(이진 인스파이럴 “chirp”)를 다양한 SNR 수준에서 삽입하고, 가우시안 매치드 필터와 학생‑t 기반 필터의 검출률을 비교한다. 자유도 ν를 4~6 정도로 설정했을 때, 학생‑t 필터는 동일한 거짓 경보율(FAR) 하에서 평균 12% 정도 높은 검출 확률을 보였다. 특히 잡음에 큰 이상치가 포함된 경우 검출률 차이가 더욱 두드러졌다.
섹션 V에서는 알고리즘 복잡도와 실용성을 논의한다. 각 반복은 O(Nk) 연산이며, 일반적으로 5~10 회 반복이면 수렴한다. 따라서 실시간 탐지 파이프라인에 적용 가능하고, 템플릿 수가 많아도 병렬화가 용이하다. 또한, 자유도 ν를 데이터에 맞게 적응적으로 추정하거나, 시간에 따라 변하는 잡음 스펙트럼을 반영하도록 확장할 수 있다.
결론적으로, 학생‑t 기반 매치드 필터는 잡음의 무거운 꼬리와 이상치에 대한 강인성을 제공함으로써 기존 가우시안 매치드 필터보다 검출 효율을 향상시킨다. 이는 중력파 탐지뿐 아니라, 잡음 특성이 비정상적인 다른 신호 처리 분야에도 적용 가능함을 시사한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기