Consensus of Discrete-Time Linear Multi-Agent Systems with Observer-Type Protocols
This paper concerns the consensus of discrete-time multi-agent systems with linear or linearized dynamics. An observer-type protocol based on the relative outputs of neighboring agents is proposed. The consensus of such a multi-agent system with a di…
Authors: Zhongkui Li, Zhisheng Duan, Guanrong Chen
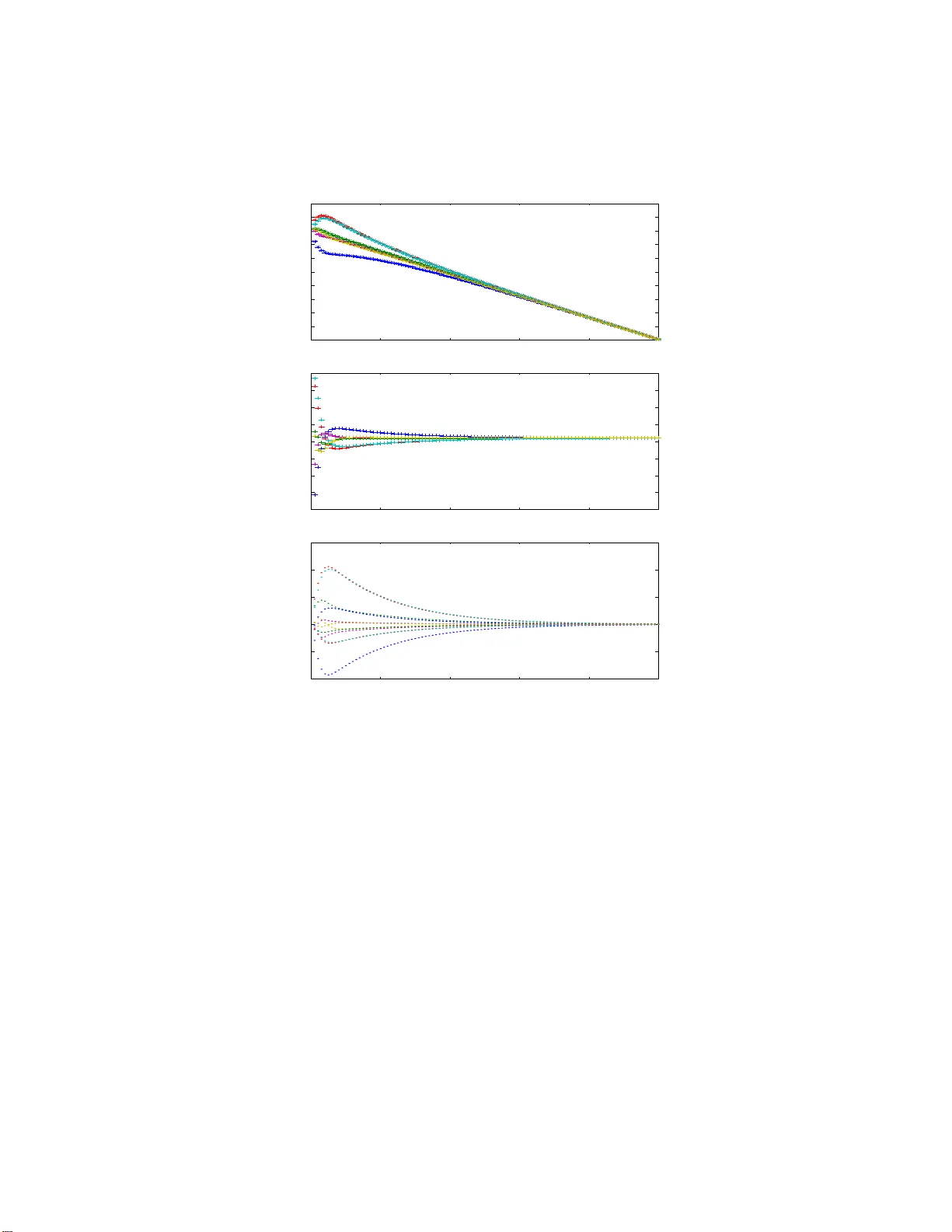
Manuscript submitted to W ebsite: http://AIMsciences.org AIMS’ Journals V olume X , Number 0X , XX 2 00X pp. X–XX CONSENSUS OF DISCRETE-TIME LINEAR MUL TI-A GENT SYSTEMS WITH OBSER VER-TYPE PR O TOCOLS Zhongkui Li Sc hool of Automation, Beijing Institute of T ec hnology Beijing 100081, P . R. Chi na Zhisheng Duan State Key Lab for T urbulence and Complex Systems Departmen t of Mechan ics and Aerospace Engineering, College of Engineering Pe king Universit y , Beijing 100871, P . R. Chi na Guanrong Chen Departmen t of Electronic Engineering City Universit y of Hong Kong, Hong Kong, P . R. China (Dedicated to Pro fessor Qisha o Lu with res p ect and admiration) Abstract. This paper concerns the consensus of di screte-time multi-agen t systems w i th linear or linearized dynamics. An observ er-type pr otocol based on the relative outputs of neighboring agen ts is proposed. The consensus of suc h a multi-agen t system with a dir ected commun ication top ology can b e cast int o the stability of a set of matrices with the same low dim ension as that of a single agen t. The notion of di s crete-time consensus region i s then i ntroduced and analyzed. F or neurall y stable agen ts, it is shown that there exists an observ er-type proto col ha ving a bounded consensus region in the f orm of an open unit disk, pr o vided that each agen t is stabilizable and detectable. An algorithm i s further pr esen ted to construct a protocol to achiev e consensus with respect to all the comm unication topologies con taining a spanning tree. Moreov er, for unstable agen ts, an algorithm is prop osed to construct a protocol ha ving an origin-cente red di s k of radius δ (0 < δ < 1) as i ts consensus r egion, where δ has to further satisfy a const raint related to the unst able eigenv alues of a single agent f or the case where each agent has a least one eigen v alue outside the unit circle. Finally , the consensus algorithms are applied to solve formation con tr ol problems of multi-agen t systems. 1. In tro duction. In recent years, the consensus issue of multi-agent sys tems has received comp elling a tten tion from v a rious scientific co mm unities, for its broad ap- plications in such broa d areas as s atellite for mation flying , co op erative unmanned air vehicles, and air traffic control, to name just a few. In [ 43 ], a s imple mo del is pro po sed for phase trans ition of a gr oup of self-driven par ticles with numerical demonstration of the co mplexity of the mo del. In [ 11 ], it provides a theoretical explanation for the behavior observed in [ 43 ] by using graph theory . In [ 2 2 ], a 2000 Mathematics Subje ct Classific ation. Primary: 93A14, 93C55; Secondary: 93C05. Key wor ds and phr ases. Consensus, multi-agen t system, discrete-time linear system, observe r- t ype pr otocol, consensus region, formation cont rol. This work was supp orted by the National Science F oundation of China under Grant s 60974078 and 10832006 . 1 2 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN general framework of the co nsensus problem for net works of dynamic a gents with fixed or switching top ologies is addr essed. The co nditio ns given by [ 22 ] are fur- ther relaxed in [ 26 ]. In [ 8 ] and [ 9 ], tracking co ntrol for mult i-agent co nsensus with an active leader is considered, where a lo ca l controller is desig ned together with a neighbor-ba sed state-estimation rule. Some predictive mechanisms are introduced in [ 47 ] to achiev e ultrafa s t consensus . In [ 14 , 17 ], the H ∞ consensus and control problems for netw ork s of agents with external disturbances and mo del unce r tain- ties are inv estigated. The co nsensus problems of ne tw orks of double-integrator or high-order in tegrator agents are studied in [ 18 , 2 8 , 29 , 3 6 , 4 0 , 45 ]. A distr ibuted algorithm is prop os ed in [ 3 ] to asymptotica lly achiev e consens us in finite time. The so-called ǫ - consensus problem is considered in [ 1 ] for net works of dynamic agents with unknown but bounded disturbances. The av erage agr eement pro blem is ex - amined in [ 7 ] for a netw o rk o f integrators with quant ized links. The con trolled agreement problem o f m ulti-agent netw ork s is inv es tigated fr om a g raph-theor etic per sp ective in [ 31 ]. Flocking algorithms are inv estigated in [ 23 , 38 , 39 ] for a group of autonomous agents. A nother topic that is closely related to the consensus of m ulti-agent sys tems is the synchronization of coupled nonlinear osc illa tors, which has b een extensively studied, e.g., in [ 2 , 4 , 5 , 19 , 25 , 46 ]. F o r a r elatively complete cov er age of the literature s o n consensus, r e aders are referr ed to the rec ent surveys [ 24 , 2 7 ]. In most existing studies o n co nsensus, the agent dy namics are res tr icted to be first-, s e c ond-, and sometimes hig h-order integrators, and the pro po sed consens us proto cols are based on the r e la tive states b e tween neighboring agents. This pap er consider s the consensus of discre te-time linea r mult i-agent sys tems with directed commun ication top ologie s. Previous studies along this line include [ 15 , 16 , 20 , 32 , 34 , 41 , 42 , 44 ]. In [ 20 , 41 , 42 , 44 ], static co nsensus proto cols based on r elative s tates of neig hboring age nts a r e used. The discrete- time pro to c ol in [ 32 ] requires the abso lute output mea surement of each agent to be av ailable, which is impractical in many cases , e.g., the deep-space forma tion flying [ 3 7 ]. Con trary to the proto col in [ 32 ], an obser ver-type cons ensus proto co l is prop osed here, based only on rela tive output measurements o f neighboring a gents, w hich contains the static consensus pr oto col develop e d in [ 4 1 ] as a sp ecial ca se. The observer-type proto col prop ose d her e can b e seen a s an extension of the tr aditional obser ver-based controller for a single sy s tem to one for the m ulti-agent sys tems. The Separ ation Principle of the traditio na l observer-based controllers s till ho lds in the mu lti-agent setting pr esented in this pap er. More precisely , a dec o mpo sition approach is utilized here to c onv er t the cons ensus of a multi-agen t system, whose communication top olog y has a spanning tree, into the stability of a set of matrices with the same dimension as a single agent. The final consensus v alue re a ched by the agents is derived. Inspir e d by the notion of contin uous-time co nsensus r egion introduced in [ 15 ] a nd the synchronized reg ions of complex netw orks studied in [ 4 , 19 , 2 5 ], the notion of discrete-time c onsensus region is intro duced and analyzed. It is p ointed out through numerical examples that the consensus proto col should hav e a reasona bly la r ge bounded co nsensus region so as to b e ro bust to v ariations of the communication top olo gy . F or the sp ecial case wher e the state matr ix is neutra lly s ta ble, it is shown that there ex is ts an o bserver-type proto col with a b ounded consens us regio n in the form of an ope n unit disk, if each agent is stabilizable and detectable. An algo rithm is further presented to co nstruct a pro to col to achieve co nsensus with r esp ect to all the communication topo logies containing a spanning tree. T he main result in [ 41 ] can be thereby eas ily o bta ined CONSENSUS OF DISCRETE-TIME LINE AR MUL TI-A GENT SYSTE M S 3 as a coro llary . On the co ntrary , for the genera l case where the state matrix is unstable, an alg orithm is pr op osed to cons tr uct a proto col with the origin-centered disk o f r adius δ (0 < δ < 1 ) as its consensus region. It is p ointed out that δ has to further satisfy a constraint relying on the unstable eig env alues of the sta te matrix for the ca s e wher e each ag ent has a leas t one eige nv alue o utside the unit circle, which shows that the consensus pr oblem of the discrete-time multi-agen t s y stems is generally more difficult to s olve, compared to the contin uo us-time case in [ 15 , 16 ]. In the final, the conse ns us algor ithms are mo dified to solve formation control problems of multi-agent systems. Pr evious related works include [ 6 , 13 , 30 ]. In [ 6 ], a Nyquist-type criterion is presented to analyze the formatio n stability . The agent dynamics in [ 13 , 30 ] are se c ond-order integrators. In this pap er, a sufficient condition is given for the existence of a distributed proto col to achiev e a sp ecified formation str ucture for the multi-agent network, which g eneralizes the res ults in [ 13 , 30 ]. Suc h a pr oto col ca n b e constructed via the algo rithms prop o sed as a bove. The re s t of this pap er is organized as follo ws. No tations and some useful r esults of the gra ph theor y is reviewed in Section 2. The notion o f discrete-time cons ensus region is introduced and analy zed in Section 3. The sp ecial case where the s tate matrix is neutrally s ta ble is consider ed in Sectio n 4. The case where the state matrix is unstable is inv estigated in Section 5. The consens us algorithms are applied to formation control of multi-agen t systems in Section 6. Sec tion 7 c oncludes the pap er. 2. Notations and Prelimi naries. Let R n × n and C n × n be the sets of n × n re al matrices and complex matrice s , r esp ectively . Matrices, if not explicitly stated, hav e compatible dimensions in all settings. The sup erscript T means transp ose for real matrices and H m eans conjugate transp ose for complex matric e s . k · k denotes the induced 2-norm. I N represents the identit y matrix of dimension N , and I the ident ity matr ix of an appropr iate dimension. Let 1 ∈ R p denote the vector with all entries eq ual to one. F o r ζ ∈ C , Re( ζ ) denotes its re a l par t. A ⊗ B de no tes the Kronecker pro duct of matrices A and B . The matr ix inequality A > B means that A a nd B ar e sq uare Hermitian matrices and A − B is p os itive definite. A matrix A ∈ C n × n is neutra lly sta ble in the disc rete-time s ense if it has no eigenv alue with magnitude larg er than 1 and the Jor dan blo ck cor resp onding to any eigenv alue with unit mag nitude is of size one, while is Sch ur stable if all of its eigenv alues have magnitude less tha n 1. A matrix Q ∈ R n × n is o r thogonal if QQ T = Q T Q = I . Matrix P ∈ R n × n is a n o rthogona l pr o jection o nt o the s ubspace range( P ) if P 2 = P and P T = P . Moreov er, ra nge( A ) denotes the column space of matrix A , i.e, the span o f its column vectors. A dir e cted g raph G is a pair ( V , E ), where V is a nonempty finite set o f no des and E ⊂ V × V is a set o f edges, in whic h an edge is represented by a n ordered pair of distinct no des. F or a n edge ( i, j ), no de i is ca lled the pa rent no de, j the child no de, and j is neighboring to i . A gra ph with the prop erty that ( i, j ) ∈ E implies ( j, i ) ∈ E is s aid to b e undirected; other wise, directed. A path on G from no de i 1 to no de i l is a sequence of orde r ed edges of the for m ( i k , i k +1 ), k = 1 , · · · , l − 1 . A directed graph ha s o r contains a directed s panning tree if there exists a no de called ro ot such that there exists a dir ected path from this no de to every other no de in the graph. F o r a gr aph G with m no des, the row-sto chastic matrix D ∈ R m × m is defined with d ii > 0, d ij > 0 if ( j, i ) ∈ E but 0 otherwise, and P m j =1 d ij = 1. Accor ding to 4 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN [ 26 ], all o f the eigenv alues o f D are either in the o pen unit disk or equa l to 1 , and furthermore, 1 is a simple eigenv alue of D if and only if gr aph G contains a dir ected spanning tree. F o r a n undirected gra ph, D is s ymmetric. Let Γ m denote the set of a ll direc ted graphs with m no des such that each gra ph contains a dir ected spa nning tree, and le t Γ ≤ δ (0 < δ < 1 ) denote the set of all directed graphs containing a directed s pa nning tree, whose non-one eigenv alues lie in the disk of r a dius δ ce ntered a t the origin. 2.1. Pr oblem F ormulation. Co nsider a netw o rk of N identical a g ent with linear or linearized dyna mics in the discre te-time setting, whe r e the dy na mics of the i - th agent ar e desc rib ed by x + i = Ax i + B u i , y i = C x i , i = 1 , 2 , · · · , N , (1) where x i = x i ( k ) = [ x i, 1 , · · · , x i,n ] ∈ R n × n is the sta te, x + i = x i ( k + 1) is the sta te at the nex t time instant, u i ∈ R p is the co ntrol input, y i ∈ R q is the measured output, and A , B , C are constant matrices with compatible dimensions. The c ommunication topo logy amo ng ag ents is r epresented b y a directed graph G = ( V , E ), where V = { 1 , · · · , N } is the s e t of no des (i.e., ag ent s) and E ⊂ V × V is the set of edg es. An edge ( i, j ) in graph G means that a gent j can obtain infor mation from a gent i , but not conv er sely . A t each time instant, the information av ailable to ag ent i is the relative mea- surements of other agents with resp ect to itself, given by ζ i = N X j =1 d ij ( y i − y j ) , (2) where D = ( d ii ) N × N is the row-stochastic matrix asso ciated with g raph G . A distributed observer-type co nsensus pro to col is prop os e d as v + i = ( A + B K ) v i + L N X j =1 d ij C ( v i − v j ) − ζ i , u i = K v i , (3) where v i ∈ R n is the pro to col state, i = 1 , · · · , N , L ∈ R q × n and K ∈ R p × n are feedback gain matrices to b e determined. In ( 3 ), the term P N j =1 d ij C ( v i − v j ) denotes the infor ma tion exchanges b etw e e n the pr oto col of ag ent i a nd tho s e of its neighbor ing a g ents. It is observed that the proto c o l ( 3 ) main tains the same communication top olo gy as the agents in ( 1 ). Let z i = [ x T i , v T i ] T and z = [ z T 1 , · · · , z T N ] T . Then, the closed-lo op system r esulting from ( 1 ) and ( 3 ) can be written as z + = ( I N ⊗ A + ( I N − D ) ⊗ H ) z , (4) where A = A B K 0 A + B K , H = 0 0 − LC LC . Definition 2.1. Given agents ( 1 ), the proto col ( 3 ) is said to solve the consensus problem if k x i ( k ) − x j ( k ) k → 0 , as k → ∞ , ∀ i, j = 1 , 2 , · · · , N . (5) CONSENSUS OF DISCRETE-TIME LINE AR MUL TI-A GENT SYSTE M S 5 The following presents a decomp osition a pproach to the conse ns us problem o f net work ( 4 ). Theorem 2. 2. F or any G ∈ Γ N , t he agents in ( 1 ) r e ach c onsensus u nder pr oto c ol ( 3 ) if al l the matric es A + B K , A + (1 − λ i ) LC , i = 2 , · · · , N , ar e Schur stable, wher e λ i , i = 2 , · · · , N , denote t he eigenvalues of D lo c ate d in the op en unit disk. Pr o of. F or any G ∈ Γ N , it is known that 0 is a simple eigenv alue of I N − D and the other eigen v alues lie in the op en unit disk cen tered a t 1 + i0 in the complex plane, where i = √ − 1. Let r T ∈ R 1 × N be the left eigenv ecto r o f I N − D asso ciated with the eigen v alue 0, satisfying r T 1 = 1. Introduce ξ ∈ R 2 N n × 2 N n by ξ ( t ) = z ( t ) − ( 1 r T ) ⊗ I 2 n z ( t ) = ( I N − 1 r T ) ⊗ I 2 n z ( t ) , (6) which satisfies ( r T ⊗ I 2 n ) ξ = 0 . It is ea sy to see that 0 is a simple eigenv alue of I N − 1 r T with 1 as its rig ht eigenv ector, a nd 1 is another eig env alue with mult iplicity N − 1. Th us, it follows from ( 6 ) that ξ = 0 if and only if z 1 = z 2 = · · · = z N , i.e., the consensus problem ca n b e cast into the Sch ur sta bilit y of vector ξ , which evolves according to the following dyna mics: ξ + = ( I N ⊗ A + ( I − D ) ⊗ H ) ξ . (7) Next, let Y ∈ R N × ( N − 1) , W ∈ R ( N − 1) × N , T ∈ R N × N , and upp er-triang ular ∆ ∈ R ( N − 1) × ( N − 1) be such that T = 1 Y , T − 1 = r T W , T − 1 ( I N − D ) T = J = 0 0 0 ∆ , (8) where the diagonal entries of ∆ are the nonzero e igenv alues o f I N − D . Introduce the state transfor mation ζ = ( T − 1 ⊗ I 2 n ) ξ with ζ = [ ζ T 1 , · · · , ζ T N ] T . Then, ( 7 ) ca n be repr esented in terms of ζ a s follows: ζ + = ( I N ⊗ A + J ⊗ H ) ζ . (9) As to ζ 1 , it can b e seen from ( 6 ) that ζ 1 = ( r T ⊗ I 2 n ) ξ ≡ 0 . (10) Note that the ele men ts of the state matrix of ( 9 ) are either blo c k diagonal or blo ck upper -triangula r. Hence, ζ i , i = 2 , · · · , N , conv e r ge asymptotically to zero if and only if the N − 1 subsystems along the diag onal, i.e., ζ + i = ( A + (1 − λ i ) H ) ζ i , i = 2 , · · · , N , (11) are Sch ur sta ble. It is ea sy to verify that matrices A + λ i H are simila r to A + (1 − λ i ) LC 0 − (1 − λ i ) LC A + B K , i = 2 , · · · , N . Therefore, the Sch ur stability of the matr ices A + B K , A + (1 − λ i ) LC , i = 2 , · · · , N , is equiv alent to that the s tate ζ o f ( 7 ) conv er ges as ymptotically to zero, implying that cons e nsus is achieved. Remark 1. The imp orta nce of this theore m lies in tha t it conv er ts the co nsensus problem of a lar g e-scale therefore very high-dimensio nal mult i-agent netw ork under the o bserver-type proto col ( 3 ) to the stability o f a se t o f matrices with the same dimension as a single a gent, ther eby significa nt ly reducing the computational com- plexity . The directed communication top o logy G is only assumed to have a directed 6 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN spanning tree. The effects of the communication top ology on the consens us pro blem are characterized by the eigenv alues of the corr esp onding row-sto chastic matrix D , which may b e complex, rendering the ma tr ices b e complex-v alued in Theorem 2.2 . Remark 2. The observer-type co nsensus pro to col ( 3 ) ca n b e seen as an extensio n of the traditional obser ver-based controller for a single system to o ne for multi-agen t systems. The Separation Principle of the traditio na l observer-based controllers still holds in this multi-agent setting. Moreov er, the pr oto col ( 3 ) is based only on relative output mea surements betw ee n neighbor ing agents, which can be r egarded as the discrete-time count erpart of the proto col prop osed in [ 15 , 1 6 ], including the static pr oto col used in [ 41 ] as a sp ecial case. Theorem 2 . 3. Consider the mult i-agent network ( 4 ) with a c ommunic ation top ol- o gy G ∈ Γ N . If pr oto c ol ( 3 ) satisfies The or em 2.2 , then x i ( k ) → ( k ) , ( r T ⊗ A k ) x 1 (0) . . . x N (0) , v i ( k ) → 0 , i = 1 , 2 , · · · , N , as k → ∞ , (12) wher e r ∈ R N satisfies r T ( I N − D ) = 0 and r T 1 = 1 . Pr o of. The solution of ( 4 ) can b e obtained as z ( k + 1) = ( I N ⊗ A + ( I N − D ) ⊗ H ) k z (0) = ( T ⊗ I )( I N ⊗ A + J ⊗ H ) k ( T − 1 ⊗ I ) z (0) = ( T ⊗ I ) A k 0 0 ( I N − 1 ⊗ A + ∆ ⊗ H ) k ( T − 1 ⊗ I ) z (0) , where matrices T , J and ∆ are defined in ( 8 ). By Theor em 2.2 , I N − 1 ⊗ A + ∆ ⊗ H is Sch ur s table. Thus, z ( k + 1) → ( 1 ⊗ I ) A k ( r T ⊗ I ) z (0) = ( 1 r T ) ⊗ A k z (0) , a s k → ∞ , implying that z i ( k ) → ( r T ⊗ A k ) z (0 ) , a s k → ∞ , i = 1 , · · · , N . (13) Since A + B K is Sc hur stable, ( 13 ) dir ectly leads to the assertion. Remark 3. Some o bserv ations on the final co nsensus v alue in ( 12 ) can b e concluded as follows: If A is Sch ur stable, then ( k ) → 0, as k → ∞ . If A in ( 1 ) has eigenv alues lo cated o utside the op en unit circ le , then the co nsensus v alue ( k ) rea ched by the agents will tend to infinity exp onentially . On the other hand, if A has eigenv alues in the clo sed unit circle, then the a gents in ( 1 ) may reach consensus nontrivially . Tha t is, some sta tes of each agent might appro ach a common no nzero v alue. Typical examples b elo nging to the la st c ase include the co mmonly-studied first-, seco nd-, and high- order integrator s. CONSENSUS OF DISCRETE-TIME LINE AR MUL TI-A GENT SYSTE M S 7 3. Discrete-Time Consensus R egions. F ro m Theor em ( 2.2 ), it can b e noticed that the cons ensus o f the given a g ents ( 1 ) under proto col ( 3 ) dep ends on the feed- back gain ma trices K , L , and the eigenv alues λ i of matrix D asso c iated with the communication gr aph G , where matrix L is coupled with λ i , i = 2 , · · · , N . Hence, it is useful to analyze the cor related effects of matrix L and graph G on co ns ensus. T o this end, the notio n of consensus region is introduced. Definition 2 . Assume tha t matrix K has b een designed such that A + B K is Sch ur stable. The r egion S of the par ameter σ ⊂ C , such that matrix A + (1 − σ ) LC is Sch ur sta ble , is called the (disc r ete-time) co nsensus region of netw or k ( 4 ). The notion of discr ete-time consensus region is inspired by the co ntin uous-time consensus region introduce d in [ 15 ] a nd the synchronized r egions of complex net- works s tudied in [ 4 , 19 , 25 ]. The following result is a dir ect conseq uence of Theor e m 2.2 . Corollary 1. The agents in ( 1 ) re ach c onsensus u n der pr oto c ol ( 3 ) if λ i ∈ S , i = 2 , · · · , N , wher e λ i , i = 2 , · · · , N , ar e the eigenvalues of D lo c ate d in the op en unit disk. F o r a n undirected co mm unication g raph, the c onsensus reg ion of net work ( 4 ) is a bo unded interv al or a union of several interv als on the real a xis. How ever, for a direc ted gr aph where the e igenv alues of D are generally co mplex num b ers, the consensus r egion S is either a bo unded region o r a set of several disconnected r egions in the complex plane. Due to the fac t that the eigenv alues o f the row-sto chastic matrix D lie in the unit disk, unbounded co nsensus r e g ions, desir able for consensus in the contin uous-time setting [ 15 , 16 ], generally do not exist for the dis crete-time consensus co nsidered here. The following example has a dis connected co nsensus region. Example 1 . The agent dynamics and the consensus pro to c ol are given by ( 1 ) and ( 3 ), r e sp ectively , with A = 0 1 − 1 1 . 02 , B = 1 0 , C = 1 0 0 1 , L = 0 − 1 1 0 , K = − 0 . 5 − 0 . 5 . Clearly , matr ix A + B K with K given as ab ove is Schur stable. F or simplicity in illustration, assume that the co mm unication gr aph G is undirected here. Then, the consensus r egion is a s et of interv als o n the real axis. The characteristic equa tion of A + (1 − σ ) LC is det( z I − A − σ LC ) = z 2 − 1 . 02 z + σ 2 = 0 . (14) Applying bilinear transfor mation z = s +1 s − 1 to ( 14 ) g ives ( σ 2 − 0 . 02) s 2 + (1 − σ 2 ) s + 2 . 02 + σ 2 = 0 . (15) It is well known that, under the bilinear tra nsformation, ( 14 ) has all ro o ts within the unit disk if and only if the ro ots of ( 15 ) lie in the o p en left-half plane (LHP). According to the Hurwitz criterion [ 21 ], ( 15 ) ha s all ro ots in the op en LHP if and o nly if 0 . 02 < σ 2 < 1. Therefore, the consens us region in this ca se is S = 8 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN ( − 1 , − 0 . 1 414) ∪ (0 . 14 14 , 1), a union of t wo disconnec ted int erv als. F or the commu- nication g raph shown in Figure 1, the corr esp onding row-sto chastic matr ix is D = 0 . 3 0 . 2 0 . 2 0 . 2 0 0 . 1 0 . 2 0 . 6 0 . 2 0 0 0 0 . 2 0 . 2 0 . 6 0 0 0 0 . 2 0 0 0 . 4 0 . 4 0 0 0 0 0 . 4 0 . 2 0 . 4 0 . 1 0 0 0 0 . 4 0 . 5 , whose eigenv alues, other than 1, are − 0 . 2935 , 0 . 164 , 0 . 4 , 0 . 4624 , 0 . 868, which all be- long to S . Th us, it follows from Co r ollary 1 that network ( 4 ) with graph given in Figure 1 can achiev e c onsensus. 1 6 2 5 3 4 Figure 1. The communication top olo gy . Let’s see how mo difications of the communication top olo gy affect the c o nsensus. Consider the following tw o simple cases: 1) An edge is added be t ween no des 1 a nd 5 , thus mor e informa tion exchange will exist inside the netw or k. Then, the row-stochastic matrix D b ecomes 0 . 2 0 . 2 0 . 2 0 . 2 0 . 1 0 . 1 0 . 2 0 . 6 0 . 2 0 0 0 0 . 2 0 . 2 0 . 6 0 0 0 0 . 2 0 0 0 . 4 0 . 4 0 0 . 1 0 0 0 . 4 0 . 2 0 . 3 0 . 1 0 0 0 0 . 4 0 . 5 , whose eigen v alues, in addition to 1, are − 0 . 2346 , 0 . 0352 , 0 . 4 , 0 . 4634 , 0 . 836. Cle arly , the eigenv alue 0 . 0352 do es not belo ng to S , i.e., consens us can not b e achieved in this cas e. 2) The edge b e tween no des 5 and 6 is removed. The row-sto chastic matr ix D bec omes 0 . 3 0 . 2 0 . 2 0 . 2 0 0 . 1 0 . 2 0 . 6 0 . 2 0 0 0 0 . 2 0 . 2 0 . 6 0 0 0 0 . 2 0 0 0 . 4 0 . 4 0 0 . 1 0 0 0 . 4 0 . 6 0 0 . 1 0 0 0 0 0 . 9 , CONSENSUS OF DISCRETE-TIME LINE AR MUL TI-A GENT SYSTE M S 9 whose eigenv alues, o ther than 1, a r e − 0 . 031 5 , 0 . 25 8 7 , 0 . 4 , 0 . 8676 , 0 . 9052. In this case, the eig env alue − 0 . 0315 do es not b elong to S , i.e., cons ensus can no t be achiev ed either. These sample cases imply that, for disconnected consensus reg ions, c onsensus can be quite fragile to the v ariations of the netw or k’s communication top olo gy . Hence, the c onsensus proto col should b e designed to have a sufficiently lar ge b ounded consensus reg ion in order to b e robust with r esp ect to the communication to po logy . This is the topic o f the following sections. 4. Net work s wi th Neurally Stable Agen ts. In this section, a sp ecial cas e where matrix A is neutrally stable is considere d. First, the following lemma is needed. Lemma 4. 1 ([ 48 ]) . F or matrix Q = Q H ∈ C n × n , c onsider the fol lowing Lyapunov e quation: A H X A − X + Q = 0 . If X > 0 , Q ≥ 0 , and ( Q , V ) is observable, then matrix A is Schur stable . Prop ositi o n 1. F or matric es Q ∈ R n × n , V ∈ R m × n , σ ∈ C , wher e Q is ortho go- nal, V V T = I , and ( Q , V ) is observable, if | σ | < 1 , t hen the matrix Q − (1 − σ ) QV T V is Schur st able. Pr o of. Obser ve that ( Q − (1 − σ ) QV T V ) H ( Q − (1 − σ ) QV T V ) − I = Q T Q − (1 − σ ) Q T QV T V − (1 − ¯ σ ) V T V Q T Q + | 1 − σ | 2 V T V Q T QV T V − I = ( − 2 Re (1 − σ ) + | 1 − σ | 2 ) V T V = ( | σ | 2 − 1) V T V . (16) Since ( Q, V ) is o bserv able, it is easy to verify that ( Q − (1 − σ ) QV T V , V T V ) is also o bserv able. Then, by Lemma 4.1 , ( 16 ) implies that Q − (1 − σ ) QV T V is Sch ur stable fo r any | σ | < 1. Next, an a lgorithm for proto co l ( 3 ) is pres ent ed, which will b e used later. Algorithm 1 . Given that A is neutrally stable a nd that ( A, B , C ) is stabiliza ble and detectable , the proto col ( 3 ) ca n b e constructed as follows: 1) Select K b e such that A + B K is Sch ur stable. 2) Choo se U ∈ R n × n 1 and W ∈ R n × ( n − n 1 ) , satisfying 1 U W − 1 A U W = M 0 0 X , (17) where M ∈ R n 1 × n 1 is o r thogonal and X ∈ R ( n − n 1 ) × ( n − n 1 ) is Sch ur s table. 3) Choo se V ∈ R m × n 1 such tha t V V T = I m and range( V T ) = r ange( U T C T ). 4) Define L = − U M V T ( C U V T ) − 1 . Theorem 4. 2. Supp ose that matrix A is neu t r al ly stable and that ( A, B , C ) is stabilizable and dete ctable. The pr oto c ol ( 3 ) c onstructe d via Algori thm 1 has the op en unit disk as its b oun de d c onsensu s r e gion. Thus, such a pr oto c ol solves the c onsensus pr oblem for ( 1 ) with r esp e ct to Γ N , the set of al l the c ommunic ation top olo gies c ontaining a sp anning tr e e. 1 Matrices U and W can be derived by transfor ming matrix A in to the real Jordan canonical form [ 10 ]. 10 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN Pr o of. Let the related v aria bles b e defined a s in Algo rithm 1 . Assume without loss of generality that ma trix C U is of full r ow rank. Since V T V is an or thogonal pro jection onto range( V T ) = ra nge( U T C T ), ma tr ix C U V T is inv ertible and V T V U T C T = U T C T , so that V = ( C U V T ) − 1 C U , and hence LC U = − U M V T V . Also, the detectability o f ( A, C ) implies that ( M , V ) is observ able. Let U † ∈ R n 1 × n and W † ∈ R ( n − n 1 ) × n be such tha t U † W † = U W − 1 , wher e U † U = I , W † W = I , U † W = 0, and W † U = 0. Then, U U − 1 ( A + (1 − σ ) LC ) U W = M + (1 − σ ) U † LC U (1 − σ ) U † LC W (1 − σ ) W † LC U X + (1 − σ ) W † LC W = M − (1 − σ ) M V T V − (1 − σ ) U † LC W 0 X . (18) By Lemma 4.1 , matrix M − (1 − σ ) M V T V is Sch ur stable for any | σ | < 1. Hence, ( 18 ) implies that matrix A + (1 − σ ) LC with L given by Algorithm 1 is Schur stable for any | σ | < 1, i.e., the pr o to col ( 3 ) co nstructed via Algo rithm 1 ha s a bo unded consensus region in the form of the op en unit disk. Since the eigenv alues of any communication top ology containing a spanning tree lie in the op en unit disk, except eig env alue 1, it follows fro m Corollar y 1 that this pro to col s olves the consensus pr oblem with resp ect to Γ N . In [ 41 ], the consensus of the following coupled netw ork is c onsidered: x + i = Ax i + LC N X j =1 d ij ( x i − x j ) , i = 1 , 2 · · · , N , (19) where ( d ij ) N × N is defined a s in ( 2 ) and matrix L is to b e designed. The main result of [ 41 ] ca n b e easily obtained a s a cor ollary here . Corollary 2. Ther e exists a matrix L such that network ( 19 ) has the op en unit disk as its c onsensus r e gion, i.e., the network c an r e ach c onsensu s with r esp e ct to Γ N , if and only if the p air ( A, C ) is dete ctable. Such a matrix L c an b e c onstructe d via Algo rithm 1. Pr o of. F or any communication top olog y G ∈ Γ N , it follows fr om Theo rem 2.2 that there ex ists a matrix L s uch tha t net work ( 19 ) achieves co ns ensus if and only if matrices A + (1 − λ i ) LC , i = 2 , · · · , N , ar e Sc hur stable. The nece s sity is obvious and the sufficiency follows readily from Theor em 4.2 . Remark 4. Compared to Theor em 6 in [ 41 ], the ab ov e c o rollar y pr esents a neces- sary a nd sufficient co ndition for the e x istence o f a matr ix L that ensures the netw o rk to rea ch co nsensus. Mor e over, the metho d lea ding to this cor o llary is quite different from and compa ratively muc h simpler than that use d in [ 41 ]. Of cour se, it s hould be admitted that the pr o of o f Theor em 4.2 ab ov e is partly inspir e d by [ 41 ]. Example 2 . C o nsider a netw ork of a gents describ ed b y ( 1 ), with A = 0 . 2 0 . 6 0 − 1 . 4 0 . 8 0 0 . 7 0 . 2 − 0 . 5 , B = 0 1 0 , C = 1 0 1 . CONSENSUS OF DISCRETE-TIME LINE AR MUL TI-A GENT SYSTE M S 11 The eigenv alues of matrix A are − 0 . 5 , 0 . 5 ± i0 . 8 66, th us A is neutrally stable . In proto col ( 3 ), choo se K = 1 . 2 − 0 . 9 − 0 . 2 such that A + B K is Sch ur stable. The matr ic e s U = 0 . 1709 − 0 . 493 5 0 . 7977 0 − 0 . 057 0 − 0 . 296 1 , W = 0 0 1 satisfy ( 17 ) with M = 0 . 5 0 . 866 − 0 . 866 0 . 5 and X = − 0 . 5. Thus, U T C T = [ 0 . 1139 − 0 . 7896 ] T . T a ke V = 0 . 1428 − 0 . 98 9 8 such tha t V V T = 1 and ra nge( V T ) = ra nge( U T C T ). Then, b y Algorithm 1, one obtains L = − 0 . 214 3 0 . 78 57 − 0 . 28 57 T . In light o f Theorem 4.2 , the agents considered in this example will reach consensus under the proto col ( 3 ), with K and L given as ab ove, with resp ect to all the communication top ologies con taining a spanning tree. 5. Net work s with Unstable Agen ts. This section co nsiders the general case where matrix A is not ne utr ally stable, i.e., A is allowed to hav e eigenv alues outside the unit circle or ha s at least one eigenv alue with unit mag nitude whose corr e s po nd- ing J o rdan blo ck is of size larger than 1. Before moving forward, one introduces the following mo dified algebraic Riccati equation (MARE) [ 12 , 33 , 35 ]: P = AP A T − (1 − δ 2 ) AP C T ( C P C T + I ) − 1 C P A T + Q, (20) where P ≥ 0, Q > 0, and δ ∈ R . F or δ = 0 , the MARE ( 20 ) is r educed to the commonly-used dis c rete-time Ricc ati equation disc us sed in, e.g., [ 48 ]. The following lemma concer ns the exis tence of solutions for the MARE. Lemma 5.1 ([ 33 , 35 ]) . L et ( A, C ) b e dete ctable. Then, the fol lowing statements hold. a) Supp ose that the matrix A has no eigenva lues with magnitude lar ger than 1, Then, the MARE ( 20 ) has a unique p ositive-definite solution P for any 0 < δ < 1 . b) F or t he c ase wher e A has a le ast one eigenvalue with magnitude lar ger than 1 and the r ank of B is one, the MARE ( 20 ) has a unique p ositive-definite solution P , if 0 < δ < 1 Π i | λ u i ( A ) | , wher e λ u i ( A ) denote t he u nstable eigenvalues of A . c) If t he MAR E ( 20 ) has a unique p ositive-definite s olut ion P , then P = lim k →∞ P k for any initial c ondition P 0 ≥ 0 , wher e P k satisfies P ( k + 1) = AP ( k ) A T − (1 − δ 2 ) AP ( k ) C T ( C P ( k ) C T + I ) − 1 C P ( k ) A T + Q. Prop ositi o n 2. Supp ose that ( A, C ) b e dete ctable. Then, for the c ase wher e A has no eigenvalues with magnitude lar ger than 1, the matrix A + (1 − σ ) LC with L = − AP C T ( C P C T + I ) − 1 is Schur stable for any | σ | ≤ δ , 0 < δ < 1 , wher e P > 0 is the unique solution to the MARE ( 20 ). Mor e over, for the c ase wher e A has at le ast eigenvalue with magnitude lar ger than 1 and B is of r ank one, A + (1 − σ ) LC with L = − AP C T ( C P C T + I ) − 1 is Schur st able for any | σ | ≤ δ , 0 < δ < 1 Π i | λ u i ( A ) | . 12 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN Pr o of. Obser ve that ( A + (1 − σ ) LC ) P ( A + (1 − σ ) LC ) H − P = AP A T − 2 Re (1 − σ ) AP C T ( C P C T + I ) − 1 C P A T − P + | 1 − σ | 2 AP C T ( C P C T + I ) − 1 C P C T ( C P C T + I ) − 1 C P A T = AP A T + ( − 2 Re (1 − σ ) + | 1 − σ | 2 ) AP C T ( C P C T + I ) − 1 C P A T − P + | 1 − σ | 2 AP C T ( C P C T + I ) − 1 − I + C P C T ( C P C T + I ) − 1 C P A T = AP A T + ( | σ | 2 − 1) AP C T ( C P C T + I ) − 1 C P A T − P − | 1 − σ | 2 AP C T ( C P C T + I ) − 2 C P A T ≤ AP A T − (1 − δ 2 ) AP C T ( C P C T + I ) − 1 C P A T − P = − Q < 0 , (21) where the identit y − I + C P C T ( C P C T + I ) − 1 = − ( C P C T + I ) − 1 has b een a pplied. Then, the ass ertion follows directly from Lemma 5.1 and the discrete- time Lyapuno v inequality . Algorithm 2 . Ass uming that ( A, B , C ) is stabilizable a nd detectable, the pr oto col ( 3 ) can the constructed as follows: 1) Select K such that A + B K is Sch ur stable. 2) Choo se L = − AP C T ( C P C T + I ) − 1 , wher e P > 0 is the unique so lutio n of ( 20 ). Remark 5. By Lemma 5.1 and Pro p osition 2 , it follo ws that a s ufficient and nec- essary co ndition for the existence of the consens us proto co l by using Algo rithm 2 is that ( A, B , C ) is stabilizable and detectable for the case where A has no eigenv alues with magnitude larg er than 1. In con trast, δ has to further satis fy δ < 1 Π i | λ u i ( A ) | for the ca se where A ha s at lea st eigenv alue outside the unit circle and B is of ra nk one. The result b elow follows direc tly from Theorem 2.3 and P rop osition 2 . Theorem 5.2. L et ( A, B , C ) b e st abilizab le and dete ctable. Then, the pr oto c ol given by Algorithm 2 has a b ounde d c onsen s u s r e gion in the form of an origin-c enter e d disk of r adius δ , i.e., this pr oto c ol solves the c onsensus pr oblem for networks with agents ( 1 ) with r esp e ct t o Γ ≤ δ , wher e δ satisfies 0 < δ < 1 for t he c ase wher e A has no eigenvalues with magnitu de lar ger than 1 and satisfies 0 < δ < 1 Π i | λ u i ( A ) | for the c ase wher e A has a le ast one eigenvalue outside the unit cir cle and B is of r ank one. Remark 6. Note that Γ ≤ δ was defined in Section 2, which is a subset of Γ m in the sp ecia l case wher e A is neutrally sta ble as discuss e d in the ab ov e sectio n. This is consistent with the intuition that unstable b ehaviors are mor e difficult to synchronize than the neutrally stable ones. Example 3 . L e t the agents in ( 1 ) b e discrete-time double in tegrator s, with A = 1 1 0 1 , B = 0 1 , C = 1 0 . CONSENSUS OF DISCRETE-TIME LINE AR MUL TI-A GENT SYSTE M S 13 Obviously , Ass umption 1 holds here. Cho o se K = − 0 . 5 − 1 . 5 , so that ma trix A + B K is Sch ur stable. Solving equation ( 20 ) with δ = 0 . 95 gives P = 1 0 4 × 1 . 1780 0 . 060 2 0 . 0602 0 . 006 2 . By Algo r ithm 2 , o ne obtains L = − 1 . 051 − 0 . 05 1 T . It follows from Theo rem 5.2 that the agents ( 1 ) r each consensus under proto c ol ( 3 ) with K and L given as ab ove with resp e ct to Γ ≤ 0 . 95 . Assume that the commu nication top ology G is given a s in Figure 2, and the corr esp onding row-sto chastic matrix is D = 0 . 4 0 0 0 . 1 0 . 3 0 . 2 0 . 5 0 . 5 0 0 0 0 0 . 3 0 . 2 0 . 5 0 0 0 0 . 5 0 0 0 . 5 0 0 0 0 0 0 . 4 0 . 4 0 . 2 0 0 0 0 0 . 3 0 . 7 , whose eigenv alues, other than 1 , ar e λ i = 0 . 5 , 0 . 5565 , 0 . 221 7 ± i0 . 25 31. Clearly , | λ i | < 0 . 95, for i = 2 , · · · , 6 . Figure 3 depicts the state tra jectories of netw ork ( 4 ) for this exa mple, which s hows that consensus is actually achiev ed. 1 6 2 5 3 4 Figure 2. The communication top olo gy . 6. Application to F ormation Contr ol. In this section, the consensus a lgorithms are mo dified to solve formation con trol pro blems o f multi-agent sys tems. Let e H = ( h 1 , h 2 , · · · , h N ) ∈ R n × N describ e a constant formation str uc tur e of the ag ent network in a refer ence co ordinate frame, where h i ∈ R n , is the formation v ariable corr esp onding to agent i . F or example, h 1 = 0 0 T , h 2 = 0 1 T , h 3 = 1 0 T , and h 4 = 1 1 T represent a unit square. V ariable h i − h j denotes the relative formation vector b etw een a gents i and j , which is indep endent of the reference co ordinate. A dis tributed formation pr oto col is pro p o sed as v + i = ( A + B K ) v i + L N X j =1 d ij C ( v i − v j ) − ˜ ζ i , u i = K v i , (22) 14 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN 0 20 40 60 80 100 −80 −70 −60 −50 −40 −30 −20 −10 0 10 20 k x i,1 , i=1,...,6 0 20 40 60 80 100 −5 −4 −3 −2 −1 0 1 2 3 k x i,2 , i=1,...,6 0 20 40 60 80 100 −10 −5 0 5 10 15 k v i , i=1,...,6 Figure 3. The state tr a jectories of a double-in tegrator netw ork. where ˜ ζ i = P N j =1 d ij ( y i − y j − C ( h i − h j )) and the rest of v a riables are the same as in ( 3 ). It should b e noted tha t ( 22 ) r educes to the consensus proto col ( 3 ), when h i − h j = 0, ∀ i, j = 1 , 2 , · · · , N . Definition 6. 1 . The agent s ( 1 ) under pr oto col ( 22 ) achiev e a g iven for mation e H = ( h 1 , h 2 , · · · , h N ) if k x i ( k ) − h i − x j ( k ) + h j k → 0 , as k → ∞ , ∀ i, j = 1 , 2 , · · · , N . (23) Theorem 6.2. F or any G ∈ Γ N , the agents ( 1 ) re ach the formation e H under pr oto c ol ( 22 ) if al l the matric es A + B K , A + (1 − λ i ) LC , i = 2 , · · · , N , ar e Schur stable, and ( A − I )( h i − h j ) = 0 , ∀ i, j = 1 , 2 , · · · , N , wher e λ i , i = 2 , · · · , N , denote the eigenvalues of D lo c ate d in the op en unit disk. Pr o of. Let e x i = x i − h i − x 1 + h 1 and e v i = v i − v 1 , i = 2 , · · · , N . Then, the agents ( 1 ) can re a ch the forma tion e H if and only if e x i ( k ) → 0, as k → ∞ , ∀ i = 2 , · · · , N . By inv ok ing ( A − I )( h i − h j ) = 0, i, j = 1 , 2 , · · · , N , it follows fro m ( 1 ) and ( 22 ) CONSENSUS OF DISCRETE-TIME LINE AR MUL TI-A GENT SYSTE M S 15 that e + x i = Ae x i + B K e v i , e + v i = ( A + B K ) e v i + LC N X j =2 d ij ( e v i − e v j ) − N X j =2 d 1 j e v j − N X j =2 d ij ( e x i − e x j ) + N X j =2 d 1 j e x j , i = 2 , · · · , N . Let e i = [ e T x i , e T v i ] T , i = 2 , · · · , N , and e = [ e T 2 , · · · , e T N ] T . Then, one has e + = ( I N − 1 ⊗ A + ( I N − 1 − D 2 + 1 N − 1 α ) ⊗ H ) e, (24) where matrices A , H are defined in ( 4 ), and α = d 12 d 13 · · · d 1 N , D 2 = d 22 d 23 · · · d 1 N d 32 d 33 · · · d 3 N . . . . . . . . . . . . d N 2 d N 3 · · · d N N . By the definition of ma tr ix D , o ne can obtain [ 20 ] S − 1 ( I N − D ) S = 0 α 0 I N − 1 − D 2 + 1 N − 1 α with S = 1 0 1 N − 1 I N − 1 . Therefore, the nonzer o eig e n v alues of I N − D ar e a ll the eigenv alues of I N − 1 − D 2 + 1 N − 1 α . By following similar steps in the Pro o f of Theorem 2.2 , one g ets that system ( 24 ) is as y mptotically stable if and only if all the matrices A + B K , A + (1 − λ i ) LC , i = 2 , · · · , N , are Sch ur stable. This completes the proo f. Remark 7. Note that all kinds o f formatio n structure can no t b e achiev ed fo r the ag ent s ( 1 ) by using proto co l ( 22 ). The achiev able formatio n structures hav e to satisfy the constra int s ( A − I )( h i − h j ) = 0, ∀ i, j = 1 , 2 , · · · , N . The formation proto col ( 22 ) fo r a given a chiev able forma tion structure can b e constructed by using Algorithms 1 and 2. Theorem 6.2 g eneralizes the results g iven in [ 1 3 , 30 ], where the agent dynamics in [ 13 , 30 ] are restr icted to b e (gener alized) second-or de r integrators. Example 4 . C o nsider a netw ork of 6 double integrators, describ ed by x + i = x i + ˜ v i , ˜ v + i = ˜ v i + u i , y i = x i , i = 1 , 2 , · · · , 6 , where x i ∈ R 2 , ˜ v i ∈ R 2 , y i ∈ R 2 , and u i ∈ R 2 are the p osition, the velo city , the measured o utput, and the acceleration input of agent i , res pe c tively . The ob jective is to design a pro to c ol ( 22 ) such that the age nts will evolv e to a regular hexago n with edge length 8. In this ca se, c ho ose h 1 = 0 0 0 0 T , h 2 = 8 0 0 0 T , h 3 = 12 4 √ 3 0 0 T , h 4 = 8 8 √ 3 0 0 T , h 5 = 0 8 √ 3 0 0 T , h 6 = − 4 4 √ 3 0 0 T . As in Example 3 , take K = − 0 . 5 I 2 − 1 . 5 I 2 and L = − 1 . 051 I 2 − 0 . 051 I 2 T in pro to col ( 22 ). Then, the a gents with 16 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN such a proto c o l ( 22 ) will form a regular hexago n with resp ect to Γ ≤ 0 . 95 . The sate tra jectories o f the 6 agents are de pic ted in Figure 4 for the communication top ology given in Figure 2. −40 −20 0 20 −100 0 100 200 0 20 40 60 80 x y k Figure 4. The agents for m a reg ular hexago n. 7. Conclusions. This pap er ha s studied the co nsensus of dis crete-time multi-agent systems with linear o r linear ized dynamics. An observer-type pr oto col based on the relative o utputs of neig hboring ag ents has been prop os ed, which ca n b e s een as an extension of the traditional observer-based controller for a single system to one for multi-agent sy stems. The co nsensus of high-dimens io nal multi-agent s y stems with directed communication top olo gies can b e co n verted into the s ta bilit y of a set of matrice s with the same low dimensio n as that of a single agent. The notion of discrete-time conse ns us re gion has b een int ro duced and ana lyzed. F or neurally stable a gents, an a lg orithm has b een pr esented to construct a proto co l having a bo unded consensus r egion in the form of the op en unit disk. Moreov er, for unstable agents, another a lgorithm has also been pro po sed to construct a pr oto col having a n origin-centered disk of radius δ (0 < δ < 1) as its c onsensus region. The consensus algorithms ha ve b een further applied to solve forma tio n control problems of multi- agent systems. T o some extent, this pap er genera lizes some exis ting r e sults r e po rted in the liter ature, and op ens up a new line for further r e search on discr ete-time multi- agent sys tems. REFERENCES [1] D. Bauso, L. Giarr´ e and R. Pesen ti, Consensus f or net owrks with unknown but b ounde d disturb anc es, SIAM J. Cont rol Optim. , 48 (2009), 1756–1770. [2] S. Bow ong and J. L. Dimi, A daptive synchr onization of a class of unc ertain chaotic systems , Discret. Con tin. Dyn. Syst., 9 2008, 235–248. [3] J. Cort ´ es, Distribute d algorithms for r ea ching co nsensus on gener al functions, Automatica, 44 (2008), 726–737. [4] Z. S. D uan, G. R. Chen and L. Huang, Synchr onization of weighte d networks and c omplex synchr onize d r e gions, P hys. Lett. A, 372 (2008), 3741–3751. CONSENSUS OF DISCRETE-TIME LINE AR MUL TI-A GENT SYSTE M S 17 [5] Z. S. Duan, G. R. Chen, and L. Huang, Disc onne cte d synchr onize d re gions of c omplex dy- namic al networks, IEEE T rans. Autom. Control, 54 (2009), 845–849. [6] J. A . F ax and R. M. M urray , Information flow and c o op er ati v e c ontr ol of vehicle formations , IEEE T rans. Automat. Control, 49 (2004), 1465–1476. [7] P . F rasca, R. Carli, F. Pa gnani and S. Zampieri, Aver age c onsensus on net works with q uan- tize d c ommunic ation, Int. J. Robust Nonlinear Con trol, 19 (2008), 1787–1816. [8] Y . Hong, J. Hu and L. Gao, T r acking c ontr ol for multi-agent c onsensus with an active le ader and variable t op olo gy, Automatica, 42 (2006), 1177–1182. [9] Y . Hong, G. R. Chen and L. Bushnell, Distributed obse rv ers design for le ader-fol lowing c ontr ol of multi-agent , Automatica, 44 (2008), 846–850. [10] R. Hor n and C. Johnson, “Matrix Analysis,” Cambridge Univ. Pr ess, New Y ork, 1985. [11] A. Jadbabaie, J. Lin and A. S. M orse, Co or dination of gr oups of mobile autonous agents using ne ar e ast neighb or rules, IEEE T rans. Autom. Control, 4 8 (2003), 988–1001. [12] T. Kata ya ma, On the matrix Ric c ati e quation for linea r syst ems with a r andom gain, IEEE T rans. Autom. Control, 21 (1976), 770–771. [13] G. Lafferriere, A. Will iams, J. Caughman and J. J. P . V eerman, De c entr alize d c ontr ol of vehicle formations, Syst. Con trol Lett., 54 (2005), 899–910. [14] Z. K. Li, Z. S. Duan and L. Huang, H ∞ c ontr ol of networke d multi-agent systems, J. Syst. Sci. Complex., 22 2009, 35–48. [15] Z. K. Li, Z. S. Duan, G. R. Chen and L. Huang, Consensus of multiagent systems and synchr onization of c omplex net works: A unifie d vie wp oint, IEEE T rans. Cir cuits Syst. I- Regul. Pap., 51 (2010), 213–224. [16] Z. K . Li, Z. S. Duan and G. R. Chen, Dynamic co nsensus of line ar multi-agent systems, IET Con trol Theory Appl., 5 (2011), 19–28. [17] P . Lin, Y. M. Jia and L. Li, D istribute d r obust H ∞ c onsensus co ntr ol in dir e cted net works of agents wit h t ime-delay, Syst. Cont rol Lett., 57 (2008), 643–653. [18] P . Lin and Y. M . Jia, F urther r esults on de c entr alise d c o or dination in networks of agents with se c ond-or der dynamics, IET Control Theory Appl., 3 (2009), 957–970. [19] C. Liu, Z. S. Duan, G. R. Chen and L. Huang, A nalyzing and c ontr ol ling the network syn- chr onization r egions, Physica A, 3 86 (2007), 531–542. [20] C. Q. Ma and J. F. Zhang, Ne c essary and sufficient c onditions for c onsensusability of line ar multi-agent systems , IEEE T rans. Autom. Control, 55 (2010), 1263–1268. [21] K. Ogata, “Mo dern Con trol Engineering,” 3 r d edition, Pren tice H al l: Englewoo d Cliffs, 1996. [22] R. Olfati-Sab er and R. M. M urray , Consensus pr oblems in net works of agents with switching top olo gy and time-delays, IEEE T rans. Autom. Control, 49 (2004), 1520–1533. [23] R. Olf ati-Saber, Flo cking for multi- agent dynamic systems: A lgorithms and the ory, IEEE T rans. Autom. Control, 51 (2006), 401–420. [24] R. Olfati-Sab er, J. A. F ax and R. M. Murray , Consensus and c o op er ation in net worke d multi- agent sy stems, Pro. IEEE, 97 (2007), 215–233. [25] L. M. Pe cora and T. L. Car roll, Master stability functions for sy nchr onize d c ouple d systems, Ph ys. Rev. Lett., 80 (1998), 2109–2112. [26] W. Ren and R. W. Beard, co nsensus se ek ing in multiagent systems under dynamic al ly chang- ing i nt er action top o gies, IEEE T rans. Autom. Control, 50 (2005), 655–661. [27] W. Ren, R. W. Beard and E. M. Atkins, Information co nsensus in multivehicle c o op er ative c ontr ol, IEEE Con trol Syst. Mag., 2 7 (2007), 71–82. [28] W. Ren, K. L. Mo ore and Y. Q . Chen, Hig h-or der and mo del r efe r enc e c onsensus algorithms in c o op er ative c ontr ol of multi-v e hicle syste ms , J. Dyn. Syst. Meas. Control-T rans. ASME, 129 (2007), 678–688 . [29] W. Ren, O n c onsensus algorithms for double-inte gr ator dynamics, IEEE T rans. Autom. Con- trol, 53 (2008), 1503–1509. [30] W. R en and N. Sorensen, Di st ribute d c o or dination ar chitectur e f or multi-r obo t formation c ontr ol, R ob ot. Auton. Syst., 56 (2008), 324–333. [31] A. Rahmani, M. Ji , M. Mesbahi and M. Egerstedt, Contr ol lability of multi-agent sy stems fr om a gr aph-the or e ctic p ersp e ctive, SIAM J. Cont rol Optim., 48 (2009), 162–186. [32] L. Scardavi and S. Sepulchre, Synchr onization in networks of ident ic al line ar systems, Auto- matica, 45 (2009), 2557–2562. [33] L. Sc henato,B. Sinopoli, M. F rancesc hetti, K. P o ol la, M. I. Jordan and S. S. Sastry , F ounda - tions of c ontr ol and estimation over lossy networks, Proc. IEEE, 95 (2007), 163–187. 18 ZHONGKUI LI, ZHISHENG DUAN AND GUANRONG CHEN [34] J. H. Seo, H. Shim and J. Back , Consensus of high-or der linea r systems using dynamic output fe e db ack c omp ensator: L ow gain appr o ach, Automatica, 4 5 (2009), 2659–2664 . [35] B. Si nopoli, L. Sc henato, M. F rancesc hetti, K . Poolla, M. I. Jordan and S. S. Sastry , Kalman filtering with intermitte nt observations, IEEE T rans. Autom. Cont rol, 49 (2004), 1453–1464. [36] Y. G. Sun and W. Long, Consensus pr oblems in networks of agents with double-inte gr ator dynamics and ti me-varying delays , In t. J. Control, 82 (2009), 1937–1945. [37] R. S. Smi th and F. Y. Hadaegh, Contr ol of de ep-sp ac e formation-flying sp ac e cr aft; R elative sensing and switche d information , J. Guid. Control Dyn. , 2 8 (2005), 106–114. [38] H. S. Su. X. F. W ang Z. L. Lin, Flo cking of multi-agent s with a virtual le ader , IEEE T rans. Autom. Control, 54 (2009), 293–307. [39] H. G. T anner, A. Jadbabaie and G. J. Pappas, Flo cking in fixe d ans switching networks , IEEE T rans. Autom. Control, 52 (2007), 863–868. [40] Y. P . Tian and C. L. Liu, R obust c onsensus of multi-agent syst ems with dive rse input delays and asymmetric inter c onne ction p erturba tions, Automatica, 45 (2009), 1347–1353. [41] S. E. T una, Synchr onizing line ar systems via p artial-state c oupling, Automatica, 44 (2008), 2179–218 4. [42] S. E. T una, Conditions for synchr onizability in arr ays of co uple d line ar sy stems, IEEE T rans. Autom. Control, 54 (2009), 2416–2420. [43] T. Vicsek, A. Cziro´ ok, E. Ben-Jacob, I. Cohen and O. Sho che t, Novel ty p e of phase tr ansiti ons in a syst em of self- driven p articles , Phys. Rev. Lett., 75 (1995), 1226–1229. [44] J. H. W ang , D . Z. Cheng and X. M . Hu, Consensus of multi-agent line ar dynamic systems , Asian J. Con trol, 10 (2008), 144–155. [45] G. Xie and L. W ang, Consensus co ntr ol for a class of net works of dynamic agents, Int. J. Robust Nonlinear Cont rol, 17 (2007), 941–959. [46] R. Y amapi and R. S. Mack a y , St abilit y of synchr onization in a shift- invariant ring of mutual ly c ouple d oscil lators , Discret. Contin. Dyn. Syst., 1 0 (2008), 973–996. [47] H. T. Zhang, M. Z. Q. Chen, T. Zhou and G. B. Stan, Ultr afast c onsensus via pr e dictive me chanisms , Europhysics Letters, 8 3 (2008), 40003. [48] K. M. Zhou and J. C. Do yle, “Essent ials of Robust Cont rol,” Prentice-Hall, Englewoo d Cliffs, 1998. Received xxxx 20xx; r evised xxx x 20xx. E-mail addr ess : zhongkli@gmail .com E-mail addr ess : duanzs@pku.edu .cn E-mail addr ess : eegchen@cityu. edu.hk
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment