Nonholonomic deformation of KdV and mKdV equations and their symmetries, hierarchies and integrability
Recent concept of integrable nonholonomic deformation found for the KdV equation is extended to the mKdV equation and generalized to the AKNS system. For the deformed mKdV equation we find a matrix Lax pair, a novel two-fold integrable hierarchy and …
Authors: Anjan Kundu, R. Sahadevan, L. Nalinidevi
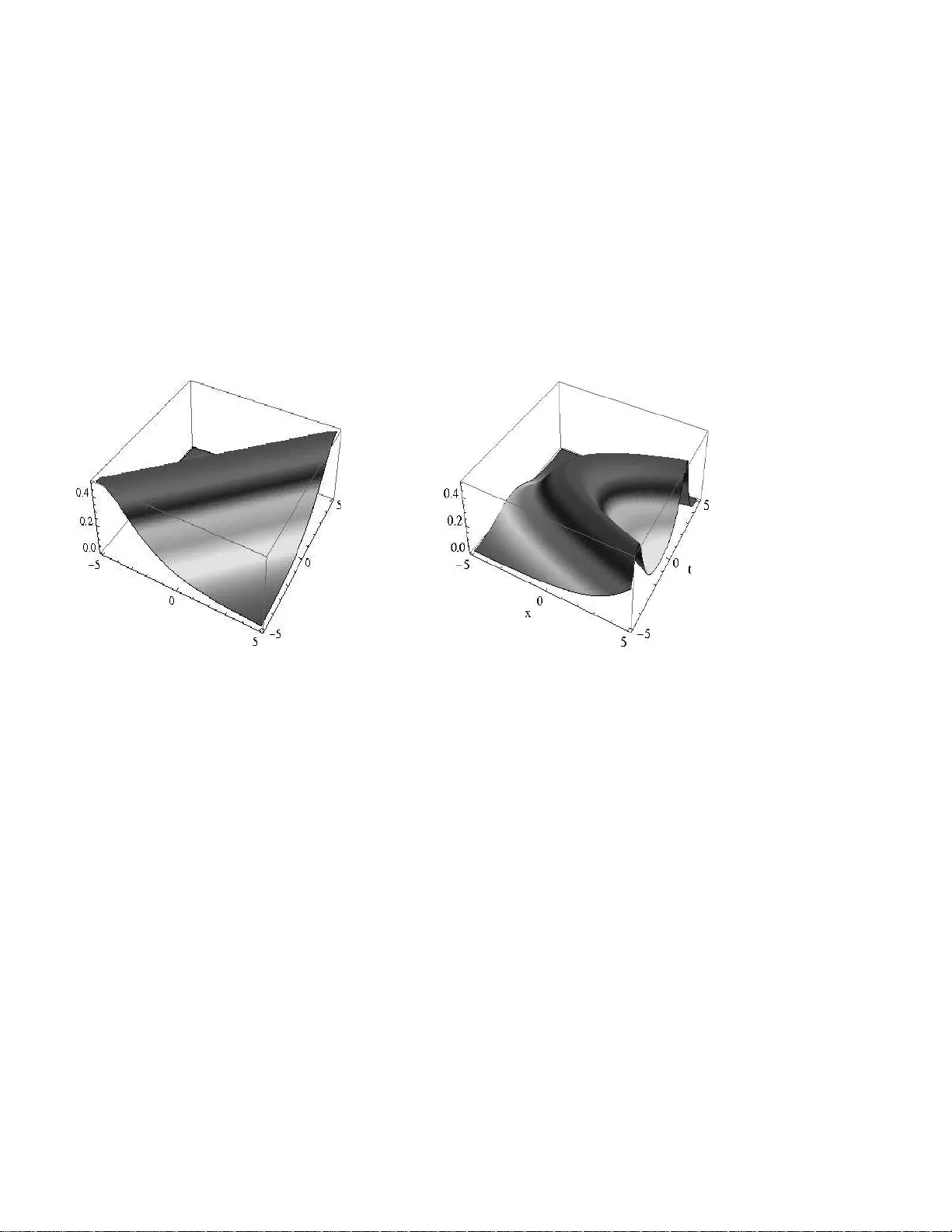
Nonholonomic deformation of KdV and mKdV equation s and th eir symmetrie s, hie rarc hies and in tegrabilit y Anjan Kundu ∗ Theory Group & CAMCS, Saha Institut e of Nuclear Ph ysics Calcut ta, INDIA R. Sahadev an † and L. Nalini devi ‡ Ramanujan Institut e for Adv anced Study in Mathema tics, Universit y of Madras , Chennai - 600 005, T amil nadu, INDIA Octob er 2 5, 2 018 Abstract Recen t concept of in tegrable nonholonomic deformation found for the K dV equation is extended to the m K dV equation and generalized to the AKNS sys tem. F or the deformed mKdV equation w e find a matrix Lax p air, a no v el tw o-fold integrable hierarc h y and exact N-soliton solutions exhibiting unusual accele rating motion. W e s h o w that b oth the deformed KdV and mKdV systems p ossess infinitely man y generalized symmetries, conserv ed quan tities and a r ecursion op erator. Short tit le : In tegrable nonholonomic deformations of KdV a nd mKdV P A CS: 02.30.lk, 02.3 0.jr, 05.45.Yv, 11.10.Lm, Key Wor ds Inte gra ble nonholonomic deformation, deformed mKdV, KdV a nd AKNS systems, Lax pair, accelerating N-soliton, tw o- fold in tegrable hierarc hy , generalized symmetry , conser- v ation law, recursion op erato r . 1 In tro ducti on Recen tly disco ve red integrable 6 -th order Kortew eg de V ries (KdV) equation [1] w as shown to represen t a nonholono mic deformation (NHD) of the we ll known KdV equation preserving ∗ anjan.kundu@saha .a c.in † rama jay amsaha@ yaho o.co .in ‡ lnalinidevi@yaho o.co.in 1 its in tegrability a nd exhibiting an integrable hierarch y [2]. In a subsequen t deve lopmen t a matrix Lax pair, the N-soliton solution through inv erse scattering transform (IST) metho d and an intriguing t w o-f old inte gra ble hierarch y w ere fo und for this par t icular system b y one of the authors [3]. The NHD of the KdV (dKdV) was sho wn recen tly to b e a certain fo rm of self-consisten t source equation (SCSE) allow ing particular exact solutions [4]. The NHD for suc h field theoretical mo dels is g iv en by a constrain t in the form o f nonlinear differen tial equation in v olving only x -deriv ative s on a single p erturbing function, whic h is deforming the orig inal in tegrable equation. This type of integrable defo r ma t ion is a relatively recen t disco v ery , whic h a llo ws also an in tegrable hierarc h y o f higher order deformations. On the other hand the construction of SCSE is a well kno wn concept [8], whic h is represen ted usually b y a coupled system consisting of the original integrable equation with a n a dditio nal term made f rom the eigenfunctions and 2N eigenv alue equations of the Lax op erator with explicit dep endence on N discrete eigen v alues. In general the eigenfunctions and eigenv a lues ar e complex and one can also add another 2N num b er of ev olution equations fo r the eigenfunctions. In a recen t dev elopmen t of such SCSE its Roso chatius defor ma t io n is pro p osed [4 ]. A t certain limit or at particular cases the con tact b etw een the lo we st order NHD and the SCSE can b e found, though the integrable hierarc h y of higher order deformations seems to b e p ossible only for the NHD. In a sligh tly generalized form this deformed KdV equation can b e giv en as u t − u xxx − 6 uu x = g x ( t, x ) , (1) g xxx + 4 ug x + 2 u x ( g + c ( t )) = 0 , (2) where subscript denote partial deriv ativ es. Though the time-dep enden t arbitrary function c ( t ) can b e absorb ed in equation (2 ) b y redefining perturbing function g ( x, t ) , we ke ep it in the explicit form for our conv enience. Recall that, the KdV and the mo dified KdV ( mKdV) are in timately related partner systems [5]. Therefore it would b e natural to expect that the concept of NHD found for the KdV should also b e extendible to the mKdV equation. W e show here that this exp ectation is indeed true by constructing explicitly a nov el in tegrable NHD of the mKdV (dmKdV) equation, whic h can yield a new in tegrable 4 th order p oten tial mKdV equation. W e disco v er fo r t his in tegrable deformed mKdV equation with a nonholonomic constrain t a matrix Lax pair, exact N-solito n solutions a nd a no ve l tw o-fold integrable hierarch y , similar to the result of the dKdV [3]. The solitons, found for b oth the basic field a nd the p erturbing function of the dmKdV, sho w un usual accelerating (or decelerating) mot ion. W e sho w t ha t b oth the deformed KdV a nd mKdV systems p ossess infinitely many generalized symmetries and conserv ed quan tities, and a recursion op erator whic h hav e b een studied until now only for their undeformed coun terparts. The Lie symmetry analysis w e p erform here for t he deformed equations leads also to explicit construction for the hierarchies of the generalized symmetries for b oth the basic field and the p erturbing functions. Our a na lysis of the con tin uity equation for the dKdV and dmKdV rev eals that the conserv ed densities f or these deformed systems remain the same as in their original undeformed cases, whereas the current densities (fluxes) explicitly contain the deforming functions. This sho ws the intriguing fact that the nonholonomic deformations can app ear only at the equation lev el, while the conserv ed in tegrals of motion remain the same under NHD. 2 Finally we unify dKdV a nd dmKdV to disco v er an integrable nonholonomic deformation for the more general AKNS [5] system. The plan of the pap er is as follows. In section 2 the new NHD of the mKdV equation and the related in tegrability structures suc h as the matrix La x pair and the exact N -soliton solution ar e presen ted. Tt is a lso shown that the dmKdV admits infinitely man y higher order or generalized symmetries, conserv ed quan tities and a recursion op erator. In section 3 a similar analysis has b een carried o ut for the dKdV equation. Section 4 generalizes the nonho lo nomic deformation to the AKNS system, rev ealing a no v el tw o-fold in tegrable hierarc hy for all its mem b ers and consequen t ly for the dmKdV a nd the dKdV systems. In section 5 w e give a brief summary of our results a nd the concluding r emarks. 2 Nonholon omic d eformation of the mKdV equation In tegrable equations with NHD should b e driven b y an additio nal p erturbativ e or deforming function, whic h in turn w ould b e sub jected to a differential constraint o f nonho lo nomic nature. Therefore, analogous to the deformed KdV equation (1- 2) w e prop ose a deformed mo dified KdV equation with nonholonomic constraint as v t − v xxx − 6 v 2 v x = w ( t, x ) , (3) w x − 2 v ( c 2 ( t ) − w 2 ) 1 2 = 0 . (4) Note that the arbitr a ry function c ( t ) can b e remo v ed again f r o m the equation (4) by rescaling w ( x,t ) c ( t ) → w ( x, t ) . W e ho we ve r k eep c ( t ) in the explicit form fo r the later conv enience. A t c ( t ) = 0 w e should ha v e the deforming function w ( x, t ) = 0 , when the dmKdV (3-4) w ould reduce to the standard mKdV equation. F or establishing the in tegrability of (3-4) w e derive the asso ciated pa ir of mat r ix Lax op erators in the form U ( λ ) = U mkdv ( λ ) , V ( λ ) = V mkdv ( λ ) + V def ( λ ) , (5) where U mkdv ( λ ) , V mkdv ( λ ) are the w ell kno wn Lax pair for the standard mKdV system [5]: U mkdv ( λ ) = iλσ 3 + iv σ 1 , V mkdv ( λ ) = 2 iλ ( v 2 − 2 λ ) σ 3 − 2 iλv x σ 2 + i ( v xx − 4 λ 2 v + 2 v 3 ) σ 1 , (6) while the a dditional term V def ( λ ) = i 2 λ ( bσ 3 − w σ 2 ) , where b = ( c 2 ( t ) − w 2 ) 1 2 (7) is resp onsible for the deformation of the mKdV equation. Here σ a , a = 1 , 2 , 3 are standard P auli matrices σ 1 = 0 1 1 0 , σ 2 = 0 − i i 0 , σ 3 = 1 0 0 − 1 (8) and σ ± = 1 2 ( σ 1 ± iσ 2 ) . F or confirming the Lax in tegrability of the NHD of the mKdV equation (3-4) we sho w that it is deriv able from the flatness condition U t − V x + [ U, V ] = 0 o f the 3 Lax pair (5). In this pro cess o ne finds that , the expressions in all p o sitive p ow ers of λ n , n = 1 , 2 , 3 v anishes trivially , while that for n = 0 yields the deformed mKdV equation ( 3-4). The co efficien ts with the p ow er n = − 1 giv es in turn the constraint equations b x = − 2 v w , w x = 2 v b (9) from whic h eliminating function b by using b = ( c 2 ( t ) − w 2 ) 1 2 w e arriv e a t the constrain t (4) as required. Note t ha t one can also find a single higher order nonlinear equation b y eliminating further the deforming function w ( x, t ) from the set of equations (3-4). By introducing a p oten tial field θ x = 2 v w e can rewrite Eq. (4) in the form θ x = w x ( c 2 − w 2 ) 1 2 , giving an easy solution w = c ( t ) sin θ , whic h can b e c hec k ed by direct substitution, since w x = cθ x cos θ while ( c 2 − w 2 ) 1 2 = c cos θ . Inserting these expressions of w , v and hence tho se of v t , v xxx , v 2 v x through θ in Eq. (3) one can deriv e a new integrable 4-th order p oten tial mKdV equation in θ giv en b y ( θ t − θ xxx − 1 2 θ 3 x ) x = 2 c ( t ) sin θ . (10) In terestingly , ke eping only the term θ xt in the LHS, while grouping the other terms as f ( θ ) = ( θ xxx + 1 4 θ 3 x ) x , (11) one can rewrite Eq. (10) in the form of a p erturb ed sine-Gordon ( SG ) equation in the ligh t-cone co ordinates as θ xt = 2 c ( t ) sin θ + f ( θ ) , (12) with a time-dep enden t mass parameter m 2 = 2 c ( t ) , p erturb ed by a function (11). Significan tly unlik e most o f the p erturb ed SG equation (12- 11), derived here, is integrable allo wing exact N-soliton solution. Th us the inte gra ble higher order dmKdV equation (10) is equiv alent to the NHD of the dmKdV equation (3-4), whic h in turn is equiv alent to the set o f equations (3) with (9). 2.1 Exact soliton solutions As is w ell known any p erturbation usually sp oils the integrabilit y of a nonlinear system and hence fo rbids general analytic solutions. How ev er t he dmKdV w e ha ve constructed retains its complete inte gra bilit y in spite of the p erturbatio n with nonholonomic constraint. Therefore ex- ploiting this integrabilit y prop erty we intend to derive exact N-soliton solutions for the dmKdV equation (3-4) or equiv alen tly for the nov el 4-th order p otential mKdV equation (10), through the IST metho d. The pro cedure follows that for the standard mKdV equation [6] in its initial steps, while in the final step the effect o f deformation should b e incorp orated. It is in triguing to not e from (5), that for t he dmKdV equation, only the time L ax op erator V is deformed, while the space part U is k ept unc hanged. This rev eals an imp ortant connection b etw een the deformed time ev olution of the Jost solution and the NHD of the nonlinear equation. 4 Recall that for extracting the exact soliton solution in the IST the space-Lax op erator U ( λ ) describing the scattering of the Jost f unctions, play s the ke y role. Only at the final stage w e need to fix the time ev olution of the solito ns thro ug h the time-dep endence of the sp ectral data, whic h in turn is determined from t he asymptotic v alue of the t ime-L a x op erator V ( λ ) | | x |→∞ . Therefore following [6] w e can deriv e the N-soliton solution f or our deformed mKdV equation as v ( x ) = [ d 2 dx 2 ln detA ( x )] 1 2 , (13) where the matr ix function A ( x ) is expressed through its elemen ts as A nm = N X l =1 f nl f lm , where f nm = δ nm + β n β m κ n + κ m e − ( κ n + κ m ) x . (14) Here para meters κ n , n = 1 , 2 , . . . , N , denote the time-indep enden t zeros o f the scattering matrix elemen t: a ( λ = λ n ) = 0 , along the imaginary a xis: λ n = iκ n and β n ( t ) = b ( λ = λ n ) are the t ime-dep enden t sp ectral data t o b e determined f rom V ( λ ) = V mkdv ( λ ) + V def ( λ ) , at x → ±∞ . Note that due t o the b oundary condition (BC) v → 0 , w → 0 at x → ±∞ , the asymptotic v alue of (6): V mkdv ( λ ) → − 4 iλ 3 σ 3 corresp onds to the undeformed part, while the BC b → c ( t ) at x → ±∞ , determines t he crucial effect of deformation V def ( λ ) → i 2 λ − 1 c ( t ) σ 3 . As a result w e o btain β n ( t ) = β n (0) e (8 κ 3 n t + ˜ c ( t ) κ n ) , ˜ c t ( t ) = c ( t ) , (15) yielding finally the ( x, t ) dep enden t exact soliton solution from (14). T o see the effect of deformation o n the dynamics o f the solitons more closely we construct 1- soliton solution for the dmKDV equation as reduced from (13-15) at N = 1 : v ( x, t ) = v 0 2 sec h ξ , ξ = κ ( x − v t ) + φ , v = v 0 + v d (16) where the phase φ is an arbitra ry constant, v 0 = 4 κ 2 is the usual constant v elo city o f the mKdV soliton, while v d = 2˜ c ( t ) v 0 t is the un usual time-dep enden t part of the v elo cit y , induced b y the deformation. No t e that the time-dep enden t asymptotic v alue of the deformation acts here lik e a forcing term sitting at t he space b oundaries, whic h for c ( t ) = c 0 t with c 0 > 0 forces the soliton to accelerate, while with c 0 < 0 makes it decelerate (see Fig 1). It is imp ortant to note, that the ev olution of the basic field v ( x, t ) comes here from tw o sources: ∂ t v = ∂ t 0 v + ∂ t d v , induced b y tw o differen t ‘times’ t 0 and t d . ∂ t 0 v = ∂ t v | c ( t )=0 is the evolution due to the unp erturb ed time t 0 , caused by the standar d disp ersiv e and nonlinear terms in (3), while ∂ t d v = c ( t ) ∂ ˜ c ( t ) v is the ev olution due to the deformed time t d , caused b y the p erturbatio n link ed as w = ∂ t d v , b = c ( t ) + Z v ∂ t d v d x. (17) Therefore using (1 7 ) and ∂ ˜ c ( t ) β n ( t ) = 1 κ n β n ( t ) w e can find fro m (13- 15) t he N-soliton solution corresp onding to w , b , whic h for N = 1 deriv ed from (1 6 ) giv es also lo calized accelerating solution w ( x, t ) = c ( t ) κ sec h ξ tanh ξ a nd b ( x, t ) = c ( t )(1 − κ 2 sec h 2 ξ ) . (18) 5 This shows that the p erturbing function, taking itself the solitonic form driv es the field soliton to ha ve an accelerated motion, while in turn the basic field solution self-consisten tly determines the solitonic fo r m of the p erturbing f unction, sustaining th us the in tegrability of the system. 2.2 Generalized symmetries It is w ell kno wn that the Lie symmetry analysis pla ys an effectiv e role to study the in tegra- bilit y prop erties of nonlinear ev olutio n equations in (1+1) dimensions suc h as the existence of infinitely many generalised symmetries, conserv ed quantities and a recursion op erator ([9], [10], [11], [12], [13]). W e sho w here that similar analysis can b e p erformed with equal success f or our deformed mKdV equation (3- 4). Note that the dmKdV equation is inv aria n t under the scaling or dilatatio n symmetry ( t, x, v , w , c ( t )) → ( s − 3 t, s − 1 x, s 1 v , s 4 w , s 4 c ( t )) , where s is an arbitr ary parameter which suggests that v corresp onds to one deriv ativ e with re- sp ect to scaling x , w corresp onds to three deriv ativ es with resp ect to x and c ( t ) corresp onds to four deriv a tiv es with resp ect to x . W e w ould like to men tion tha t Hereman and his collab o- rators hav e dev elop ed a n algorithm to deriv e generalised symmetries, conserv ed quantities a nd recursion op erators for nonlinear partia l differential a nd differen tial-difference equations [14 ]. Hereman’s algorithm is based basically o n the concept of w eigh ts a nd r a nks. The w eigh t W of a v ariable is defined a s the exp onen t in the scaling parameter s whic h multiplies the v ariable. W eigh ts o f the dep enden t v ariables a re non-negative and rational. An expression is said to b e uniform in rank if all its terms ha v e the same rank. Setting W ( D ) = W ( ∂ ∂ x ) = 1 , w e see that W ( v ) = 1 , W ( w ) = 4 , W ( b ) = 4 , W ( c ( t )) = 4 and W ( ∂ ∂ t ) = 3 and hence eqn. (3) is of ra nk 4 and (4) is o f rank 5 . This prop erty is called the uniformit y in rank. The rank of a mo no mia l is defined as the t o tal w eight of the monomial, a gain in terms of deriv ativ es with resp ect to x . No w, assume t hat the deformed mKdV equation (3-4) is in v aria n t under one parameter nonp oint contin uous transformat io ns t ∗ = t, x ∗ = x, v ∗ = v + ǫG i + O ( ǫ 2 ) , w ∗ = w + ǫH i + O ( ǫ 2 ) , (19) where G i = G i ( v , w , v x , v xx , v xxx , v 4 x , .., w x , w xx , · · · ) H i = H i ( v , w , v x , v xx , v xxx , v 4 x , .., w x , w xx , · · · ) pro vided v ( x, t ) and w ( x, t ) satisfy equation (3- 4). Consequen t ly w e obtain the follow ing in v ariant equations D G i D t = D 3 G i D x 3 + 6 v 2 D G i D x + 12 v v x G i + D H i D x , (20) D 2 H i D x 2 = 2 G i p ( c ( t ) 2 − w 2 ) − 2 v w D H i D x p ( c ( t ) 2 − w 2 ) , (21) 6 where D D x = ∂ ∂ x + v x ∂ ∂ v + w x ∂ ∂ w + v xx ∂ ∂ v x + v xt ∂ ∂ v t + w xx ∂ ∂ w x + w xt ∂ ∂ w t + · · · D D t = ∂ ∂ t + v t ∂ ∂ v + w t ∂ ∂ w + v xt ∂ ∂ v x + v tt ∂ ∂ v t + w xt ∂ ∂ w x + w tt ∂ ∂ w t + · · · . F rom equations (20-21), we see that G 1 = v x , H 1 = w , (22) is a trivial generalized symmetry with rank (2 , 4) . This suggests that the next generalized symmetry G 2 and H 2 of dmKdV mus t hav e ra nk (4,6) . With this in mind we first form monomials in v and w o f rank (4 , 6) , Th us the most general form of G 2 and H 2 will b e G 2 = a 1 v 2 v x + a 2 v 3 x + a 3 w , H 2 = b 1 v 2 w + b 2 w 2 x , (23) where a i , b i , i = 1 , 2 , 3 are arbitrary constan ts to b e determined. W e now substitute G 2 and H 2 in the in v ariant equation (20- 21),with i = 2 and using (3- 4) w e find that the consistency condition holds o nly for t he following parametric restrictions: a 1 = 6 , a 2 = 1 , a 3 = 0 , b 1 = 6 , b 2 = 1 and so the g eneralized symmetry with rank (4 , 6) b ecomes G 2 = 6 v 2 v x + v 3 x , H 2 = 6 v 2 w + w 2 x . (24) Pro ceeding as ab ov e, for i = 3 , we find that the in v ariant equations (20- 21) satisfy only if G 3 = v 5 x + 10 v 3 x + 40 v v x v 2 x + 10 v 2 v 3 x + 30 v 4 v x , (25) H 3 = w 4 x + 10 v 2 x w + 20 v v 2 x w + 20 v v x w x + 10 v 2 w 2 x + 30 v 4 w , (26) whic h is a next non trivial generalized symmetries with rank( 6,8 ). In a similar manner w e can deriv e infinitely many generalized symmetries { ( G 4 , H 4 ) , ( G 5 , H 5 ) , · · ·} for (3- 4) with rank { (8 , 10) , (10 , 12 ) , · · · } . W e ha v e also c hec k ed that the commutator [ G i , G i +1 ] = 0 , [ H i , H i +1 ] = 0 , ∀ i, indicating that dmKdV eqn. (3-4) admits an infinitely man y generalized symmetries whic h comm ute. 2.3 Recursion op erator In this section we deriv e a R ecursion op erator , a n imp ortant prop erty of the integrable systems, for our deformed mKdV eqn. (3-4), whic h is usually p ossible to obtain only for the unp erturb ed 7 in tegrable systems. An op erato r v alued function R is said to b e a recursion op erato r of a scalar nonlinear partial differential equation with tw o indep enden t v aria bles if it satisfies ˜ G = R G, where ˜ G and G are successiv e generalized symmetries. F or (3- 4) the ab o ve equation can b e written as G k +1 H k +1 = R G k H k = R ; 11 R 12 R 21 R 22 G k H k , (27) where ( G k , H k ) a nd ( G k +1 , H k +1 ) are successiv e generalized symmetries and R ij , i, j = 1 , 2 are functions of dep enden t v a r ia ble and their differen tial and integral op erators. The construction of the recursion op erator R for the dmKdV equation is as follows: F or k = 2 equation (27) b ecomes G 3 H 3 = R 11 R 12 R 21 R 22 G 2 H 2 (28) where ( G 2 , H 2 ) and ( G 3 , H 3 ) are the generalized symmetries of ranks (4 , 6) and (6 , 8) resp ec- tiv ely . The ra nks of R 11 , R 12 , R 21 and R 22 can b e determined from the follo wing relations r ank G 3 = r ank R 11 + r ank G 2 = r ank R 12 + r ank H 2 , (29) r ank H 3 = r ank R 21 + r ank G 2 = r ank R 22 + r ank H 2 , (30) Equations (29-30) sho w that the ra nks of R 11 , R 12 , R 21 , R 22 resp ectiv ely are 2 , 0 , 4 , 2 and so w e consider the en tries of R written in terms of differential a nd in tegral op erato rs of the dep enden t v ariables having the form R 11 = c 0 ∂ 2 + c 1 v 2 + c 2 v x ∂ − 1 v , R 12 = 0 , R 22 = g 0 ∂ 2 + g 1 v 2 + g 2 v ∂ − 1 v x , R 21 = f 0 w ∂ − 1 v + f 1 v ∂ − 1 w + f 2 v 4 + f 3 w + f 4 v 4 x ∂ − 1 + f 5 v 2 ∂ 2 , (31) where c i , g i , i = 0 , 1 , 2 a nd f j , j = 0 , 1 , 2 , 3 , 4 , 5 are constants to b e determined. Substituting the ab ov e in (28) w e find that it is satisfied identic ally only if c 0 = 1 , c 1 = 4 , c 2 = 4 , f 0 = 4 , f 1 = 4 , f 2 = f 3 = f 4 = f 5 = 0 , g 0 = 1 , g 1 = 4 , g 2 = − 4 and therefore t he recursion op erator for the dmKdV equation b ecomes R = ∂ 2 + 4 v 2 + 4 v x ∂ − 1 v 0 4 w ∂ − 1 v + 4 v ∂ − 1 w ∂ 2 + 4 v 2 − 4 v ∂ − 1 v x . (32) 2.4 Conserv ed quan tities A lo cal conserv ation la w of a partial differen tial equation with tw o independent v aria bles ( x, t ) is defined by ∂ ∂ t ρ + ∂ ∂ x J = 0 (33) 8 whic h is satisfied on all solutions. The function ρ ( x, t ) is usually called lo cal conserv ed densit y and J ( x, t ) is the asso ciated flux also kno wn as curren t dens ity . W e show that the dmKdV (3-4) or eqn.(3) a nd (8) admit infinitely many p olynomial conserv ed quan tities. F rom (3), w e find directly t ha t ρ [1] = v , J [1] = − ( v xx + 2 v 3 + Z dxw ) (34) is a tr ivial conserv ed quan tity with rank (1 , 3) . Recall that (3) a nd (8) is inv arian t under scaling symme try ( t, x, v , w , b, c ) → ( s − 3 t, s − 1 x, s 1 v , s 4 w , s 4 b, s 4 c ) , where s is an arbitrary parameter. T o derive a conserv ed quantit y with rank (2 , 4) , as b efore, w e f orm monomials of v ( x, t ) a nd w ( x, t ) whic h giv es the list L 1 = { v 2 } . Thus the conserv ed densit y of rank 2 will b e ρ ( x, t ) = v 2 . As a result w e obtain ρ [2] = v 2 , J [2] = − 2 v v xx − 3 v 4 + v 2 x + b. (35) Pro ceeding as ab ov e w e find the next tw o conserv ed quan tities as ρ [3] = v 4 − v 2 x , J [3] = − 4 v 6 − 4 v 3 v xx + 2 v x v xxx − v 2 xx + 12 v 2 v 2 x + 2 v 2 b, (36) ρ [4] = v 6 − 5 v 2 v 2 x + 1 2 v 2 xx , (37) J [4] = − 9 2 v 8 − 6 v 5 v xx + 10 v 2 v x v xxx − v xx v 4 x + 1 2 v 2 xxx − 8 v 2 v 2 xx + 45 v 4 v 2 x − 10 v v 2 x v xx − 1 2 v 4 x + 3 v 4 b − v 2 x b − 2 v v x b x . (38) with ranks (4,6) a nd (6 ,8 ) resp ectiv ely . In a similar manner we can deriv e an infinitely man y conserv ed quan tities ( ρ ( x, t ) , J ( x, t )) for dmKdV with ranks { (8 , 10) , (10 , 12) . . . } whic h in- v olv e length y expressions a nd so the details are omitted here. It is imp ort a n t to notice that the in tegrals of motion describing infinite nu mber of in- tegrated conserv ed quan tities c n , n = 1 , 2 , . . . , whic h should b e comm utativ e as a necessary criterion of Liouville inte gra bilit y can b e give n b y c n = R ρ [ n ] dx . It is clearly seen from the con- tin uit y equation (33) that due to v anishing of the fields along with their deriv at ives at the space- infinities we natura lly o btain ∂ t c n = 0 . Therefore f r om the expressions o f ρ [ n ] , n = 1 , 2 , . . . , deriv ed ab o ve w e get t he conserv ed quan tities for the dmKdV equation as c 1 = Z v d x, c 2 = Z v 2 dx, c 3 = Z ( v 4 − v 2 x ) dx (39) with c 3 = H mkdv b eing the Hamiltonian of the mKdV equation. W e see therefore that the conserv ed quan tities including the Hamiltonian remains the same for b oth the deformed and undeformed mKdV systems, though the corresponding equations for the dmKdV with addi- tional p erturbing function and nonholonomic constrain t on it ar e surely differen t. Note also that this effect of deformation c hanges the structure of the lo cal curren t densities J [ n ] , n = 1 , 2 , . . . , whic h con tain the deforming functions w , b , but not t he densities ρ [ n ] , whic h g enerate the conserv ed quan tities. 9 3 Nonholon omic deformatio n o f the KdV equation and its in teg rabilit y asp ec ts Nonholonomic constrain ts on field mo dels ha v e receiv ed increasing atten tion ov er recen t ye ars , while a significan t breakthrough is made recen tly b y disco v ering an in tegrable nonholono mic deformation for t he KdV equation [1, 2, 3, 4]. It has b een established that t his deformed KdV equation like the undeformed standard KdV admits Lax pair, N-soliton solutions and a tw o-fold in tegrable hierarc h y [3 ]. The deformed KdV can b e considered also as a source equation [4], whic h is how eve r differen t from and simpler than the w ell kno wn source KdV equation [8 ]. The no v elt y of this source is that it can b e deformed recursiv ely b y go ing to the next order in its in tegrable hierarc h y with higher order deformatio ns [3, 7]. Ho w ev er many other fundamen tal and imp orta n t prop erties of the in tegrable systems, suc h as the existence o f an infinite num b er of generalized symmetries , conserv ed quan tities a nd a r ecursion o p erator, whic h ha v e b een w ell established fo r the standard KdV equation hav e not y et b een studied for their nonholono mically deformed extension, inv estigation of whic h is therefore our aim here. 3.1 Generalized symmetries The deformed KdV equation (1- 2) is obvious ly in v arian t under the dilatat io n symmetry ( t, x, u, g , c ( t )) → ( s − 3 t, s − 1 x, s 2 u, s 4 g , s 4 c ( t )) , (40) where s is a n arbitrary parameter whic h suggests that u corresp o nds to t w o deriv ativ es, while b oth g and c ( t ) correspond t o four deriv ativ es, with resp ect to x . Setting W ( D ) = W ( ∂ ∂ x ) = 1 , therefore one gets W ( u ) = 2 , W ( g ) = 4 , W ( c ( t )) = 4 and W ( ∂ ∂ t ) = 3 and hence equations (1- 2) is of rank (5 , 7) . This prop erty is called the uniformity in rank. Now, assume that the deformed KdV equation (1-2) is in v ar ian t under one parameter con tinuous nonp o in t transformations u ∗ = u + ǫG i + O ( ǫ 2 ) , (41) g ∗ = g + ǫH i + O ( ǫ 2 ) , (42) where G i = G i ( u, g , u x , u xx , u xxx , u 4 x , .., g x , g xx , · · · ) H i = H i ( u, g , u x , u xx , u xxx , u 4 x , .., g x , g xx , · · · ) pro vided u ( x, t ) and g ( x, t ) satisfy equations (1-2). Consequen tly we obtain the following in v ariant equations D G i D t = D 3 G i D x 3 + 6 u D G i D x + 6 u x G i + D H i D x , (43) D 3 H i D x 3 + 4 u D H i D x + 4 G i g x + 2 D G i D x ( g + c ( t )) + 2 u x H i = 0 . (44) 10 F rom (4 3-44) w e deriv e t he following g eneralized symmetries G 1 = u x , H 1 = g x G 2 = 6 uu x + u 3 x , H 2 = 6 ug x + g 3 x , (45) whic h are trivial ones with ranks (3 , 5) and (5 , 7) , r esp ectiv ely . Pro ceeding as b efore w e find that (1- 2) admits an infinitely man y generalized symmetries, where the first t w o non trivial generalised symmetries are G 3 = 30 u 2 u x + 20 u x u xx + 10 uu 3 x + u 5 x , H 3 = 30 u 2 g x + 10 u x g xx + 10 u 2 x g x + 10 ug 3 x + g 5 x , and G 4 = 140 u 3 u x + 70 u 3 x + 280 uu x u 2 x + 70 u 2 u 3 x + 70 u 2 x u 3 x + 42 u x u 4 x + 14 uu 5 x + u 7 x H 4 = 140 u 3 g x + 70 u 2 x g x + 140 uu x g 2 x + 140 uu 2 x g x + 70 u 2 g 3 x +42 u 2 x g 3 x + 28 u 3 x g 2 x + 28 u x g 4 x + 14 u 4 x g x + 14 ug 5 x + g 7 x with ranks (7 , 9) and (9 , 11) , resp ectiv ely . Note that the remaining higher order generalised symmetries in v olv e length y expressions and hence not presen ted here. W e find a lso that the comm utator relations [ G i , G i +1 ] = 0 , [ H i , H i +1 ] = 0 , ∀ i hold. It is straigh tforward again to chec k that the deriv ed generalised symmetries satisfy G i +1 H i +1 = R G i H i ∀ i, with the recursion op erato r R = ∂ 2 + 4 u + 2 u x ∂ − 1 0 2 g x ∂ − 1 + 2 ∂ − 1 g x ∂ 2 + 4 u − 2 ∂ − 1 u x . (46) 3.2 Conserv ed quan tities Recall t ha t t he dKdV equation (1-2) is inv a r ian t under the dilatation symmetry ( t, x, u, g ) → ( s − 3 t, s − 1 x, s 2 u, s 4 g ) . W e can sho w again that the dKdV equation admits an infinitely man y conserv ed quan tities. F rom (1- 2), w e find that ρ [1] = u, J [1] = − ( u xx + 3 u 2 + g ) (47) corresp ond to a trivial conserv ed quan tit y with rank (2 , 4) . T o deriv e the next conserv ed quan tit y with rank (4 , 6) we form monomials of u and g as b efore, whic h give the list L 1 = { u 2 , u xx } . Thus the most general form of the conserv ed densit y of rank 4 would b e ρ ( x, t ) = c 1 u 2 + c 2 u xx , with c 1 , c 2 are constan ts. It is straigh tfor ward to che ck t ha t the next order conserv ed densit y and asso ciated flux ρ [2] = u 2 , J [2] = ( − 4 u 3 − 2 uu xx + u 2 x + 2 ug + g xx + 2 uc ( t )) (48) 11 satisfy (33). In a similar manner w e obtain in the next higher order ρ [3] = (4 u 3 − 2 u 2 x ) , J [3] = ( − 18 u 4 + 24 uu 2 x − 12 u 2 u xx − 2 u 2 xx + 4 u x u 3 x − g 4 x + 4 u 2 g + 4 u 2 c ( t ) − 2 u xx c ( t ) − 2 u xx g − 6 u x g x ) . (49) W e wish to add that the next higher order conserv ed quantities inv olv e lengthy expressions and so w e refra in from presen ting them. W e can ob viously construct the comm uting f a mily of integrated conserv ed quan tit ies as ab ov e: c n = R ρ [ n ] dx with ∂ t c n = 0 . Therefore from the corresp o nding ρ [ n ] , n = 1 , 2 , . . . , we get the conserv ed quantities for the dKdV equation as c 1 = Z u dx, c 2 = Z u 2 dx, c 3 = Z (4 u 3 − 2 u 2 x ) dx, ... (50) with c 3 = H k dv b eing the Ha milto nian of the KdV equation. Therefore w e see again that f o r the deformed KdV system, the conserv ed quan tities remain the same as in the undeformed case, though the corresp onding equation gets deformed due t o the nonholonomic constrain t. 4 Generalizati on to the nonholonomic deformation o f the AKNS s ystem In sect. 2 w e ha ve disco ve red a new integrable no nholonomic deformation o f t he mKdV system, extending the dKdV. Here we inte nd to sho w that these deformed systems can b e unified and generalized further to an integrable nonholonomic deformation of the AKNS [5] system: q t − q xxx − 6( q r ) q x = g x , (51) r t − r xxx − 6( q r ) r x = f x . (52) F or finding the inte gra ble nonholonomic constraints on the deforming functions g , f we in- tro duce the deforming matrix G (1) = g σ + + f σ − + bσ 3 and similarly for G (2) , and de- note the AKNS fields in the matrix form U (0) = q σ + + r σ − . In tegrabilit y condition, i.e. the flatness conditio n of the asso ciated deformed Lax pair (with the additional deformation V ( def ) 2 ( λ ) = i 2 ( λ − 1 G (1) + λ − 2 G (2)) ), therefore leads to the nonholonomic constraint: G (1) x = i [ U (0) , G (1) ] + i [ σ 3 , G (2) ] , G (2) x = i [ U (0) , G (2) ] . (53) Higher order inte gra ble deformations can b e generated recursiv ely b y adding to V ( def ) 2 ( λ ) more terms like i 2 λ − j G ( j ) , j = 3 , . . . n with arbitrary n . It w ould result to a new integrable hierarch y of nonholonomic deformations of the AKNS (dAKNS) system, given explicitly through the higher order constrain ts G (1) x = i [ U (0) , G (1) ] + i [ σ 3 , G (2) ] , . . . , G ( n − 1) x = i [ U (0) , G ( n − 1) ] + i [ σ 3 , G ( n ) ] , G ( n ) x = i [ U (0) , G ( n ) ] . (54) 12 F or n = 1 this hierarch y clearly reduces to G (1) x = i [ U (0) , G (1) ] , (55) while for n = 2 giv es (53). The in tegrability o f the dAKNS system (51-5 3) is guaran teed from its a sso ciated matrix Lax pair U ( λ ) = iλσ 3 + iU (0) , U (0) = q σ + + r σ − , V ( λ ) = V AK N S ( λ ) + V def ( λ ) , (56) where V AK N S ( λ ) = iU (0) xx − 4 iλ 3 σ 3 + 2 σ 3 λ ( − U (0) x + i ( U (0) ) 2 ) − 4 iU (0) λ 2 + 2 i ( U (0) ) 3 − [ U (0) , U (0) x ] , V def ( λ ) = 1 2 ( λ − 1 G (1) + λ − 2 G (2) ) . (57) W e can chec k that the flat ness condition U t − V x + [ U, V ] = 0 of this Lax pair yields the dAKNS system (51-53). Note that w e can generate a no v el tw o-fo ld in tegrable hierarch y for this deformed AKNS sys tem. F irstly , b y k eeping the p erturb ed equations (51-52) the same, but b y increasing the order of the differen tial constrain t recursiv ely as (54), we o bta in a new in tegrable hierarc h y for the dAKNS. Secondlly , by k eeping the constrain t fixed to its low est lev el, i.e. as (55 ) or (5 3), o ne can increase a lso the order of the AKNS equation with higher disp ersions in the lefthand side of (51- 5 2) in the standard w a y , generating another integrable hierarc h y . This general deformed AKNS system along with its t w o-fo ld in tegrable hierarc h y prop osed here can yield as particular cases b oth the dmKdV and the dKdV equations considered ab ov e. One can c hec k that the dmKdV equation prop osed here can b e obta ined directly from the dAKNS through the reduction q = r = v , whic h degenerates (5 1-52) to the same equation (3), while the constraint (4) is deriv ed fro m (55) with G (1) = i ( c 2 ( t ) − w 2 ) 1 2 σ 3 + iw σ 2 , G (2) = 0 . (58) Similarly for deriving the dKdV from the general case o f dAKNS system we ha v e to consider the particular reduction q = u, r = 1 , whic h ob viously mak es (5 2) trivial while reduces (51) to the defor med KdV (1). At the same t ime the constraint (2) can b e deriv ed by solving (53) as G (1) = i ( g + c ) σ 3 − g x σ + G (2) = g x 2 σ 3 + i ( g + c ) σ − + eσ + , e x = iug x , (59) where u ( x, t ) is the KdV field and ( x, t ) is t he deforming function with c ( t ) as its asymptotic v alue lim | x |→∞ g ( x, t ) = c ( t ) . Reductions of the deformed AKNS system to other imp ortant in tegrable deformatio ns, e.g. NHD of the nonlinear Schr¨ odinger and sine-Gordon equations hav e b een considered in [7]. 13 5 Conclud ing re marks W e ha v e extended the concept of nonholo nomic deformation from the KdV equation to the mKdV equation and constructed for this no ve l deformed system a ll essen tial a nd imp o rtan t structures of an in t egr a ble system, lik e a matrix Lax pair, exact N-soliton solution through IST, in tegra ble hierarc hies etc. Interes tingly . the in tegrable deformed mKdV, that w e ha v e disco v ered here, shows ev en a richer picture tha n t ha t of the usual inte gra bilit y . In particular, it allows accelerating exact solitons f o r the basic field as well as for the p erturbing function. The p erturbing function, similar to the deformed KdV case [3], takes a consisten t solitonic form and forces the field soliton throug h its asymptotic v alue c ( t ) at space infinities, to mo v e with a n acceleration (or deceleration). Therefore suc h a self consisten t solitonic p erturbation, whic h pr eserv es the in tegrability , could b e significan tly imp ortant in lab orato ry exp erimen ts with mKdV solitons, where the usual loss of energy inevitable in a realistic system could b e comp ensated for by the driving force g iv en fr o m the b oundaries a s found here. Moreo v er, the deformed mKdV system sho ws a no v el t w o- f old in tegrable hierarc h y , as f ound also for the deformed KdV [3]. The first one corresp onds to the standard mKdV hierarc h y with higher disp ersions but p erturb ed with a deforming function sub jected to a giv en nonholo no mic constrain t. The second o ne is a new hierarch y of equations, where the same mKdV equation is p erturb ed no w by a function with increasingly hig her order of nonholonomic constraint. In parallel with the established pro cedure for finding the symmetries of the in tegrable equations, we hav e constructed f o r the first time an infinite num b er of generalized symmetries, conserv ed quan tities and a recursion op erato r for b oth the deformed KdV and the defor med mKdV equations. It rev eals a remark able fact that, t hough the deforming functions are con- tained in lo cal curren t densities, the lo cal densities do not ha v e a n y dep endence on them. Hence the in tegrated conserv ed quan tities are also not influenced b y the deformation and remain the same as in the unp erturb ed case. Finally w e ha v e unified and generalized the deformed KdV and mKdV equations to the deformed AKNS system, with explicit construction of its Lax pair and a tw o- fold in tegrable hi- erarc h y . Particular r eductions of this new deformed integrable AKNS system yield the deformed KdV as w ell as the deformed mKdV system presen ted here. The study o f the deformed P ainlev ´ e class of equations obta ined as reductions of the dKdV and dmKdV equations, a p oten tially imp ortant pro ject, w e wish to pursue further. References [1] A.Kara su-Kalk anli, A.Karasu, A.Sak ovic h, S.Sak ov ich, and R.T urhan , A ne w inte gr able gener ali z a tion of the K ortewe g-de -V rie s e quation J.Math.Ph ys. 49 ,073 5 16 (2008 ) . [2] B.A.Kup ershmidt, KdV6: An inte gr able system Ph ys. Lett. A 372 , 2634 (20 08). 14 [3] A.Kundu, Exact ac c eler ating solitons i n nonholonomic deformation of the KdV e quation with two-fold inte gr able hier ar chy , J. Ph ys. A: Math. Theor. 41 , 495201 (2008). [4] Y uqin Y ao , Y un b o Zeng, The bi-Hamiltonian structur e and new so lutions of KdV6 e qua- tion , arXiv:0810.1986[nlin.SI] Oct 14, 200 8. [5] M. J. Ablowitz, D.J.Kaup, A.C.New ell and H. Segur, The inverse sc attering tr ansform - F ourier ana lysis for nonline ar pr oblems , Stud.Appl.Math. 53 249 (1974) . [6] M. W a da ti, The exact solution of the mo d i fie d Kortewe g-d e V ries e quation J. Ph ys. So c. Jpn., 32 , 1681 ( 1972) [7] A.Kundu, Nonline arizing line ar e quations to inte g r able systems in c luding new hier a r chies with nonholonomic deforma tion s terms ,arXiv:0711 .0878v3, 16 Jun 2008. [8] V. K. Melnik ov, Inte gr ation metho d of the KdV e quation with a se l f - c onsis tentl sour c e , Ph ys. Lett. A133 , 493 (1 9 88). [9] L.V.Ovisannik ov, Gr oup A nalysis of Differ ential Equations , Academic Press, NewY or k (1982). [10] P .J.Olv er, Applic ations of Lie Gr oups to D iffer en tial Equations, Springer, Berlin, (1986). [11] G .Bluman and S.Kumei, Symmetries and D iffer en tial Equations, Springer,Berlin (1 989). [12] A.S.F ok as, Symmetries and inte gr abili ty , Stud. Appl. Math. 77 , 25 3 (1987). [13] M.Lakshmanan and P . Kaliappan, Lie tr ansformation s , nonlin e ar evol ution e quations and Painlev´ e forms J.Math.Ph ys. 24 , 79 5 (1983). [14] W. Hereman, J.A. Sanders, J.Say ers and J.P .W ang, Symb olic c omputation of p olyno- mial c onserve d densities, gene r alise d symmetries and r e cursion op er ators for nonline ar differ ential- differ enc e e q uations, In: Group Theory and Numerical Analysis, CRM Pro c- cedings and Lecture Series 39 Eds. P .Win ternitz etal, Americal Mathematical So ciety , 2 67 (2005). 15 Figure 1: Ex act soliton solutions in t he (x,t)-plane: a) for the standard mKdV equation with constan t soliton v elo cit y (indicated b y its constan t inclination), b) for the nonholonomically deformed dmKdV equation with accelerated soliton (reflected in its curv ature with c ( t ) = 0 . 5 t ). 16
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment