Small Turing universal signal machines
This article aims at providing signal machines as small as possible able to perform any computation (in the classical understanding). After presenting signal machines, it is shown how to get universal ones from Turing machines, cellular-automata and …
Authors: Jer^ome Dur, -Lose
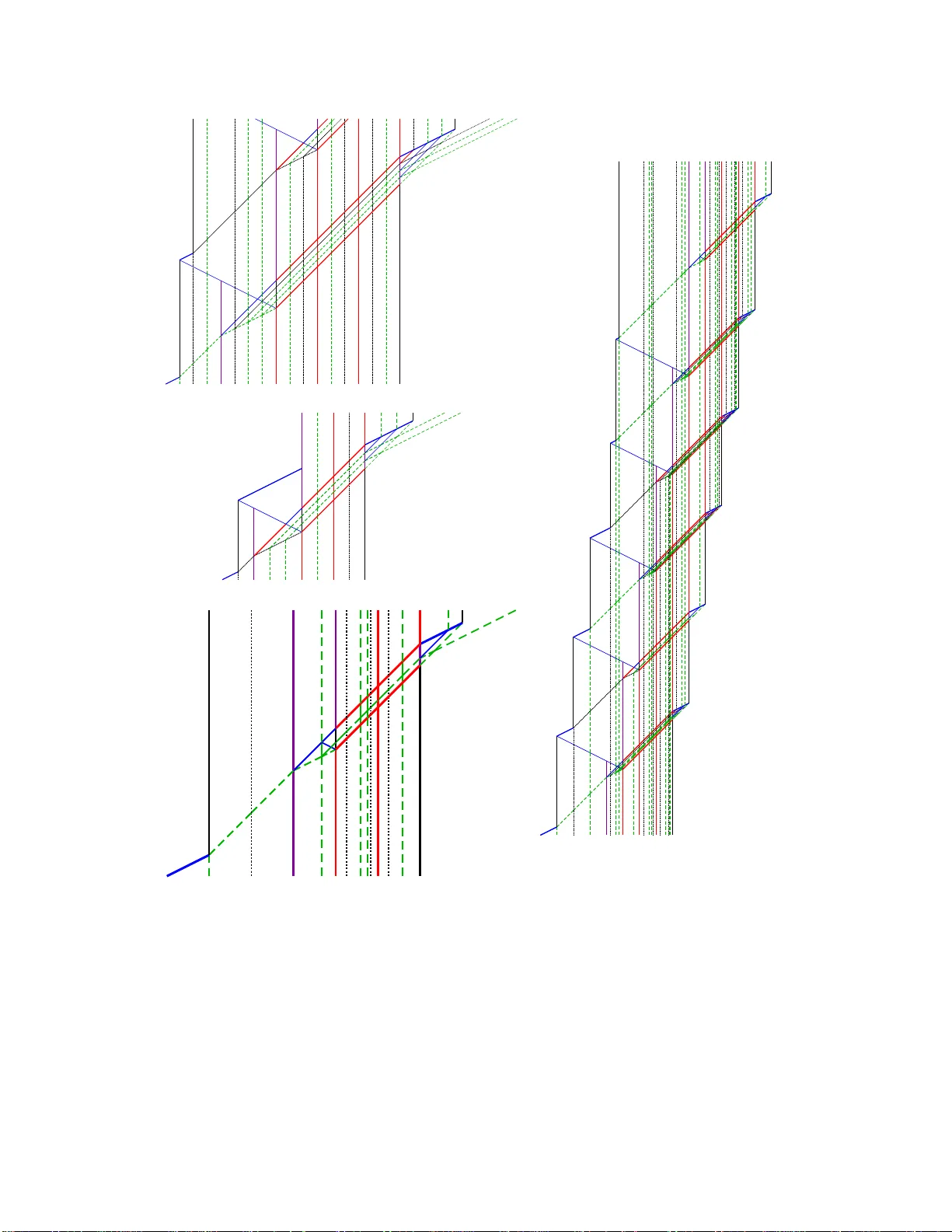
T . Neary , D. W oods, A.K. Seda and N. Murphy (Eds.): The Complexity of Simple Programs 2008 . EPTCS 1, 2009, pp. 70–80, doi:10.4204/EPTCS.1.7 c J. Durand-Lose Small T uring universal signal machine s J ´ er ˆ ome Durand-Lose Laboratoire d’Informatique Fondam entale d’Orl ´ eans, Univ ersit ´ e d’Orl ´ eans, B.P . 6 759, F-45067 ORL ´ EANS Cede x 2. Jerome.Dur and-Lose@u niv-orleans.fr This article aims at providing signal machines as sm all as p ossible able to perform any computation (in the classical under standing). After presenting signal mach ines, it is shown how to get universal ones from T u ring machines, cellular-automa ta a nd cyclic tag systems. Finally a halting universal signal machine with 13 meta-signals and 21 collision rules is presented. 1 Introd uction Computatio n and uni vers ality hav e been defined in the 1930’ s. In the last five or so decades, it has been un veiled how common they are. T he questio n about the frontier moved from pro ving the univ ersa lity of dynamic al systems to the complexit y of univ ersal machines . This is not only an intellec tual challeng e, b ut also importa nt to find niche s escaping tons of non decidabil ity results or otherwise assert that these niches are too small to be of any inte rest. There hav e already been a lot of in vestig ations on small Tur ing machines (Rogozhin, 198 2, 1996; Mar genste rn , 1995; Kudlek, 1996; Baiocchi, 200 1), re gister mach ines (K orec, 1996), and cel lular au- tomata (Ollinge r , 2002; Cook, 2004). Moreo ver , a s (T uring) uni ver sality (capabili ty to ca rry out an y T urin g/clas sical computa tion) has been de ve loped in very limited systems, some “adaptati ons” were made and variou s noti ons of uni versalit y exi st: • polynomial time univer sal ity w hen polynomial computatio ns (as defined in complexity theo ry) are still done in polynomia l time, as oppos ed to e xpone ntial time univer sali ty provid ed by e.g. 2-coun ter automata, and • semi-univer sality when the computation m ust be started on an infinite configuration –for example the whole tape of a T uring machine is fi lled w ith some ultimately -period ic infinite world– or in many c ases like cellula r automata w hich natur ally work on infinite configu rations . In the prese nt article, minimal uni versal machine i n the c onte xt of Abstr act g eometri cal computation (A G C) is in ve stigate d. A GC has been introduced as a continuou s counterp art of cellular automata. This mov e is inspired by the way dynamics of CA is often designe d or analyzed in an Euclidean space. In A G C, signals are movin g with constan t speed in an Euclidean space. When the y meet, they are replac ed/re writte n; inter acting in a collision based computing way . A signa l machin e (SM) defines exi sting kinds of signa l, meta-si gnals , and their interactions , collision rules . A G C allo ws, since this is a graphi cal model, to understa nd the way the information is m ov ed around and interac ts as sho wn by the v arious illustr ations. Abstract geometric al computation uses continuo us space and time so that the possibilit y Z eno ef fect has to be consid ered. Indeed, it can happen and be used to compute beyo nd T uring comput ability and to J. Durand-Los e 71 climb the arithmetical hierarch y by using accumulati ons of collis ions (Durand-Lose, 2009a). But since only T uring comp utabili ty is addre ssed here, accumulation s are not consi dered. The straightforw ard measure of complexity (or simple/ small-nes s) of an SM is the number of meta- signal s. If there are m meta-sign als defined, then there are at most 2 m − m − 1 po ssible collision rules (at least two signals are needed in a collisi on and the y must be all dif fere nt). Since parallel signals cannot interac t, the number of rules c ould be much lower , b ut ne vertheles s exceed ing by far the numb er of meta- signal s. In many co nstruc tions, only a small part is defined, the rest being either undefined or blank (i.e. signal s just cross ea ch ot her). So th at the number o f spec ially defined ru les is also a good comple ment to the size of an SM. In Dura nd-Lose (2 005a,b), T uring u ni ve rsality is prov en b y red uction from 2-counter auto mata. T his result is not interesting here since the uni v ersal SM they provide are expo nentia l time univ ersal and not ver y small. (For an S M compu tation , the time comple xity is the longest chain of collis ions linked by signal s.) In the p resent article, uni versal SM are generated from T uring machines , cellul ar aut omata a nd cyclic tag systems. In each case, specia l care is taken in order to sav e signals and collisio n rules. For Tur ing machines , only results based on the construct ion in D urand -Lose (2009a) are presented; this direct sim- ulatio n is not detailed since it does not provide the best bound. Cel lular automata (CA) are massi ve ly paralle l devic es w here bo unds are also very tight and pro vide a very small semi-un iv ers al SM . Cyclic tag systems (CTS ) work by considering a binary word and a circu lar list of binary words . At each iteration , the fi rst bit of the word is deleted and if it is 1 the fi rst word of the list is added to th e end of the word, then the list is rotated. CTS are polynomia l time T uring univ ersal (Neary and W ood s, 2006a) and hav e been used to provide the best kno wn bounds on T uring machines (W oods and Neary, 2006, 2007; N eary and W oo ds, 2006b) and cellular automata (Cook, 2004). They also provide the best bound s presented here. Signal machines are presen ted in Section 2. Each followin g sectio n deals with a differe nt univ ersal model and present s ways to simulate them with SM: Tu ring machines in Section 3, cellula r automata in Section 4, and cycli c tag systems in Section 5. Section 6 gathers some conclud ing remarks . 2 Definitions In Abstr act ge ometrica l computat ion , dimensionles s objects are m ovi ng on the real axis. When a colli- sion occurs they ar e replaced according to rules. This is defined by the follo wing machines: Definition 1 A signal machine is defined by ( M , S , R ) where M ( meta-si gnals ) is a fi nite set, S ( spee ds ) a mapping from M to R , and R ( collision rules ) a function from the subsets of M of cardinality at least two int o subsets of M (all these sets are composed of m eta-sig nals of distinct speed). Each instance o f a meta -signal i s a signal . The mapping S assigns speeds to signals. T hey corre spond to the in v erse slopes of the l ine segment s i n space-time diagrams. A collision r ule , ρ − → ρ + , defines what emer ges ( ρ + ) from the collision of two or more signals ( ρ − ). Since R is a function, signal m achine s are determin istic. The ex tended valu e set , V , is the union of M and R plus one symbol for void, ⊘ . A config ura tion , c , is a mapping from R to V such that the set { x ∈ R | c ( x ) 6 = ⊘ } is finite. A n infinite config ura tion , is a similar mapping such that the pre vio us set has no accumulatio n point. A signal correspon ding to a meta-sign al µ at a position x , i.e. c ( x ) = µ , is moving uniformly with consta nt speed S ( µ ) . A signal must start (resp . end) in the initial (resp. final) configur ation or in a 72 Small T uri ng uni ve rsal signal machines collisi on. This corresp onds to con dition 2 i n Def. 2 . At a ρ − → ρ + collisi on, signals corre spond ing to t he meta-sig nals in ρ − (resp. ρ + ) must end (resp . start) and no other signal should be present (condition 3). Definition 2 The space-t ime diagr am issued from an initial configura tion c 0 and lasting for T , is a mapping c from [ 0 , T ] to con figuration s (i.e. from R × [ 0 , T ] to V ) such that, ∀ ( x , t ) ∈ R × [ 0 , T ] : 1. each { x ∈ R | c t ( x ) 6 = ⊘ } is finite, 2. if c t ( x )= µ then ∃ t i , t f ∈ [ 0 , T ] with t i < t < t f or 0 = t i ≤ t < t f or t i < t ≤ t f = T s.t.: • ∀ t ′ ∈ ( t i , t f ) , c t ′ ( x + S ( µ )( t ′ − t )) = µ , • t i = 0 or ( c t i ( x + S ( µ )( t i − t )) = ρ − → ρ + and µ ∈ ρ + ), • t f = T or ( c t f ( x + S ( µ )( t f − t )) = ρ − → ρ + and µ ∈ ρ − ); 3. if c t ( x )= ρ − → ρ + then ∃ ε , 0 < ε , ∀ t ′ ∈ [ t − ε , t + ε ] ∩ [ 0 , T ] , ∀ x ′ ∈ [ x − ε , x + ε ] , • ( x ′ , t ′ ) 6 = ( x , t ) ⇒ c t ′ ( x ′ ) ∈ ρ − ∪ ρ + ∪ {⊘} , • ∀ µ ∈ M , c t ′ ( x ′ )= µ ⇔ or µ ∈ ρ − and t ′ < t and x ′ = x + S ( µ )( t ′ − t ) , µ ∈ ρ + and t < t ′ and x ′ = x + S ( µ )( t ′ − t ) . On space-ti me diagrams, time is increa sing upward. T he traces of signals are line segments whose directi ons are d efined b y ( S ( . ) , 1 ) (1 is the tempora l coordi nate). Collisions c orrespo nd to the extre mities of these seg ments. This definition can easily be exten ded to T = ∞ and to infinite initial configur ation. Although speeds may be any real and thus encode informat ion, in the follo w ing, only a few integer v alues are used. Similarly , the distance between signals m ay be any real but only integer positions are used. 2.1 T ime complexity measure As a computing dev ice, the input is the initial configurati on and the output is the fi nal configuratio n. A SM is T urin g univer sal if there exis ts encodi ngs/re presentations thro ugh which it can go from the code of a T uring machine (or any equiv alent model of computation) and an entry to the output (if any). A GC pro vides dynamical systems with no halting feature. Mainly two appro aches exist to settle this: • an observ er checks that t he end of the computa tion is reached acc ording to so me propert y ove r the configura tion, e.g. the presence of a meta-signal , or • the system reaches a stable state, i.e. no more collisio n is possible. The las t one is prefer red since the hal ting is then a part of the sy stem; althou gh it is somet imes meaning - less: for example, when simul ating a cellular automata, since there is no halting feature in CA, the same discus sion arises again. T o consider polyn omial time uni v ersality , the time complexity of a computation should be defined. Space and time are con tinuou s, by resc aling a finite computation, it can be made as short as wan ted, and e ven w orse: any infinite comp utation startin g from a finite c onfigurat ion can b e auto matically fol ded into a finite portion of the space-ti me dia gram (Durand-Los e , 2009a). So that a correct notion of time comple xity lies elsewhe re. Collision s are cons idered as the discrete steps related by signals : a colli sion is causally befor e ano ther if a signal generate d by the first one ends in the second one. This yields a direct acyc lic graph. Definition 3 The time complex ity of an SM computation is the longest length of a chain in the collision causal ity D A G . For space comple xity one may consi der the longest length of an anti-chain or the maximum number of signals present at the same time (which form a cut). J. Durand-Los e 73 2.2 Generating an infinite periodic signal patter n The aim is to generate a p eriodic infini te seq uence of signa ls on t he sid e of a space-time d iagram. This is useful to generate, starting from a finite number of signals the infinite data for semi-uni v ersalit y (when it is periodic ). For TM, since it happens away from the head, there is no problem. The C A case is not so simpl e as ex plaine d later . In both cases, the increasi ng of the size all o ws to f all back into regular uni v ersalit y . The constru ction works as follo ws: a signal bounce s way and back between two signals , each time it bounces on the upper signal, a signal is emitted. T he boundary signa ls are used to record the locatio n in the pattern. The constructio n is simple and straig htforw ard. It is only presented on an examp le: an infinite sequenc e of period 3, ( µ 1 µ 2 µ 3 ) ω , where each µ i is already defined. The added signals and rules as well as the resulti ng space-time diagram are displayed on Fig. 1. Id Speed boun L 2 bord L 1 , bord L 2 , b o rd L 3 1 Collision rules { boun L , b o rd L 3 } → { µ 1 , bord L 1 } { boun L , b o rd L 1 } → { µ 2 , bord L 2 } { boun L , b o rd L 2 } → { µ 3 , bord L 3 } { bord L 1 , µ 1 } → { µ 1 , bord L 2 , boun L } { bord L 2 , µ 2 } → { µ 2 , bord L 3 , boun L } { bord L 3 , µ 3 } → { µ 3 , bord L 1 , boun L } boun L bord L 1 bord L 3 bord L 1 bord L 1 µ 1 µ 2 µ 3 µ 1 boun L boun L boun L bord L 2 bord L 3 bord L 2 bord L 3 Figure 1: Generating a periodic pattern. T o sav e a signal, the signal is emitted at th e bottom. T he number of added signals is one plus the period (the outpu t signals are not c ounted ). The number of r ules is twice the p eriod. If the out put signal s are to be set at unequal distances, the generato r uses one plus twice the period meta-signals (one for the two bor ders and differe nt way and back for the whole period). 3 T uring machines Due to the poor results genera ted and the lack of space, the presenta tion of T uring machin es and the full constr uction from Durand-Lose (2009a) are not giv en here. The nu mber of meta-si gnals in the sign al machine simulat ing a TM is: 1 for each tape symbol, 2 for each state, and 4 extra signals for enlar ging the tape. The number of collisio n rules is up boun ded by: 2 for each entry of the transition table of the TM, and plu s 2 for each tr ansitio n on the bla nk sy mbol pl us 2 (fo r e nlar gin g the t able). In the cited pap er , TM haltin g correspond s to the head lea ving the tape. W ith a halting state, the correspo nding colli sion rules produce the disapp earance of the state signal, at no extra cost. Consider ing the curv e of Neary and W oods (2006b ); W oods and Neary (20 06, 200 7), this lead s to the follo wing valu es: 18 meta-signals for polynomial time univ ersal ity . The number of collision rules is bound ed by 62. The exact number s hav e not been compute d since fewer meta -signa ls is possible. Semi-uni v ersal T M with fewer stat es exists. L ike the o ne presented in Subsect . 2.2, add hoc construc- tions to generate the extensio n of the tape –to achiev e full univ ersali ty– would add too many states and 74 Small T uri ng uni ve rsal signal machines has not been con sidere d. Fo r semi-u ni ve rsality , using Smith (200 7), the 2-states 3-sy mbol TM generat es a SM with 7 meta-sign als (the ones for enlar ging are not needed) and 6 collision rules. 4 Cellular automata Cellular aut omata (CA) operate ov er infinite arrays of cells. E ach cell can be in finitely many states. (Infinite array is the only way to ensure unboun ded m emory .) A CA changes the states of all the cells simultan eously according to a local function and the states of the two surr oundin g cells. This is parallel, synch ronous , local and uniform process. Definition 4 A cellular automa ton is defined by ( Q , f ) where: Q is a finite set of states , f : Q 3 → Q , is the local function . The glo bal function , G : Q Z → Q Z , is defined by: ∀ i ∈ Z , G ( c ) i = f ( c i − 1 , c i , c i + 1 ) . Only CA of dimension 1 and radius 1 are consider ed here. Higher dimensions can be cover ed simi- larly by higher dimensio n signal machines. Radius 1 means that a cell only communica tes with its two closes t neighbo rs (one on each side). Broader radii could hav e been consid ered, but more signals are needed to c on vey i nformatio n at g reater dista nces (e.g. 5 meta -signal s per stat e instead of 3 for radiu s 2). Halting is not pro vided by C A, it can be defined by reaching a stable /perio dic configuration, the appari tion of a stat e/patte rn in the configuratio n or on some designated cell. In any case, more meta- signal s are needed. There are two ways to manipulate finite C A-configura tions: use some quiescent state , q # (satisf ying f ( q # , q # , q # ) = q # ), for unde fined cells; or use a period ic spatial e xtensio n on both sid e. This patt ern is also (ultimately ) time-periodi c in the CA ev olution. In the simulatio n, the computation is framed by period ic signals according to oblique discrete lines in the s pace-ti me diagram of the CA as illu strate d by the examp le on Fig. 3. The idea is to locat e the cells at inte ger positions and each time the local function is used, three signal s are emitted, one for the cell and one for each of the closest cell on each side. For each state, s , there are three meta-signals: s L , s and s R or speed s − 1, 0 and 1 respecti v ely . A transi tion is performed when a cell recei ve d simultaneousl y the valu es from th is two neighbo rs (spe cial care has to be pu t on locatio ns to ensure exact meetings). T he local function is encod ed in the collision rules : if f ( s , t , u ) = v then the follo wing rule is defined { s R , t , u L } → { v L , v , v R } . Rule 110 is presented Fig. 2 as w ell as a genera ted rule. Output 0 1 1 0 1 1 1 0 Input 1 1 1 1 1 0 1 0 1 1 0 0 0 1 1 0 1 0 0 0 1 0 0 0 zero R one zero L one L one one R Figure 2: L ocal funct ion and the rule implementing f ( 0 , 1 , 0 ) = 1. Evo lution and simulati on on the configurati on 11, framed on the left by ω ( 10 ) and on the right by ( 011 ) ω is presen ted on Fig. 3. As it can be seen, the way the frames are position ed (in boldf ace) in the e v olutio n is not trivi al and neither is the generated periodic pattern on both side of the simulation. W ith the references in Durand-Lose (200 9b) and Ollinger (20 08), it is hard to go belo w 30 meta- signal s for full univ ersa lity . Ollinger (2002); Cook (2004) and Richard and Ollinger (2008) prov ide uni v ersal C A with ve ry few states b ut they use period ic extensio ns that encode a boolean function or a cyc lic tag system which leads to too many meta-signa ls unless a cle v er way to generate them is found. J. Durand-Los e 75 0 1 1 1 0 0 1 1 0 0 1 0 1 1 0 0 0 1 1 1 1 0 1 1 1 1 1 0 1 0 1 1 0 1 Figure 3: E v olutio n and simulation of rule 110 on 11 framed by ω ( 10 ) and ( 011 ) ω . Nev erth eless, with rule 110 (prov ed univ ersal in Cook (2004)), a 6 meta-sign als 8 rules semi-uni v ersal SM is generated. This SM is no t h alting . T o get a halting SM from a CA , one has to kno w precise ly what corres ponds to halt and add signals and rules for the SM to halt. 5 Cyclic tag systems simulation Cyclic tag systems (CTS) are defined by a word and a circ ular list of appenda nts. Both th e word and the appen dants are binary words. The system is updated in the follo wing way: the first bit of the word is remov ed. If it is 1 the n the first a ppenda nt is appended at the end of the word (otherwise nothing is done). Then, the list is rotate d circularly . The list repres ents the code and the word the inpu t. Not only are CTS able to compute (Cook, 2004) b ut also the y can do it with polynomia l slo wdo w n (Neary and W oods, 2006a). The simulation is done with two object s: parallel signals encodin g the word, and a cycle list: each time it cycl es, depe nding on the signals that started it can deliv er a cop y of the first appendan t or not. Signals encoding the word are placed so that deliv ered copies automatical ly enlar ge the wor d on the right. The initial configuration is presente d before the dynamics of the vari ous elements . The signals are defined on F igure 4. T he follo w ing naming con ventio n is used : meta-signals with no subscript hav e speed 0 and the ones with subscrip t L L , R and RR ha v e speed − 2, 1 and 2 respecti v ely . Speed Meta-Signals -2 go LL 0 zero , one , first , sep , last 1 zero R , one R , false R , true R 2 zero RR , one RR , go RR Figure 4: L ist of all the meta-si gnals. As illustra ted on Figure 5, the initial configur ation is composed, left to right, of: last , go LL that starts the dynamics , then one ’ s and z ero ’ s to encode the word, then first to indic ate the beginn ing of the cyclic list then alte rnati v ely one ’ s and zero ’ s to encode each appen dant and sep to separa te them and finally last . The iteration starts when the go LL signal erases last and bounces as go RR . The later erases the fi rst bit and send the correspondi ng signal, zero R or one R to cyclic list. Once the rotation is initiated and the possib le addition of signals is done, a go LL signal is sent back to the word. The emitted one R or zero R signal crosses the one and z ero encoding the word doing nothing until it reache s first where the rotation starts. (For technical reasons, first remains and is remov ed by go LL .) If 76 Small T uri ng uni ve rsal signal machines last go LL go RR last one R one zero one one first zero one one sep one sep zero one one sep zero one last Figure 5: Initial configuration and first collision s for 1011 and list [ 011 , 1 , 011 , 01 ] . the word is empty then go RR meets first . Reaching the empty word is a halting condition so that, is such a case, go RR is just discarde d. Figure 6 lists all the colli sion rules. All non-b lank rules are collision of only two signa ls so that the rules can be pre sented in a two -dimensio nal array . In bla nk collis ion rules, the output is equa l to the input: the sign als just cross each other unaf fecte d. zero one first sep last go LL go RR last , zero R last , one R first one RR zero , zero R , one RR one , one R , one RR go LL , last , false R zero RR zero R , zero RR one R , zero RR go LL , last , false R true R — — first , false R — false R — — sep , go RR — first , one R go LL , true R one R — — first , true R , one RR — — — zero R — — first , false R , zero RR — — — go LL — — go LL go RR zero R one R false R true R go RR last z ero , go RR one , go RR one RR — — — zero RR — — — “—” means blank Other blank rules zero R , zero , go LL zero R , one , go LL one R , zero , go LL one R , one , go LL Figure 6: L ist of all the colli sion rules. The rotati on is handled i n t hree steps: signals are set on move ment –copies are left only if i t i s started by one R – then the signals are mov ing freely to the righ t end of the list, and finally after reaching last the y are positioned . The first part is present ed on Figure 7 . A signal of sp eed 2 ( zero RR or one RR ) is emitted to genera te the speed 1 vers ions of zero ’ s an d one ’ s encoding the first appendan t. A signal of speed 1 is also emitte d as well as anot her one on reach ing the first sep ; these two signals are used to delimit the appenda nt during the translatio n. T he first speed 1 signal is false R for zero R and true R for one R ; so th at the car ried bit is p reserv ed which is u seful to finis h the rota tion. The sig nal to start th e nex t iterati on, go LL , is emitted very quickly (it is not a problem since the next iteration cannot catch up with the rotatio n). This is used to turn false R to true R and to provide a simple halting scheme as explaine d later . From then, the rest of the transla tion is same in both cases. The middle part is straightfo rward: the paralle l f a lse R , zero R and one R are crossin g sep , zero and one until l ast is met. The last part of the rotation could hav e been the symmetric of the first part; in some ways, it is as presen ted on Figure 8 . T o sav e meta-signals , fal se R ha ve been used both to mark the beginnin g and the end of the appe ndant. But the y hav e dif ferent meanings, so the fi rst one changes last to first and the J. Durand-Los e 77 first first zero one one sep zero R one R one R last first go LL false R false R zero R false R true R zero RR (a) Without cop y first first zero one one sep zero R one R one R last first go LL false R false R one R one RR true R zero one one (b) With cop y Figure 7: S tarting the rota tion and restarting the dynamics. second to sep and go RR . The problem is that first intera cts with zero R and one R : zero R (resp. one R ) is chang ed to fal se R (resp. true R ) and one RR (resp. zero RR ). This generate s the lattice in the triangle (the signal s do no t interac t insid e it). The bits of the appendant are now encoded with false R ’ s and true R ’ s and foll o w the pat hs zero R ’ s and one R ’ s wou ld ha ve. It remai ns to g o RR to tu rn the m back i nto zero ’ s a nd one ’ s and to turn the final o ne R to last . go RR , zero RR and o ne RR are p arallel, all the translating signals are paralle l; so that the appendan t is recrea ted with exactl y the same distanc es. last first sep zero one one last false R zero R one R one R false R go RR false R true R true R one R zero RR one RR one RR Figure 8: E nding the rota tion. Figure 9(a) sho ws one full iterat ion of a CTS includ ing a whole rota tion. Figure 9(b) sho ws the haltin g by reaching an empty word. Figure 9(c) shows the effe ct of the haltin g appendan t as expl ained belo w . Figure 9(d) sho w s one entire simulati on with a halting a ppenda nt and cl eaning add ed: blank rules ha ve been modified in order to destro y the garbage signals escaping on the right that nev erthel ess would ne ve r interact with the rest of the configuratio n nor pro v ok e any collisio ns since they are parall el. 5.1 Adding halt at the cost of one rule Three h alting conditions exis t: on emp ty wo rd, on c ycli ng o r o n s pecial h alting a ppenda nt. The first does not yield any result but ne vert heless has to be implemented and already is. T he second needs an extra layer of constru ction to detect cycling and is not considere d. In the third case, when the halt appendant 78 Small T uri ng uni ve rsal signal machines (a) One CTS iteration. (b) Halt by empty word. (c) Use of halt appendant. (d) A full simulation (clean & halt). Figure 9: S imulatio n of a cyclic tag system. is acti vated, go LL has to meet true R . T he posi tion of this collision is determined by the distan ce between first and the nex t sep . It app ends exa ctly at 2 / 3 of the distance. If a one signal is set exac tly at this positi on, it gets into the collision. The extra rule { true R , one , go LL } → { true R } J. Durand-Los e 79 is used to destro y both one and go LL . T hen the rotation fi nished and no m ore collision is possib le. The result of the computa tion is the sequence left of first . The rotating proce ss ensur es that the distances between the signals remain constant, so that a one at 2 / 3 remains there (and a one not at 2 / 3 cannot get to 2 / 3). It should also be ensured that, in the initial positi on, there is no one at 2 / 3 not standin g for hal t which is straight forwar d to reach by , e.g., using locatio ns 1 / 2, 3 / 4, 7 / 8. . . 6 Conclusion Theor em 5 Ther e is a univer sal ha lting signal machine with 13 meta-signals and 21 non-blank rules. Ther e is a non-halti ng semi-un iver sal signa l m ach ine with 6 meta-signa ls and 8 non-b lank rules. The first construc tion uses a collisio n with 3 signals. A 3-signal collision needs perfec t synchron y while 2-signa l collisi ons are more robus t to small perturbatio ns. If only 2 signals collisions are allowed, then a halting meta-sign als can be added and proces sed in the circular list as the va lue 1 (exce pt that it does not generate other signals in the lattice at the end of the rotation). This leads to a signal machine with 15 meta-sig nals (the same ones plus ha l t and hal t R ) and 24 non blan k rules. The race for small uni v ersal devic es also runs for restriction s, e.g. to re vers ible machines. U ni ve r - sality has also been provi ded for rev ersible and conserv ativ e SM Durand-Lose (2006). W e belie ve that the CTS simulation could be turned re ve rsible with less than two extra meta-s ignals . One ke y feat ure of A G C is that the contin uous space and time can be u sed to pr oduce accumulat ions and on top of it to do black hole computations (an accumulatio n contain ing a w hole, poten tially infinite, T uri ng computa tion). One may wond er about the minimal number of meta-signals for an accumula tion and for the black hole ef fect. Let us note that 4 signals is enoug h to make an accumulati on and 3 might to be enoug h, whereas 2 is not. It also seems that the black hole ef fect can be added to the cycl ic tag system simulation with a few ex tra meta-sign als. Refer ences Baiocchi, C. (2001). Th ree small un iv ersal Tur ing machines. In Machines, Co mputation s, and Univers ality , volume 2055, pages 1–10. Springer . Cook, M. (2004 ). Universality in elementary cellular autom ata. Co mplex Systems , 15:1–4 0. Durand- Lose, J. (2005 a). Abstract geometr ical compu tation for black ho le comp utation ( extended abstrac t). In Margenstern, M., editor, Machines, Computations, and Universality (MCU ’0 4) , numb er 3354 in LNCS, p ages 176–1 87. Springer . Durand- Lose, J. (2005b). Abstract geometrica l compu tation: Tu ring compu ting ability and undecidability . I n Cooper, B. S., L ¨ owe, B., and T oren vliet, L., editors, Ne w Computation al P aradigms, 1st C onf. Computability in Eur ope (CiE ’05) , number 3526 in LNCS, pages 106–116 . Springer . Durand- Lose, J. (200 6). Re versible conservativ e r ational ab stract geom etrical computatio n is Tur ing-universal. In Beckmann , A. and Tucker , J. V ., editor s, Logical Ap pr oaches to Computatio nal Barriers, 2n d Con f. Com- putability in Eur ope (CiE ’06) , number 3988 in LNCS, pages 163–172. Springer . Durand- Lose, J. (2 009a). Ab stract geometrical co mputation 3: Black holes f or c lassical an d an alog c omputing . Natural computing . to appear . Durand- Lose, J. (2009 b). Cellular automata, Univ ersality o f. In Meyers, R. A. and Adamatzky , A., edito rs, Encyclope dia of Complexity and System Science . Springer . to appear . 80 Small T uri ng uni ve rsal signal machines K orec, I. (1996 ). Small universal register machines. Theor et. Comp. Sci. , 168(2):26 7–30 1. Kudlek, M. (1996). Small determin istic turing machines. Theoret. C omp. Sci. , 168 (2):24 1–255 . Margenstern, M. (1 995). Non- erasing Turing m achines: A new fr ontier between a decidable halting p roblem and universality . I n Baeza-Y ates, R., Goles, E., and Po blete, P ., edito rs, LATIN’95 , num ber 9 11 in LNCS, p ages 386–3 97. Springer . Neary , T . an d W oods, D. (2006a ). P-completeness of c ellular au tomaton rule 110. I n Bugliesi, M., Pren eel, B., Sassone, V ., and W egener , I., editors, In ternational Colloqu ium on A utomata Languages and Pr ogramming (ICALP ’06) , numbe r 4051( 1) in LNCS, pages 132 –143. Springer . Neary , T . and W oo ds, D. (2006b) . Small fast universal Turing machines. Theor et. Comp. Sci. , 362(1–3 ):171– 195. Ollinger, N. (2002). The quest for small universal cellu lar automata. In ICALP ’02 , numbe r 2380 in LNCS, pages 318–3 29. Springer . Ollinger, N. ( 2008) . Univ ersalities in cellular a utomata: a (sh ort) survey . In Durand, B., editor , Journ ´ ees Automates cellulair es (J A C ’08) , pages 102–118 . Richard, G. an d Olling er , N. (2008) . A par ticular universal cellular automaton . I n Neary , T ., W oods, D., Seda, A. K., and Murph y , N., editors, The Complexity of Simple Pr ograms . National Uni versity of Ireland, Cork. (This volume). Rogozhin , Y . V . (1982) . Sev en uni versal T uring machines. I n Systems and theor etical pr ogramming , number 63 in Mat. Issled., pages 76–90 . Academia Nauk Moldavskoi SSR. in Russian. Rogozhin , Y . V . (19 96). Small universal T uring machines. Theoret. C omp. Sci. , 168 (2):21 5–240 . Smith, A. (200 7). Un i versality of Wolframs 2, 3 Turing machine. Comp le x Systems . to appe ar . W ood s, D. and Neary , T . (2006) . On the time complexity of 2- tag systems and small universal Turing machines. In 4 7th Annual IEEE Symposium o n F o undatio ns of Compute r Scienc e (FOCS ’06), Berkele y , CA, USA , pages 439–4 48. IEEE Compute r Society . W ood s, D. and Neary , T . (20 09). Small semi-weakly universal Turing machines. Fun damenta Informaticae , 91(1) :179-1 95, 20 09.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment