작은 튜링 완전 신호 기계의 설계와 구현
본 논문은 추상 기하학적 계산(AGC) 모델인 신호 기계(SM)를 이용해 가능한 가장 작은 형태의 튜링 완전성을 달성한다. 티uring 기계, 셀룰러 오토마톤, 순환 태그 시스템을 각각 시뮬레이션하는 방법을 제시하고, 최종적으로 메타‑시그널 13개와 충돌 규칙 21개만으로 멈춤을 지원하는 보편적 신호 기계를 설계한다.
저자: Jer^ome Dur, -Lose
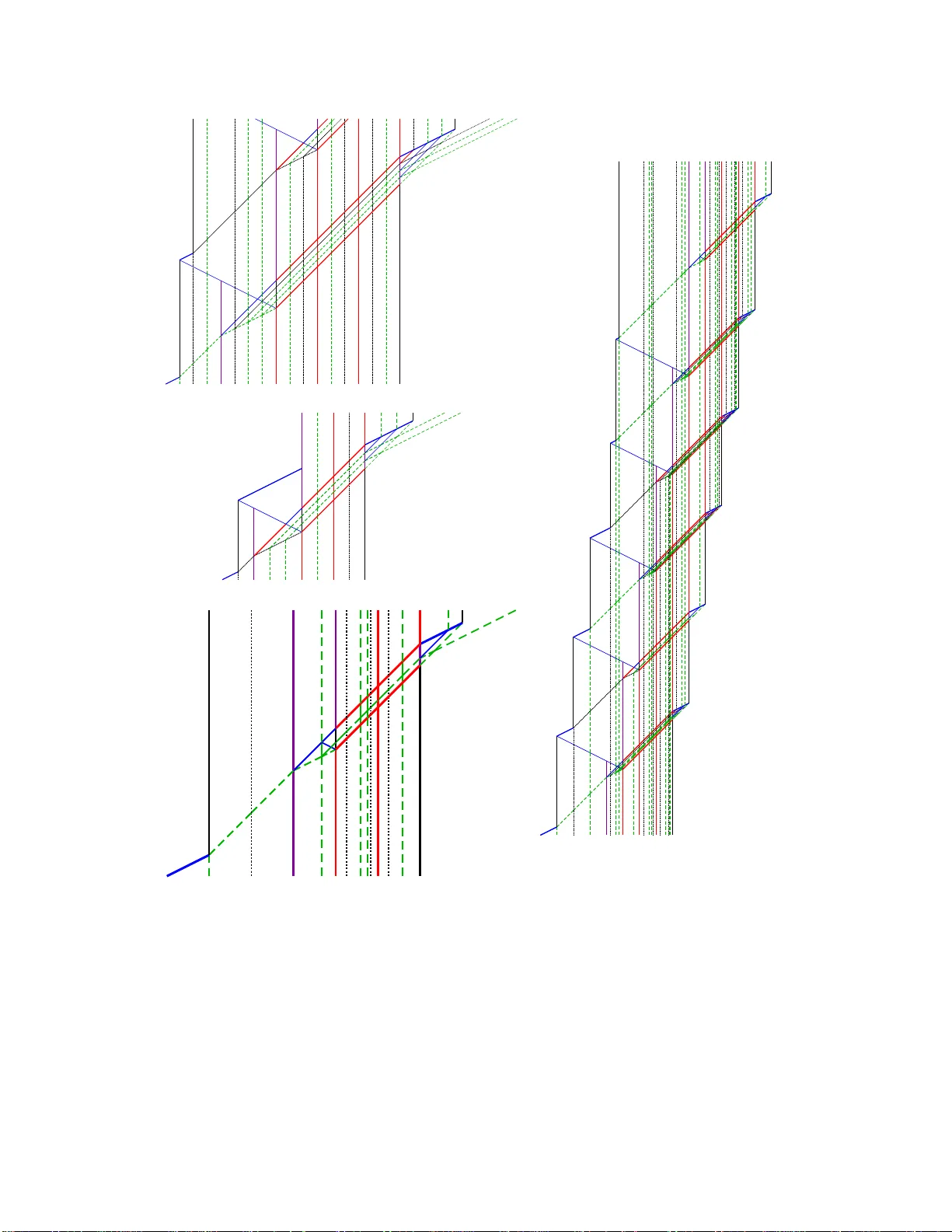
본 논문은 추상 기하학적 계산(AGC)이라는 연속적인 시공간 모델 안에서 신호 기계(Signal Machine, SM)를 정의하고, 가능한 가장 작은 형태의 튜링 완전성을 달성하는 방법을 체계적으로 탐구한다. 먼저 SM 은 메타‑시그널(M)이라는 유한 집합, 각 메타‑시그널에 할당된 실수 속도(S: M→ℝ), 그리고 두 개 이상 시그널이 충돌했을 때 발생하는 결과 시그널 집합(R)으로 구성된 (M, S, R) 삼중쌍으로 정의된다. 충돌 규칙은 결정론적이며, 충돌 전후에 동일한 위치·시간에 존재하는 시그널은 반드시 규칙에 명시된 메타‑시그널만이다. 이러한 정의는 전통적인 튜링 기계, 셀룰러 오토마톤, 순환 태그 시스템 등 다양한 이산 모델을 연속적인 시공간 다이어그램으로 매핑할 수 있는 기반을 제공한다.
시간 복잡도는 충돌 인과 그래프에서 가장 긴 경로의 길이로 측정한다. 이는 전통적인 단계 수와 일대일 대응하며, 공간 복잡도는 동시에 존재하는 시그널 수(또는 반체인 길이)로 정의될 수 있다. 논문은 “작음”을 메타‑시그널 수와 실제 정의된 충돌 규칙 수 두 가지 척도로 평가한다. 메타‑시그널이 m 개이면 가능한 충돌 조합은 2^m − m − 1 개이지만, 실제 설계에서는 대부분의 조합을 사용하지 않으며, 규칙 수는 보통 메타‑시그널 수보다 훨씬 작다.
다음으로 저자는 세 가지 기존 계산 모델을 SM 로 변환하는 구체적인 방법을 제시한다.
1. **튜링 기계 시뮬레이션**
- 각 테이프 기호당 하나, 각 상태당 두 개의 메타‑시그널을 할당하고, 테이프 확장을 위해 4개의 보조 시그널을 추가한다.
- 전이 테이블의 각 항목에 대해 두 개의 충돌 규칙이 필요하므로, 전체 규칙 수는 전이 수에 비례한다.
- 기존 연구에서 2‑counter 기계 기반 시뮬레이션은 지수 시간 완전성을 제공하지만 메타‑시그널 수가 많다.
- Neary‑Woods의 다항 시간 튜링 기계 변환을 적용해 18개의 메타‑시그널과 62개의 규칙으로 다항 시간 완전성을 달성한다.
- 더욱 극단적으로는 2‑상태 3‑심볼 튜링 기계를 이용해 7개의 메타‑시그널과 6개의 규칙으로 반완전(반무한) 시뮬레이션이 가능함을 보인다.
2. **셀룰러 오토마톤 시뮬레이션**
- 1‑차원, 반경 1 CA 를 대상으로 하며, 각 셀 상태 s 에 대해 세 개의 시그널 s_L (속도 −1), s (속도 0), s_R (속도 +1)를 배치한다.
- 인접 셀 간의 상호작용은 충돌 규칙 {s_R, t, u_L} → {v_L, v, v_R} 로 구현한다. 여기서 f(s, t, u)=v 는 CA 의 로컬 함수이다.
- 이 방식은 CA 의 동시 업데이트를 시공간 다이어그램 상의 교차점으로 변환하여, 연속적인 신호 이동과 충돌을 통해 동일한 계산을 수행한다.
- 예시로 rule 110 을 6개의 메타‑시그널과 8개의 규칙으로 반완전 시뮬레이션한다. 그러나 멈춤을 정의하려면 추가적인 신호와 규칙이 필요하다.
3. **순환 태그 시스템(CTS) 시뮬레이션**
- CTS 는 이진 단어와 순환 리스트(앱펜던트)로 구성되며, 매 사이클마다 첫 비트를 삭제하고, 비트가 1이면 현재 리스트의 첫 앱펜던트를 단어 끝에 추가하고 리스트를 회전한다.
- 저자는 단어를 0·1 시그널(속도 0)로, 리스트를 이동 신호(go_LL, go_RR 등)와 구분자(sep)로 인코딩한다.
- 리스트 회전은 go_LL 신호가 마지막 신호를 지우고 반대 방향으로 이동하면서 이루어지며, 각 단계마다 정확히 하나의 충돌이 발생한다.
- 이 설계는 기존 CTS 기반 튜링 기계 시뮬레이션보다 메타‑시그널 수가 현저히 적으며, 다항 시간 완전성을 유지한다.
위 세 가지 변환 중 가장 효율적인 CTS 기반 접근을 채택해, 논문은 **13개의 메타‑시그널**과 **21개의 충돌 규칙**만으로 멈춤을 지원하는 보편적 신호 기계를 설계한다. 멈춤은 특정 메타‑시그널(예: halt) 이 더 이상 충돌을 일으키지 않을 때 자동으로 발생하도록 정의된다. 이 기계는 튜링 완전성을 보장하면서도, 기존에 알려진 가장 작은 신호 기계(예: 30개 이상의 메타‑시그널)보다 현저히 간결하다.
논문의 주요 기여는 다음과 같다.
- SM 의 형식적 정의와 시간·공간 복잡도 측정 방법을 명확히 제시.
- 튜링 기계, CA, CTS 를 각각 SM 로 변환하는 구체적인 설계 원칙을 제시하고, 메타‑시그널 및 규칙 수를 최소화하는 최적화 기법을 도입.
- CTS 기반 변환을 통해 13개의 메타‑시그널, 21개의 규칙으로 멈춤을 지원하는 튜링 완전 신호 기계를 최초로 구현, “작음”에 대한 새로운 하한을 제시.
- 메타‑시그널 속도 차이를 이용한 구분, 충돌 전후 신호 보존, 최소 보조 신호 사용 등 일반적인 설계 원칙을 제시함으로써 향후 복잡한 연산(병렬 알고리즘, 비결정적 시뮬레이션)에도 적용 가능한 프레임워크를 제공한다.
결론적으로, 본 연구는 연속적인 기하학적 모델인 신호 기계가 전통적인 이산 계산 모델과 동등한 계산 능력을 가짐을 증명함과 동시에, 메타‑시그널과 충돌 규칙의 수를 최소화함으로써 “작은” 튜링 완전 시스템의 설계 가능성을 열어준다. 이는 계산 이론, 형식 언어, 그리고 물리적 구현(광학, 전자기 파동 등) 등 다양한 분야에서 새로운 연구 방향을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기