From Altruism to Non-Cooperation in Routing Games
The paper studies the routing in the network shared by several users. Each user seeks to optimize either its own performance or some combination between its own performance and that of other users, by controlling the routing of its given flow demand.…
Authors: ** - Amar Prakash Azad (INRIA, 프랑스) - Eitan Altman (INRIA, 프랑스) - R. El‑Azouzi (Université d’Avignon
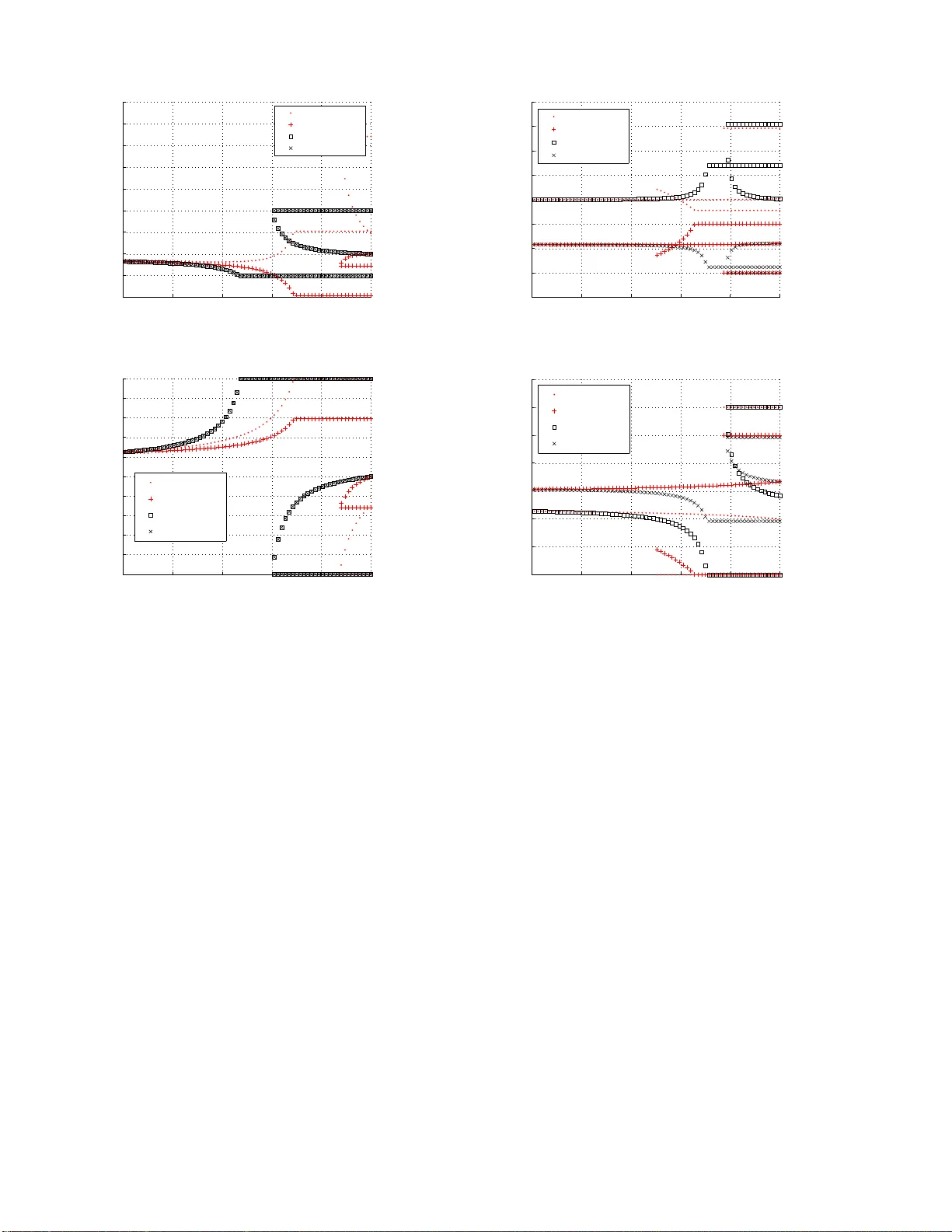
From Altruism to Non-Cooperation i n Routing Games Amar Prakash Az ad ∗ + , Eitan Altman ∗ and R. El-Azouzi + ∗ Maestro group, INRIA, 2004 Route d es Lucioles , Sophia Antipolis, France + LIA, University of A vignon, 33 9, chemin des Meina jaries, A vignon , France { amar .azad,e itan.altman } @sophia.inria.fr , rachid.elazo uzi@univ-a v ignon.fr . Abstract — The paper stud ies the routing in th e network shared by sev eral users. Each user seeks to optimize either its own perfo rmance or some combination between its o wn p erf ormance and that of other users, by controlling the routing of its giv en flow demand. W e parameterize the degree of cooperation which allows to cover the fully non-cooperativ e beha vior , the f ully cooperative behavio r , and even mor e, the fully altruistic beha vior , all these as special cases of the parameter’ s choice. A large part of the work consists in ex ploring t he impact of the degree of cooperation on the equilibriu m. Ou r first finding is to i dentify multiple Nash equilibria with c ooperativ e behavior that do not occur in the non-cooperativ e case under the same conditions (cost, d emand and topology). W e then identify Braess like paradox (in which adding capacity or addin g a li nk to a network results in worse perfo rmance to all u sers) in presence of user’ s cooperation. W e identify another type of paradox in cooperation scenario: when a giv en user in creases its degree of cooperation while other users keep unchanged their d egre e of cooperation, thi s may lead to an impro vement in perfor mance of that giv en user . W e then pu rsue the exploration and carry it on to the setting of Mixed equil ibrium (i.e. some users are non atomic-they h a ve infinitesimally small demand, a nd other ha ve finite fixed demand). W e finally obtain some t heoretical r esults that show that for low degree of cooperation the equil ibrium is uniq ue, confirming th e results of our numerical stu dy . I . I N T RO D U C T I O N Non-coo perative routing has long been s tudied both in the fr amew ork of road -traffic as well as in the framework of teleco mmunica tion networks. Su ch frameworks allow to model the flow c onfiguratio n that results in networks in which routing decision s are m ade in a non-co operative and d is- tributed manner between th e users. In the case of a fin ite (not very large) nu mber of agents, the resulting flow configu ration correspo nds to the so called Na sh equilibr ium [17] defin ed as a situation in which n o agent h as an incentive to deviate unilaterally . The Nash equilibriu m has been extensi vely used in tele commun ications, see e.g. [2], [6]. Th e autho rs in [2 ] studied a routing games in which each user has a gi ven amount o f flow to sh ip and has se veral paths th rough which he m ay split that flow . Such a ro uting game m ay be handle d by mo dels similar to [ 8] in the special case of a topolog y of para llel links. This typ e of top ology is studied in detail in the first part of [ 2] a s well as in [9]. Howe ver , the model of [8] does not extend directly to othe r topo logies. In deed, in more g eneral to pologies, the delay over a p ath d epends on how m uch traffic is sent b y other users on any other path that shares common lin ks. Rou ting ga mes with genera l topolo gies have been stud ied, for example, in the second part of [2], as well a s in [9]. A re lated mo del was studied thirty years ago by Rosenthal in [1 0], y et in a discrete setting. It is sh own that in such a model there always exists a pure stra tegy Nash equilibriu m. He introdu ces a k ind of discrete p otential function for comp uting the equilibriu m. Ne vertheless if a player h as more than 1 unit to ship such an eq uilibrium d oesn’t always exist. In this work, we embark on expe rimental inves tigation of the impact of co operation in the co ntext of rou ting ga mes. In particular we consider parallel links an d lo ad b alancing network topology for inv estigation, o riginally presented in [2] and [7] in the co ntext o f selfish users. The experimentation is mainly aimed at exploring so me strange b ehaviors which appears in presence of user’ s par tial co operation (Cooperatio n in De gree), which is fu rther strengthened with some theoretical results. Firstly , we id entify loss of uniquen ess of Nash equilibria. W e show by a simple example of parallel links and load balancing network that there may exist several suc h equi- libria. Moreover, even the uniqu eness o f link utilization a t equilibria may fail ev en in the case of simp le top ology . A similar example of parallel links, in ab sence of the coop eration between users there would b e a sing le equilibriu m [2]. Beyond Nash equilibrium we in vestigate further in the setting o f Mixed u sers i.e. wh ere there are two typ es of u sers, Group user and Individual u sers. Grou p users seek Nash equilib rium while the Ind i vidual users seek equ ilibrium with W ardrop condition s. Strength ening our earlier finding, we observe loss of uniqueness with partial coo peration ag ainst the unique solutions shown in [15] for selfish users. Howe ver in the latter section (Sec. V) , we show the oretically that there exist uniquen ess of Nash equilibr ium under som e co nditions in the presence of cooperatio n between u sers. Secondly , we iden tify parado xical b ehavior in pr esence of such coo peration . On e of the observed parad ox here is a kind of Braess paradox , a well studied paradox in routing context. Braess paradox h as attracted a ttention of m any re searchers in context of rou ting games especially related to upg rading the system, see [4] - [7]. Th e famou s Braess para dox tell us that increasing resourc es to the sy stem leads to degraded pe rfor- mance in some cases. Su ch paradox is originally s hown to exist in many scenar ios, e .g. Braess n etwork in [5], Load balanc ing network in [7 ]. Altho ugh such pa radoxes are foun d even in the case of selfish u sers earlier , th eir existence even in case of such partial coo peration is highlighte d here. W e show that as the link capacity increases the overall cost of a user d ecreases i.e. addition of resources in the system can tentati vely lead to degraded per forman ce. Even more, we also identify another kind of paradox related to degr ee of Coop eration : When a user in creases its degree of coop eration while o ther users keep their degree of coo peration unchan ged, leads to perf ormance improvement of that user . W e also ob serve similar behavior ev en when other user also incre ase their degree of cooperation. The paper is structured as f ollows : I n section II, we pr esent the system mo del, d efine ou r fr amew ork of coop erativ e user and, f ormulate the p roblem. Fur ther in section III we detail the n umerical investigation and summarize the find ings. Based on one of the findin gs, we depict more examples identify ing Braess pa radox in th e setting o f Nash game in subsection III-C. In section IV, mixed equilibrium is illustrated. In section V, we develop theor etical results to sho w the conditions where un iqueness can be established in presence of u sers cooper ation. In sectio n VI we summarize the study of impact of cooper ation. I I . S Y S T E M M O D E L W e consider a network ( V , L ) , where V is a finite set of nodes a nd L ⊆ V × V is a set of directed link s. For simplicity of notation a nd witho ut loss of generality , we assume that at m ost one link exists b etween e ach pair o f nodes (in each direction) . For any link l = ( u, v ) ∈ L ,define S ( l ) = u an d D ( l ) = v . Considerin g a no de v ∈ V , let In ( v ) = { l : D ( l ) = v } den ote the set o f its in-goin g links, and Out ( v ) = { l : S ( l ) = v } the set of its o ut-goin g links. A set I = { 1 , 2 , ..., I } o f users shar e th e n etwork ( V , L ) , where each source nod e acts as a user in o ur fr ame work. W e shall assume th at all users sh ip flow f rom source node s to a common d estination d . Each u ser i has a th rough put demand that is some p rocess with average rate r i . User i splits its demand r i among the paths connec ting th e so urce to th e destination, so as to optimize so me individual perfo rmance objective. Let f i l denote the expected flow that user i sends on link l . T he u ser flow config uration f i = ( f i l ) l ∈L is called a rou ting strategy of user i . The set of strategies of user i that satisfy th e u ser’ s d emand and preserve its flow at all node s is called the strategy space o f user i and is d enoted by F i , that is: F i = { f i ∈ R |L| ; X l ∈ Out ( v ) f i l = X l ∈ In ( v ) f i l + r i v , v ∈ V } , where r i s = r i , r i d = − r i and r i v = 0 for v 6 = s , d . The system flow configu ration f = ( f 1 , ..., f I ) is ca lled a r ou ting strate gy pr ofile and takes values in the product strategy space F = ⊗ i ∈I F i . The objective of each user i is to find an admissible routing strategy f i ∈ F i so as to minimize some perfo rmance objective, or cost f unction, J i , that depe nds upon f i but also upon the routing strategies of other u sers. Hence J i ( f ) is the cost of user i und er routing strategy pro file f . A. Nash equilib rium Each user in this frame work minimizes his o wn cost function s which leads to th e conc ept of Nash equilibr ium. Th e minimization pro blem here depends o n th e rou ting d ecision of other users, i.e., their routin g strategy f − i = ( f 1 , ..., f i − 1 , f i +1 , ... f I ) , Definition 1 A vecto r ˜ f i , i = 1 , 2 , ..., I is ca lled a Nash equilibrium if for ea ch user i , ˜ f i minimizes the co st fu nction given th at other users’ r ou ting decisio ns are ˜ f j , j 6 = i . In other wor d s, J i ( ˜ f 1 , ˜ f 2 , ..., ˜ f I ) = min f i ∈ F i J i ( ˜ f 1 , ˜ f 2 , ..., f i , ..., ˜ f I ) , i = 1 , 2 , ..., I , (1) wher e F i is the r ou ting strate gy space of user i . Nash equilibrium has been discussed in the context of non-co operative g ame with selfish users quite o ften in recent studies. In this paper we stud y a ne w aspect of cooperative ro uting games where some user s cooperate with the system taking into account the perfo rmance of o ther users. W e define th is de g r ee of Cooperation as follows : Definition 2 Let − → α i = ( α i 1 , .., α i |I | ) be the degre e o f Cooper- ation fo r u ser i . The new ope rating c ost fu nction ˆ J i of user i with De gr ee of Cooperation, is a conve x combina tion of the cost of user fr om set I , ˆ J i ( f ) = X k ∈I α i k J k ( f ); X k α i k = 1 , i = 1 , ... |I | wher e ˆ J i ( f ) is a function o f system flow config uration f with cooperation. Based on the degr ee of Cooperation vector, we can view the following p roperties for user i , • Non coopera ti ve user : if α i i = 0 . • Altruistic user : User i is fully co operative with all users and does not care for his ben efits, i.e., α i i = 1 . • Equally cooperative - if α i j = 1 |P | , user i is equ ally cooper ati ve with each user j , where j ∈ P , P ⊆ I . Note that the new operating cost fun ction of a user is the perfor mance measure with de gr ee o f Cooperation , where it takes into accoun t the cost of o ther users. Althoug h a u ser cooper ating with the system, it attem pts to minimize its own operating cost f unction in the game setting. Hence such frame work can b e classified und er non- cooper ati ve games an d the thus we can benefit to apply the properties of non-coo perative games in such scenario. 1 2 3 r 1 r 2 l 3 l 4 l 1 l 2 (a) L oad balancin g 2 1 l 1 l 2 r 1 r 2 (b) P aralle l links Fig. 1. Network T opology I I I . N U M E R I C A L I N V E S T I G AT I O N O F T H E RO L E O F C O O P E R A T I O N In this section we d etail some numerical examples to study the r outing game in the pre sence of co operation b etween some users. I n the se examp les, we use two typ es of cost fun ctions : linear functio n which is o ften u sed in the transpor tation network an d M/M/1 function wh ich is used in the q ueuing networks. W e consider two network to pologies : parallel links [2] and load balancing networks [6] which are defined below Load Balan cing Network : A simple load balanc ing topology of network G consists of 3 nodes is depicted in Fig. 1(a). This top ology has b een widely studied in context of queuin g networks. The nodes a re number ed 1 , 2 , 3 and com munication links amon g them are nu mbered as l 1 , l 2 , l 3 , l 4 . No de 1 , 2 acts as source nod e and nod e 3 acts as destinatio n node. Link l 1 , l 2 are direc ted links f or no des 1 , 3 an d nod es 2 , 3 where as, link l 3 , l 4 are dire cted link for no des 1 , 2 and no des 2 , 1 . Cost fu nction of user i is the sum o f cost of each link J i = P l ∈{ 1 ,... 4 } f i l T l ( f l ) , where T l ( f l ) is the lin k co st function . The cost of each user i with c ooperatio n c an be defined as below , ˆ J i = X l ∈{ 1 ,... 4 } X k ∈{ 1 , 2 } α i k f k l T l ( f l ) (2) P arallel Links Network : A simple para llel links top ology of network G co nsists of 2 no des is depicted in Fig. 1(b) which is originally discuses in [ 2]. The no des ar e num bered 1 , 2 and commun ication links between them are numbere d a s l 1 , l 2 . Node 1 ac ts as source no de and nod e 2 acts as destination node. Cost functio n of user i is the sum o f cost of each link J i = P l ∈{ 1 , 2 } f i l T l ( f l ) , where T l ( f l ) is the lin k c ost function . The cost of each user i with c ooperatio n c an be defined as below , ˆ J i = X l ∈{ 1 , 2 } X k ∈{ 1 , 2 } α i k f k l T l ( f l ) (3) For each network to pology , we consider both the cost fun ctions for in vestigation. Linear Cost Function : Linear link cost f unction is defin ed as, T l ( f l i ) = a i f l i + g i for link i = 1 , 2 , wh ere as, T l ( f l j ) = cf l j + d f or link j = 3 , 4 . M/M/1 Dela y Cost Functio n : The link co st fun ction can be defined as, T l ( f l i ) = 1 C l i − f l i , where C l i and f l i denote the total capacity and total flo w of the lin k l i . Note that this co st represents the av erage expected delay in a M/M/1 queue with exponentially distributed inter arriv al time s and service times under various regimes su ch as the FIFO (First In First Out) regime in which cu stomers are served in the or der of arrivals, the PS (Pr ocessor sharing) r egime and the LIFO ( Last In First Out) regime. This same cost describes in fact the expected av erage delays in o ther settings as we ll such as th e M/G/1 queue (expon entially distrib uted inter ar riv al times and g eneral indepen dent service times) under the PS or the LIFO regime. A. Numerical Examples W e consider two u sers share a network. W e distinguish two cases. An asymmetric case in which the user 1 is co operative with α 1 1 > 0 and user 2 is noncoo perative, i.e., α 2 2 = 0 . The second case is symme tric case in which both users are cooperative with the same d egree of coop eration α . W e compute the Nash eq uilibrium at sufficiently m any po ints of de gr e e of Cooperation α in the interval [ 0,1] a nd plo t the correspo nding user cost an d user flow . Here user flow sign ifies the f raction of demand flowing in the correspo nding user destination lin k. Since we con sider only two link s, the fra ction of de mand flow in one rou te comp lements that of the o ther route. Hence we plot the fra ction of demand corre sponding to the user, i.e., f 1 l 1 for user 1 and f 2 l 2 for user 2 . In sequel we describe fi ve experiments as follows: Experiment 1) Load balancing network w ith linear link cost : In Fig. 2(a)-2(b), we p lot th e cost and the flow obtained at Nash equilibriu m versus α in the r ange [0 , 1]. Note tha t th e plot of user 1 and 2 overlap in the figure in symmetrical case. This is due to the same d egree o f Cooperation. Experiment 2) P arallel links with linear link cost : In Fig . 3(a),3(b), we plot the co st f unction and the flow fo r bo th u sers obtained at Nash equilibriu m f or α in the range of [0 , 1]. Experiment 3) Loa d b alancing network with M/M/1 link cost : Con sider the p arameters for the lin k cost f unctions as, a 1 = 4 , g 1 = 1 , a 2 = 2 , g 2 = 2 , r 1 = 1 . 2 , r 2 = 1 . In Fig. 4(a),4(b), we plo t cost and flo w o btained at Nash equilibrium for 0 ≤ α ≤ 1 . Experiment 4) P a rallel links with M/M/1 link cost : In Fig. 5(a),5(b), we plot the co st f unction and the flow fo r bo th u sers obtained at Nash equilibriu m versu s α . Experiment 5) Load balancing network w ith linear link cost : W e v ary th e link cost fo r l 3 and l 4 by varying the parameter c . More precisely , we increase c f rom 0 to 1000 in the steps of 20 and co mpute Nash eq uilibrium at e ach point. I n Fig.6, we plot the cost of each user with the in creasing link cost of the link l 3 and l 4 . Note that wh en the link cost is high signifies that link do esn’t exit. W e analyze the results obtained f rom the experimenta tion done ab ove. W e will b e using α and α 1 alternatively h ere fo r simp licity as we have fixed α 2 = 1 for asymmetrical case and α 1 = α 2 for symmetr ical case. The importan t b ehavior ca n b e su mmarized un der following two heading s. B. Non uniqu eness of Nash equilibrium In Fig. 2, we observe that there exist multiple Nash equilibria for both sym metrical c ase a nd a symmetrical case. 0 0.2 0.4 0.6 0.8 1 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 Nash Euilibrium Degree of Cooperation( α ) Cost J 1 −Asymmetrical J 2 − Asymmetrical J 1 −Symmetrical J 2 − Symmetrical (a) Cost at NEP 0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Nash Euilibrium Degree of Cooperation( α ) Flow f 1 1 −Asymmetrical f 2 2 − Asymmetrical f 1 2 −Symmetrical f 2 2 − Symmetrical (b) Flo w v alues at NEP Fig. 2. T opology : Load balancing, Cost functio n : Linear , Paramet ers : a = 1 , c = 0 , d = 0 . 5 , Coope ration : { Symmetrical: α 1 = α 2 , Asymmetrical : 0 ≤ α 1 ≤ 1 , α 2 = 0 } . Note th at mu ltiple Nash equilibria is constrain ed to som e range of cooperatio n( α ). Howe ver the re a lso exist som e range of coop eration where uniq ue solution exist. W e obser ve that there exist thr ee Nash eq uilibrium fo r som e ran ge o f co - operation , two N ash equilibr ium at one p oint and , unique Nash equilibriu m fo r some ra nge of coo peration . In Fig. [4- 6](a,b) , w e ob tain multiple Nash equilibria as above for some range of co operation . In Fig. 3-5 although α 1 = α 2 , due to other param eter being n on-sym metrical, we do not ob serve a sy mmetrical plo t for ” J 1 , J 2 -Symmetrica l”. Uniq ueness of Nash equilibriu m is shown in [2] , f or a sim ilar situation as in Fig. 3 fo r selfish user, but we observe loss of uniqu eness when users have some co operation . C. Braess lik e pa radox W e also observe a Braess kind of p aradox which is re lated to perfor mance wh en additional resour ce is added to the system. T o un derstand this, con sider the topo logy of experimen t 1 , i.e., the load b alancing network top ology . Consider a con figuration where initially link l 3 and l 4 has very high cost (ef fectively doesn’t exist) and latter the lin k cost is reduce d to a lo w value e.g. c = 0 and d = 0 . 5 . This can be interpreted as an add itional 0 0.2 0.4 0.6 0.8 1 3.5 4 4.5 5 5.5 6 6.5 7 7.5 Nash Euilibrium Degree of Cooperation( α ) Cost J 1 −Asymmetrical J 2 − Asymmetrical J 1 −Symmetrical J 2 − Symmetrical (a) Cost functi on at Nash equilibriu m 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Nash Euilibrium Degree of Cooperation( α ) Flow f 1 1 −Asymmetrical f 2 2 − Asymmetrical f 1 2 −Symmetrical f 2 2 − Symmetrical (b) Flo w v alues at Nash equili brium Fig. 3. T opology : Parall el links, Cost funct ion : L inear , Parameters : a = 1 , c = 0 , d = 0 . 5 , Coop eratio n: { Symmetric al: α 1 = α 2 , As ymmetrica l: 0 ≤ α 1 ≤ 1 , α 2 = 0 } . resources added to th e sy stem. Observe tha n for the initial configur ation the cost of user 1 is J 1 = 1 and cost of user 2 is J 2 = 1 in experim ent 1. Howe ver in the latter configur ation which is depic ted in Fig . 2(a), we o bserve th e cost of user 1 and 2 is g reater that 1 at Nash equilibr ia. Th is explains degradation of perf ormance when resources are in creased. A very clearer observation can be mad e in Fig.6 where the link cost for link l 3 and l 4 is par ameterized. Due to m ultiple Nash equilibria we see two curves. The lo wer cur ve correspo nds to Nash so lutions whe re flow for each user choose d irect link to destination while the upper curve correspon d to mixed strategy solution wh ere a fraction o f flow for each user ch oose dire ct link pa th. Notice that user c ost is improvin g as the link cost is increasing f or the upper curve. Suc h pa radox is widely stu died as Braess paradox in many literature. Above we identified the existence o f Braess parado x in load balancin g network. Now we iden tify the Braess paradox in parallel links topo logy . Consider the para meters as follows, C l 1 = 4 . 1 C l 2 = 4 . 1 r 1 = 2 r 2 = 1 . Consider the scenario when initially the lin k l 3 , l 4 does not exist, while latter they are ad ded in the system. In other words, th e initially the capacity C 3 = 0 , C 4 = 0 , an d latter it is C 3 = 10 , C 4 = 10 . Note that when C 3 = 0 , C 4 = 0 , 0 0.2 0.4 0.6 0.8 1 0.35 0.4 0.45 0.5 0.55 0.6 0.65 Nash Euilibrium Degree of Cooperation( α ) Cost J 1 −Asymmetrical J 2 − Asymmetrical J 1 −Symmetrical J 2 − Symmetrical (a) Cost functi on at Nash equi librium 0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Nash Euilibrium Degree of Cooperation( α ) Flow f 1 1 −Asymmetrical f 2 2 − Asymmetrical f 1 2 −Symmetrical f 2 2 − Symmetrical (b) Flo w v alues at Nash equili brium Fig. 4. T opology : Load bala ncing, Cost function : M/M/1 Delay , Parameters : C l 1 = 4 . 1 , C l 2 = 4 . 1 , C l 3 = 5 , C l 4 = 5 , r 1 = 1 , r 2 = 1 , Cooperati on: { Symmetrical : α 1 = α 2 , Asymmetrical: 0 ≤ α 1 ≤ 1 , α 2 = 0 } . flow at Nash eq uilibrium is trivially f l 1 = 1 , f l 2 = 1 . In the following, we consider two scenario s o f degree of cooperation : Only one user is Cooperative : The degree of Cooperatio n taken in this case is α 1 = 0 . 93 , α 2 = 0 . On inc reasing the cap acity C 3 , C 4 from 0 → 1 0 , the cost f unctions at Nash equilibrium are obtained as J 1 = 0 . 952 → 2 . 06 , J 2 = 0 . 322 5 → 0 . 909 and the flows are f l 1 = 2 → 0 , f l 2 = 1 → 0 . 0951 . W e also obtain ano ther Nash equ ilibrium where the cost fu nctions and the flow doesn’t change fro m initial state. Note that incre asing th e capacity in the network degrades the performan ce at the first Nash equ ilibrium. Both users ar e Cooperative : W e r epeat the above ex- periment with th e degree of Coo peration α 1 = 0 . 9 , α 2 = 0 . 9 . T he cost fun ctions at Nash e quilibrium ar e o btained as J 1 = 0 . 952 → 1 . 24 7 , J 2 = 0 . 3225 → 0 . 4 30 . W e again obtain ano ther Nash equ ilibrium wh ere the co st functio ns and th e flow do esn’t ch ange from initial state. Note th at again incr easing the capa city in the network degrades the perfor mance at th e first Nash equilibriu m. 0 0.2 0.4 0.6 0.8 1 0.109 0.11 0.111 0.112 0.113 0.114 0.115 Nash Euilibrium Degree of Cooperation( α ) Cost J 1 −Asymmetrical J 2 − Asymmetrical J 1 −Symmetrical J 2 − Symmetrical (a) Cost functi on at Nash equilibriu m 0 0.2 0.4 0.6 0.8 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 x 10 −3 Nash Euilibrium Degree of Cooperation( α ) Flow f 1 1 −Asymmetrical f 2 2 − Asymmetrical f 1 2 −Symmetrical f 2 2 − Symmetrical (b) Flo w v alues at Nash equili brium Fig. 5. T opology : Pa ralle l links, Cost functio n : M/M/1 Delay , Paramet ers : C l 1 = 0 . 001 , C l 2 = 0 . 001 , r 1 = 1 , r 2 = 1 , Cooper ation: { Symm etrica l: α 1 = α 2 , Asymmetrical: 0 ≤ α 1 ≤ 1 , α 2 = 0 } . D. P aradox in coop eration In Fig. 2(a), we o bserve that J 1 has higher cost than J 2 . This is intuitive because user 2 is selfish user while user 1 has a varying degree of Cooper ation. I n particular re mark th at α 1 ↓ 0 , J 1 ↑ J 2 . But this is no t true f or the who le r ange of Cooperation . Observe in Fig . ( 3.a) a non intuitive behavior f or some sm all r ange of α 1 (appro ximately α 1 ∈ (0 . 87 , 1) . Notice that when th e degre e of co operation α 1 increases (i.e . incr ease in its altruism) while oth er user be pu re selfish ( α 2 = 0) , lea ds to impr oved cost of user 1 . This is a p aradoxical behavior, we call it parado x in coopera tion . Th is parado x also exist in case of sy mmetrical cooperation (see J 1 -Symmetrical, J 2 - Symmetrical ) in th e rang e of α approxima tely ( 0 , 0 . 4 ). N otice that such parad ox is still o bserved in Fig. 3- 4. Remar k that such parado x exist only when ther e are multiple equilibria. I V . M I X E D E Q U I L I B R I U M The concep t o f mixed-equilibr ium (M .E.) has been intro- duced by Harker [14 ] (and further applied in [16 ] to a dyn amic equilibriu m and in [15] to a specific load balancin g problem). Harker has established the existence of the M.E ., characterized it thro ugh variational ineq ualities, and gave co nditions for its 0 200 400 600 800 1000 0.32 0.33 0.34 0.35 0.36 0.37 0.38 Nash Solution Link Cost for l 3 , l 4 Cost J 1 J 2 Fig. 6. T opology : Load balancing , Cost function : Linear , Parameters : a 1 = 4 . 1 , a 2 = 4 . 1 , d = 0 . 5 , Cooperatio n: α 1 = α 2 = 0 . 93 . uniquen ess. W e discuss here the b ehavior of mixed equilibrium in presence o f p artial co operation . Consider the network ( V , L ) shared by two types o f u sers: (i) g r oup users (denoted by N ) : these users have to route a large am ount of job s; (ii) individua l users ; these users ha ve a single job to r oute throu gh the network form a gi ven sou rce to a gi ven destinatio n. There are in finitely many in dividual users. For simplicity , we assum e that all in dividual users have a co mmon source s and com mon destination d . Let P be the set of possible path s which go from s to d . Cost function - J i : F → [0 , ∞ ) is th e cost function for each user i ∈ N - F p : F → [0 , ∞ ) , is the cost function of path p for each individual u ser . The aim o f each user is to min imize its cost, i. e., for i ∈ N , min f i J i ( f ) and fo r ind i vidual user, min p ∈P F i p ( f ) . Let f p b e the amou nt o f individual u sers that choose path p . Definition 3 f ∈ F is a Mixed Equilibrium (M.E.) if ∀ i ∈ N , ∀ g i s.t. ( f − i , g i ) ∈ F , ˆ J i ( f ) ≤ ˆ J i ( f − i , g i ) ∀ p ∈ P , F ( p ) ( f ) − A ≥ 0; ( F ( p ) ( f ) − A ) f i ( p ) = 0 wher e A = min p ∈P F p ( f ) A. Mixed equ ilibrium in parallel lin ks In the following pro position, we provide some closed form of Mixed equilibrium in parallel links. Proposition 1 Consider parallel links network topology (F ig. 1(b)) and M/M/1 delay link cost function. Consider th at a Gr oup type user and Individu al type users ar e op erating in this n etwork. Th e mixed equilibrium strate g y ( f 1 ∗ l 1 , f 2 ∗ l 2 ) ca n be given exactly as follows, 1) When Both link is used at W ardr o p equilibrium: ( M 1 , N 1 ) if a 1 < M 1 < b 1 ; otherw ise (0 , − cc ) if r 1 < min “ r 2 + C 2 − C 1 , α ( C 2 − C 1 )+2 αr 2 2 α − 1 ” , ( r 1 , r 1 − c c ) if r 1 < min “ α ( C 2 − C 1 ) 1 − 2 α ,r 2 − ( C 2 − C 1 ) ” , wher e M 1 = − α ( C 2 − C 1 )+ r 1 (2 α − 1) 2(2 α − 1) , N 1 = ( C 1 − C 2 )(1 − α )+(2 α − 1) r 2 2(2 α − 1) , a 1 = max( − C 2 − C 1 2 − r 2 − r 1 2 , 0) , b 1 = min( − C 2 − C 1 2 + r 1 + r 2 2 ,r 1 ) , cc = − C 2 − C 1 2 − r 2 − r 1 2 , dd = − C 2 − C 1 2 + r 2 + r 1 2 , 2) When on ly one link ( 1 ) is used at W ar dr op equilibrium: ( M 2 , 0) if c 1 < M 2 < r 1 ; otherw ise ( c 1 , 0) if h ( r 1 ) > 0 , ( r 1 , 0) if h ( r 1 ) < 0 , wher e c 1 = max( − C 2 − C 1 2 − r 2 − r 1 2 , 0) and M 2 is the unique (if ther e e xists) r oo t of the quad ratic equation h ( x ) = ax 2 + b x + c = 0 in [ c 1 , r 1 ] . Th e coefficients of the qu adratic equ ation a r e a =(( C 1 − C 2 + r 2 )(1 − α ) − αr 2 ); b =( C 1 (1 − α )(2( C 2 − r 2 − r 1 ) +2( C 2 − r 2 ))+2 αr 2 C 1 ); c = C 1 (1 − α )[( C 2 − r 1 − r 2 ) 2 − C 1 ( C 2 − r 2 )] − αr 2 C 2 1 . 3) When only one link ( 2 ) is used by W ar dr op user: ( M 3 , r 2 ) if 0 < M 3 < d 1 ; otherw ise (0 , r 2 ) if h (0 ) > 0 , ( d 1 , r 2 ) if h (0) < 0 , wher e d 1 = min( − C 2 − C 1 2 + r 2 + r 1 2 , r 1 ) a nd M 3 is the unique r oot( if ther e exist) of the quad ratic equa tion g ( x ) = ax 2 + b x + c = 0 in [0 , d 1 ] . Th e co efficients of the quad ratic eq uation ar e a =(( C 1 − C 2 + r 2 )(1 − α ) − αr 2 ); b =( C 1 (1 − α ) (2( C 2 − r 2 − r 1 )+2( C 2 − r 2 ))+2 αr 2 C 1 ); c = C 1 (1 − α ) [( C 2 − r 1 − r 2 ) 2 − C 1 ( C 2 − r 2 )] − αr 2 C 2 1 . Proof: W e first state the gen eral co ndition fo r th e mixed equilibriu m to exist. Based on link uses, th ere are 3 scenarios when W ard rop condition s can be met for equilibriu m to exist. W e in dividually state eac h of them and then we establish the condition s fo r equilibria. For link cost to be finite th e link flow must satisfy the flow con straint f l 1 < C 1 , f l 2 < C 2 . From this we o btain the general co ndition r 1 + r 2 < C 1 + C 2 . Equilibria can be attained in the following conditions: 1) When both link is used b y W ar dr op u sers: W ardrop u sers utilize both th e link s, i.e., f 2 l 1 > 0 , f 2 l 2 > 0 , imp lies cost of b oth links are same, i.e., T l 1 ( f l 1 ) = T l 2 ( f l 2 ) (we use T l 1 ( f l 1 ) instead of F l 1 ( f l 1 ) from def. 3 ). Fro m T l 1 ( f l 1 ) = T l 2 ( f l 2 ) ⇒ f 2 l 2 = − cc + f 1 l 1 , 0 < f 1 l 1 < r 1 , and 0 < f 2 l 2 < r 2 imply that a 1 ≤ f 1 ∗ l 1 ≤ b 1 , where a 1 = max( cc, 0 ) , b 1 = min( dd, r 1 ) , cc = − C 2 − C 1 2 − r 2 − r 1 2 and dd = − C 2 − C 1 2 + r 2 + r 1 2 . Thus the n ecessary con ditions f or equ ilibrium to exist reduces to r 1 + r 2 > | C 1 − C 2 | by no ting cc < r 1 and dd > 0 . Thu s th e eq uilibrium strategy ( f 1 ∗ l 1 , f 2 ∗ l 2 ) is giv en by ( M 1 , N 1 ) if a 1 < M 1 < b 1 ; other w ise, (0 , − cc ) if r 1 < min “ r 2 + C 2 − C 1 , α ( C 2 − C 1 )+2 αr 2 2 α − 1 ” , ( r 1 , r 1 − c c ) if r 1 < min “ α ( C 2 − C 1 ) 1 − 2 α ,r 2 − ( C 2 − C 1 ) ” , where M 1 = − α ( C 2 − C 1 )+ r 1 (2 α − 1) 2(2 α − 1) , N 1 = ( C 1 − C 2 )(1 − α )+(2 α − 1) r 2 2(2 α − 1) . Note that J 1 ( f 1 l 1 , f 2 l 2 ) is strict conve x in the r ange 0 < f 1 l 1 < r 1 , 0 < f 2 ∗ l 2 < r 2 ( by definition of M/M/1 cost fun ction). It can be directly inf erred th at if the equilibriu m poin t ( M 1 , N 1 ) satisfies the conditio n a 1 < M 1 < b 1 , (it is an interio r point) there exist atmo st one equilibriu m. Otherwise whe n there is n o inter ior equilibriu m po int, there may exist equilibrium at f l 1 1 = 0 or f l 1 1 = r 1 , i.e at point (0 , − cc ) or at p oint ( r 1 , r 1 − cc ) (since T l 1 ( f l 1 ) = T l 2 ( f l 2 ) implies f 2 l 2 = − cc + f l 1 1 ). T he point (0 , − cc ) can be an equilibriu m poin t on ly when a 1 = max(0 , cc ) = 0 and J ′ 1 (0 , cc ) > 0 . This d irectly implies r 1 < r 2 + ( C 2 − C 1 ) , an d r 1 < α ( C 2 − C 1 )+2 αr 2 2 α − 1 respectively . Combinin g th ese, we get r 1 < min n r 2 + ( C 2 − C 1 ) , α ( C 2 − C 1 )+2 αr 2 2 α − 1 o . Follo wing th e similar steps we can d irectly obtain that point ( r 1 , r 1 − cc ) can be an equ ilibrium poin t when r 1 < min n α ( C 2 − C 1 ) 1 − 2 α , r 2 − ( C 2 − C 1 ) o . 2) When only one link (link 1 ) is u sed by W ar dr op user: In this ca se, W ard rop u sers utilize on ly link 1 , i. e., f 2 l 2 = 0 . This dir ectly implies T l 1 ( f l 1 ) ≤ T l 2 ( f l 2 ) ⇒ f 1 l 1 ≤ cc (from wardrop cond ition). Combin ing the above with positive flow co ndition 0 ≤ f 1 ∗ l 1 ≤ r 1 , we obtain 0 ≤ f 1 ∗ l 1 ≤ c 1 , where c 1 = min { cc, r 1 } . Since c 1 must be greater than 0 , the necessary condition for equilib rium to exist r educes to r 1 − r 2 ≥ C 1 − C 2 . Further the equilibriu m strategy ( f 1 ∗ l 1 , f 2 ∗ l 2 ) is given by ( M 2 , 0) if 0 < M 2 < c 1 ; otherw ise , (0 , 0) if h (0) > 0 , ( c 1 , 0) if h (0) < 0 , where M 2 is the uniq ue ro ot of quadratic eq uation h ( x ) = ax 2 + bx + c . Let x 1 = − b + √ D 2 a , x 2 = − b − √ D 2 a are the roots of the Quadr atic equation h ( x ) = 0 , where a = ( C 1 − C 2 − r 2 )(1 − α ) + αr 2 ; b = 2(1 − α )[( C 1 − r 2 )(2( C 2 − r 2 ) + r 1 )] + 2 αr 2 ( C 2 − r 1 ); c = (1 − α )( C 1 − r 2 )[( C 2 − r 1 ) 2 − ( C 2 − r 1 )( C 1 − r 2 ) − r 1 ( C 1 − r 2 )] + αr 2 ( C 2 − r 1 ) 2 ; D = b 2 − 4 ac. The quad ratic equa tion h ( x ) = 0 will ha ve uniqu e solution in the range 0 < f 1 l 1 < r 1 because J ′ 1 ( f 1 1 , 0) is strict conve x in the ran ge 0 < f 1 l 1 < r 1 ( by defin ition of M/M/1 cost fun ction). Hen ce there can be atmost one equilibriu m p oint satisfying 0 < M 2 < c 1 (i.e single interior point). Otherwise whe n there is n o inter ior equilibriu m po int, there may exist equilibrium at f l 1 1 = 0 or f l 1 1 = r 1 , i.e., at po int (0 , 0) or at point ( r 1 , 0 ). T he point (0 , 0) can be an equ ilibrium poin t o nly when J ′ 1 (0 , 0) > 0 , i.e., h (0) > 0 . Similarly point ( c 1 , 0 ) can b e e quilibrium point only when J ′ 1 (0 , 0) < 0 , i.e., h (0) < 0 . 3) When only one link ( 2 ) is used by W ar dr op user: In this case W ardro p users utilize only link 2 , i. e., f 2 l 2 = r 2 . Following the similar steps as before, we obtain d 1 ≤ f 1 ∗ l 1 ≤ r 1 , where d 1 = max { dd, 0 } . Since d 1 must be less than r 1 , the necessary con dition for e quilibrium to exist r educes to r 1 − r 2 ≤ C 2 − C 1 . Further the equilibr ium strategy ( f 1 ∗ l 1 , f 2 ∗ l 2 ) is given by ( M 3 , r 2 ) if d 1 < M 3 < r 1 ; otherw ise (0 , r 2 ) if h ( r 2 ) > 0 , ( d 1 , r 2 ) if h ( r 2 ) < 0 , where M 3 is the uniqu e root(if there exist) of the quadra tic equ ation g ( x ) = ax 2 + bx + c in d 1 < f 1 l 1 < r 1 . Let x 1 = − b + √ D 2 a , x 2 = − b − √ D 2 a are the roots o f the Q uadratic e quation g ( x ) = 0 , where a = (( C 1 − C 2 + r 2 )(1 − α ) − αr 2 ); b = (1 − α )[4 C 1 ( C 2 − r 1 − r 2 ) + 2 r 1 C 1 ] − 2 αr 2 C 1 ); c = (1 − α )[( C 2 − r 1 − r 2 + C 1 ) C 1 ( C 2 − r 2 − r 1 ) − r 1 C 2 1 ] + αr 2 C 2 1 ; D = b 2 − 4 ac. The quad ratic eq uation g ( x ) = 0 will h av e unique solution in th e ran ge 0 < f 1 l 1 < r 1 because J ′ 1 ( f 1 1 , r 2 ) is strict conve x in the r ange 0 < f 1 l 1 < r 1 ( b y definition of M/M/1 cost fun ction). Hen ce there can be atmost one equilibriu m poin t satisfying d 1 < M 3 < r 1 (i.e single interior point). Otherwise when there is no interior equ ilibrium po int, there may exist equ ilibrium at f l 1 1 = 0 or f l 1 1 = r 1 , i.e., at p oint (0 , r 2 ) or a t point ( r 1 , r 2 ). The p oint (0 , r 2 ) can be an equilibriu m point o nly when J ′ 1 (0 , r 2 ) > 0 , i. e., g ( r 2 ) > 0 . Similarly point ( r 1 , r 2 ) c an be equilibrium point only when J ′ 1 (0 , r 2 ) < 0 , i.e., g ( r 2 ) < 0 . Corollary 1 Consider the symme tric parallel link s, i.e., ( C 1 = C 2 = C , r 1 = r 2 = r ) n etwork with M/M/1 delay link cost fu nction. In a mixed user setting the mixed equilibrium strate gy ( ( f 1 ∗ l 1 , f 2 ∗ l 2 ) ) ca n b e g iven by ( r 2 , r 2 ) when r 1 > f 1 l 1 > 0 , r 2 > f 2 l 2 > 0 (0 , 0) when 0 ≤ f 1 l 1 ≤ r 1 , f 2 l 2 = 0 , if α ≥ 0 . 5 ( r , r ) when 0 ≤ f 1 l 1 ≤ r 1 , f 2 l 1 = 0 , if α ≥ 0 . 5 Proof: Consider th e sym metric case when C 1 = C 2 = C , r 1 = r 2 = r . The gener al cond ition thus r educes to r < C fr om prop. 1 . Equilibrium can be attained under the following scenario based on link uses. 1) When both link is used by W ar dr op u sers: W ardro p users u tilizes both the links, i.e., f 2 l 1 > 0 , f 2 l 2 > 0 , implies co st f unction of both the links are same, i.e., T l 1 ( f l 1 ) = T l 2 ( f l 2 ) . From T l 1 ( f l 1 ) = T l 2 ( f l 2 ) ⇒ f 2 l 2 = f 1 l 1 , 0 < f 1 l 1 < r, and 0 < f 2 l 2 < r , implies th at necessary con dition fo r equilibriu m to exist are always satisfied. Furth er the equilibriu m strategy ( f 1 ∗ l 1 , f 2 ∗ l 2 ) is giv en b y ( r 2 , r 2 ) whic h 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Mixed Equilibrium Degree of Cooperation( α ) Flow at Equilibrium Group User(Nash) Individual User(Wardrop) Fig. 7. T opology : Pa ralle l links, Cost functio n : M/M/1 Delay , Paramet ers : C l 1 = 4 , C l 2 = 3 , r 1 = 1 . 2 , r 2 = 1 . can be directly obtained from pr op. (1.1). 2) When only one link (link 1 ) is used by W ardr op user: In this case, W ardrop u sers utilize only lin k 1 , i.e., f 2 l 2 = 0 . This d irectly imp lies T l 1 ( f l 1 ) ≤ T l 2 ( f l 2 ) ⇒ f 1 l 1 ≤ 0 (from wardrop cond ition). Combin ing the above with positive flow condition 0 ≤ f 1 ∗ l 1 ≤ r 1 , we obtain f 1 ∗ l 1 = 0 . This suggests that equilibriu m poin t can be given by ( f 1 ∗ l 1 , f 2 ∗ l 2 ) = (0 , 0) if there exist. Note that (0 , 0) is the boun dary point solu tion. If J ′ 1 (0 , 0) ≥ 0 (Na sh solu tion of u ser 1 ) then the equilibriu m po int is given b y (0 , 0 ) . J 1 ′ ( f 1 l 1 , 0) can b e expressed as P ( x ) Q ( x ) , where P ( x ) = ax 2 + b x + c a = r (2 α − 1); b = 2( C − r )(2( C − r )(1 − α ) + r ); c = (2 α − 1 ) r ( C − r ) 2 ; D = 16( C − r ) 2 (1 − α ) C [( C − r )(1 − α ) + αr ] and Q ( x ) > 0 fo r all x , then ce J ′ 1 (0 , 0) ≥ 0 ⇒ c ≥ 0 ⇔ α ≥ 0 . 5 . 3) When only one link ( 2 ) is used b y W ar dr op user: In th is case, W ard rop users u tilize only link 2 , i.e., f 2 l 2 = r . This d irectly imp lies T l 1 ( f l 1 ) ≥ T l 2 ( f l 2 ) ⇒ f 1 l 1 ≥ r (from W ardr op con dition). Com bining the above with positive flow condition 0 ≤ f 1 ∗ l 1 ≤ r 1 , we obtain f 1 ∗ l 1 = r . T his suggests that equilib rium p oint can be giv en b y ( f 1 ∗ l 1 , f 2 ∗ l 2 ) = ( r, r ) if there exist. Remark that this case is symmetrical to ca se when only link 1 is used. Hen ce we can dire ctly infer the con dition for equilibr ium point to exist. The equilibriu m point point ( r , r ) exist, when α ≥ 0 . 5 . In Fig. (7), we d epict the mixed equilibrium strategy(flow) for the varying degree of c ooperatio n ( α ) . Observe the lo ss of un iqueness o f mixed e quilibrium in pr esence of partial cooper ation. It is kn own to have unique equilib rium in the network setting with fin itely many selfish users [1 5]. Remar k that we ha ve already shown in the pre vious s ection that there exist mu ltiple Nash equilib ria in presen ce o f pa rtial cooper ation. Due to space limitatio n we illustrate th is behavior with o nly parallel links topolog y and M/M/1 cost fun ction. Howe ver we identify a similar remark from other configuration also. V . E X I S T E N C E A N D U N I Q U E N E S S O F E Q U I L I B R I U M Having noted the existence of multiple Na sh eq uilibrium in sec.II I-A using various examples, we here establish the condition s un der which u nique nash eq uilibrium e xist. Unique- ness of Nash e quilibrium is shown in [2] in case o f non- cooper ati ve games for p arallel links to pology . Under som e condition , un iqueness is shown for g eneral topolo gy a lso. In this section we fo llow the similar structur e to establish the uniquen ess for parallel links topology in ca se of o ur setting of user coopera tion. W e follow some assumption s on the cost f unction J i same as in [2]. Assumption V .1 : G1: J i ( f ) = P l ∈L ˆ J i l ( f l )) . Each ˆ J i l satisfies: G2: J i l : [0 , ∞ ) → (0 , ∞ ] is co ntinuous function. G3: J i l : is conve x in f j l for j = 1 , ... |I | . G4: Wher ever finite, J i l is continuo usly differ en tiable in f i l , denote K i l = δ ˆ J i l δf i l . Note the inclusion of + ∞ in the ran ge of ˆ J i l , wh ich is useful to incor porate implicitly and co mpactly and addition al c on- straints suc h as link capacities. Also n ote that the assumption G 3 is stronger than in [2] . Function that co mply with these general assumptions, we call type G func tion. For selfish u ser oper ating on parallel links NEP is shown to exist in [2] with the function wh ich comply with the type G func tion. W e shall mainly con sider cost fu nctions th at c omply with the following assump tions: Assumption V .2 : B1: J i ( f ) = P l ∈L f i l T l ( f l )) B2: T l : [0 , ∞ ) → (0 , ∞ ] . B3: T l ( f l ) is positive, strictly incr ea sing and con vex. B4: T l ( f l ) is continuo usly d iffer entiable. Functions th at comp ly with these assumption s are re ferred to as type - B functio ns. Remark 1 In Assumptio n B1 , T l ( f l ) is the cost per unit of flow (for example mean dela y) o n the link l , for the total utilization, f l = P i ∈I f i l , of th at lin k. Note th at if T l ( f l ) is the average delay on link l , it depend s on ly o n the total flow on that link. The average delay should be interpr eted as a general congestion cost per un it o f flo w , which en capsulates the de pendenc e of the q uality of service p r ovided by a fi nite capacity r esou r ce on the total load f l offer ed to it. A special kind o f type-B cost f unction is that wh ich corre- sponds to an M/M /1 link model. In other words, suppose that C1: ˆ J i ( f i l , f l ) = f i l ˙ T l ( f l ) is a type -B cost function. C2: T l = 1 C l − f l f l < C l ∞ f l > C l . Where C l is the capacity of the lin k l . Function th at com ply with th ese requ irements are referred to as type- C fu nctions. Such delay fu nctions are bro adly used in modeling the beha vior of the link s in computer communication networks [11], [12]. A. P arallel links network top ology In this section we study the special case w here the u sers from set I sh ares a set of parallel commun ication links L = { 1 , 2 ....L } interconnectin g a comm on sour ce node to a com- mon destinatio n nod e. In [2 ], uniqu eness of Nash equilibrium is shown fo r the selfish users (when user do not coo perate in managing the communicatio n link) in parallel link s, where the cost functio ns ( J i ( f ) ) of users ar e assumed to ho ld assumption V .2. Howe ver this is not tru e wh en the users hav e coo peration in d egree as d efined in sec.(2). W e observe that a ssumption V .2 is not sufficient to guaran tee u nique Nash equilibriu m in our setting. It is a ha rder pro blem to ch aracterize system behavior for general degree of cooper ation. Hen ce we consid er a special case of cooperation where a user coop erative with similar coop eration with all o ther users i.e. ˆ J i ( f ) = (1 − α i ) J i ( f ) + α i X k J k ( f ) Consider the cost functio n of ty pe V .2. Th e cost fun ction of each user on link l is given by ˆ J i l ( f ) = ((1 − α i ) f i l + α i f − i l ) T l ( f l ) = ((1 − α i ) f l + (1 − 2 α i ) f − i l ) T l ( f l ) Existence pr oblem in the case o f Nash equilib rium for the cost functio n ˆ J i l ( f ) can be directly stud ied as in [2]. Note that in c ase of α i < 0 . 5 for all i ∈ I , the u niquene ss of Nash equilibriu m is gua ranteed fro m E. Or da et al. [2]. Note that when α i < 0 . 5 , the function K i l ( f − i l , f l ) is strictly increasing function in f − i l and f l . Uniquene ss o f N ash equilib rium can b e also observed in case o f All-po siti ve flow in each link. By All-positiv e flow we mean that e ach user hav e strictly positive flow o n each lin k of the network. The following result establishes the uniquen ess of Nash Equilibriu m in case o f positiv e flo w . Theorem V .1 Con sider the cost function of type V .2. Let ˆ f and f be two Nash eq uilibria such tha t th er e exists a set of links L 1 such th at { f i l > 0 an d ˆ f i l > 0 , i ∈ I } for l ∈ L 1 , and { f i l = ˆ f i l = 0 , i ∈ I } for l 6∈ L 1 . Then ˆ f = f . Proof: Let f ∈ F and ˆ f ∈ F be two NEP’ s. As observed f and ˆ f satisfy th e Kuhn-T ucker c ondition. W e rewrite the Kuhn - T ucker con dition in terms of f − i l , f l as below , K i l ( f − i l , f l ) ≥ λ i ; K i l ( f − i l , f l ) = λ i if f i l > 0 ∀ i, l K i l ( ˆ f − i l , ˆ f l ) ≥ λ i ; K i l ( ˆ f − i l , ˆ f l ) = λ i if ˆ f i l > 0 ∀ i, l The ab ove relatio n and the fact th at K i l ( . ; . ) is increasing in both of is argumen t will be u sed b elow to establish tha t f = ˆ f i.e. f i l = ˆ f i l for every l , i . The first step is to estab lish that f l = ˆ f l for each link l . T o this end, we prove that for each l and i , the following re lation holds: { ˆ λ i ≤ λ i , ˆ f l ≥ f l } implies that ˆ f − i ≤ f − i , (4) { ˆ λ i ≥ λ i , ˆ f l ≤ f l } implies that ˆ f − i ≥ f − i . (5) W e sh all prove (4), since (5) is symmetr ic. Assum e tha t ˆ λ i ≤ λ and ˆ f l ≥ f l for som e l and i . For f i l > 0 together with our assumptions imply that: K i l ( ˆ f − i l , f l ) = ˆ λ i ≤ λ i ≤ K i l ( f − i l , f l ) ≤ K i l ( ˆ f − i l , ˆ f l ) , (6) where the last ineq uality follows f rom the mo notonic ity of K i l in its second argumen t. Now , since K i l is nondecr easing in its first argument, this implies that f − i l ≤ f i l , an d (4) is established. Let L 1 = { l : ˆ f l > f l } . Also de note I a = { i : ˆ λ i > λ i } , L 2 = L − L 1 = { l : ˆ f l ≤ f l } . Assume that L 1 is non emp ty . Recalling th at P l ˆ f − i l = P l f − i l = r − i , it follows from (5) that for ev ery i in I a , X l ∈L 1 ˆ f − i = r − i − X l ∈L 2 ˆ f − i ≤ r − i − X l ∈L 2 f − i = X l ∈L 1 f − i , i ∈ I a . From ( 4), we know that , ˆ f − i l ≤ f − i l for l ∈ L 1 and i / ∈ I a , it follows tha t : X l ∈L 1 ˆ f l = X l ∈L 1 P i ∈I ˆ f − i l I − 1 ≤ X l ∈L 1 P i ∈I f − i l I − 1 = X l ∈L 1 f l This ineq uality obviously co ntradicts our definition of L 1 . Which implies that L 1 is an empty set. By symmetr y , it may also be conclud ed that the set { l : ˆ f l < f l } is also emp ty . Thus, it has been established that: ˆ f l = f l for every l ∈ L . (7) W e n ow show that ˆ λ i = λ i for each user i . T o this en d, note that (4) may be streng then as follows: { ˆ λ i < λ i , λf l = f l } implies that either ˆ f − i l < f − i l or ˆ f − i l = f − i l = 0 . (8) Indeed if f − i l = 0 , then the imp lication is trivial. Othe rwise, if f − i l > 0 , it follows similar to (6 ) that K i l ( ˆ f − i l , ˆ f l ) that ˆ f − i l < f − i l as r equired. Assume now that ˆ λ i < λ i for some i ∈ I . Since P l ∈L ˆ f − i l = r − i > 0 , then f − i l > 0 for at least one link l a nd f rom (8) imp lies th at, P l ∈L f i l > P l ∈L ˆ f i l = r i , which contrad icts the de mand c onstraint for user i . W e, therefor e, conclude th at ˆ λ i < λ i does no t h old fo r any user i . A sym metric argum ent may b e u sed to show that ˆ λ i = λ i for ev ery user i ∈ I . Comb ined with (7), this imp lies by (4) and (5) that ˆ f − i l = f − i l for every l , i . Aga in since f i l = f l − f − i l , uniquen ess of f i l is proved. B. Uniquen ess of NEP in general to pology It is a hard to characterize system behavior for gener al network with u ser’ s partial cooper ation. For selfish users, it is shown that there exist uniq ueness fo r Nash e quilibrium point(NEP) under Diagon al Strict Convexity in [2]. W e con sider a special case o f co operation wh ere a user cooper ates equ ally with all other users i.e. ˆ J i ( f ) = (1 − α i ) J i ( f ) + α i X k J k ( f ) Consider the cost functio n of ty pe V .2. Th e cost fun ction of each user on link l can be thus given by ˆ J i l ( f ) = ((1 − α i ) f l + (1 − 2 α i ) f − i l ) T l ( f l ) (9) Theorem V .2 Con sider the cost function of type V .2. Let ˆ f and f be two Nash eq uilibria such tha t th er e exists a set of links L 1 such th at { f i l > 0 and ˆ f i l , i ∈ I } for l ∈ L 1 , a nd { f i l = ˆ f i l = 0 , i ∈ I } for l 6∈ L 1 . Then ˆ f = f . Under all positive flows assump tion, the Kuhn-T uker cond i- tions for all l = ( u, v ) ∈ L ∞ becomes ((1 − α i ) f i l + α i f − i l ) T ′ l ( f l )+(1 − α i ) T l ( f l )= λ i u − λ i v ((1 − α i ) ˆ f i l + α i ˆ f − i l ) T ′ l ( ˆ f l )+(1 − α i ) T l ( ˆ f l )= ˆ λ i u − λ i v Summing each of these equ ations over i , we obtain H uv ( f l ):=( αI +1 − 2 α ) T ′ l ( f l )+ I (1 − α ) T l ( f l )= λ u − λ v H uv ( ˆ f l ):=( αI +1 − 2 α ) ˆ f l T ′ l ( ˆ f l )+(1 − α ) I T l ( ˆ f l )= ˆ λ u − λ v Since the functio n H is strictly in creasing, we follow the same proof of Theor em 3 .3 in [2] to conclu de that ˆ f = f . V I . C O N C L U D I N G R E M A R K S This paper is aime d at exploring user perfo rmance in routin g games where a finite nu mber of users take into acco unt not only their per formanc e but also o ther’ s user’ s p erforman ce. W e have parameterize d the degr ee of Coo peration to capture the user behavior from altr uistic to ego-cen tric regime. W e notice some strang e behaviors. Firstly we show the existence of mu ltiple N ash eq uilibria by a simple example o f para llel links and lo ad balancing networks in contrast to the uniqu e Nash eq uilibrium in case of selfish user s. More over , we then explored the mixed u ser scenario , wh ich is c omposed of a finite number of Gro up typ e user seeking Nash equ ilibrium and infinitely many In dividual type users satisfying W ardro p condition . W e illustrate lo ss of un iqueness of eq uilibrium even in mixed users scenario in presen ce o f partial coop eration b y an example for parallel links network . Howe ver it is known to h a ve unique equilibriu m in presence o f only finitely many selfish users in similar settings. Secondly we id entify two kinds of parado xical behavior . W e identify situation where well k nown Braess parado x occurs in ou r setting o f coo peration. W e show using an example of parallel lin ks network with M/M/1 link cost that addition of system resou rces ind eed d egrades th e perf ormance of all user s in p resence of some coop eration, while it is well kn own that this is not true fo r this setting with only selfish users. W e also identify ano ther type of paradox , paradox in co oper- ation: i.e. when a g iv en u ser increases its de gree of co operation while other users keep unchanged their degree of coop eration, this may lead to an impr ovement in performan ce o f th at g i ven user . In extreme sense a user can ben efit itself by adop ting altruistic nature instead of selfishness. R E F E R E N C E S [1] Amar Prakash Azad, E itan Altamn, and Rachid Elazouz i, “From Altruism to Non-Coo perati on in Routing Games”, av ailable on Arxi v(arXi v:0808.4079 ). [2] Ariel Orda, Raphael Rom, and Nahum Shimkin, “ Competiti ve Routing in Multiuser Communication Networks”, IEEE/ ACM T ransaction s on Network ing , V ol.1 No. 5, October 1993 [3] J.B.Rosen, “ Existe nce and unique ness of Equilibrium points for conca ve N-Person Games”. Economet rica , V ol. 33 , No. 3, Pp. 153-16 3, July 1965. [4] N. G. Bean , F . P . Kelly and P . G.T aylor , “Braess’ paradox in a loss netw ork”. J . Appl. Prob . 34, pp. 155–159, 1997. [5] H. Kameda, “Ho w harmful the parad ox can be in Braess/C ohen-K elly- Jef fries netw orks”, Pr oc. IEEE Infoco m 2002 , Ne w Y ork , pp. 437-445, June 2002. [6] H. Kameda , E . Altman and T . Koza wa,“ A case where a paradox lik e Brae ss’ s occurs in the Nash equilibrium but does not occur in the W ardrop equili brium - a situation of loa d balanc ing in distrib uted computer systems” , Pr ocee dings of IE EE CDC’99 , Phoenix, Arizona , USA, Dec. 1999 [7] H. Kameda , E. Altman, T . Koza wa, Y . Hosokawa , “Braess-lik e Parad oxes in Distribute d Computer Systems” , IEEE T ransaction on Automat ic contr ol , V ol 45, N o 9, pp. 1687-1691, 2000. [8] K. Park, M. Sitharam, and S. Chen. “Quality of service provisi on in noncooperat i ve networks with dive rse user requirement s”, Decis. Support Syst. , vol. 28, no.1-2, pp. 101-122, 2000. [9] E. Altman and H. Kameda. “Equilibria for multicl ass routi ng probl ems in m ulti-a gent networks”, 40th IEEE Conferen ce on Decision and Contr ol , Orland o, Dec. 2000. [10] R. W . Rosenthal . A class of games possessing pure strategy nash equili bria. Int. J . Game Theory , 2:65–67, 1973. [11] D. Bertsekas and R. Gallager , “ Data Networks”. Eagle wood Clif fs. NJ:Prentic e Hall, 1987 [12] L. Kleinrock,“ Queueing Systems”, New Y ork: Wil ey , 1975. [13] T . Jimenez, E. Altman, T . Basar and N. Shimkin, “Competiti ve routing in networks with polynomial [14] P . Harker , “Mult iple equili brium behaviors on networks”, T ransportation Resear ch B , 22, pp. 39-46, 1988. [15] T . Boulogn e , E. Altman, O. Pourtal lier and H. Kameda , “Mixed Equilibri um for Multicl ass Routing Games”, IEEE T rans. on Automati c Contr ol, special issue on contr ol issues in telecommun icati on networks , V ol 47 Number 6, pp. 903-916, June 2002. [16] B. W . W ie, “ A dif ferential game approach to t he dynamic mix ed behavior traf fic net work equilib rium problem”, Eur opean Journal of Operati onal Resear ch , 83:117136, 1995. [17] T . Basar and G. Olsder , Dynamic Noncooper ativ e Game Theory , Aca- demic Press, London, 1982.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment