Authors: ** - Ashish Vashist* – Department of Aerospace Engineering, Indian Institute of Science (IISc), Bangalore, India - Qiranul Saadiyean* – Department of Aerospace Engineering, Indian Institute of Science (IISc), Bangalore, India - Suresh Sundaram* – Department of Aerospace Engineering, Indian Institute of Science (IISc), Bangalore, India - Chandra Sekhar Seelamantula† – Department of Electrical Engineering, Indian Institute of Science (IISc), Bangalore, India * 공동 1저자 † 교신 저자 **
📝 Abstract
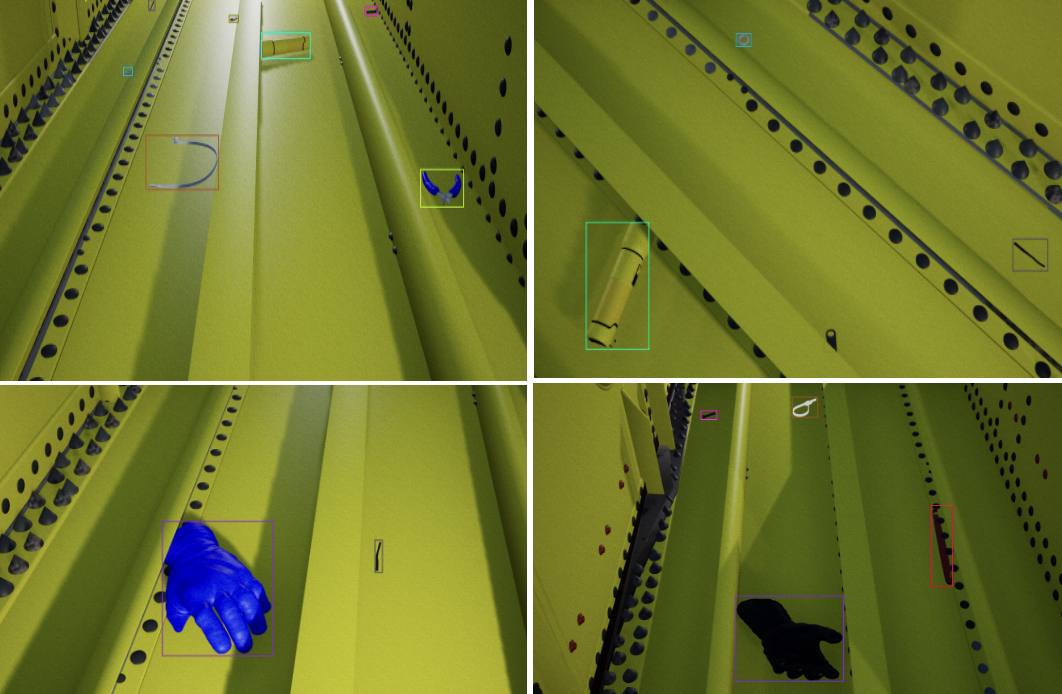
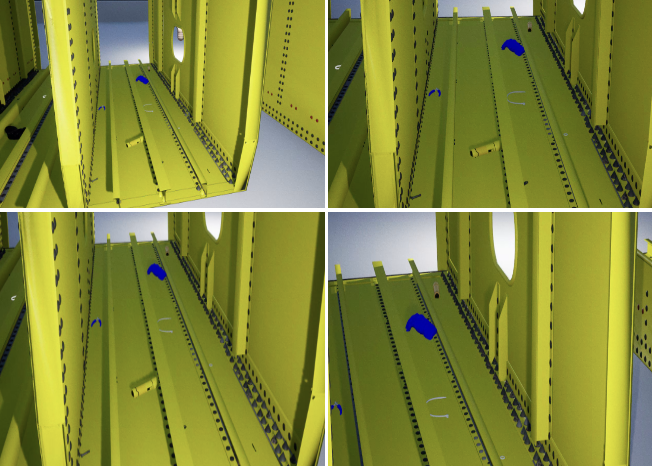
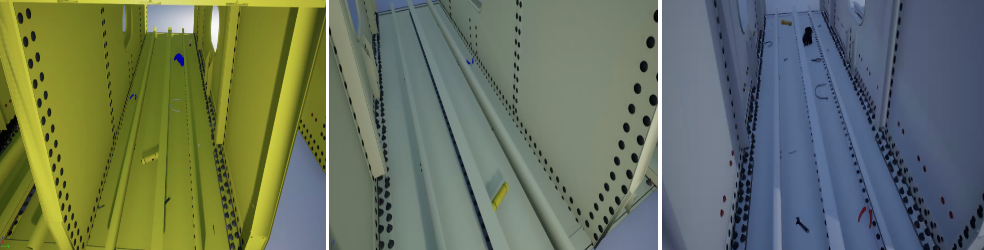
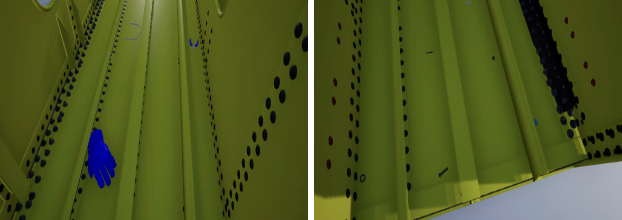
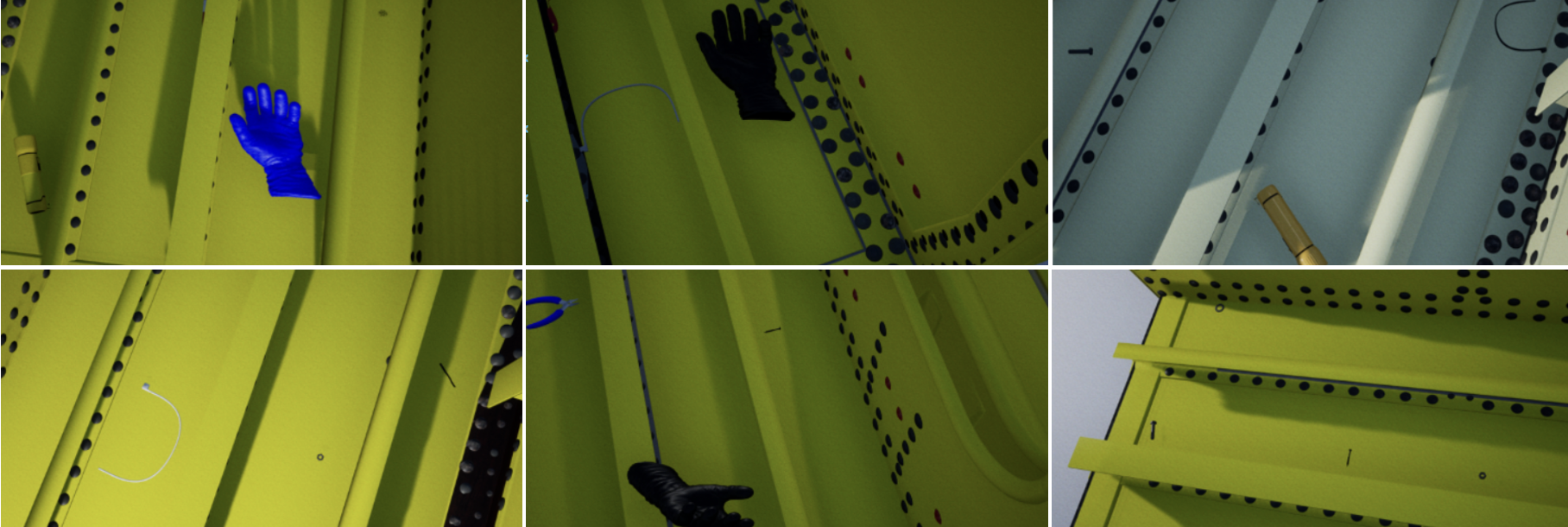
Foreign Object Debris (FOD) within aircraft fuel tanks presents critical safety hazards including fuel contamination, system malfunctions, and increased maintenance costs. Despite the severity of these risks, there is a notable lack of dedicated datasets for the complex, enclosed environments found inside fuel tanks. To bridge this gap, we present a novel dataset, FOD-S2R, composed of real and synthetic images of the FOD within a simulated aircraft fuel tank. Unlike existing datasets that focus on external or open-air environments, our dataset is the first to systematically evaluate the effectiveness of synthetic data in enhancing the real-world FOD detection performance in confined, closed structures. The real-world subset consists of 3,114 highresolution HD images captured in a controlled fuel tank replica, while the synthetic subset includes 3,137 images generated using Unreal Engine. The dataset is composed of various Field of views (FOV), object distances, lighting conditions, color, and object size. Prior research has demonstrated that synthetic data can reduce reliance on extensive real-world annotations and improve the generalizability of vision models. Thus, we benchmark several state-of-the-art object detection models and demonstrate that introducing synthetic data improves the detection accuracy and generalization to real-world conditions. These experiments demonstrate the effectiveness of synthetic data in enhancing the model performance and narrowing the Sim2Real gap, providing a valuable foundation for developing automated FOD detection systems for aviation maintenance.
💡 Deep Analysis
📄 Full Content
FOD-S2R: A FOD Dataset for Sim2Real Transfer
Learning based Object Detection
Ashish Vashist∗
Qiranul Saadiyean∗
Suresh Sundaram∗
Chandra Sekhar Seelamantula†
∗Department of Aerospace Engineering, Indian Institute of Science (IISc), Bangalore, India
†Department of Electrical Engineering, Indian Institute of Science (IISc), Bangalore, India
Abstract—Foreign Object Debris (FOD) within aircraft fuel
tanks presents critical safety hazards including fuel contami-
nation, system malfunctions, and increased maintenance costs.
Despite the severity of these risks, there is a notable lack of
dedicated datasets for the complex, enclosed environments found
inside fuel tanks. To bridge this gap, we present a novel dataset,
FOD-S2R, composed of real and synthetic images of the FOD
within a simulated aircraft fuel tank. Unlike existing datasets that
focus on external or open-air environments, our dataset is the first
to systematically evaluate the effectiveness of synthetic data in
enhancing the real-world FOD detection performance in confined,
closed structures. The real-world subset consists of 3,114 high-
resolution HD images captured in a controlled fuel tank replica,
while the synthetic subset includes 3,137 images generated using
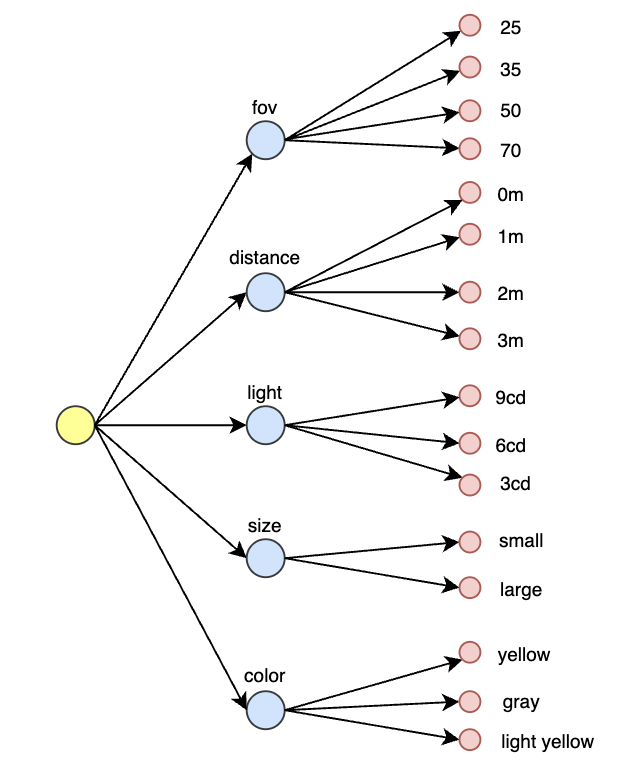
Unreal Engine. The dataset is composed of various Field of views
(FOV), object distances, lighting conditions, color, and object
size. Prior research has demonstrated that synthetic data can
reduce reliance on extensive real-world annotations and improve
the generalizability of vision models. Thus, we benchmark
several state-of-the-art object detection models and demonstrate
that introducing synthetic data improves the detection accuracy
and generalization to real-world conditions. These experiments
demonstrate the effectiveness of synthetic data in enhancing the
model performance and narrowing the Sim2Real gap, providing
a valuable foundation for developing automated FOD detection
systems for aviation maintenance.
I. INTRODUCTION
Recent advances in aviation have significantly improved
flight safety, operational efficiency, and airport infrastructure.
However, as air traffic has increased, safety concerns related
to airport environments have become increasingly critical. One
of the persistent threats to aviation safety is Foreign Object
Debris (FOD), which includes any loose object such as nuts,
bolts, tools, or metal fragments that can damage aircraft during
takeoff, landing, or ground operations. Small debris such
as metal shavings can have severe consequences, including
engine failure, fuel leaks, and system malfunctions, ultimately
compromising passenger safety and flight integrity.
While modern computer vision and AI-based object de-
tection techniques have significantly advanced the ability to
identify foreign objects in open environments, such as runways
and airport aprons, a major challenge remains in detecting
FOD in constrained and enclosed areas, such as inside fuel
tanks or maintenance bays [11] [29] [62]. These spaces often
have poor lighting, complex surfaces, irregular geometries, and
limited accessibility, making conventional detection methods
less effective.
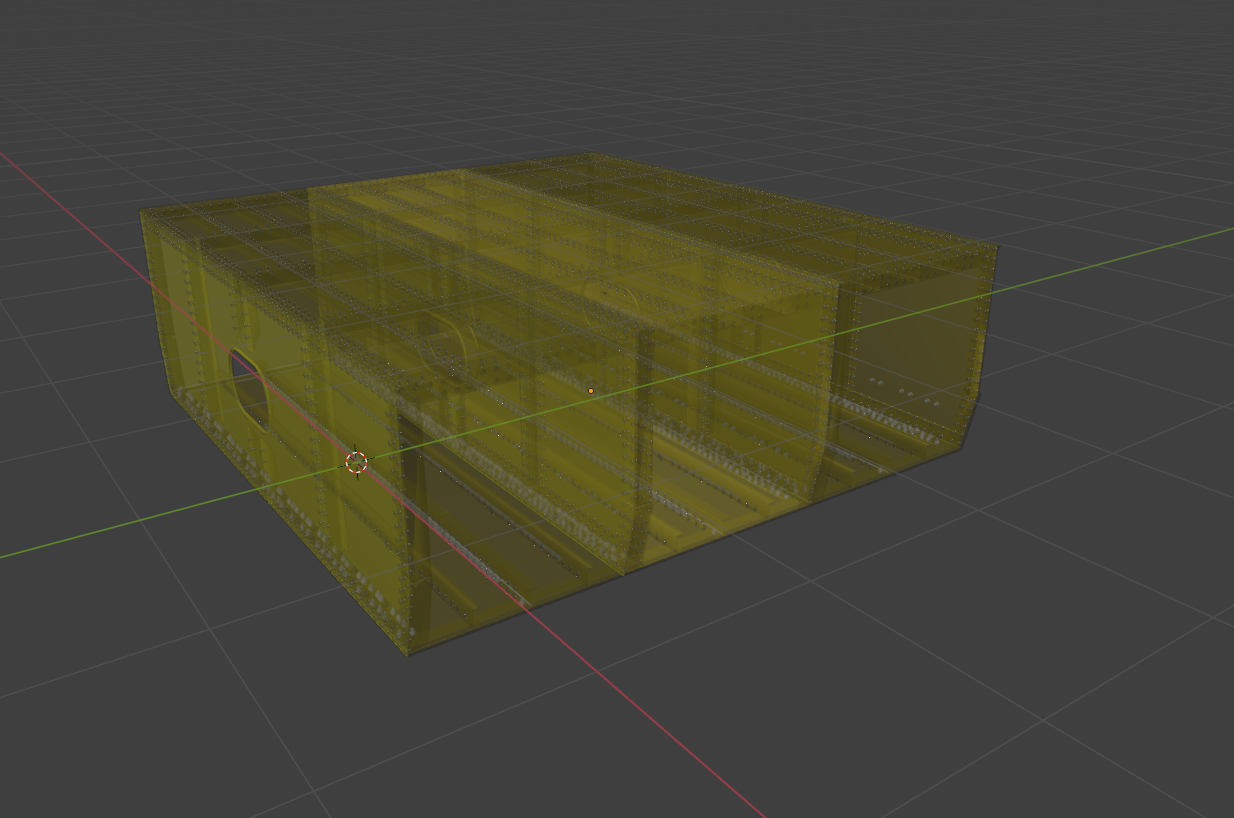
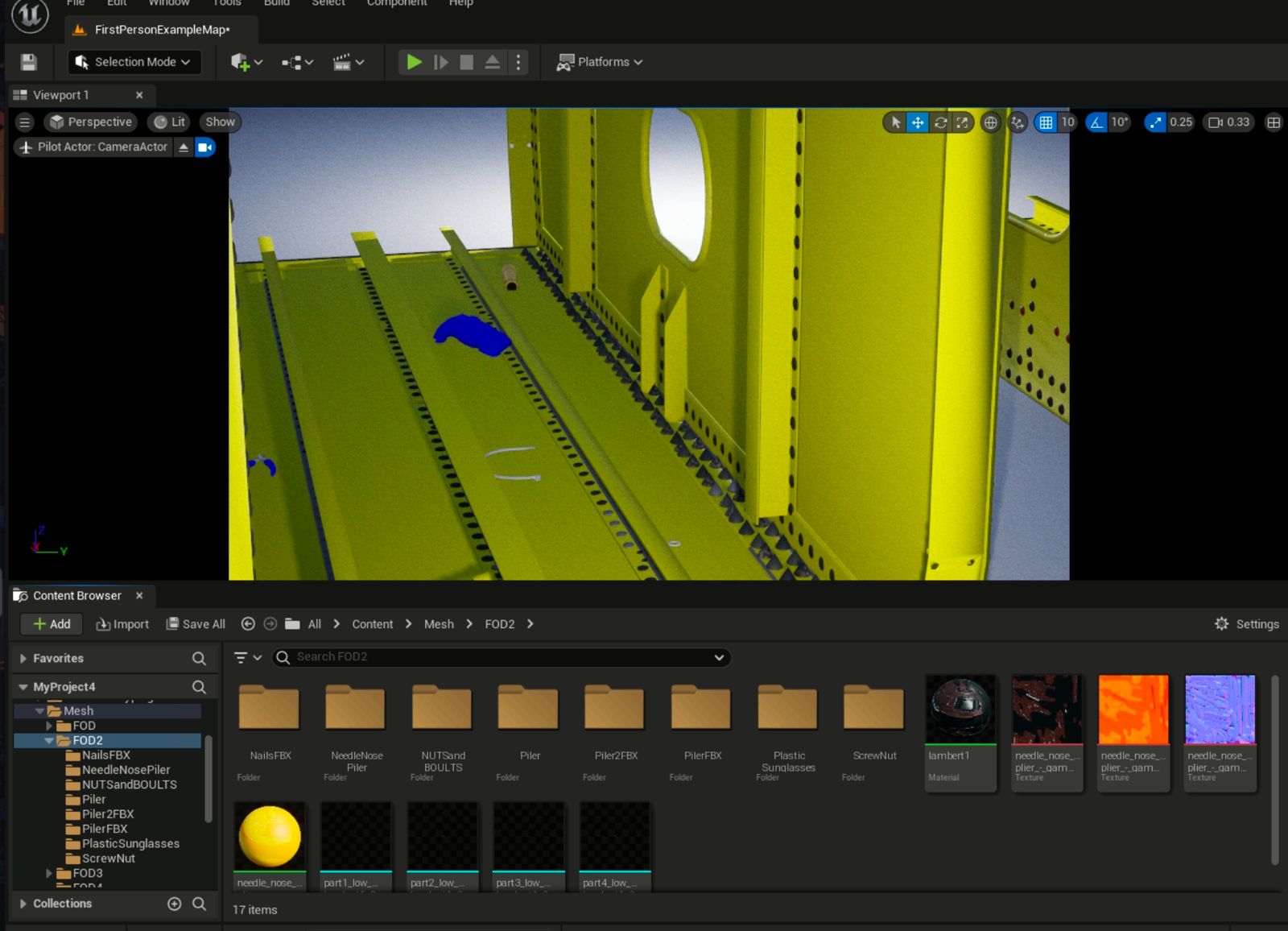
Fig. 1: Unreal Engine editor used to assemble fuel-tank scenes
for synthetic FOD data generation, allowing precise control
over camera pose, lighting, and object layout.
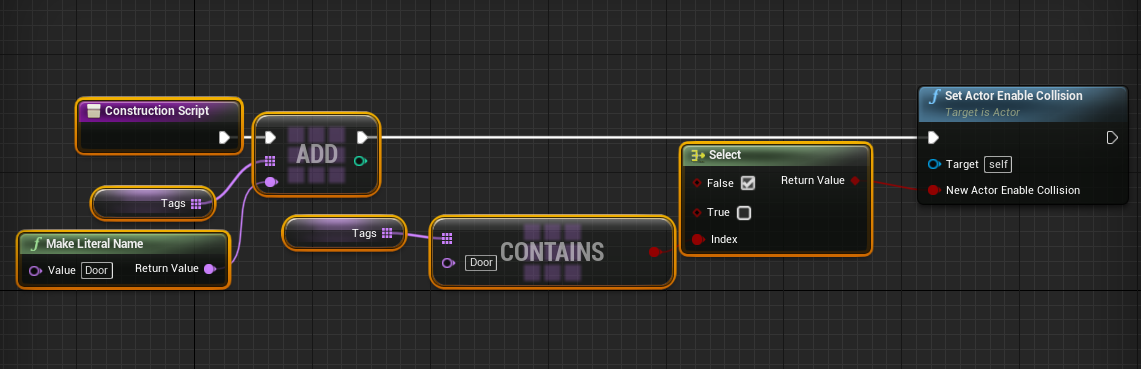
Fig. 2: Blueprint scripting for Dataset generation using Unreal
Engine.
Furthermore, the development of robust AI models has been
hindered by the lack of comprehensive datasets specifically
designed for such complex environments. Most existing FOD
datasets focus on outdoor conditions and do not capture the
visual and spatial constraints unique to internal aircraft com-
partments, such as fuel tanks. Collecting and annotating these
datasets in aviation settings is labor intensive, expensive, and
often restricted by safety regulations. Furthermore, real-world
datasets tend to be limited in size and diversity, often under-
representing critical FOD classes, which can introduce bias
and degrade model performance. To address these limitations,
synthetic data generation through high-fidelity simulations has
gained traction as a viable alternative. Using platforms such
as Unreal Engine, CARLA, and NVIDIA Isaac Sim [12] [10]
arXiv:2512.01315v1 [cs.CV] 1 Dec 2025
[31], researchers can create photorealistic environments [28]
and automatically generate richly annotated data, including
bounding boxes, semantic masks, and depth information.
These simulators provide fine-grained control over variables
such as lighting, object placement, and camera perspectives,
allowing for the simulation of diverse and rare scenarios.
However, models trained solely on synthetic data often
suffer from a domain gap, in which their performance on
real-world data is significantly compromised. To bridge this
gap, the Sim2Real transfer-learning approach was adopted by
researchers [48]. In this method, the model is first trained on a
synthetic dataset, and then fine-tuned on a limited rea