Bilateral Spatial Reasoning about Street Networks: Graph-based RAG with Qualitative Spatial Representations
📝 Original Info
- Title: Bilateral Spatial Reasoning about Street Networks: Graph-based RAG with Qualitative Spatial Representations
- ArXiv ID: 2512.15388
- Date: 2025-12-17
- Authors: Reinhard Moratz, Niklas Daute, James Ondieki, Markus Kattenbeck, Mario Krajina, Ioannis Giannopoulos
📝 Abstract
This paper deals with improving the capabilities of Large Language Models (LLM) to provide route instructions for pedestrian wayfinders by means of qualitative spatial relations.💡 Deep Analysis
📄 Full Content
Bilateral Spatial Reasoning about Street
Networks: Graph-based RAG with Qualitative
Spatial Representations
R. Moratz, N. Daute, J. Ondieki, M. Kattenbeck, M. Krajina, I. Giannopoulos
December 18, 2025
Abstract
This paper deals with improving the capabilities of Large Language
Models (LLM) to provide route instructions for pedestrian wayfinders by
means of qualitative spatial relations. We use a method called Retrieval-
Augmented Generation (RAG). RAG supports the LLM with context in-
formation based on the specific query. We assess the impact the added
information has on model performance for generating pedestrian route
instructions.
Our findings encourage further integration of qualitative
spatial data into LLM applications—potentially benefiting areas such as
digital navigation aids, smart city tools, and accessibility technologies.
1
Introduction
Up until now, Large Language Models show rather weak performance in pro-
viding route instructions to pedestrian wayfinders. For example we can ask an
LLM (ChatGPT-4o by OpenAI) for the direction from M¨unster central station
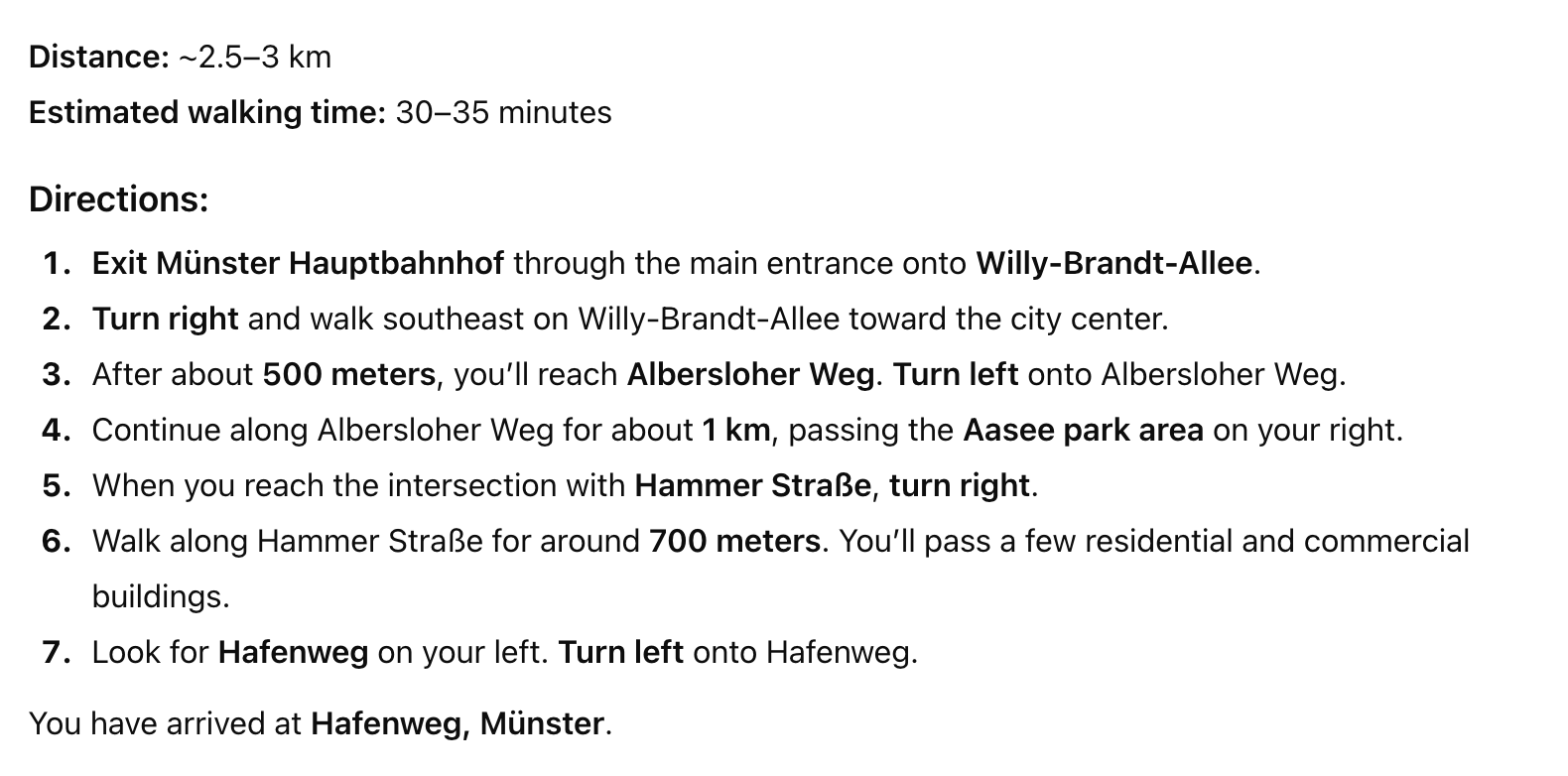
to nearby street Hafenweg (see figure1).
The model responded quickly with a seemingly convincing set of directions
for the given problem. However, upon closer inspection, it becomes evident that
LLM navigation is heavily prone to hallucinations and other errors. In the first
step, the model suggests leaving the central station onto ”Willy-Brandt-Allee”,
which is a street that does not exist in M¨unster. Subsequently, the model sug-
gests walking toward the city center, while the Hafenweg is actually located
away from the city center. Next, turning onto the ”Albersloher Weg” is sug-
gested. While this road exists in M¨unster and is close to the actual destination,
it does not make sense to take the road for the given navigation task. The
same can be said for the following two steps, where turning onto ”Aaseepark”
and ”Hammer Straße” is suggested, with neither of them being sensible choices
for the problem, while also being completely disconnected, making navigation
along the suggested route impossible. Finally, the model suggests turning onto
1
arXiv:2512.15388v1 [cs.AI] 17 Dec 2025
Figure 1: Route instruction generated by LLM
the destination street ”Hafenweg”, which is the correct destination, but impos-
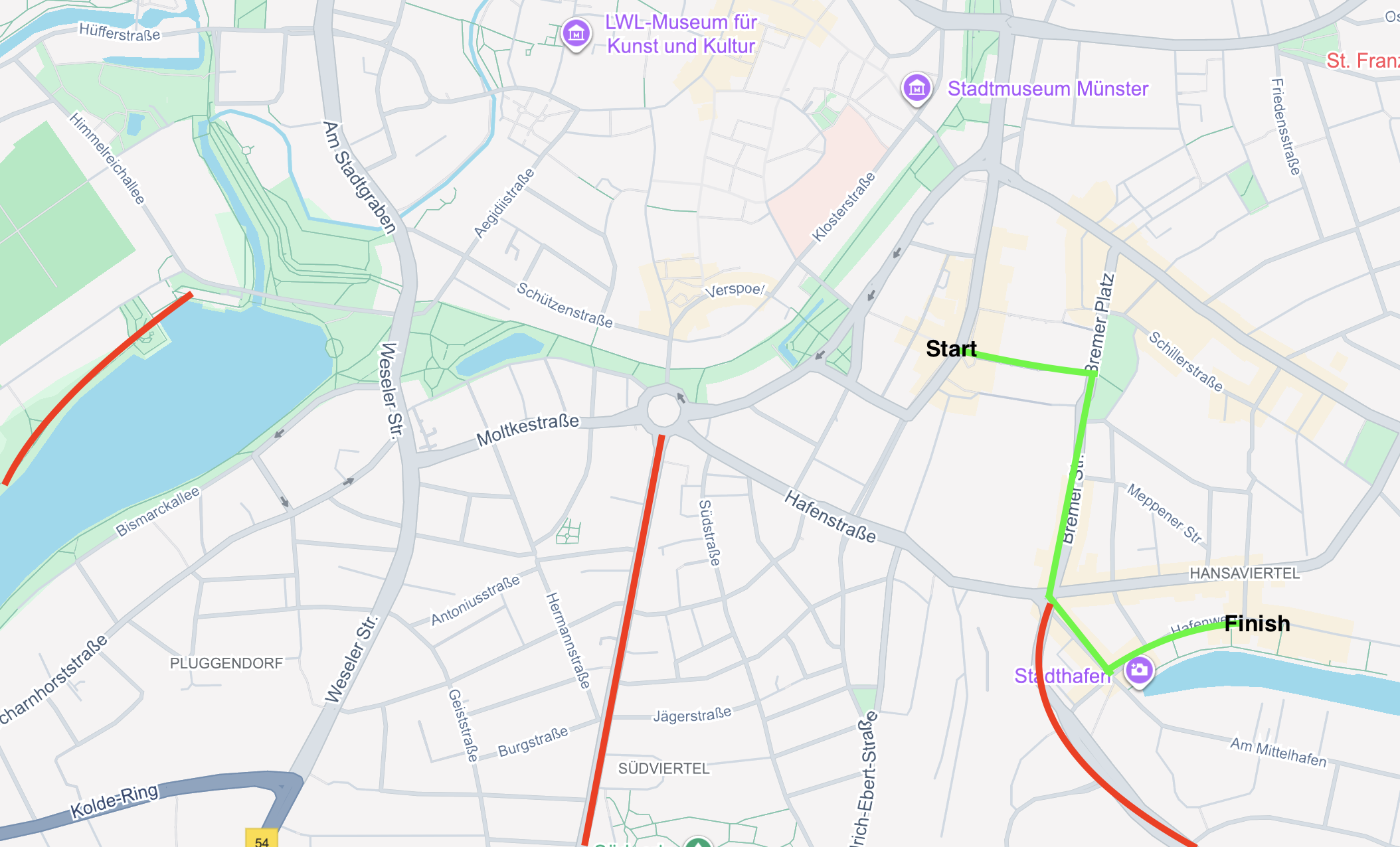
sible given the previous incorrect steps. When comparing this route proposed
by ChatGPT to a route provided by Google Maps, the problem becomes even
more evident. In the figure, the correct route from ”Start” to ”Finish” is shown
in green: A few simple turns from the Central Stations is all it takes to reach
the destination. The generated LLM route displayed in red on the map is how-
ever far from correct: Mutltiple disconnected segments show a complete lack
of understanding the actual navigation task, with only one of them being close
to the actual route. Observations like these highlight the current limitations of
LLMs in navigation performance, and motivated us to find approaches to boost
their capabilities in this domain.
2
Figure 2: Map detail showing erroneous route instruction
3
This paper deals with improving the capabilities of Large Language Models
to provide route instructions for pedestrian wayfinders by means of qualita-
tive spatial relations. We use a method called Retrieval-Augmented Generation
(RAG). RAG supports the LLM with context information based on the spe-
cific query. For this purpose we use a qualitative spatial representation frame-
work which is based on oriented line segments (dipoles) as basic entities [4]. In
our context a qualitative representation provides mechanisms which characterize
central essential properties of objects or configurations. A quantitative repre-
sentation in contrast establishes a measure in relation to a unit of measurement
which has to be generally available. Qualitative spatial spatial representations
usually deal with elementary objects (e.g., positions, directions, regions) and
qualitative relations between them (e.g., ”adjacent”, ”on the left of”, ”included
in”).
2
Graph-Based Retrieval Augmented Genera-
tion (Graph-RAG)
Graph-based Retrieval Augmented Generation represents an advanced evolu-
tion of traditional RAG systems that leverages knowledge graphs to enhance
information retrieval and generation quality [1]. With Graph-RAG language
model receives not just text chunks, but structured information including en-
tity mentions and their properties, explicit relationships between entities, graph
paths showing logical connections, and multi-level abstractions (detailed facts
and high-level summaries).
Traditional RAG retrieves relevant text chunks from a vector database us-
ing semantic similarity, then feeds these chunks to a language model for gen-
eration. Graph-RAG enhances this by organizing information in a knowledge
graph structure, where entities are nodes and relationships are edges, enabling
more sophisticated retrieval strategies.
The system first constructs a knowledg
📸 Image Gallery
Reference
This content is AI-processed based on open access ArXiv data.