OPAL: Operator-Programmed Algorithms for Landscape-Aware Black-Box Optimization
Reading time: 5 minute
...
📝 Original Info
Title: OPAL: Operator-Programmed Algorithms for Landscape-Aware Black-Box Optimization
ArXiv ID: 2512.12809
Date: 2025-12-14
Authors: Junbo Jacob Lian, Mingyang Yu, Kaichen Ouyang, Shengwei Fu, Rui Zhong, Yujun Zhang, Jun Zhang, Huiling Chen
📝 Abstract
Black-box optimization often relies on evolutionary and swarm algorithms whose performance is highly problem dependent. We view an optimizer as a short program over a small vocabulary of search operators and learn this operator program separately for each problem instance. We instantiate this idea in Operator-Programmed Algorithms (OPAL), a landscape-aware framework for continuous black-box optimization that uses a small design budget with a standard differential evolution baseline to probe the landscape, builds a $k$-nearest neighbor graph over sampled points, and encodes this trajectory with a graph neural network. A meta-learner then maps the resulting representation to a phase-wise schedule of exploration, restart, and local search operators. On the CEC~2017 test suite, a single meta-trained OPAL policy is statistically competitive with state-of-the-art adaptive differential evolution variants and achieves significant improvements over simpler baselines under nonparametric tests. Ablation studies on CEC~2017 justify the choices for the design phase, the trajectory graph, and the operator-program representation, while the meta-components add only modest wall-clock overhead. Overall, the results indicate that operator-programmed, landscape-aware per-instance design is a practical way forward beyond ad hoc metaphor-based algorithms in black-box optimization.
💡 Deep Analysis
📄 Full Content
1
OPAL: Operator-Programmed Algorithms for Landscape-Aware
Black-Box Optimization
Junbo Jacob Lian, Mingyang Yu, Kaichen Ouyang, Shengwei Fu, Rui Zhong, Yujun Zhang,
Jun Zhang, Fellow, IEEE, and Huiling Chen, Member, IEEE
Abstract—Black-box optimization often relies on evolutionary
and swarm algorithms whose performance is highly problem
dependent. We view an optimizer as a short program over a
small vocabulary of search operators and learn this operator
program separately for each problem instance. We instantiate this
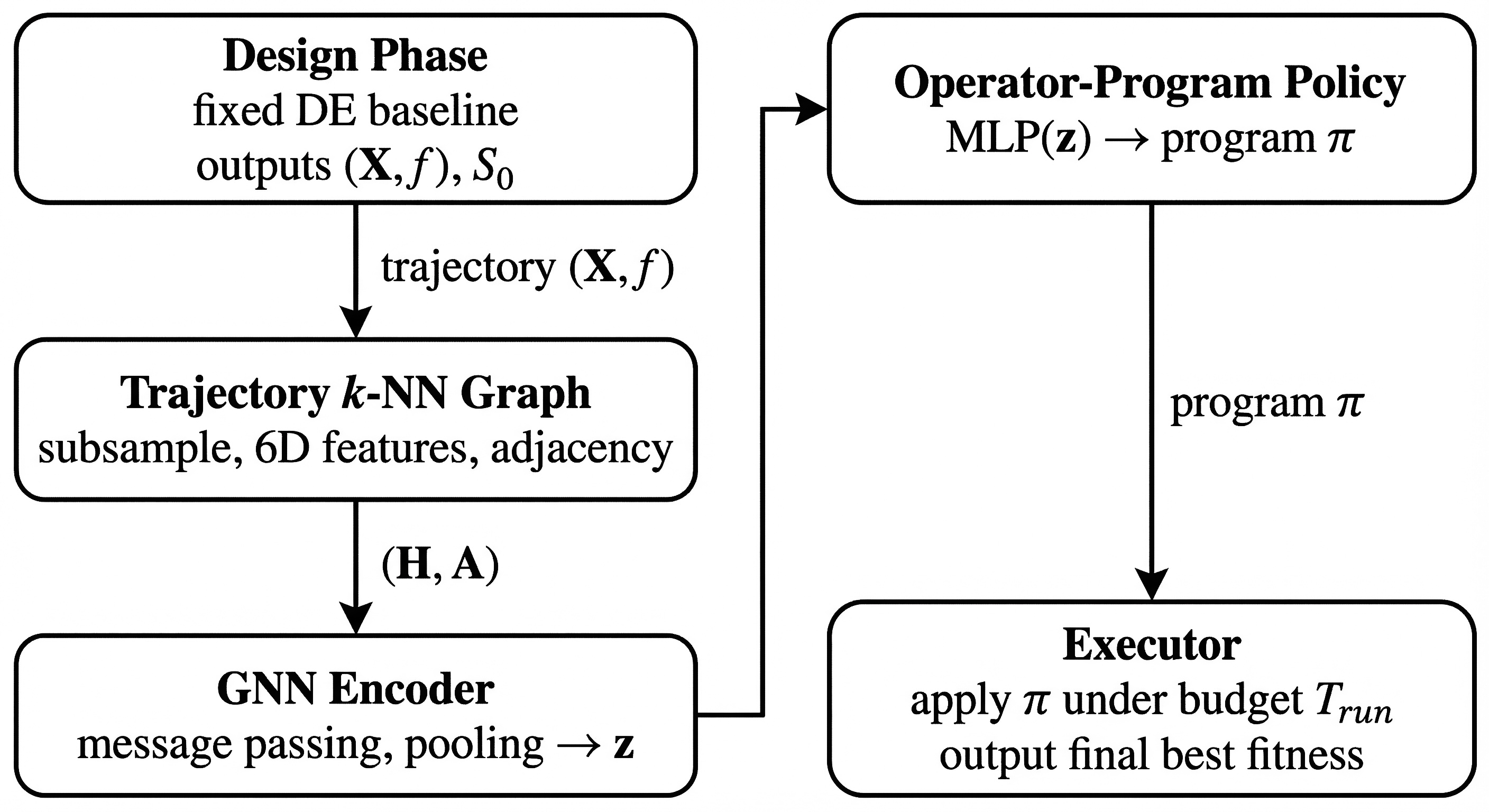
idea in Operator-Programmed Algorithms (OPAL), a landscape-
aware framework for continuous black-box optimization that
uses a small design budget with a standard differential evolution
baseline to probe the landscape, builds a k-nearest neighbor
graph over sampled points, and encodes this trajectory with a
graph neural network. A meta-learner then maps the resulting
representation to a phase-wise schedule of exploration, restart,
and local search operators. On the CEC 2017 test suite, a single
meta-trained OPAL policy is statistically competitive with state-
of-the-art adaptive differential evolution variants and achieves
significant improvements over simpler baselines under nonpara-
metric tests. Ablation studies on CEC 2017 justify the choices
for the design phase, the trajectory graph, and the operator-
program representation, while the meta-components add only
modest wall-clock overhead. Overall, the results indicate that
operator-programmed, landscape-aware per-instance design is a
practical way forward beyond ad hoc metaphor-based algorithms
in black-box optimization.
Index Terms—Black-box optimization, evolutionary computa-
tion, hyper-heuristics, meta-learning, graph neural networks.
I. INTRODUCTION
C
ONTINUOUS black-box optimization (BBO) lies at
the core of many engineering, control, and machine
learning applications. In these settings, the objective func-
tion is expensive, derivative-free, noisy, or multimodal, and
This research is financially supported by the National Natural Science Foun-
dation of China (Grant No. 62076185, 62301367). (Corresponding authors:
Jun Zhang & Huiling Chen.)
Junbo
Jacob
Lian
is
with
the
McCormick
School
of
Engi-
neering,
Northwestern
University,
Evanston,
IL,
USA
(e-mail:
Jacoblian@u.northwestern.edu).
Mingyang Yu is with the College of Artificial Intelligence, Nankai Univer-
sity, Tianjin, China (e-mail: 1120240312@mail.nankai.edu.cn).
Kaichen
Ouyang
is
with
the
School
of
Mathematics,
University
of
Science
and
Technology
of
China,
Hefei,
China
(e-mail:
oykc@mail.ustc.edu.cn).
Shengwei Fu is with Guizhou University, Guiyang, China (e-mail:
gs.swfu22@gzu.edu.cn).
Yujun Zhang is with the School of New Energy, Jingchu University of
Technology, Jingmen, China (e-mail: zhangyj069@gmail.com).
Rui Zhong is with the Information Initiative Center, Hokkaido University,
Sapporo, Japan (e-mail: zhongrui@iic.hokudai.ac.jp).
Jun Zhang is with the College of Artificial Intelligence, Nankai University,
Tianjin, China (e-mail: junzhang@nankai.edu.cn).
Huiling
Chen
is
with
the
School
of
Computer
Science
and
Artificial
Intelligence,
Wenzhou
University,
Wenzhou,
China
(e-mail:
chenhuiling.jlu@gmail.com).
Source code, experiment scripts, and results are publicly available at https:
//github.com/junbolian/OPAL.
practitioners typically rely on population-based metaheuris-
tics such as differential evolution (DE) and particle swarm
optimization (PSO) [1]–[3]. Over the last two decades, the
field has produced a large ecosystem of increasingly so-
phisticated variants—for example L-SHADE [4] and jSO [5]
in the DE family [6]—that achieve strong performance on
standard benchmarks but remain highly problem-dependent.
The No Free Lunch theorems for optimization make this
dependence formal: averaged over all possible problems, no
single algorithm or configuration can dominate all others [7].
In practice, even within a single problem instance, algorithmic
needs change over time as the search progresses from global
exploration to local exploitation [8].
A natural response has been to use machine learning to
support or replace human design. One line of work builds
per-instance algorithm selectors and configurators: a feature
extractor characterizes the problem, and a model predicts
which algorithm or parameter setting will perform best [9],
[10]. Exploratory landscape analysis (ELA) plays a central
role in this program: it maps sampled points into numerical
descriptors of modality, ruggedness, conditioning, and other
properties, which are then fed into supervised models for
solver selection or performance prediction [10], [11]. Recent
surveys document a rapid growth in such ML-assisted meta-
heuristics, covering both single-objective and multiobjective
settings and highlighting hybrid designs where learned models
steer classical metaheuristics [12].
A second line of work treats the optimizer itself as a
dynamical system and learns to adapt its parameters on-
line. Automated and dynami