SensHRPS: Sensing Comfortable Human-Robot Proxemics and Personal Space With Eye-Tracking
Reading time: 5 minute
...
📝 Original Info
Title: SensHRPS: Sensing Comfortable Human-Robot Proxemics and Personal Space With Eye-Tracking
ArXiv ID: 2512.08518
Date: 2025-12-09
Authors: Nadezhda Kushina, Ko Watanabe, Aarthi Kannan, Ashita Ashok, Andreas Dengel, Karsten Berns
📝 Abstract
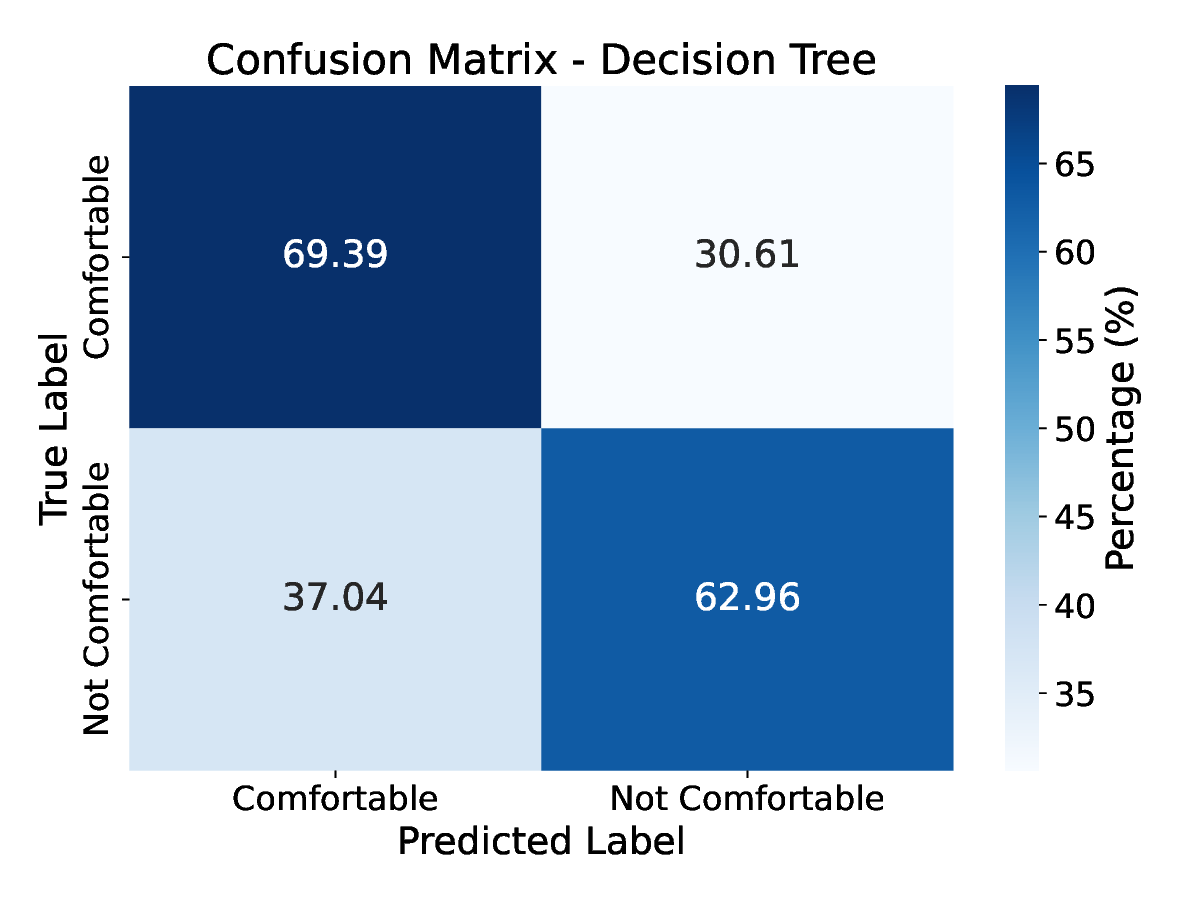
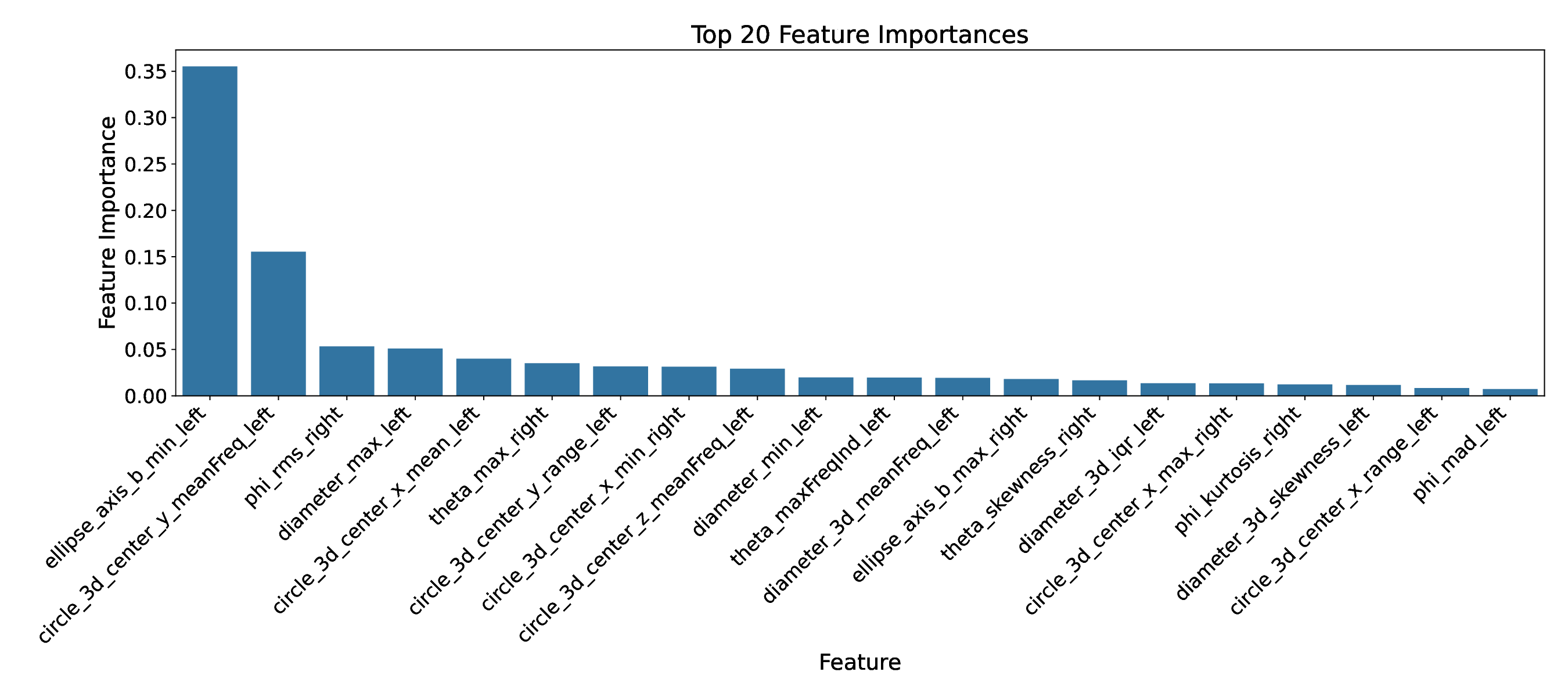
Social robots must adjust to human proxemic norms to ensure user comfort and engagement. While prior research demonstrates that eye-tracking features reliably estimate comfort in human-human interactions, their applicability to interactions with humanoid robots remains unexplored. In this study, we investigate user comfort with the robot "Ameca" across four experimentally controlled distances (0.5 m to 2.0 m) using mobile eye-tracking and subjective reporting (N=19). We evaluate multiple machine learning and deep learning models to estimate comfort based on gaze features. Contrary to previous human-human studies where Transformer models excelled, a Decision Tree classifier achieved the highest performance (F1-score = 0.73), with minimum pupil diameter identified as the most critical predictor. These findings suggest that physiological comfort thresholds in human-robot interaction differ from human-human dynamics and can be effectively modeled using interpretable logic.
💡 Deep Analysis
📄 Full Content
In human-robot interaction (HRI), a robot's nonverbal cues often determine the emotional resonance of an interaction more than the spoken content. Even if a robot delivers a benign phrase, behavioral misalignments, such as a fixed stare or intrusive proximity, can transform a standard exchange into an unnerving experience. Therefore, robots must adhere to human conversational norms to ensure user satisfaction and continued engagement (Henschel et al., 2020;Hedayati and Kanda, 2023). Personal space is particularly dynamic and context-sensitive; violations induce discomfort and stress, making proxemic alignment a foundational requirement for effective HRI (Watanabe et al., 2025;Petrak et al., 2019).
Highly anthropomorphic robot designs often trigger the uncanny valley effect, increasing the interpersonal distance required for user comfort (Berns and Ashok, 2024;Lanfranchi and Lemonnier, 2023). Robot attributes such as appearance and height further influence these preferences (Walters et al., 2009). These factors are particularly relevant for tall social humanoid robots (SHRs) (see Research, Social & Entertainment humanoids 1 ), such as the Gen 1 Ameca robot from Engineered Arts 2 , whose physical form may amplify users’ distance preferences.
Research in human-robot proxemics (HRP) provides valuable insights but also reveals inconsistencies in how distance 1 https://www.merphi.se/download-robotic-poster/
2 https://engineeredarts.com/robots/ameca
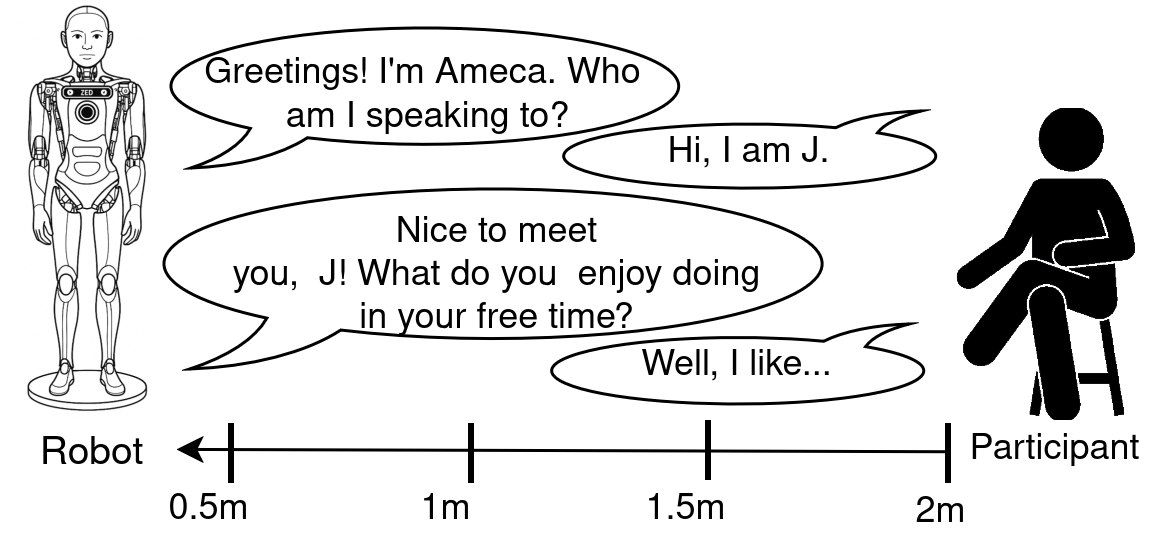
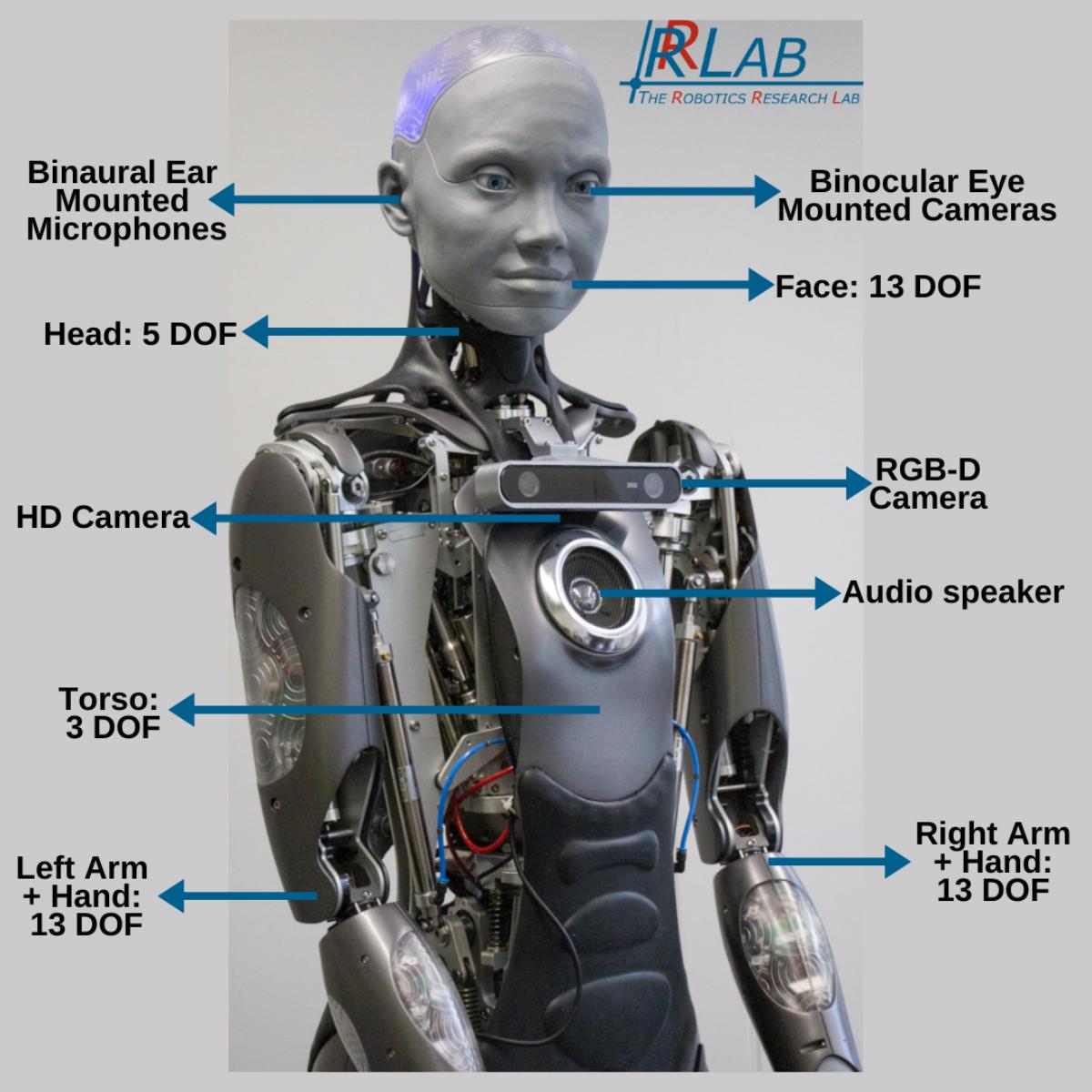
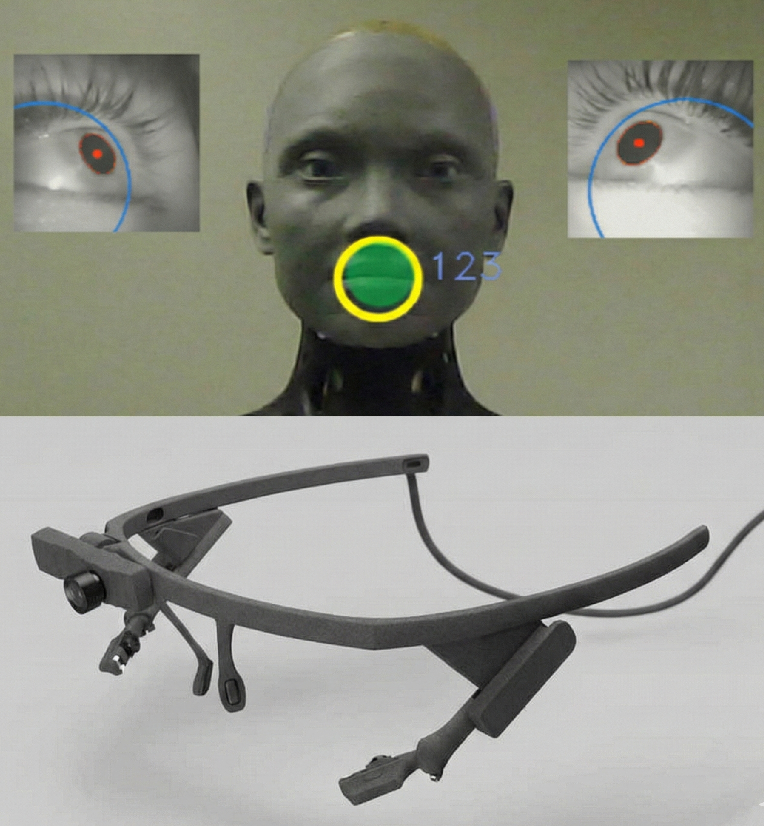
shapes interaction quality. While HRP has been examined across various contexts, results vary significantly based on experimental setup (Samarakoon et al., 2022). Notably, prior work has not examined how interlocutors experience comfort or discomfort with a tall, highly anthropomorphic, yet immobile humanoid robot at fixed and systematically varied distances. Furthermore, methodologies for assessing comfort typically rely on explicit, subjective measures, such as participantchosen distances or static questionnaires. While adaptive proxemic systems increasingly account for user posture, behavior, and traits (Samarakoon et al., 2022), the use of implicit physiological signals remains limited. Watanabe et al. (2025) recently demonstrated that gaze-based features reliably predict comfort in human-human interactions across controlled distances. However, it remains unclear whether these signals generalize to interactions with highly anthropomorphic humanoid robots, whose appearance, social presence, and immobility may alter comfort dynamics. To address this gap, we investigate how users experience robot Ameca (see Fig. 1) at fixed distances during unconstrained small talk while wearing eye-tracking glasses. We utilize small talk because it facilitates humanrobot communication (Babel et al., 2021;Ashok et al., 2024). By experimentally controlling distance, we aim to correlate specific gaze metrics with user comfort levels in real-time. Our goal is to identify objective physiological thresholds for discomfort that can inform future adaptive robot behaviors. This leads to the research questions: Fig. 1. The social robot deployed in this study is “Ameca”.
Anthropomorphic Robot made by Engineered Arts.
• RQ1: Can we estimate human-robot proxemics and personal space using gaze features? • RQ2: Which gaze features enable estimation of user comfort during HRI with highly anthropomorphic SHR?
Individuals tend to perceive the area around them as their personal space. The violation of this “invisible zone” causes negative feelings, such as threat and discomfort (Miller et al., 2021).While researchers distinguish between interpersonal space (human-human) and peripersonal space (human-environment) (Coello and Cartaud, 2021), HRI blurs these lines. Physical robots trigger a distinct cognitive frame of mind in which users experience them as real, co-present agents, creating stronger expectations for appropriate interpersonal spacing and proxemic awareness, especially for social humanoids, which are perceived as active participants in interpersonal space (Mutlu, 2020;Petrak et al., 2019).
Recent reviews indicate that proxemic preferences remain highly context-dependent and sensitive to robot morphology (Yamanaka et al., 2024;Samarakoon et al., 2022).
Robots elicit stronger reactions when invading personal space and result in lower overall comfort. Preferred distances vary substantially depending on robot size, movement direction, facial expressivity, and social role, with taller or more human-like robots often eliciting greater preferred spacing Babel et al. (2021); Yamanaka et al. (2024). The existing literature is characterized by significant methodological heterogeneity in tasks and measurement techniques (Samarakoon et al., 2022). Although these studies provide important descriptive accounts of HRP, their heterogeneity illustrates that proxemic preferences are highly context dependent, making it difficult to generalize comfortable distances.