Title: An AI-Powered Autonomous Underwater System for Sea Exploration and Scientific Research
ArXiv ID: 2512.07652
Date: 2025-12-08
Authors: ** - Mariam Al Nasseri (2nd author) – College of Technological Innovation, Zayed University, Abu Dhabi, UAE (202111707@zu.ae) - Hamad Almazrouei (1st author) – College of Technological Innovation, Zayed University, Abu Dhabi, UAE (201912368@zu.ae) - Maha Alzaabi (3rd author) – College of Technological Innovation, Zayed University, Abu Dhabi, UAE (202104533@zu.ae) **
📝 Abstract
Traditional sea exploration faces significant challenges due to extreme conditions, limited visibility, and high costs, resulting in vast unexplored ocean regions. This paper presents an innovative AI-powered Autonomous Underwater Vehicle (AUV) system designed to overcome these limitations by automating underwater object detection, analysis, and reporting. The system integrates YOLOv12 Nano for real-time object detection, a Convolutional Neural Network (CNN) (ResNet50) for feature extraction, Principal Component Analysis (PCA) for dimensionality reduction, and K-Means++ clustering for grouping marine objects based on visual characteristics. Furthermore, a Large Language Model (LLM) (GPT-4o Mini) is employed to generate structured reports and summaries of underwater findings, enhancing data interpretation. The system was trained and evaluated on a combined dataset of over 55,000 images from the DeepFish and OzFish datasets, capturing diverse Australian marine environments. Experimental results demonstrate the system's capability to detect marine objects with a mAP@0.5 of 0.512, a precision of 0.535, and a recall of 0.438. The integration of PCA effectively reduced feature dimensionality while preserving 98% variance, facilitating K-Means clustering which successfully grouped detected objects based on visual similarities. The LLM integration proved effective in generating insightful summaries of detections and clusters, supported by location data. This integrated approach significantly reduces the risks associated with human diving, increases mission efficiency, and enhances the speed and depth of underwater data analysis, paving the way for more effective scientific research and discovery in challenging marine environments.
💡 Deep Analysis
📄 Full Content
An AI-Powered Autonomous Underwater System
for Sea Exploration and Scientific Research
2nd Mariam Al Nasseri
College of Technological Innovation
Zayed University
Abu Dhabi, United Arab Emirates
202111707@zu.ae.ac
1st Hamad Almazrouei
College of Technological Innovation
Zayed University
Abu Dhabi, United Arab Emirates
201912368@zu.ae.ac
3rd Maha Alzaabi
College of Technological Innovation
Zayed University
Abu Dhabi, United Arab Emirates
202104533@zu.ae.ac
Abstract—Traditional sea exploration faces significant chal-
lenges due to extreme conditions, limited visibility, and high
costs, resulting in vast unexplored ocean regions. This paper
presents an innovative AI-powered Autonomous Underwater
Vehicle (AUV) system designed to overcome these limitations by
automating underwater object detection, analysis, and reporting.
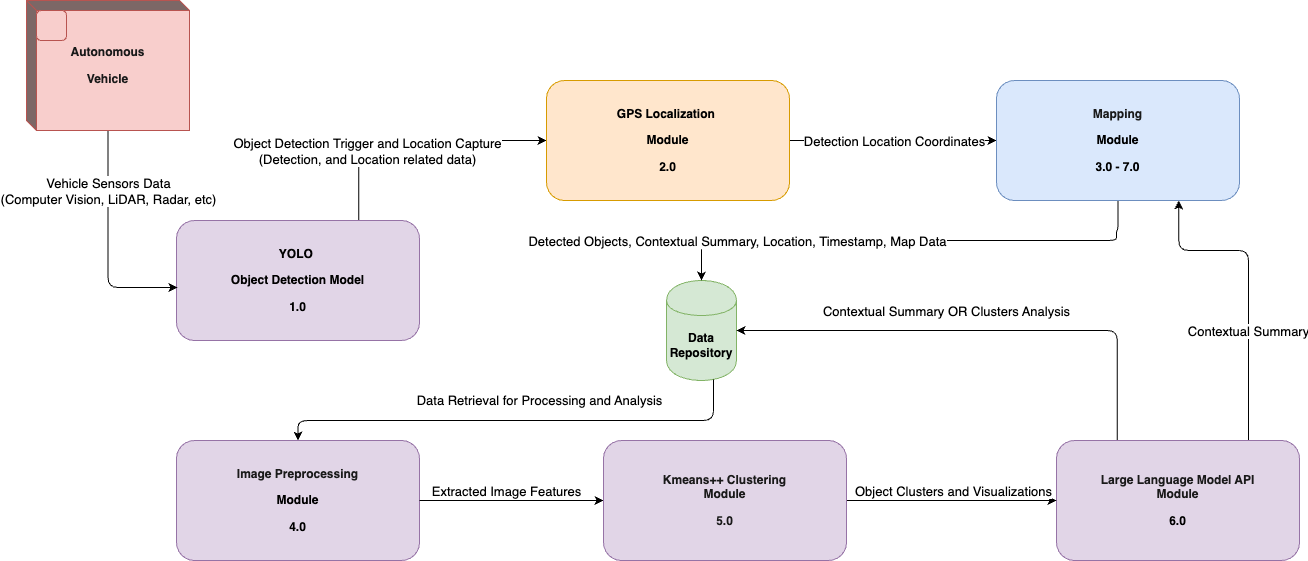
The system integrates YOLOv12 Nano for real-time object
detection, a Convolutional Neural Network (CNN) (ResNet50)
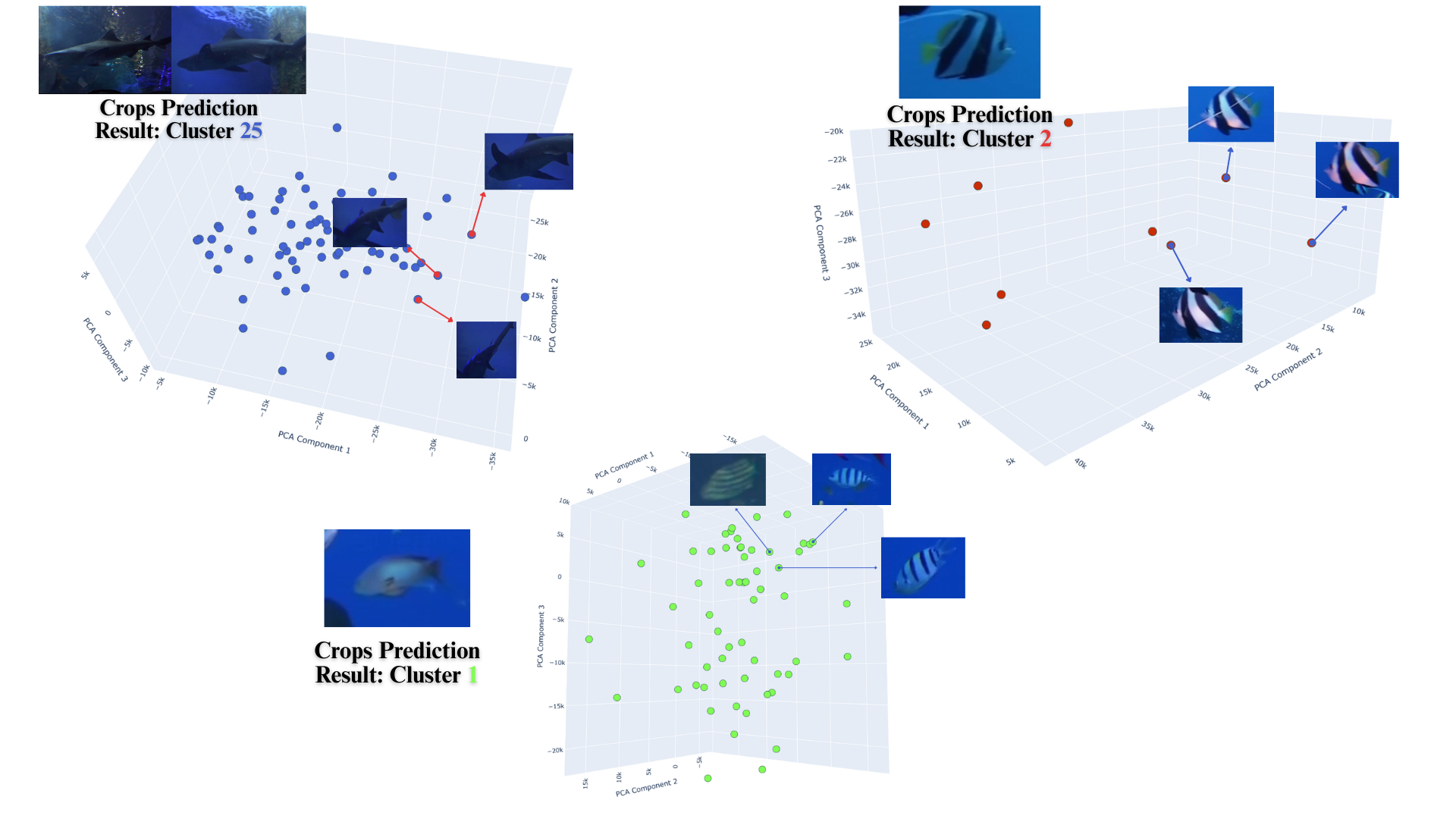
for feature extraction, Principal Component Analysis (PCA)
for dimensionality reduction, and K-Means++ clustering for
grouping marine objects based on visual characteristics. Fur-
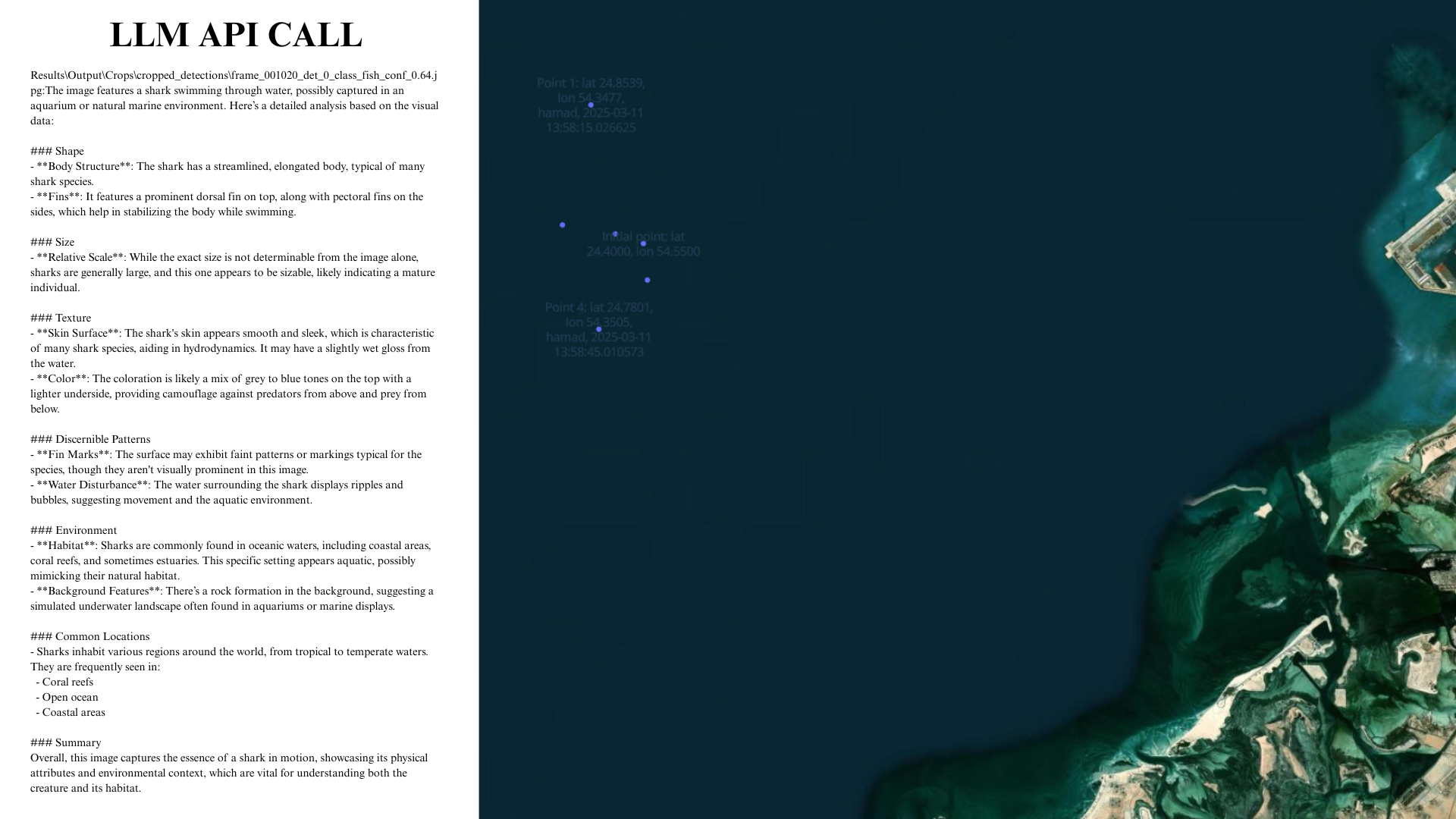
thermore, a Large Language Model (LLM) (GPT-4o Mini) is
employed to generate structured reports and summaries of
underwater findings, enhancing data interpretation. The system
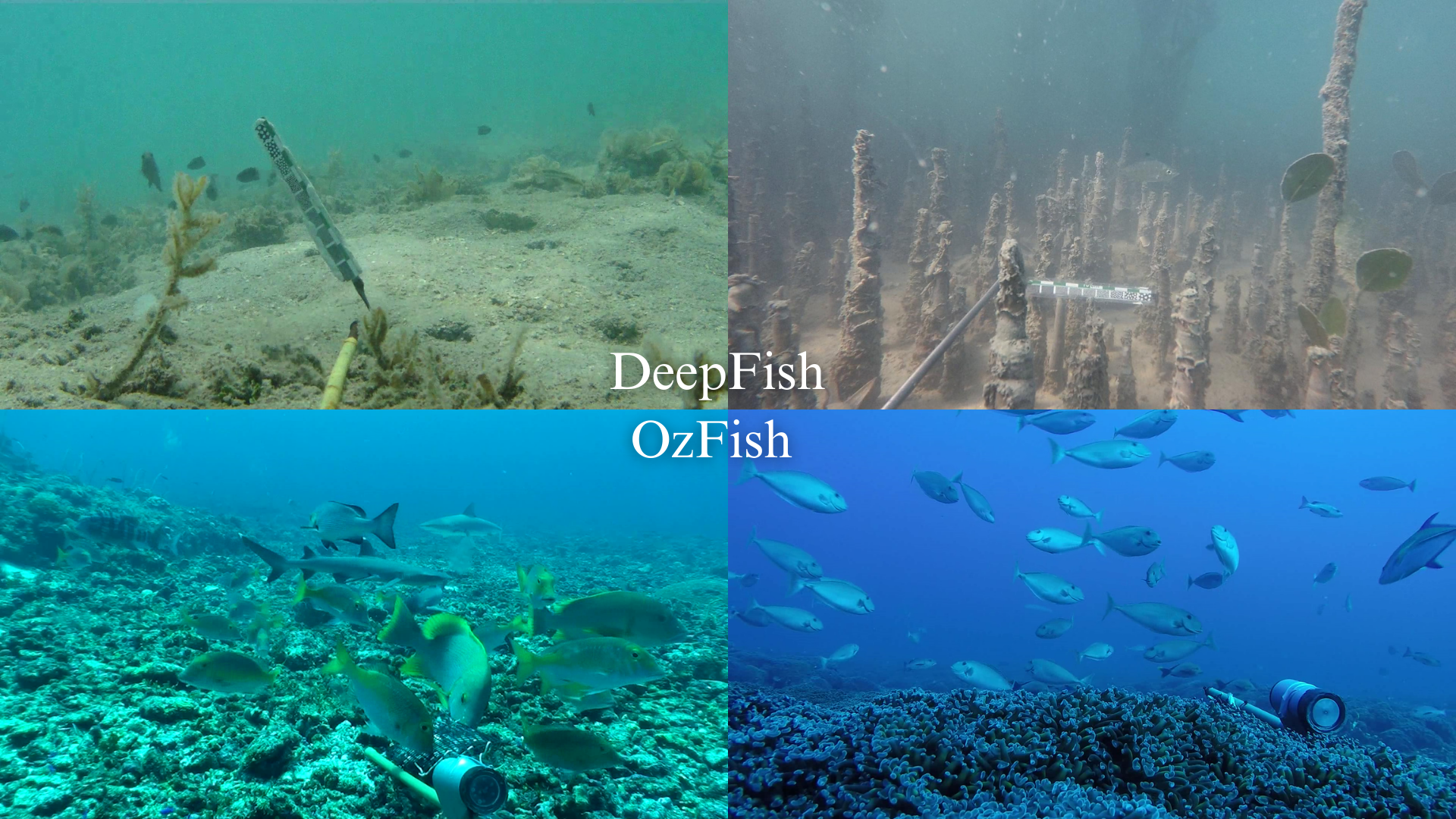
was trained and evaluated on a combined dataset of over
55,000 images from the DeepFish and OzFish datasets, capturing
diverse Australian marine environments. Experimental results
demonstrate the system’s capability to detect marine objects with
a mAP@0.5 of 0.512, a precision of 0.535, and a recall of 0.438.
The integration of PCA effectively reduced feature dimensionality
while preserving 98% variance, facilitating K-Means clustering
which successfully grouped detected objects based on visual
similarities. The LLM integration proved effective in generating
insightful summaries of detections and clusters, supported by
location data. This integrated approach significantly reduces the
risks associated with human diving, increases mission efficiency,
and enhances the speed and depth of underwater data analysis,
paving the way for more effective scientific research and discovery
in challenging marine environments.
Index Terms—Autonomous Underwater Vehicles (AUVs), Ob-
ject Detection, Deep Learning, Underwater Exploration, K-
Means Clustering
I. INTRODUCTION
A. Background
The sea remains one of the most mysterious and least
explored regions of our planet. To begin with, extreme con-
ditions, including high pressure, poor visibility, and unpre-
dictable underwater landscapes, pose significant challenges
to traditional exploration methods, making them dangerous,
costly, and limited in effectiveness. In fact, despite covering
over 70% of Earth’s surface, only about 5% of the ocean
has been fully explored, underscoring the vast unknowns that
persist due to these challenging conditions [1]. In addition,
human divers face substantial risks and data collection is often
slow and incomplete. For example, typical dive durations are
limited to less than an hour (approximately 50 minutes) due
to air supply constraints, and marine data collected manually
can take weeks to analyze and validate, significantly slowing
scientific progress [2]. However, recent advancements in Arti-
ficial Intelligence (AI) and autonomous systems are creating
new opportunities. As a result, by combining Computer
Vision, Machine Learning, and Automated Reporting, sea
exploration can now become safer, faster, and more in-
sightful. Therefore, AI-powered AUVs equipped with real-
time image processing and autonomous navigation are already
demonstrating superior performance in identifying marine
species and environmental anomalies compared to traditional
methods [3].
B. Project Overview
This project presents an AI-powered Autonomous Un-
derwater Vehicle (AUV) System designed to transform sea
exploration. The system integrates YOLOv12 (You Only Look
Once) for real-time object detection with a Large Language
Model (LLM) that generates structured reports and summaries
of underwater findings, focusing on detected objects and
clusters. It is capable of detecting and assigning marine objects
to pre-defined clusters, including both known and unknown
types, and automatically produces detailed reports to support
scientific research, environmental monitoring, and future ocean
discoveries. Furthermore, K-Means clustering is applied to
analyze patterns in marine biodiversity, enabling improved
classification and ecosystem understanding.
C. Scope
By deploying this autonomous system, the project aims to
reduce the risks associated with human diving, increase the
efficiency and speed of underwater missions, and overcome
environmental challenges such as low visibility and physical
obstacles. Autonomous systems are increasingly replacing
human divers in hazardous environments, improving safety
while significantly increasing the volume and speed of data
collection [4]. Energy optimization is a