Inverse design aims to design the input variables of a physical system to optimize a specified objective function, typically formulated as a search or optimization problem. However, in 3D domains, the design space grows exponentially, rendering exhaustive grid-based searches infeasible. Recent advances in deep learning have accelerated inverse design by providing powerful generative priors and differentiable surrogate models. Nevertheless, current methods tend to approximate the 3D design space using 2D projections or fine-tune existing 3D shapes. These approaches sacrifice volumetric detail and constrain design exploration, preventing true 3D design from scratch. In this paper, we propose a 3D Inverse Design (3DID) framework that directly navigates the 3D design space by coupling a continuous latent representation with a physics-aware optimization strategy. We first learn a unified physics-geometry embedding that compactly captures shape and physical field data in a continuous latent space. Then, we introduce a two-stage strategy to perform physics-aware optimization. In the first stage, a gradient-guided diffusion sampler explores the global latent manifold. In the second stage, an objective-driven, topology-preserving refinement further sculpts each candidate toward the target objective. This enables 3DID to generate high-fidelity 3D geometries, outperforming existing methods in both solution quality and design versatility.
Inverse design seeks to identify the initial variables of a physical system that, under given constraints, optimizes a specified objective function. This fundamental challenge occurs across many scientific and engineering disciplines, such as materials science, mechanical engineering, aerospace design, and supports applications ranging from automotive body shaping [1] and nano-photonic device engineering [2] to mechanical materials design [3,4] and physics detector development [5].
Despite its broad impact, efficiently exploring the design space toward a target objective presents significant challenges. First, inverse design must contend with the inherent complexity of simulating physical systems for evaluation. These simulations are often nonlinear and high-dimensional, requiring fine discretizations that dominate computational resources [6,7]. Second, the design landscape is extremely large, inherently nonconvex, and riddled with local minima, making exhaustive global search infeasible [8,9]. In 3D domains, where inverse design usually involves direct geometry optimization, the number of degrees of freedom grows exponentially [10]. This rapid growth in geometric complexity drives up simulation expense and intensifies the search challenge.
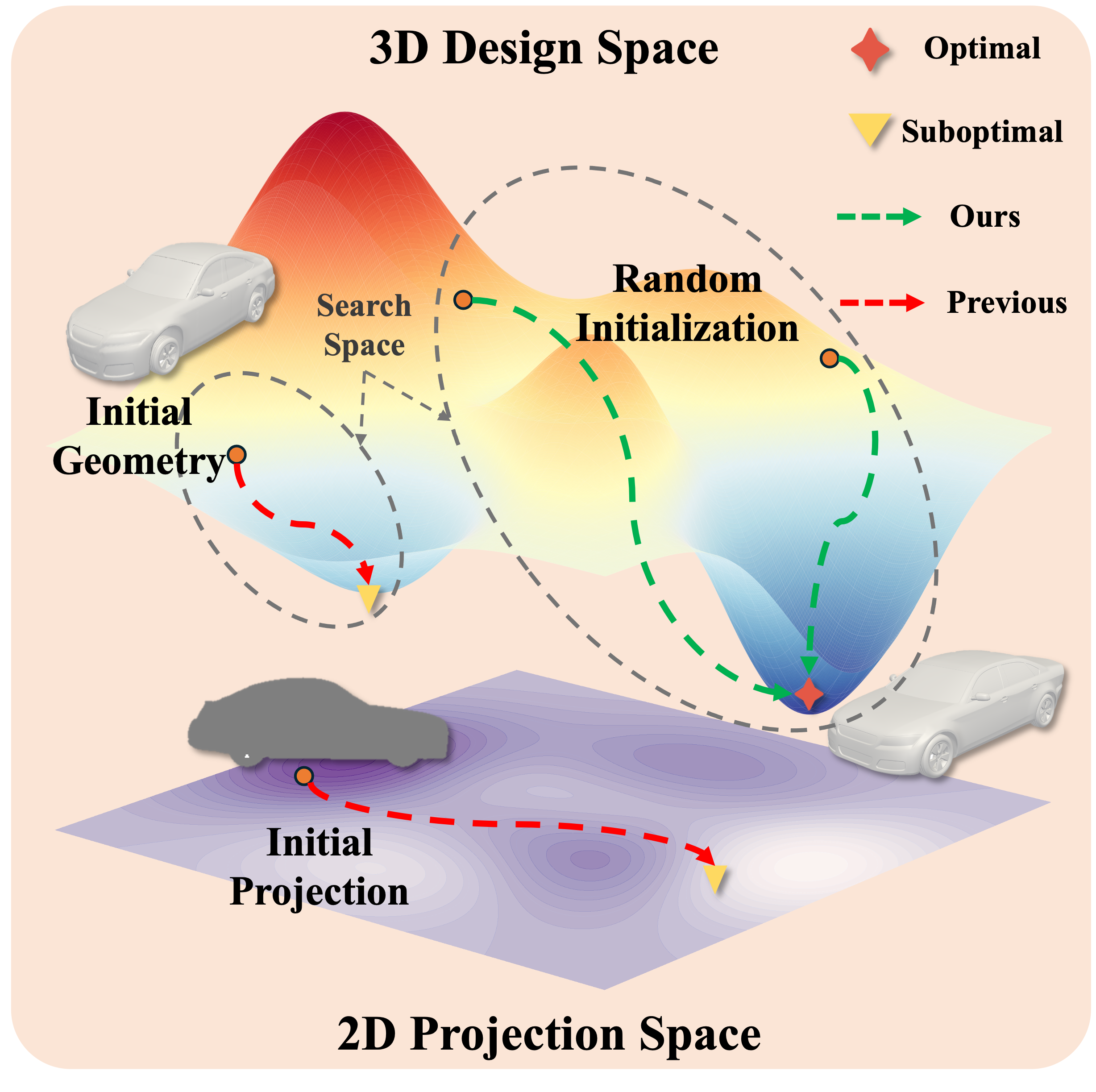
To tackle inverse design in the 3D domain, various techniques have been proposed [1,11,12], yet they fall short of addressing the above challenges. Traditional approaches such as adjoint-based gradient methods [13,14,15] and Bayesian optimization [16,17] provide broad applicability but depend on Figure 1: Motivation of 3DID. Existing 3D inverse-design methods either rely on reduceddimensional representations (2D projections or fixed parameterizations) that constrain design freedom, or require an initial geometry as a starting point for local refinement, which highly constrains the search space. In contrast, 3DID overcomes these limitations by directly exploring the full 3D design space from random initialization. repeated high-fidelity simulations that incur prohibitive computational cost. With recent advances in deep learning, pretrained surrogate models [18,19,20,21] can efficiently approximate the forward physical process and support end-to-end backpropagation to update design variables, speeding up convergence by orders of magnitude. However, many prior methods adopt two simplifications. One replaces the 3D design with 2D proxies [1,11] (multi-view renderings or silhouettes), which removes geometry information. The other requires an initial geometry as the starting point for subsequent refinement [22,23,24]. In practice, both assumptions restrict design exploration and hinder a thorough search of complex 3D design spaces (see Fig. 1). As a result, they cannot support the full exploration of complex three-dimensional design spaces, limiting coverage to a narrow subset of feasible geometries.
We identify two primary challenges in 3D inverse design. 1) The high dimensionality of 3D physicsgeometry-coupled spaces impedes exploration. Inverse design must simultaneously optimize geometric structures while accurately evaluating their resulting physical properties. This coupling, combined with the continuous high-resolution nature of both shape and physical fields, makes the direct 3D exploration extraordinarily difficult. 2) The lack of optimization strategies that balance the exploration-validity trade-off. Refining a baseline geometry with a surrogate model ensures constraint compliance and design validity, but it confines the search to a local neighborhood and can introduce adversarial artifacts when driven too far [25,26]. On the other hand, sampling candidates with a generative model offers broader exploration yet leaves results vulnerable to biases in the training data [27]. Consequently, samples stay tethered to the prior and tend to imitate prevalent patterns rather than pushing toward novel optima.
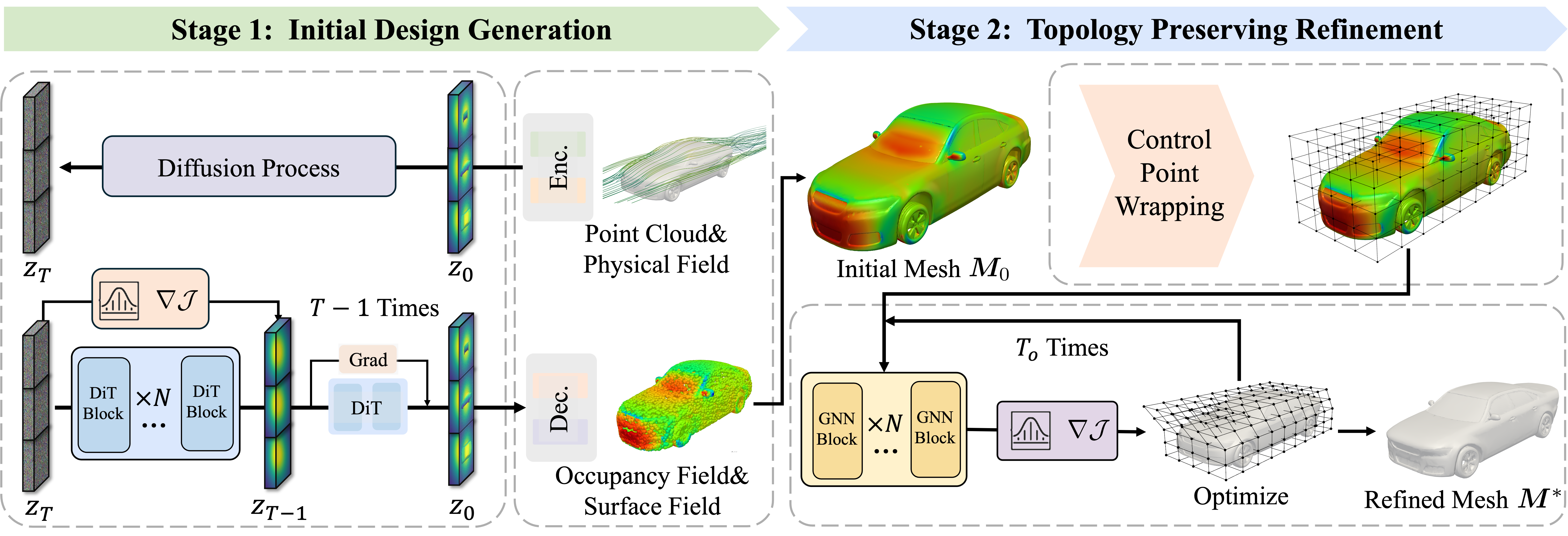
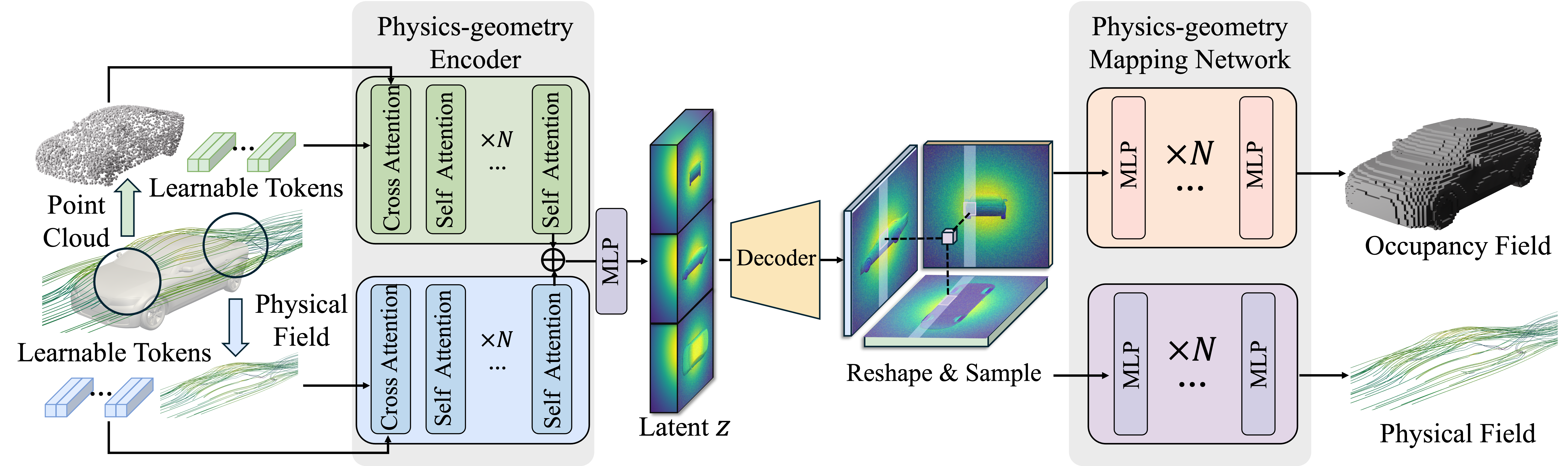
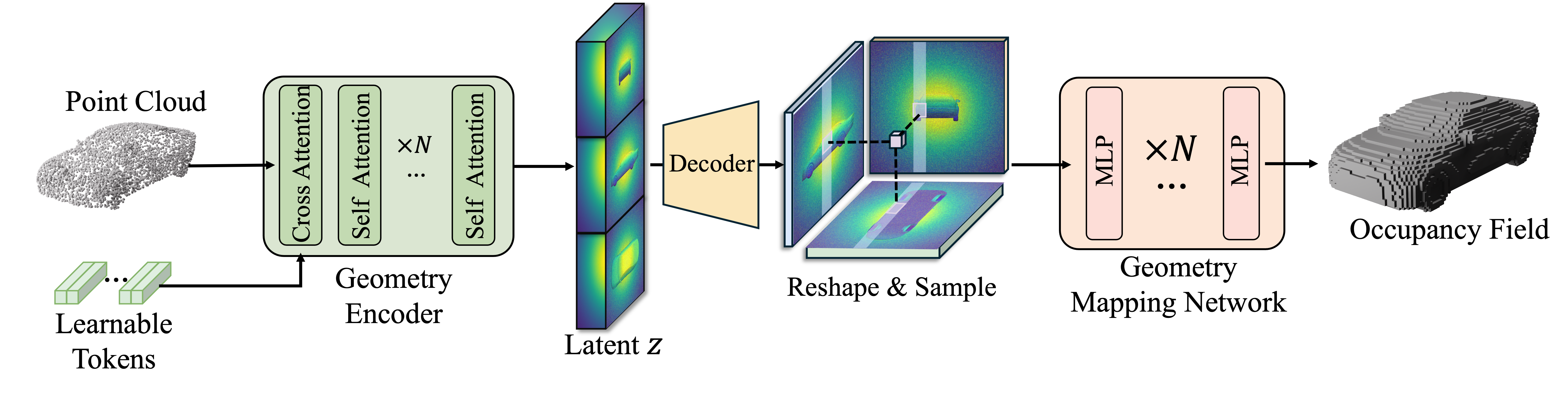
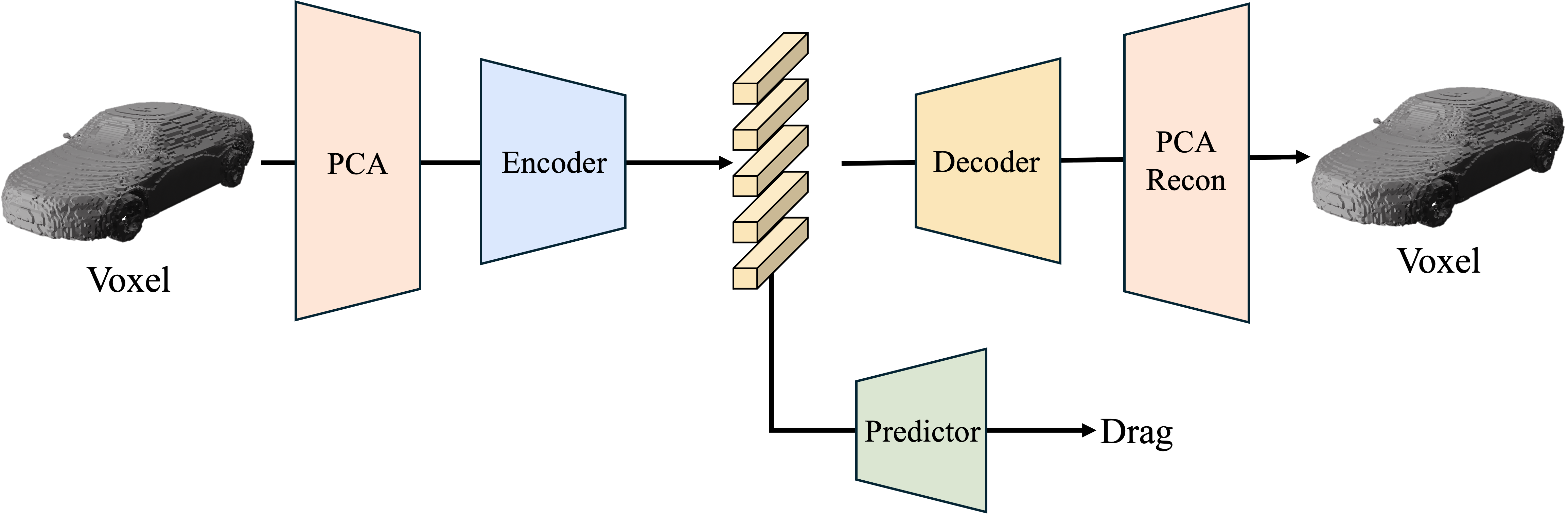
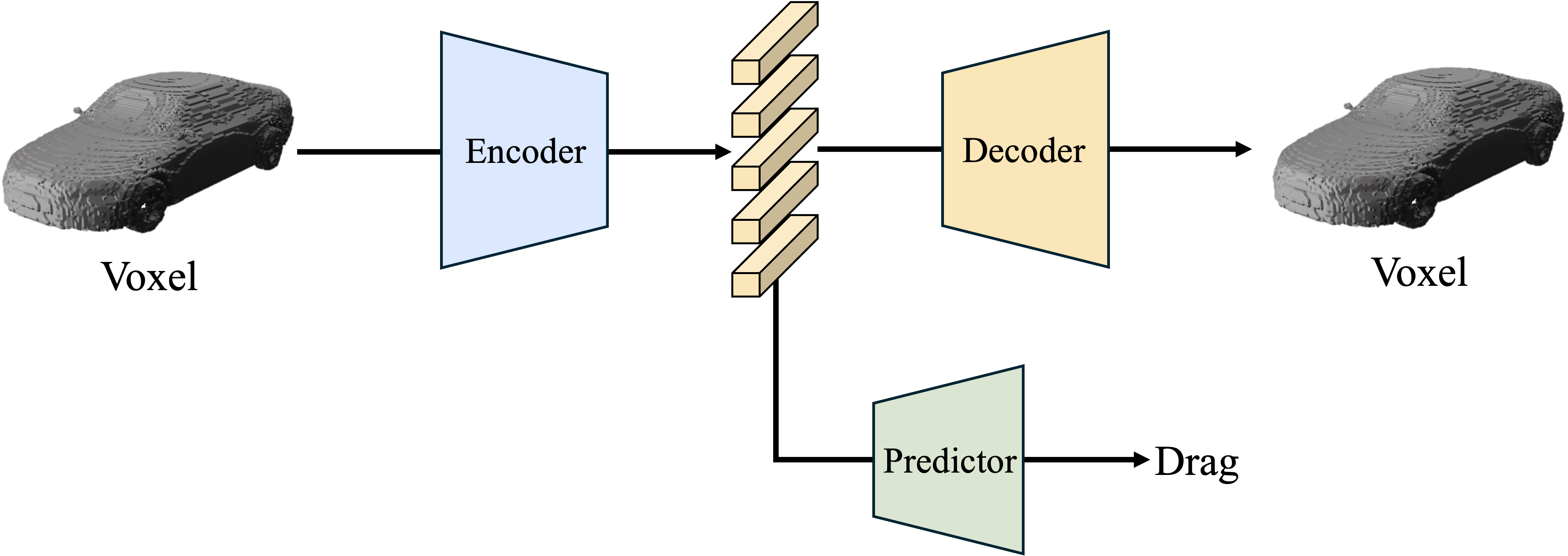
To address these challenges, we introduce 3DID, a 3D inverse-design framework that explores the design space without relying on simplified parameterizations or predefined shapes. Rather than directly searching the prohibitively large, continuous physics-geometry-coupled space, we first learn a continuous physics-geometry unified latent representation. This compact embedding preserves fine-grained shape and physical field variations while dramatically reducing both dimensionality and computational cost, thereby overcoming the dual obstacles of large-scale shape optimization and physics-aware simulation. Building on this latent space, we then deploy a two-stage optimization pipeline to tackle the exploration-validity trade-off. It begins with a gradient-guided diffusion sampler that traverses the manifold from pure noise to generate diverse, physics-informed candidates by steering sampling toward high-performance regions using objective gradients. Each candidate then undergoes topology-preserving optimization, which further improves objective performance under strict m
This content is AI-processed based on open access ArXiv data.