Recent progress in contact-rich robotic manipulation has been striking, yet most deployed systems remain confined to simple, scripted routines. One of the key barriers is the lack of motion planning algorithms that can provide verifiable guarantees for safety, efficiency and reliability. To address this, a family of algorithms called Constant-Time Motion Planning (CTMP) was introduced, which leverages a preprocessing phase to enable collision-free motion queries in a fixed, user-specified time budget (e.g., 10 milliseconds). However, existing CTMP methods do not explicitly incorporate the manipulation behaviors essential for object handling. To bridge this gap, we introduce the \textit{Behavioral Constant-Time Motion Planner} (B-CTMP), an algorithm that extends CTMP to solve a broad class of two-step manipulation tasks: (1) a collision-free motion to a behavior initiation state, followed by (2) execution of a manipulation behavior (such as grasping or insertion) to reach the goal. By precomputing compact data structures, B-CTMP guarantees constant-time query in mere milliseconds while ensuring completeness and successful task execution over a specified set of states. We evaluate B-CTMP on two canonical manipulation tasks in simulation, shelf picking and plug insertion,and demonstrate its effectiveness on a real robot. Our results show that B-CTMP unifies collision-free planning and object manipulation within a single constant-time framework, providing provable guarantees of speed and success for manipulation in semi-structured environments.
Robotic arms have long been used to automate tasks in highly structured and repetitive domains, such as automotive assembly lines and electronics manufacturing. In these settings, manipulators often rely on pre-recorded and replayed motions. However, when variability is introduced, this paradigm becomes fragile: minor changes in the environment can disrupt operation, and significant human effort is required for setup and ongoing maintenance. The fundamental limitation is that real-world manipulation tasks require both collision-free motion planning and precise manipulation behaviors (e.g., grasping, insertion) to work together adaptively. For example, when objects appear in different positions or orientations, the system must dynamically coordinate these two components-something that fixed-motion approaches cannot provide.
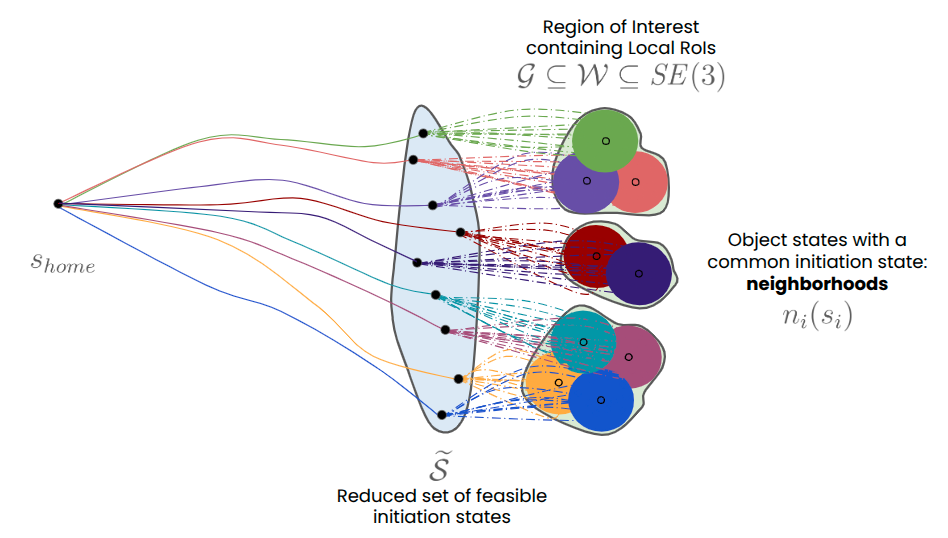
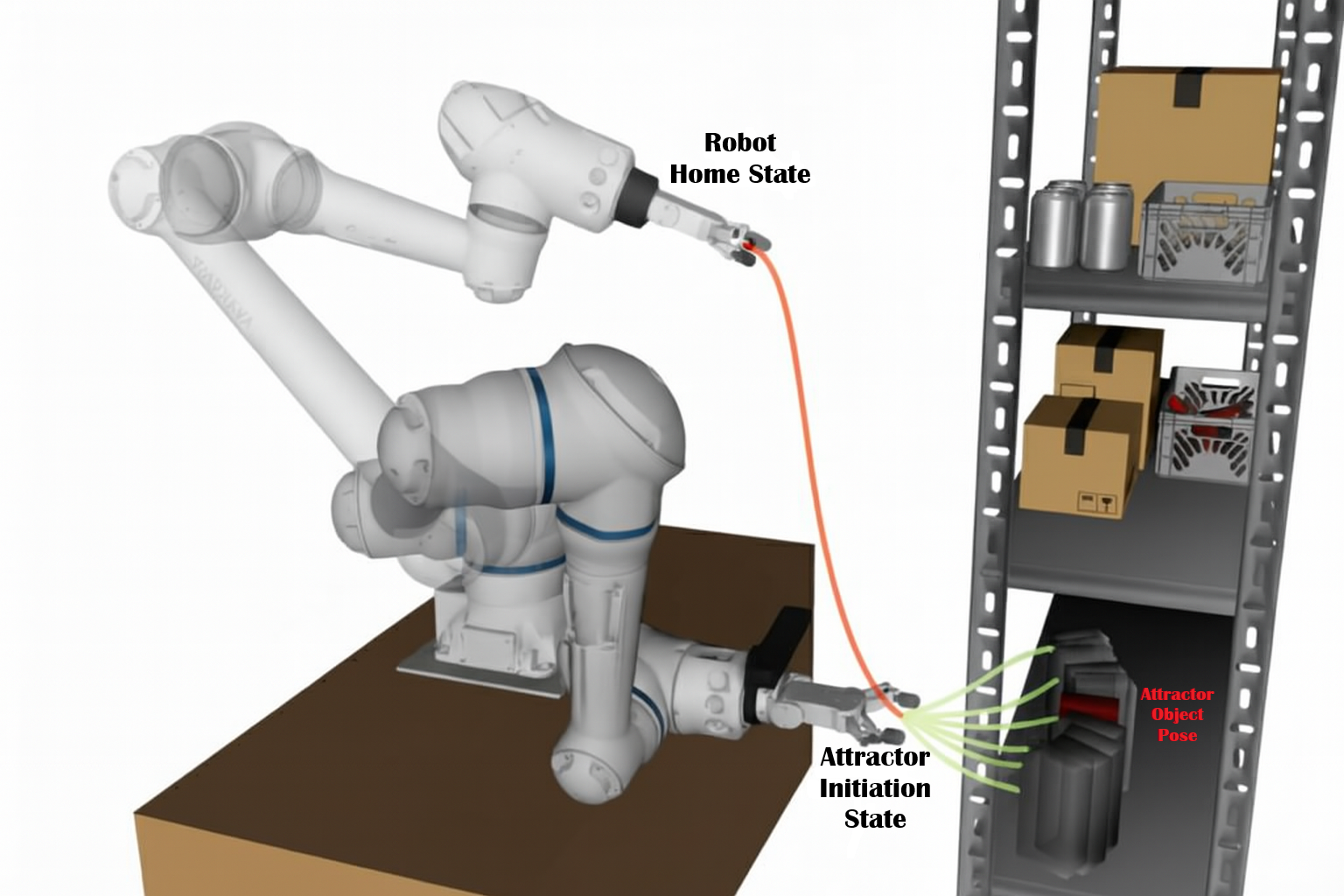
Despite remarkable advances in robotic manipulation research, a persistent gap remains between the capabilities demonstrated in research laboratories and the requirements for real-world industrial deployment. This gap is especially pronounced in dynamic, semi-structured environments such as warehouse shelf picking (e.g., Amazon fulfillment centers [1]), bin picking in logistics, and precision assembly in Fig. 1: Shelf-picking task commonly encountered in industrial warehouse automation. B-CTMP performs a preprocessing phase to compute compact data structures that enable finding a two-phase plan in constant time during online planning. In preprocessing, it caches a set of representative tuples, each containing a path from the robot’s home state to an attractor initiation state (red curve), from which a behavior policy can be executed to reach the target (green curves). manufacturing. A central challenge is the lack of verifiable guarantees on system performance-particularly safety, efficiency, and predictability-which are essential for practitioners in safety-critical and high-throughput applications.
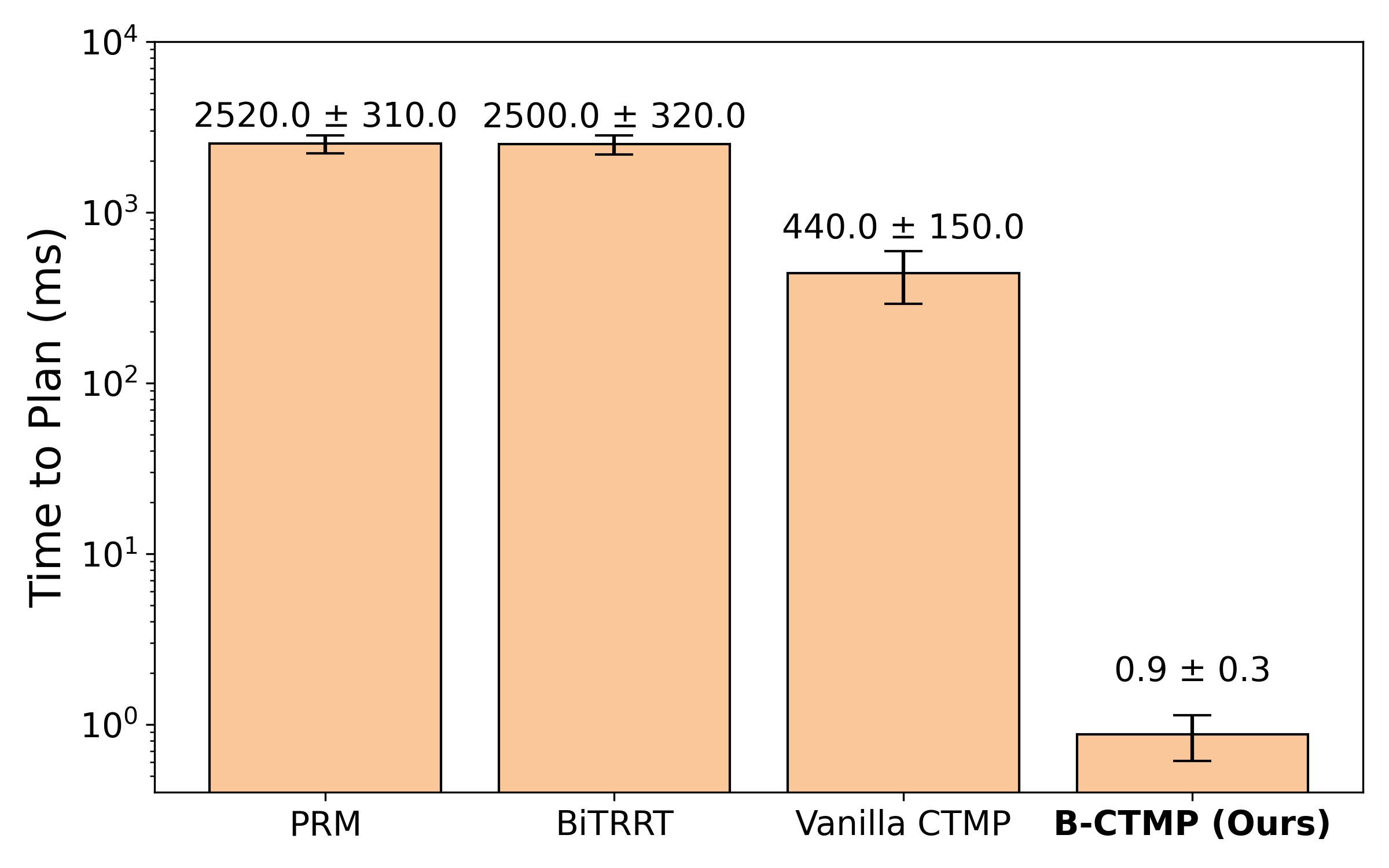
Constant-Time Motion Planning (CTMP) has been recently introduced as a promising framework for generating collision-free motion plans within strict, user-defined time bounds [2], [3], [4], [5]. By leveraging offline computation, CTMP enables online planning of collision-free motions in constant time-often mere milliseconds (e.g., 10 milliseconds)-with guarantees of completeness within a predefined region of interest. However, existing CTMP methods do not explicitly address the manipulation aspect of the task-the part that involves interaction with the environment through manipulation behaviors such as grasping, insertion, or other contact-rich actions. This is a critical limitation, as the success of many real-world tasks depends on the precise execution of these behaviors at the goal.
In this work, we bridge this gap by introducing the Behavioral Constant-Time Motion Planner (B-CTMP). Our approach incorporates manipulation behaviors directly into the preprocessing phase and computes data structures based on the properties of these behaviors, enabling a two-step solution: (1) a collision-free motion to a behavior initiation state, and (2) execution of a manipulation behavior (e.g., grasping or insertion) to achieve the goal condition. B-CTMP guarantees constant-time online queries and ensures that the returned solution is verified to be executable for all possible poses of the manipulated object encountered during execution.
Our main contributions are:
• We propose B-CTMP, a constant-time motion planning algorithm that explicitly integrates manipulation behaviors into the planning process.
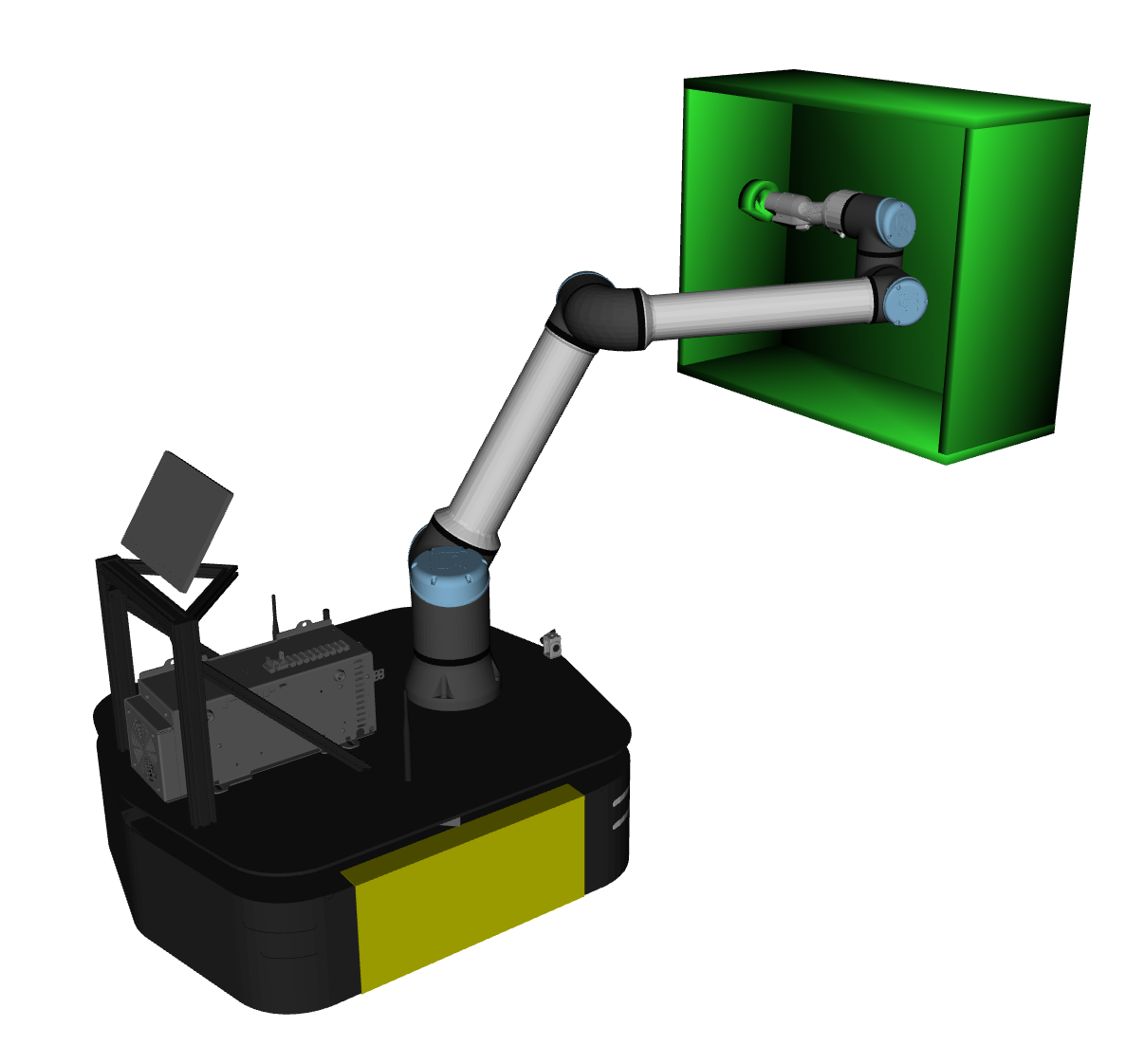
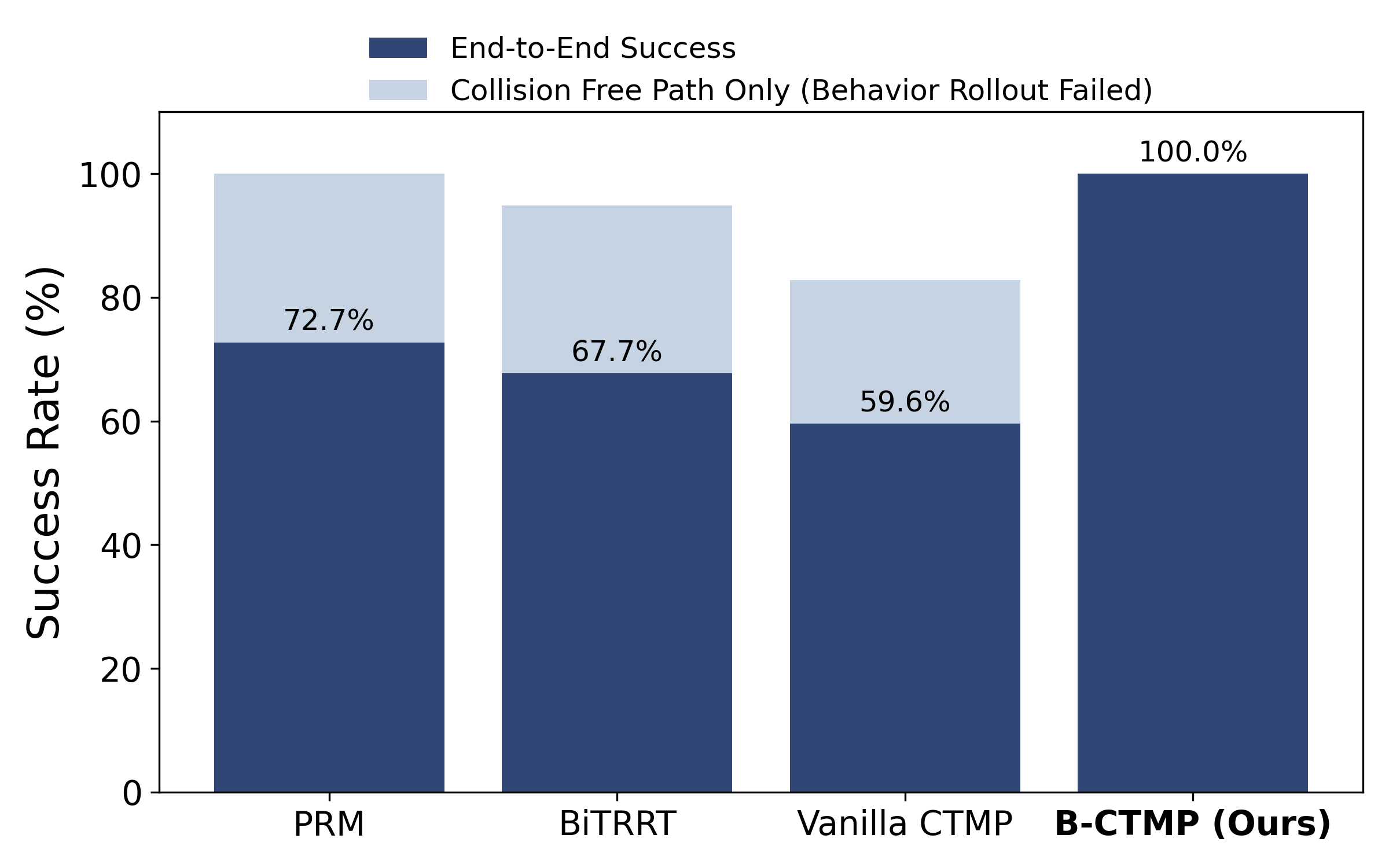
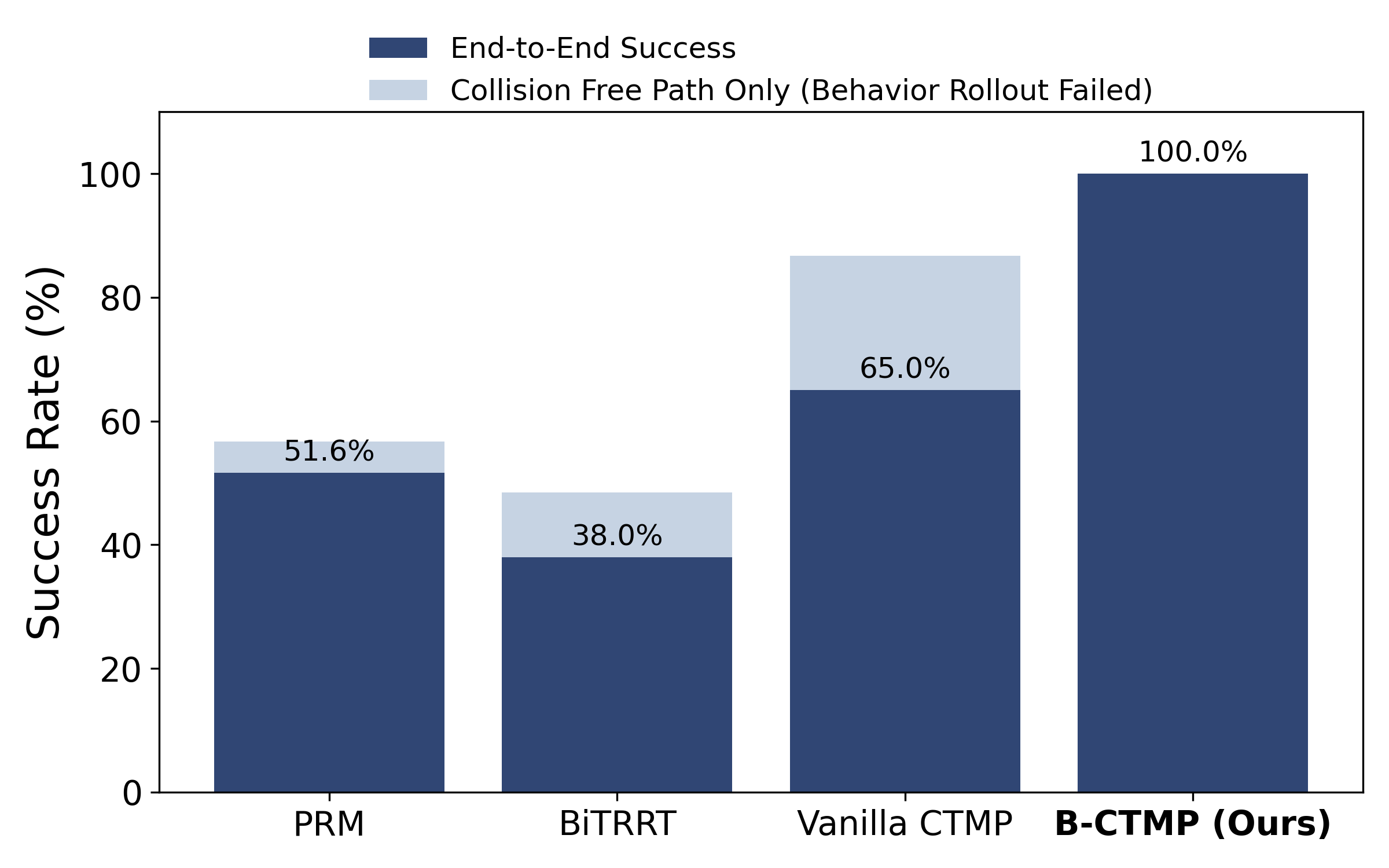
• We demonstrate the effectiveness of B-CTMP on canonical manipulation tasks-including picking from a shelf and insertion-in both simulation and on a real robot. • We provide theoretical analysis of completeness and constant-time performance, making B-CTMP practical for deployment in real-world, semi-structured environments.
B-CTMP builds upon advances in preprocessing-based motion planning and manipulation behavior modeling to enable constant-time planning for contact-rich tasks. We organize the related work into key areas that directly inform our approach: preprocessing methods for collision-free motion planning and approaches for modeling and integrating manipulation behaviors with motion planning.
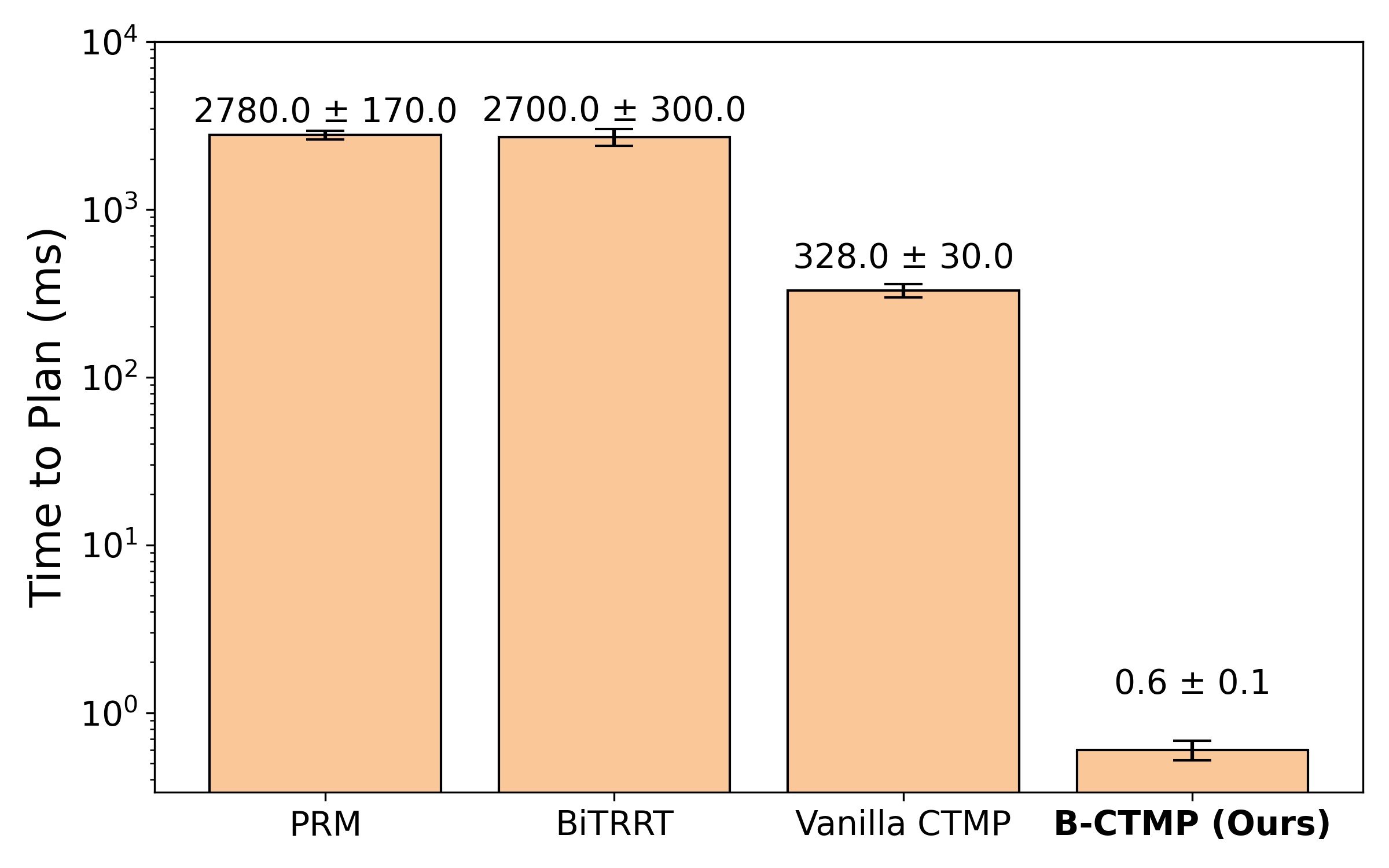
Preprocessing (i.e., offline computations) has been a key component in the development of planning algorithms. The main purpose of preprocessing for collision-free motion planning is to efficiently compute data structures that enable fast real-time planning. The Probabilistic Roadmap (PRM) [6] algorithm and its variants pioneered the approach of reducing the configuration space to a significantly smaller subset of states through roadmap construction, enabling fast online planning. However, PRM does not guarantee solution existence, as success depends on roadmap density and only provides asymptotic completeness guarantees [7]. This leads to substantial decrease in performance as compared to our approach
This content is AI-processed based on open access ArXiv data.