Title: GNSS Jammer Direction Finding in Dynamic Scenarios Using an Inertial-based Multi-Antenna System
ArXiv ID: 2512.05128
Date: 2025-11-23
Authors: Lucas Heublein, Thorsten Nowak, Tobias Feigl, Jaspar Pahl, Felix Ott
📝 Abstract
Jamming devices disrupt signals from the global navigation satellite system (GNSS) and pose a significant threat by compromising the reliability of accurate positioning. Consequently, the detection and localization of these interference signals are essential to achieve situational awareness, mitigating their impact, and implementing effective countermeasures. In this paper, we utilize a two-times-two patch antenna system (i.e., the software defined radio device Ettus USRP X440) to predict the angle, elevation, and distance to the jamming source based on in-phase and quadrature (IQ) samples. We propose to use an inertial measurement unit (IMU) attached to the antenna system to predict the relative movement of the antenna in dynamic scenarios. We present a synthetic aperture system that enables coherent spatial imaging using platform motion to synthesize larger virtual apertures, offering superior angular resolution without mechanically rotating antennas. While classical angle-of-arrival (AoA) methods exhibit reduced accuracy in multipath environments due to signal reflections and scattering, leading to localization errors, we utilize a methodology that fuses IQ and Fast Fourier Transform (FFT)-computed spectrograms with 22 AoA features and the predicted relative movement to enhance GNSS jammer direction finding.
💡 Deep Analysis
📄 Full Content
GNSS Jammer Direction Finding in Dynamic
Scenarios Using an Inertial-based Multi-Antenna
System
Lucas Heublein∗, Thorsten Nowak†, Tobias Feigl∗, Jaspar Pahl∗, Felix Ott∗
∗Fraunhofer Institute for Integrated Circuits IIS, 90411 N¨urnberg, Germany
†Diehl Defence GmbH & Co. KG, 90552 R¨othenbach an der Pegnitz, Germany
{lucas.heublein, tobias.feigl, jaspar.pahl, felix.ott}@iis.fraunhofer.de
thorsten.nowak@diehl-defence.com
Abstract—Jamming devices disrupt signals from the global
navigation satellite system (GNSS) and pose a significant threat
by compromising the reliability of accurate positioning. Con-
sequently, the detection and localization of these interference
signals are essential to achieve situational awareness, mitigating
their impact, and implementing effective countermeasures. In this
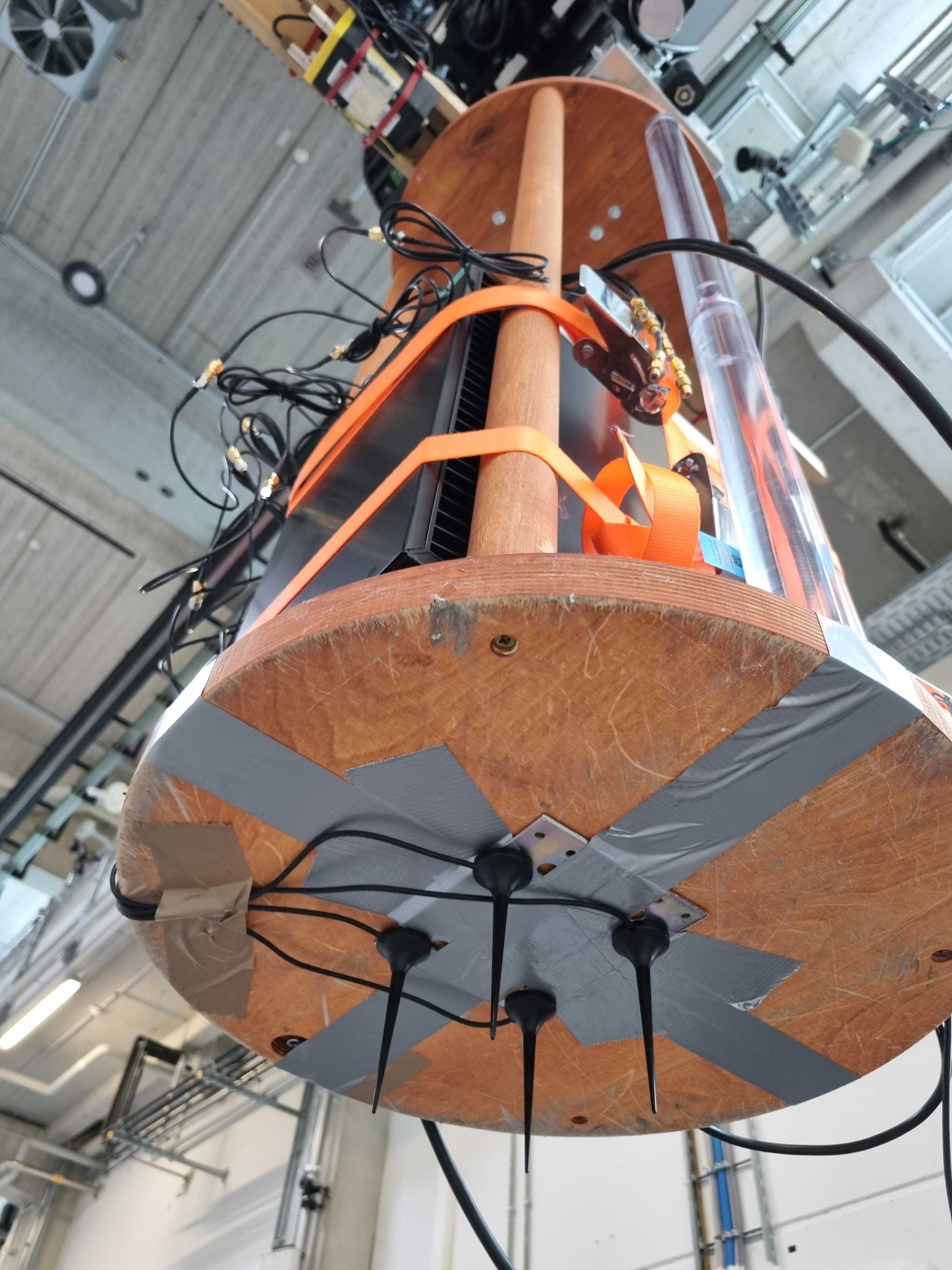
paper, we utilize a two-times-two patch antenna system (i.e., the
software defined radio device Ettus USRP X440) to predict the
angle, elevation, and distance to the jamming source based on
in-phase and quadrature (IQ) samples. We propose to use an
inertial measurement unit (IMU) attached to the antenna system
to predict the relative movement of the antenna in dynamic
scenarios. We present a synthetic aperture system that enables
coherent spatial imaging using platform motion to synthesize
larger virtual apertures, offering superior angular resolution
without mechanically rotating antennas. While classical angle-
of-arrival (AoA) methods exhibit reduced accuracy in multipath
environments due to signal reflections and scattering, leading to
localization errors, we utilize a methodology that fuses IQ and
Fast Fourier Transform (FFT)-computed spectrograms with 22
AoA features and the predicted relative movement to enhance
GNSS jammer direction finding.
Index Terms—Global Navigation Satellite System, Jammer Lo-
calization, Angle of Arrival, Direction of Arrival, IQ Components,
FFT, Machine Learning, Inertial Data1
I. INTRODUCTION
The localization accuracy of GNSS receivers is significantly
compromised by interference signals emitted from jamming
devices [1]–[4]. This problem has intensified in recent years,
primarily due to the widespread availability of inexpensive
jammers. Consequently, it is imperative to either mitigate
the impact of such interference or eliminate its source alto-
gether. Effective countermeasure implementation necessitates
the detection, classification [5], and precise localization of the
interference source.
Traditional jammer localization methodologies – collec-
tively referred to as direction-finding techniques – include
approaches such as Received Signal Strength (RSS), Angle of
Arrival (AoA) [6], [7], Direction of Arrival (DoA) [8], Time
1IEEE DGON Inertial Sensors and Applications (ISA), October 21-22 2025,
Braunschweig, Germany
Difference of Arrival (TDoA), and Frequency Difference of
Arrival (FDoA) [9]. In AoA and DoA-based methods, the
incident direction of the interference signal at the receiver
is estimated [10]. However, these techniques are notably
vulnerable to multipath effects, where reflected signals from
structures such as buildings create multiple propagation paths.
Such reflections can distort angle estimations, resulting in
localization errors [11]. Furthermore, achieving high angular
precision typically demands extensive antenna arrays and
advanced hardware architectures, which substantially increase
system cost and complexity.
Machine learning (ML) approaches have emerged as a
promising solution to overcome the inherent shortcomings of
conventional AoA and DoA techniques in GNSS interference
localization. ML models are capable of learning complex
spatial and statistical patterns from data, enabling them to
effectively characterize and mitigate multipath propagation
effects [11]. By compensating for signal distortions induced
by reflections, these methods enhance the precision of angle
estimation. Moreover, ML-based frameworks can identify ob-
structed propagation environments and adapt their estimations
to maintain robustness under non-line-of-sight (NLoS) con-
ditions [12]. Recent research efforts increasingly emphasize
hybrid architectures that integrate traditional AoA techniques
with ML-based inference models [8], [13], [14] to leverage
the complementary strengths of both domains. The objective
of this work is to develop a framework for the localization of
interference sources in challenging NLoS scenarios dominated
by multipath effects.
In this study, we consider a scenario involving a mobile
antenna receiver and a stationary interference source (jammer).
The primary objective is to estimate the direction from the
moving antenna to the jammer with high accuracy. Unlike
conventional static-array approaches, the mobility of the an-
tenna introduces an additional temporal dimension that can be
exploited to enhance localization performance. By leveraging
the antenna’s trajectory over time, it is possible to construct a
synthetic aperture, effectively increasing the spatial div