USV Obstacles Detection and Tracking in Marine Environments
📝 Original Info
- Title: USV Obstacles Detection and Tracking in Marine Environments
- ArXiv ID: 2511.07950
- Date: 2025-11-11
- Authors: ** 정보 제공되지 않음 **
📝 Abstract
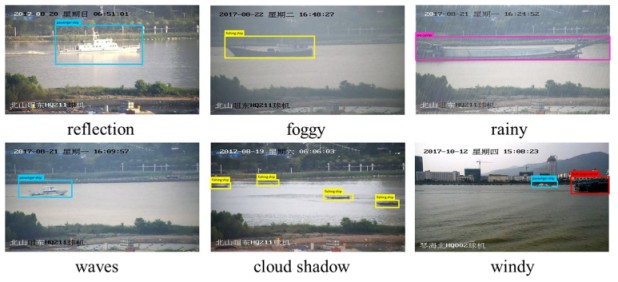
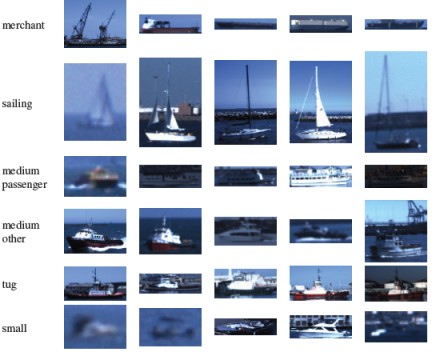
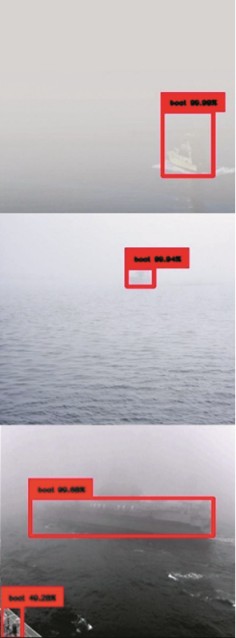
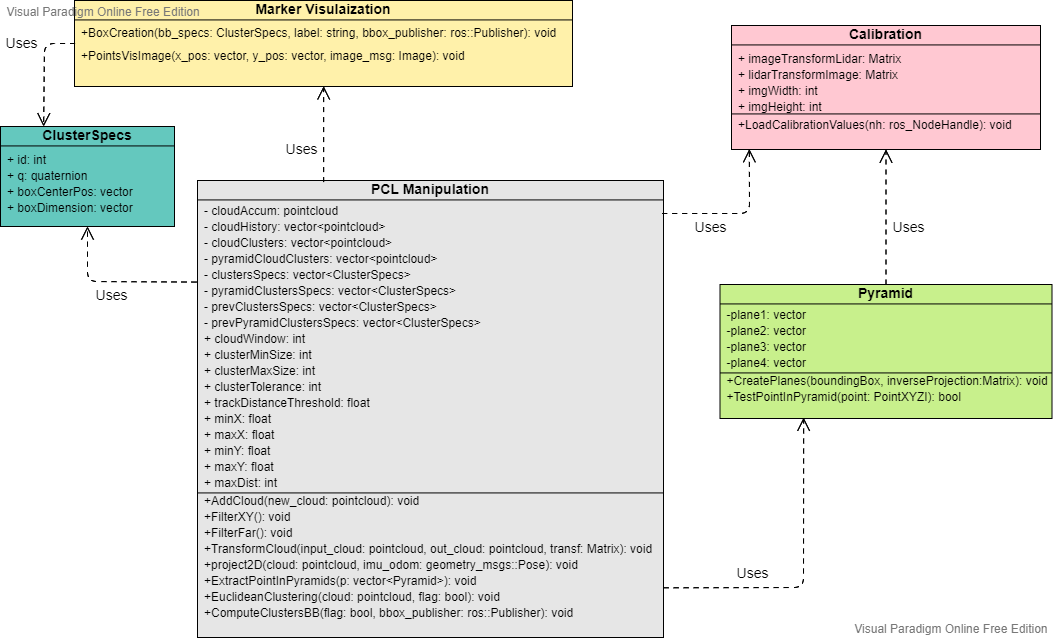
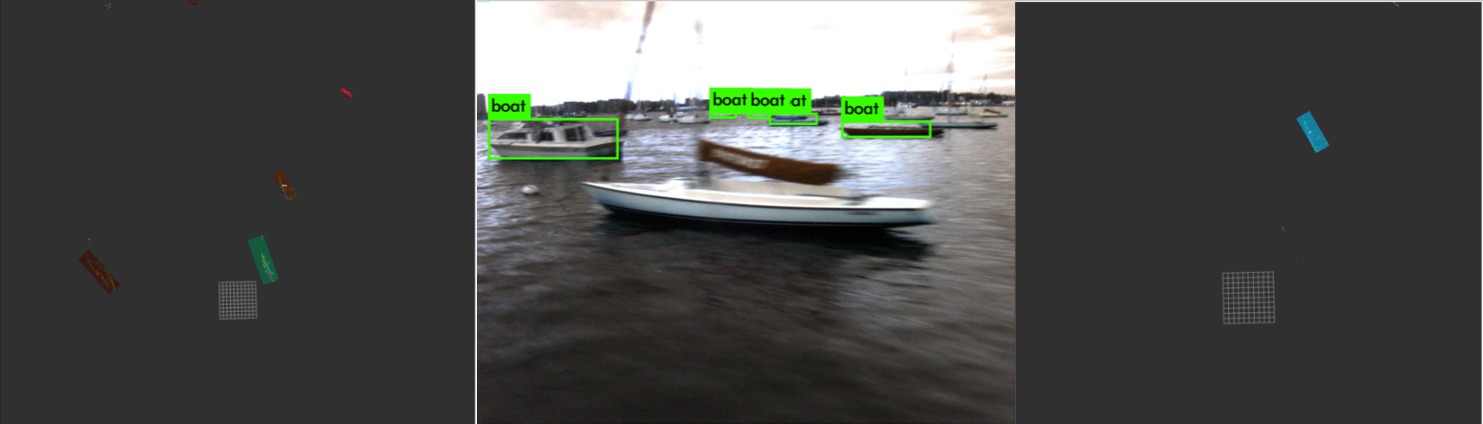
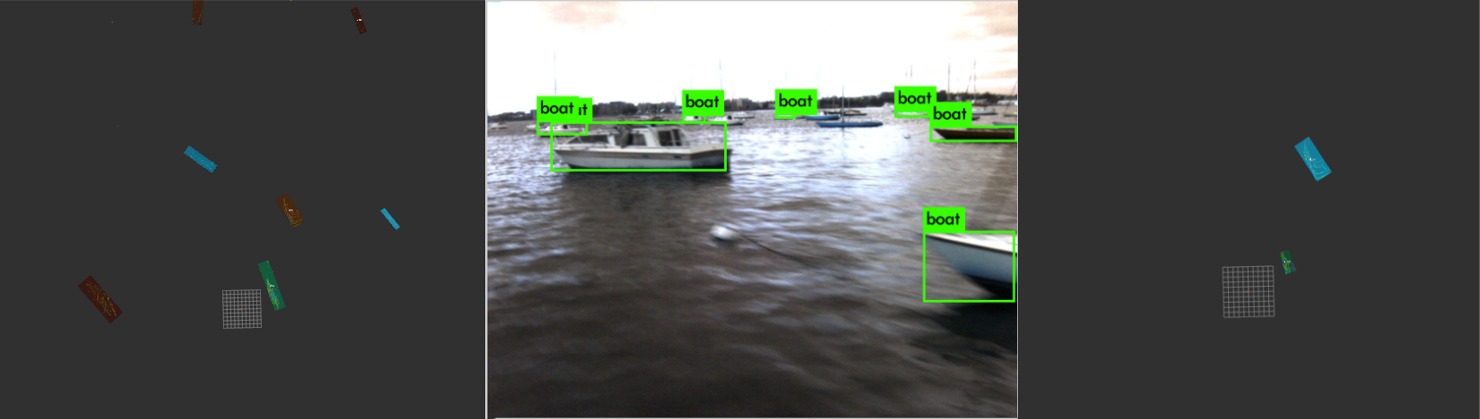
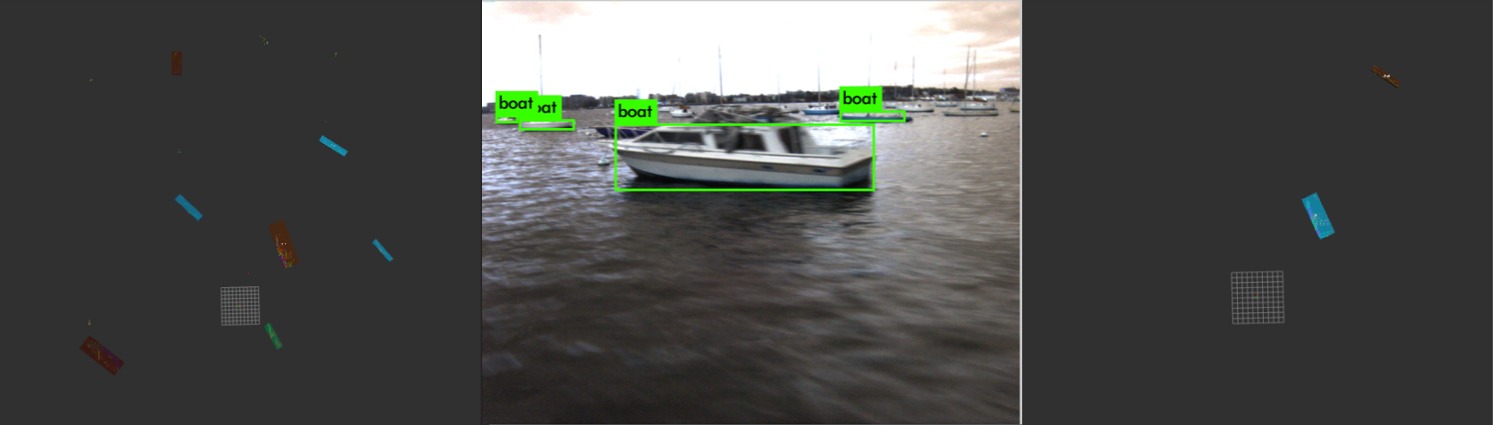
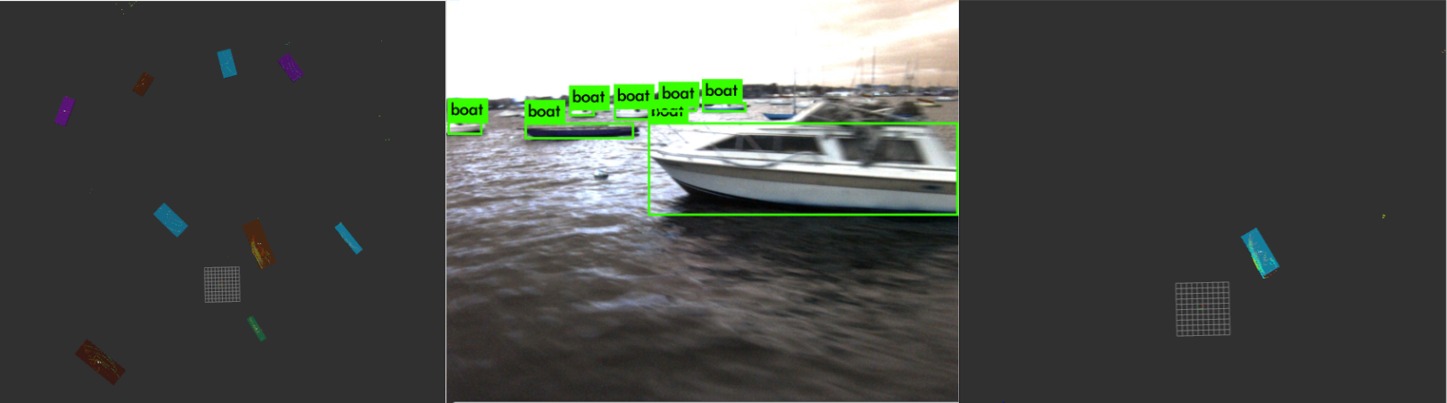
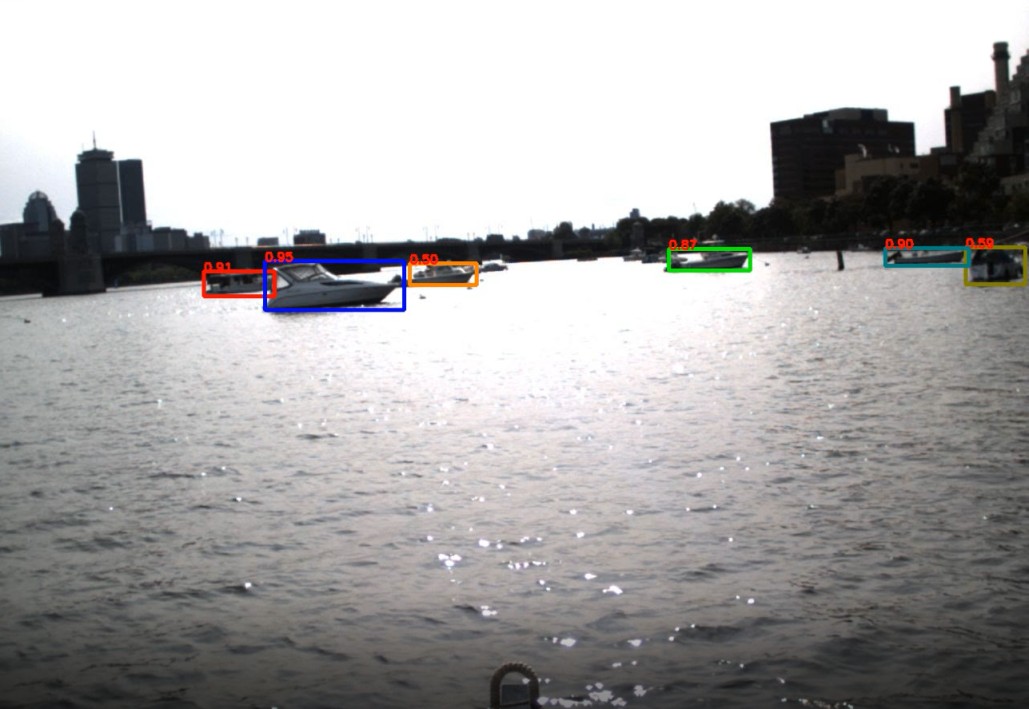
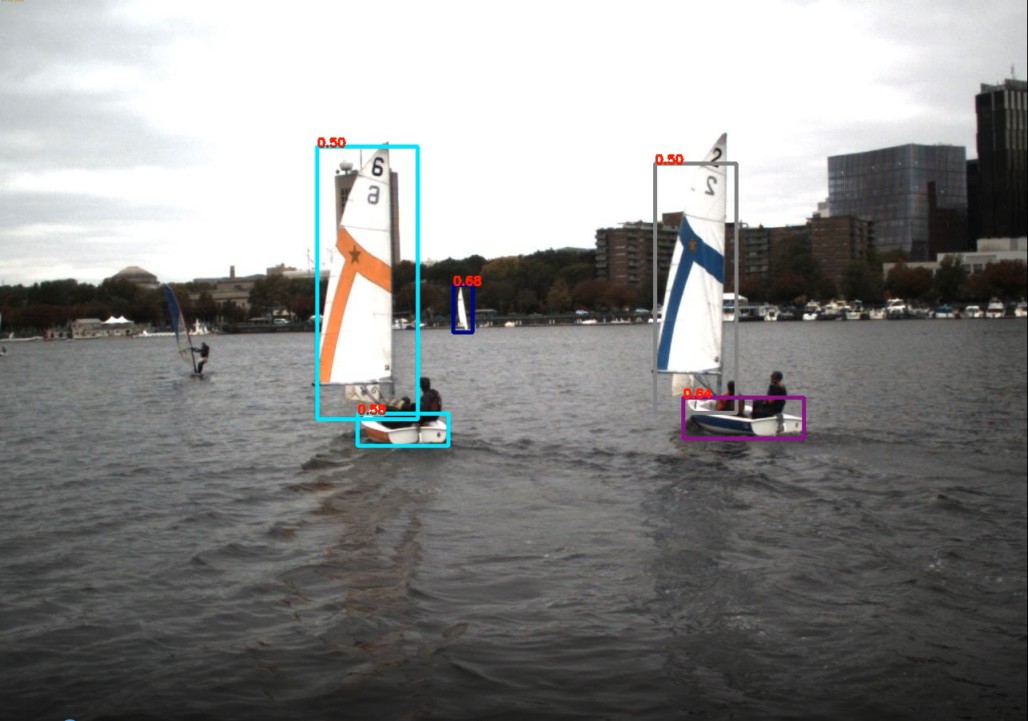
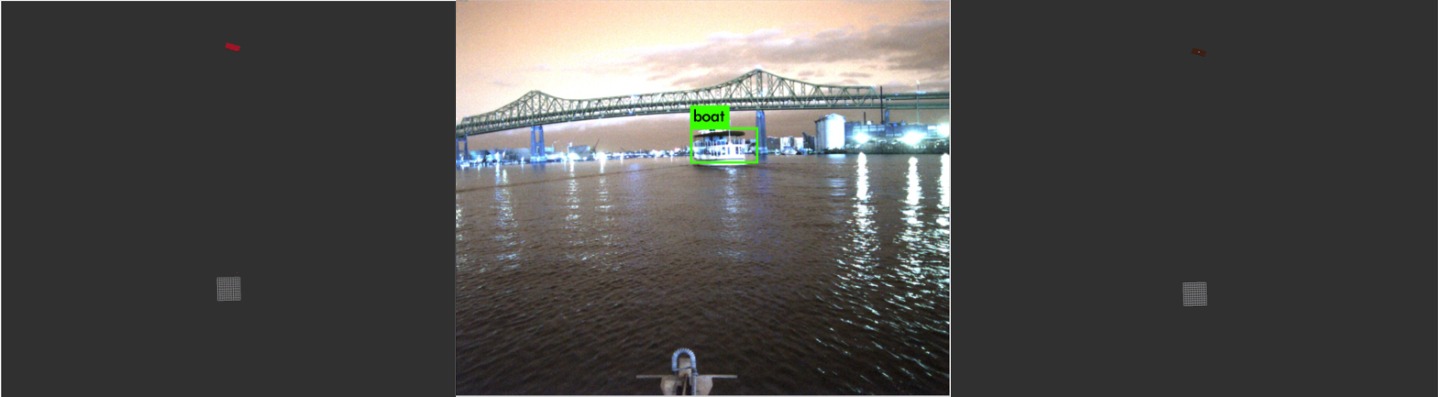
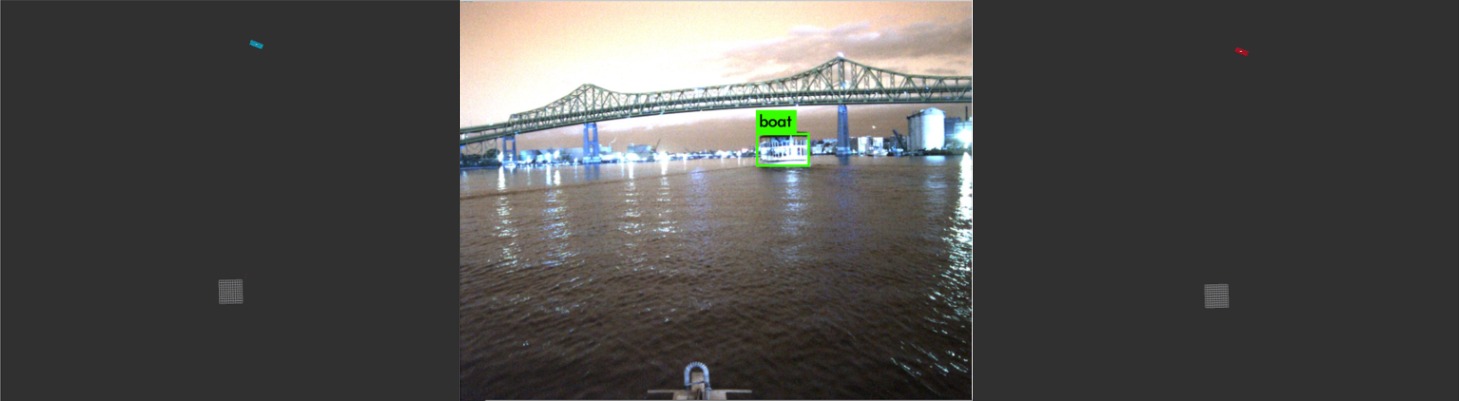
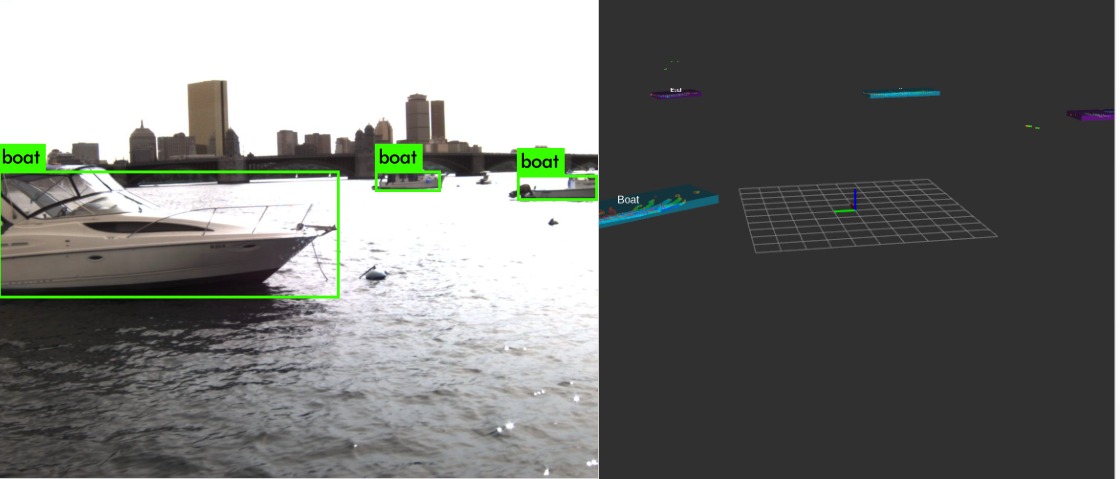
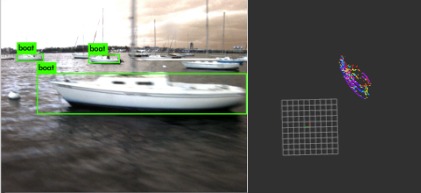
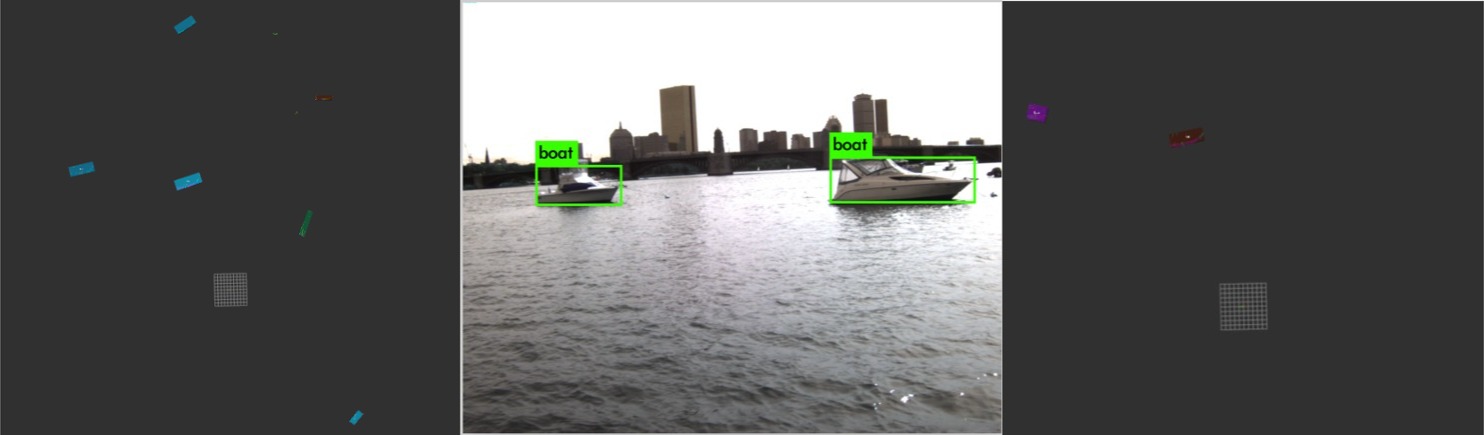
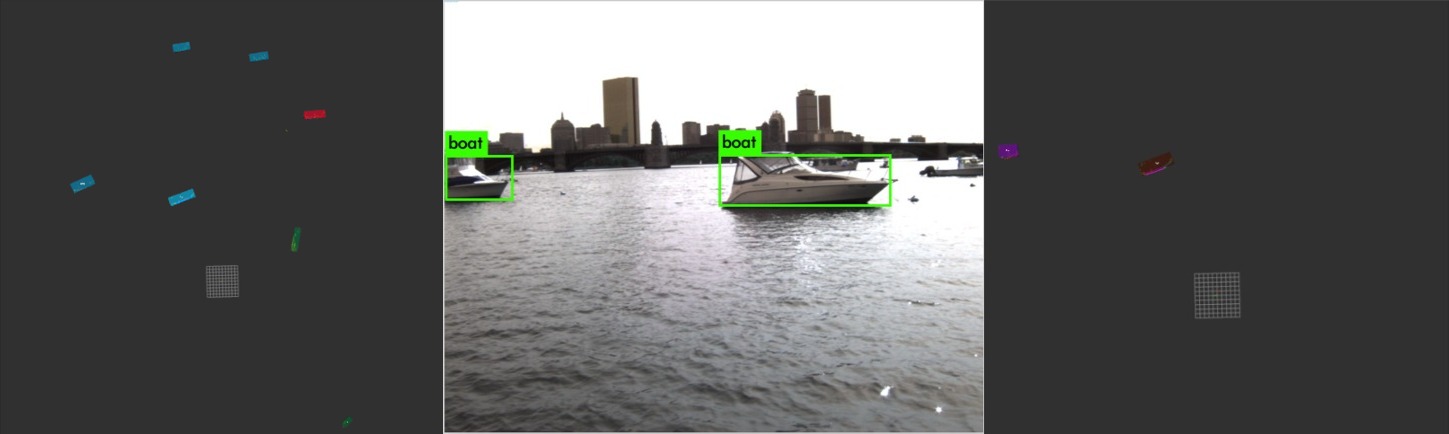
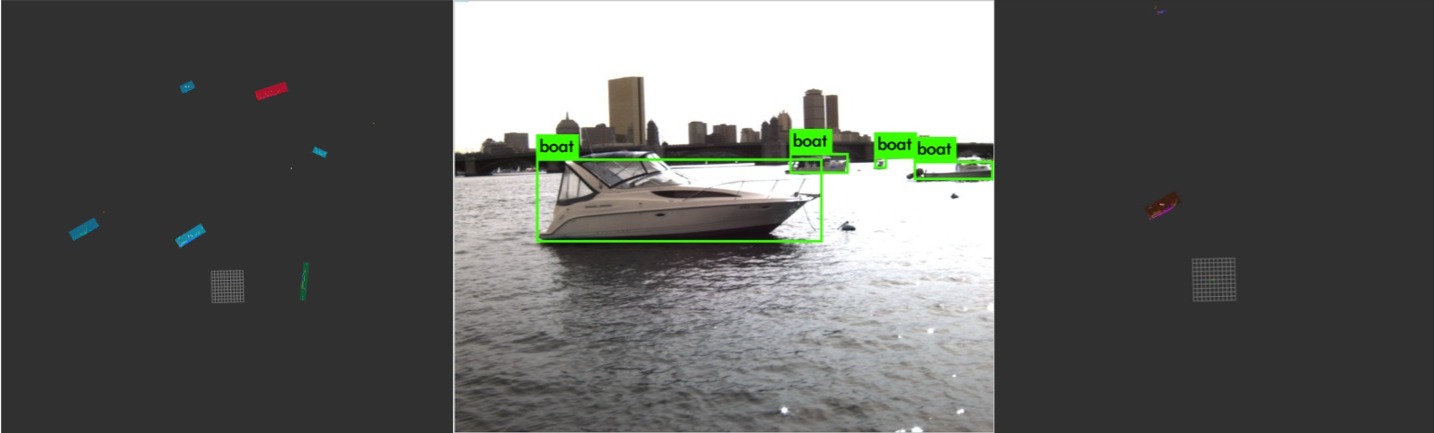
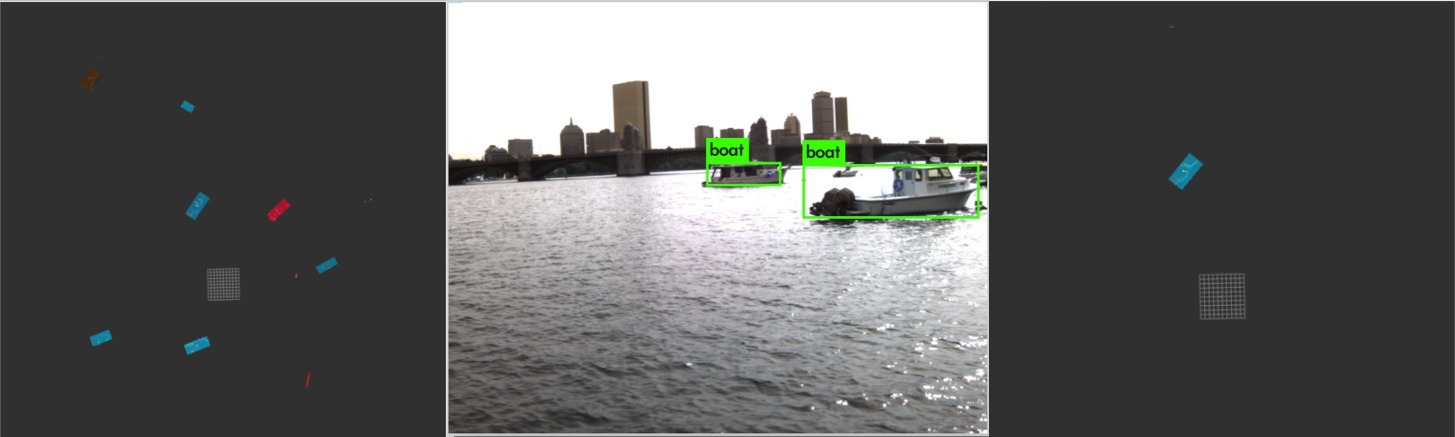
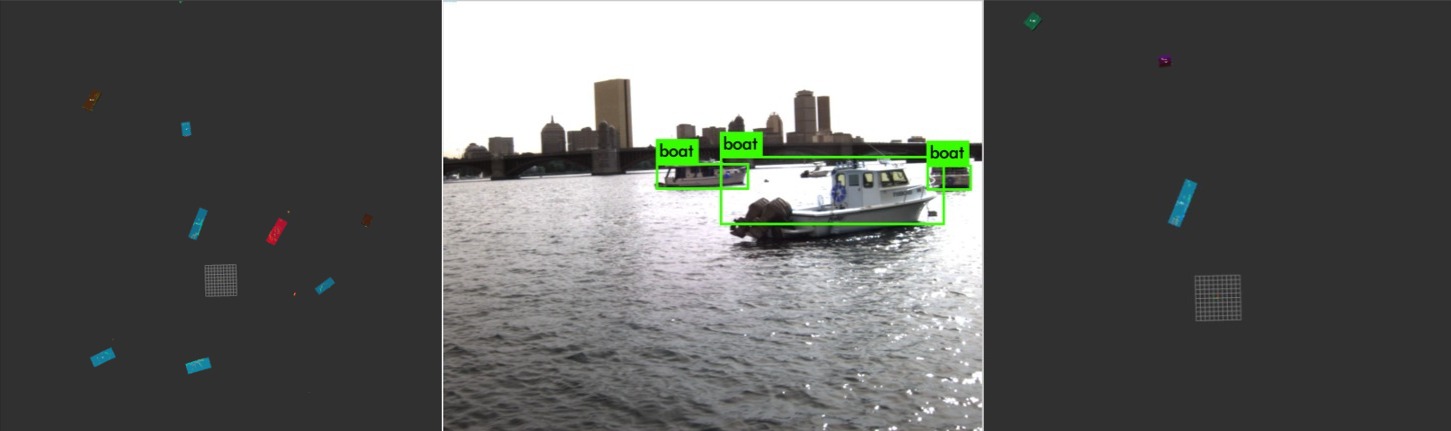
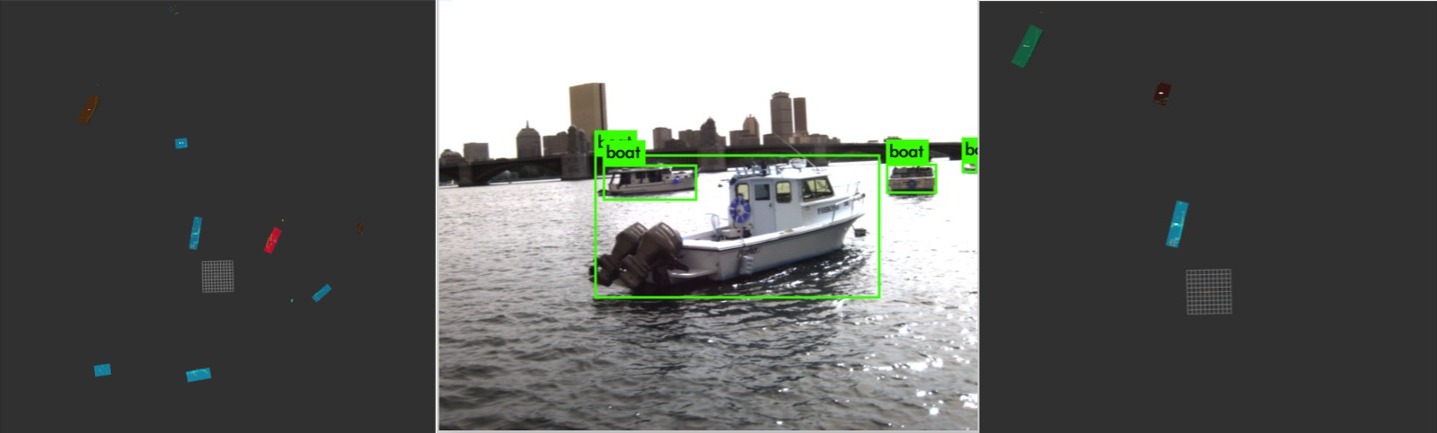
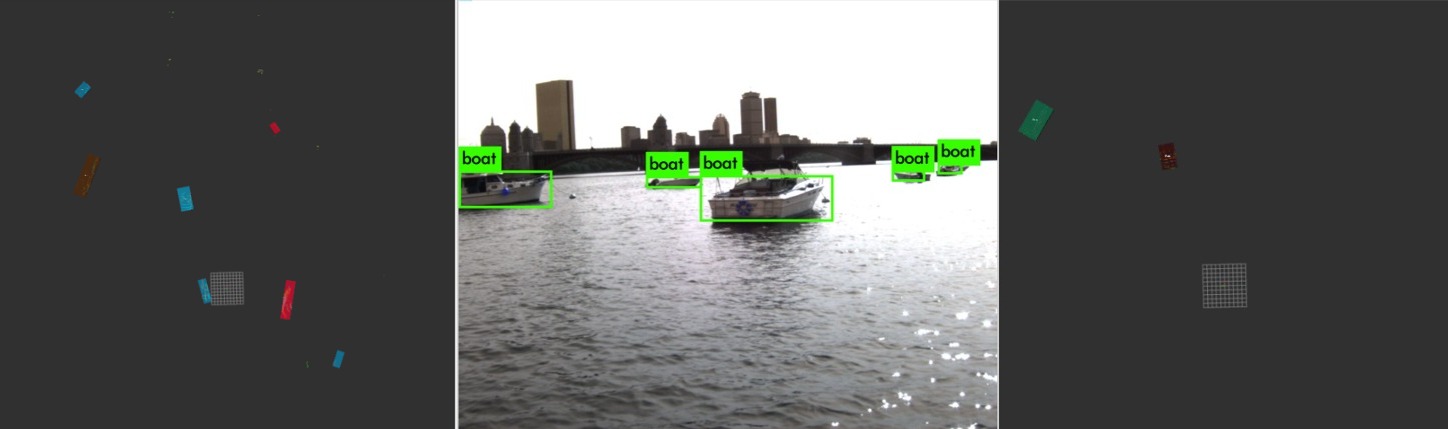
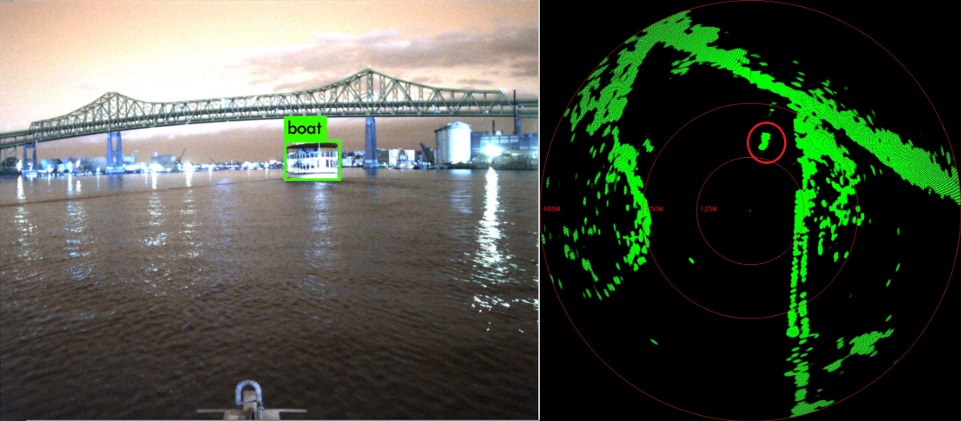
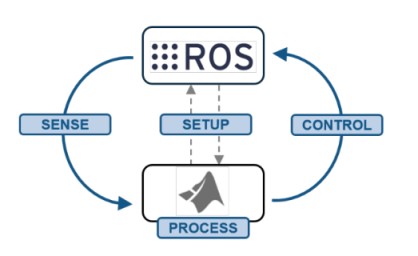
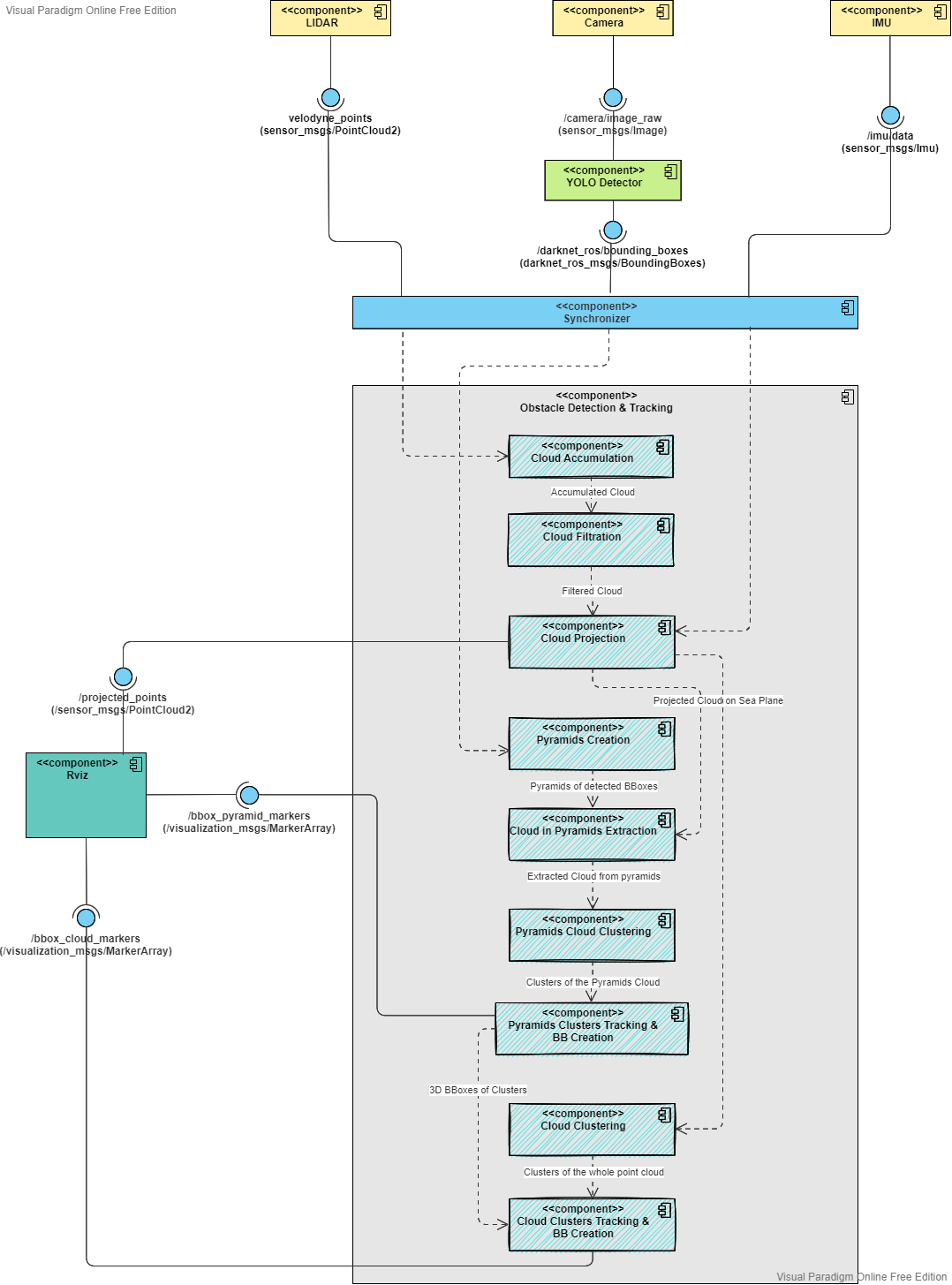
Developing a robust and effective obstacle detection and tracking system for Unmanned Surface Vehicle (USV) at marine environments is a challenging task. Research efforts have been made in this area during the past years by GRAAL lab at the university of Genova that resulted in a methodology for detecting and tracking obstacles on the image plane and, then, locating them in the 3D LiDAR point cloud. In this work, we continue on the developed system by, firstly, evaluating its performance on recently published marine datasets. Then, we integrate the different blocks of the system on ROS platform where we could test it in real-time on synchronized LiDAR and camera data collected in various marine conditions available in the MIT marine datasets. We present a thorough experimental analysis of the results obtained using two approaches; one that uses sensor fusion between the camera and LiDAR to detect and track the obstacles and the other uses only the LiDAR point cloud for the detection and tracking. In the end, we propose a hybrid approach that merges the advantages of both approaches to build an informative obstacles map of the surrounding environment to the USV.💡 Deep Analysis
📄 Full Content
📸 Image Gallery





















Reference
This content is AI-processed based on open access ArXiv data.