Addressing Corner Cases in Autonomous Driving: A World Model-based Approach with Mixture of Experts and LLMs
📝 Original Info
- Title: Addressing Corner Cases in Autonomous Driving: A World Model-based Approach with Mixture of Experts and LLMs
- ArXiv ID: 2510.21867
- Date: 2025-10-23
- Authors: Haicheng Liao, Bonan Wang, Junxian Yang, Chengyue Wang, Zhengbin He, Guohui Zhang, Chengzhong Xu, Zhenning Li
📝 Abstract
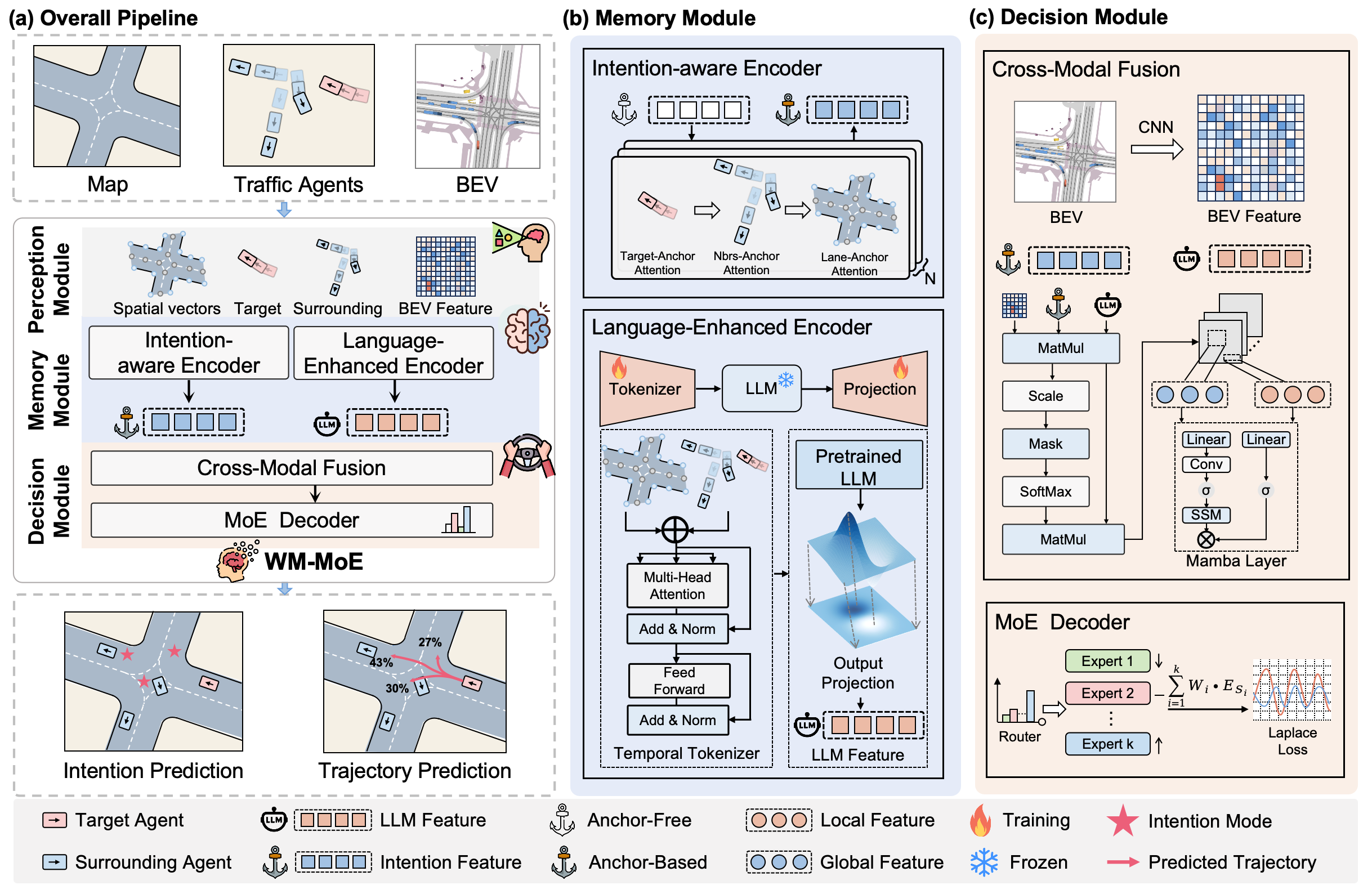
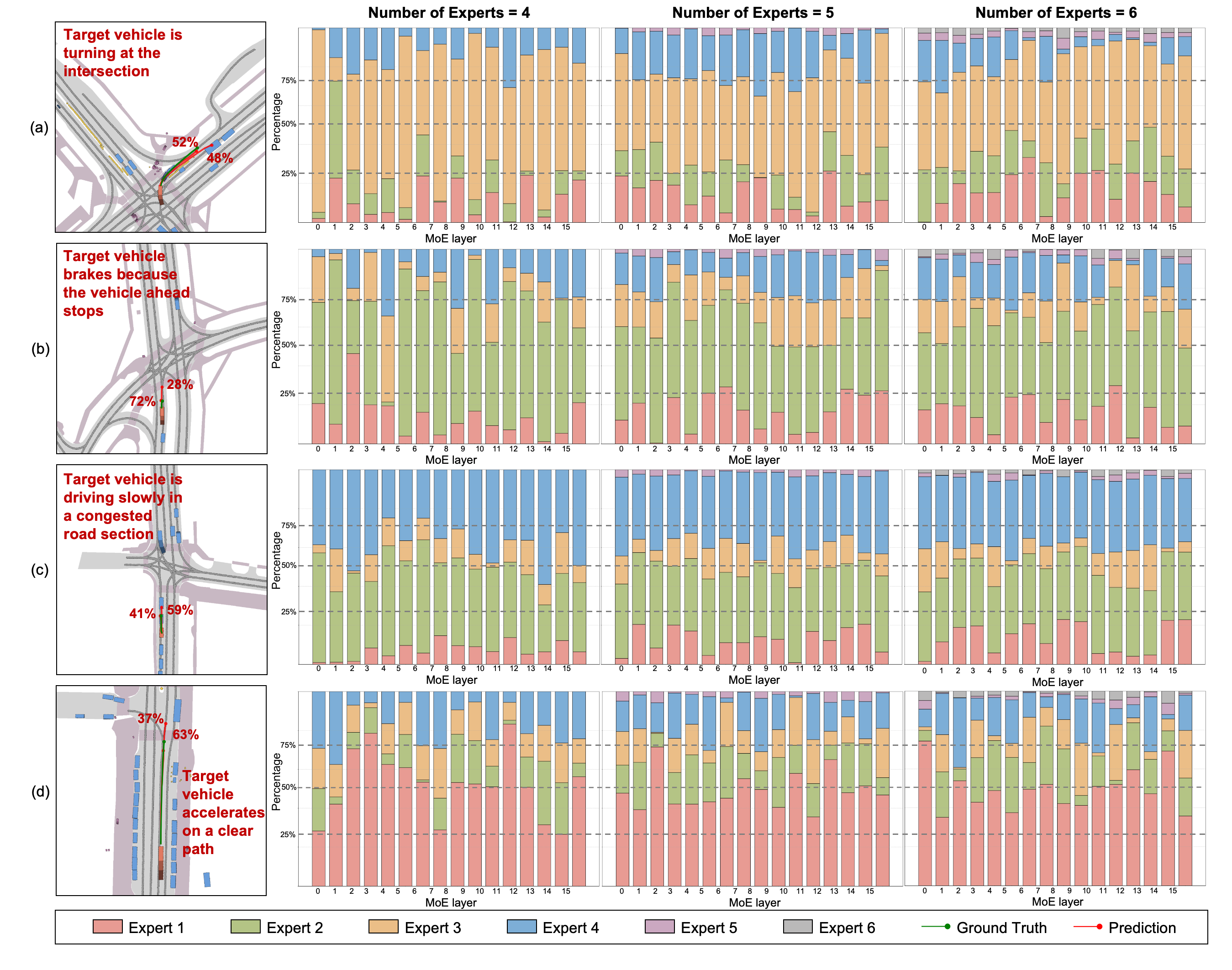
Accurate and reliable motion forecasting is essential for the safe deployment of autonomous vehicles (AVs), particularly in rare but safety-critical scenarios known as corner cases. Existing models often underperform in these situations due to an over-representation of common scenes in training data and limited generalization capabilities. To address this limitation, we present WM-MoE, the first world model-based motion forecasting framework that unifies perception, temporal memory, and decision making to address the challenges of high-risk corner-case scenarios. The model constructs a compact scene representation that explains current observations, anticipates future dynamics, and evaluates the outcomes of potential actions. To enhance long-horizon reasoning, we leverage large language models (LLMs) and introduce a lightweight temporal tokenizer that maps agent trajectories and contextual cues into the LLM's feature space without additional training, enriching temporal context and commonsense priors. Furthermore, a mixture-of-experts (MoE) is introduced to decompose complex corner cases into subproblems and allocate capacity across scenario types, and a router assigns scenes to specialized experts that infer agent intent and perform counterfactual rollouts. In addition, we introduce nuScenes-corner, a new benchmark that comprises four real-world corner-case scenarios for rigorous evaluation. Extensive experiments on four benchmark datasets (nuScenes, NGSIM, HighD, and MoCAD) showcase that WM-MoE consistently outperforms state-of-the-art (SOTA) baselines and remains robust under corner-case and data-missing conditions, indicating the promise of world model-based architectures for robust and generalizable motion forecasting in fully AVs.💡 Deep Analysis
This research explores the key findings and methodology presented in the paper: Addressing Corner Cases in Autonomous Driving: A World Model-based Approach with Mixture of Experts and LLMs.Accurate and reliable motion forecasting is essential for the safe deployment of autonomous vehicles (AVs), particularly in rare but safety-critical scenarios known as corner cases. Existing models often underperform in these situations due to an over-representation of common scenes in training data and limited generalization capabilities. To address this limitation, we present WM-MoE, the first world model-based motion forecasting framework that unifies perception, temporal memory, and decision making to address the challenges of high-risk corner-case scenarios. The model constructs a compact scene representation that explains current observations, anticipates future dynamics, and evaluates the outcomes of potential actions. To enhance long-horizon reasoning, we leverage large language models (LLMs) and introduce a lightweight temporal tokenizer that maps agent trajectories and contextual cues into the LLM’s feature space without additional training, enriching temporal context and com
📄 Full Content
📸 Image Gallery