Systems and Control
Computer Science
Mathematics
Computer Science and Game Theory
Optimization and Control
A Mixed-Logical-Dynamical Model for Autonomous Highway Driving
📝 Original Paper Info
- Title: A Mixed-Logical-Dynamical model for Automated Driving on highways- ArXiv ID: 1803.10678
- Date: 2018-03-29
- Authors: Filippo Fabiani and Sergio Grammatico
📝 Abstract
We propose a hybrid decision-making framework for safe and efficient autonomous driving of selfish vehicles on highways. Specifically, we model the dynamics of each vehicle as a Mixed-Logical-Dynamical system and propose simple driving rules to prevent potential sources of conflict among neighboring vehicles. We formalize the coordination problem as a generalized mixed-integer potential game, where an equilibrium solution generates a sequence of mixed-integer decisions for the vehicles that trade off individual optimality and overall safety.💡 Summary & Analysis
This paper introduces a hybrid decision-making framework for ensuring safe and efficient autonomous driving on highways. It models the dynamics of each vehicle as a Mixed-Logical-Dynamical system, enabling the representation of both dynamic behaviors and logical conditions in complex driving scenarios. The authors propose simple driving rules to prevent potential conflicts between neighboring vehicles.The key contribution is formalizing the coordination problem as a generalized mixed-integer potential game. This approach allows for finding an equilibrium solution where each vehicle makes decisions that balance individual optimization with overall safety, ensuring a smooth and safe flow of traffic on highways.
This research provides a promising new framework for autonomous driving systems, particularly in complex highway environments where avoiding collisions is critical.
📄 Full Paper Content (ArXiv Source)
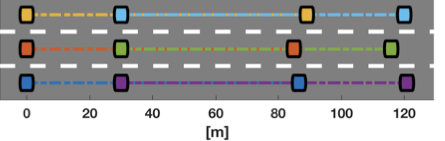
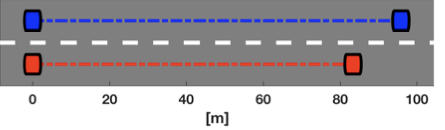
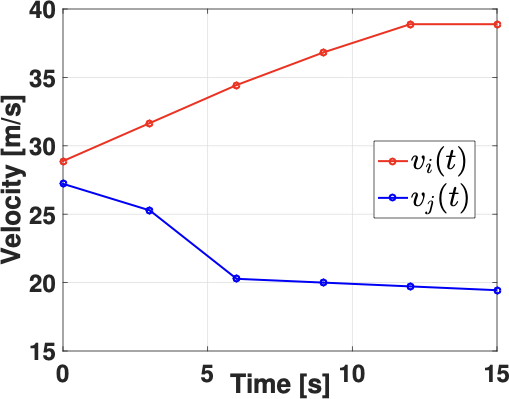
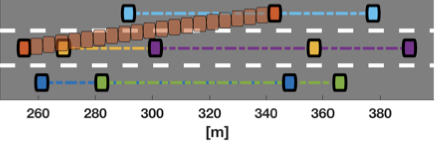
📊 논문 시각자료 (Figures)