조건부 확산 기반 포인트 클라우드 이미지로 UAV 위치·자세 인식
본 논문은 기지국 안테나 배열이 전송한 전파의 반사 에코를 이용해 무인항공기(UAV)를 3차원 전자기 포인트 클라우드로 복원하고, 위치·자세·형상을 동시에 추정하는 새로운 생성 모델을 제안한다. 위치와 신호대잡음비(SNR)를 임베딩하여 채널 노이즈와 변동성을 보정하고, 조건부 확산 모델을 통해 고품질 포인트 클라우드를 생성한다. 시뮬레이션 결과, 제안 방식이 기존 방법보다 높은 재구성 정확도와 자세·형상 추정 성능을 보인다.
저자: Xinhong Dai, Yuan Gao, Hao Jiang
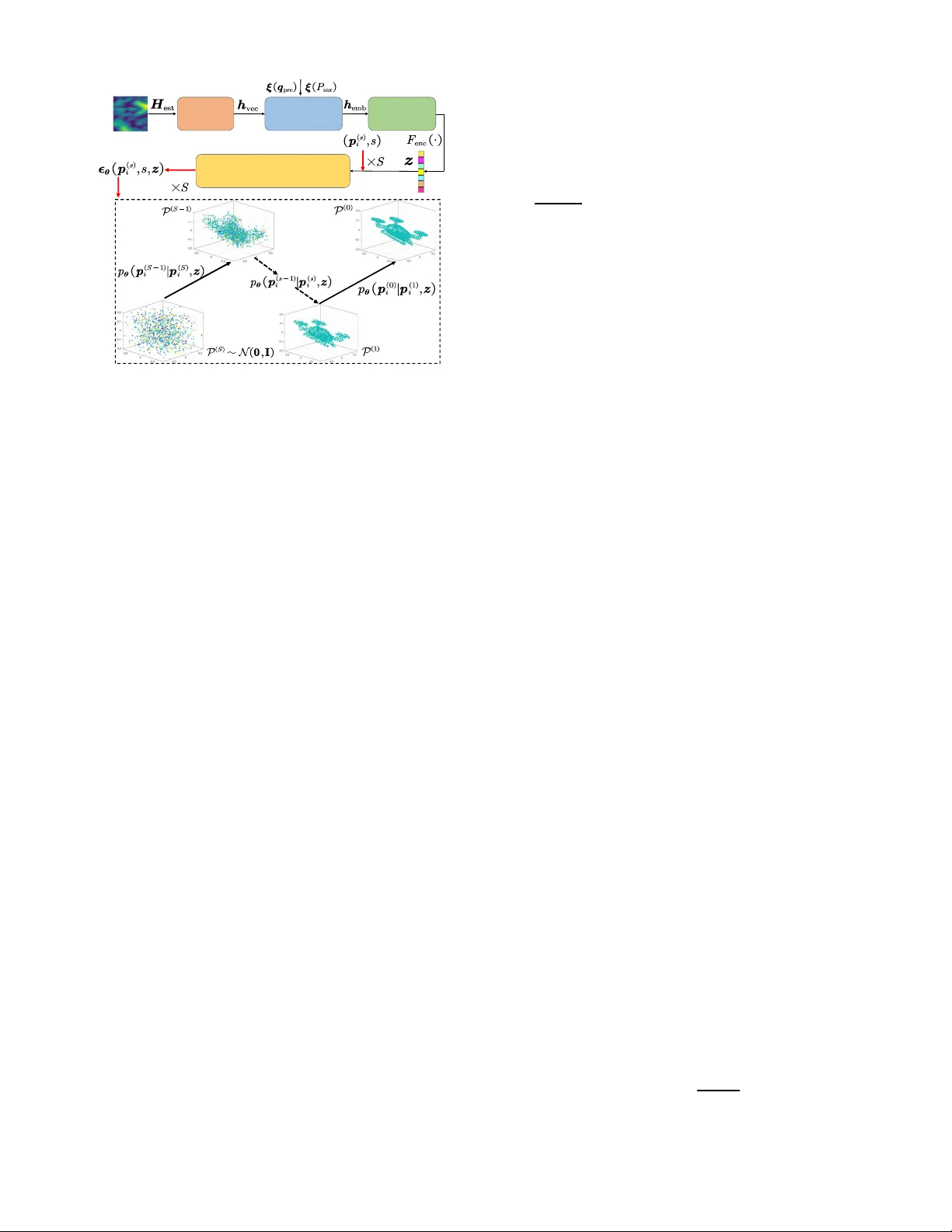
본 논문은 무인항공기(UAV)의 위치와 자세를 동시에 추정하기 위한 무선 이미지 기반 프레임워크를 제안한다. 시스템은 기지국(Base Station, BS)에 설치된 N_x × N_z 배열 안테나가 UAV가 비행할 잠재 영역에 전파를 송신하고, 반사된 에코 신호를 수신함으로써 전자기(EM) 이미지 획득을 목표로 한다. UAV는 전자기적 대비(contrast) \( \chi(p) \)와 공간 좌표를 포함하는 5차원 포인트 클라우드(3D 좌표 + 2D 전자기 파라미터)로 모델링된다.
**1. 시스템 및 전파 모델**
BS는 전송 심볼 \( x(l)=Ws(l) \)를 전송하고, 전파는 전자기 산란 모델(Lippmann‑Schwinger 방정식)을 통해 UAV 표면에서 반사된다. 수신 신호는 \( Y = HX + N \) 형태이며, 여기서 \( H \)는 UAV와 BS 사이의 복합 채널 행렬이다. 전자기 파라미터(유전율 \( \varepsilon \), 전도도 \( \sigma \))는 대비 함수 \( \chi(p) \)에 의해 정의되며, 이는 전파의 위상·진폭 변조에 직접적인 영향을 미친다.
**2. 문제 정의**
UAV의 정확한 위치·자세·형상 복원을 위해 포인트 클라우드 \( P = \{p_i\}_{i=1}^M \)를 추정한다. 이는 조건부 확률 \( p(P| \hat{H}) \)의 최대화 문제로 표현되며, 직접적인 해석은 채널‑포인트 매핑이 복잡하고 비선형이기 때문에 어려움이 있다.
**3. 제안 방법 개요**
문제 해결을 위해 (i) 채널 임베딩, (ii) 잠재 특징 추출, (iii) 조건부 확산 기반 포인트 클라우드 생성의 3단계 파이프라인을 설계한다.
- **채널 임베딩**: 추정된 채널 \( \hat{H} \)를 전결합 Fully Connected 레이어로 고차원 벡터 \( h_{vec} \)로 변환한다. UAV의 대략적인 비행 영역 중심 \( q_{pre} \)와 측정된 SNR을 각각 고차원 푸리에 임베딩 \( \xi(q_{pre}) \), \( \xi(P_{snr}) \) 로 매핑한다. 위치와 SNR 임베딩은 사인·코사인 기반 다중 주파수 성분을 포함해 고주파 변동을 선형 결합 형태로 변환한다. 이후, 위치 임베딩은 채널 벡터와 원소별 곱(멀티플리케이티브) 방식으로 결합해 \( h_{emb} =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기