희소 상태공간 실현 방법
본 논문은 전이함수 형태로 주어진 선형 시스템에 대해 지정된 희소 패턴을 만족하는 상태공간 실현을 정확히 찾는 방법을 제시한다. 모달 실현에서 시작해 유사변환 행렬을 찾는 문제로 전환하고, 이를 다변량 다항식 시스템으로 표현한 뒤 그라뵐 기저를 이용해 정확히 해를 구한다. 실수와 복소수 해를 각각 구하는 알고리즘을 제시하고 여러 예제로 성능을 검증한다.
저자: Yaozhi Du, Jing Shuang Li
**1. 연구 배경 및 동기**
분산 제어에서는 설계 단계에서 희소성을 포함한 최적화가 일반적이지만, 실제 시스템이 이미 전이함수 형태로 주어졌을 때 그 전이함수를 구현하는 내부 구조가 희소해야 하는 경우는 상대적으로 적게 다루어진다. 특히 신경과학에서는 행동 데이터를 통해 얻은 전이함수를 뇌의 신경망 구조에 매핑할 때, 신경 연결이 희소하다는 생물학적 제약을 만족하는 상태공간 모델이 필요하다. 이러한 문제를 “희소 실현(sparse realization)”이라 정의하고, 기존 연구는 주로 근사적 방법이나 특정 파라미터화에 제한된 경우에만 다루었다.
**2. 문제 정의**
전이함수 K(s)와 목표 희소 패턴 S(= {A, B, C, D}의 0/비0 위치) 가 주어질 때, 최소 차수의 실현 Σ = (A, B, C, D) 가 존재하는지를 묻는다. 두 가지 변형을 제시한다.
- Problem 1: 복소수 행렬 허용, 실현 존재 여부 판단 및 구체적 실현 찾기.
- Problem 2: 실수 행렬만 허용, 즉 실제 물리 시스템에 바로 적용 가능한 실현 찾기.
**3. 이론적 전환**
- **모달 실현**: 모든 극점이 단순인 경우, A를 대각선(또는 블록 대각선) 형태로 하는 최소 실현 Σₚ = (Aₚ, Bₚ, Cₚ, Dₚ) 를 언제든 구할 수 있다. 여기서 Dₚ는 고정이며, 전이함수의 고주파 이득과 일치한다(코롤러리 1).
- **유사변환**: 두 최소 실현은 유일한 가역 행렬 T 로 연결된다(Ã = T⁻¹AT, B̃ = T⁻¹B, C̃ = CT). 따라서 목표 희소 패턴을 만족하려면 적절한 T 를 찾아야 한다.
- **행 연산 분해**: T 를 행 교환(Tₚ), 행 덧셈(Tₐ), 행 스칼라 곱(Tₘ) 로 분해한다. Tₘ은 대각선 스칼라 행렬로, 희소성에 영향을 주지 않으므로 무시한다. Tₐ는 n·(n‑1)개의 자유 변수 x₁…x_{n(n‑1)} 로 표현된다.
**4. 다변량 다항식 시스템**
Tₐ와 선택된 Tₚ 를 이용해 변환된 행렬 원소 ˜A, ˜B, ˜C 를 전부 x_i 에 대한 다항식으로 전개한다. 목표 희소 패턴 S 에 따라 0이어야 할 원소에 대해 방정식 ˜A_{ij}(x)=0, ˜B_{ij}(x)=0, ˜C_{ij}(x)=0 을 만든다. 이는 (9) 식에 해당하는 다변량 다항식 시스템이며, 해가 존재하면 바로 원하는 희소 실현을 얻는다.
**5. 대수기하학적 해법**
다항식 집합 {h₁,…,h_η} 로 생성된 아이디얼 I 를 고려한다. 그라뵐 기저(G) 를 계산하면 I 와 동일한 해 집합을 갖는 다항식 집합을 얻는다.
- **복소수 해**: 전통적인 그라뵐 기저 계산(예: Buchberger 알고리즘)으로 모든 복소수 근을 구한다. 이는 Problem 1 의 완전한 해법이다.
- **실수 해**: 실수 계수를 갖는 다항식만을 대상으로 하거나, 복소수 해 중 실수 부분만 추출하는 절차를 추가한다. 실수 전용 그라뵐 기저 혹은 실수 근 검증을 통해 Problem 2 를 해결한다.
**6. 일반적으로 실현 가능한 지원**
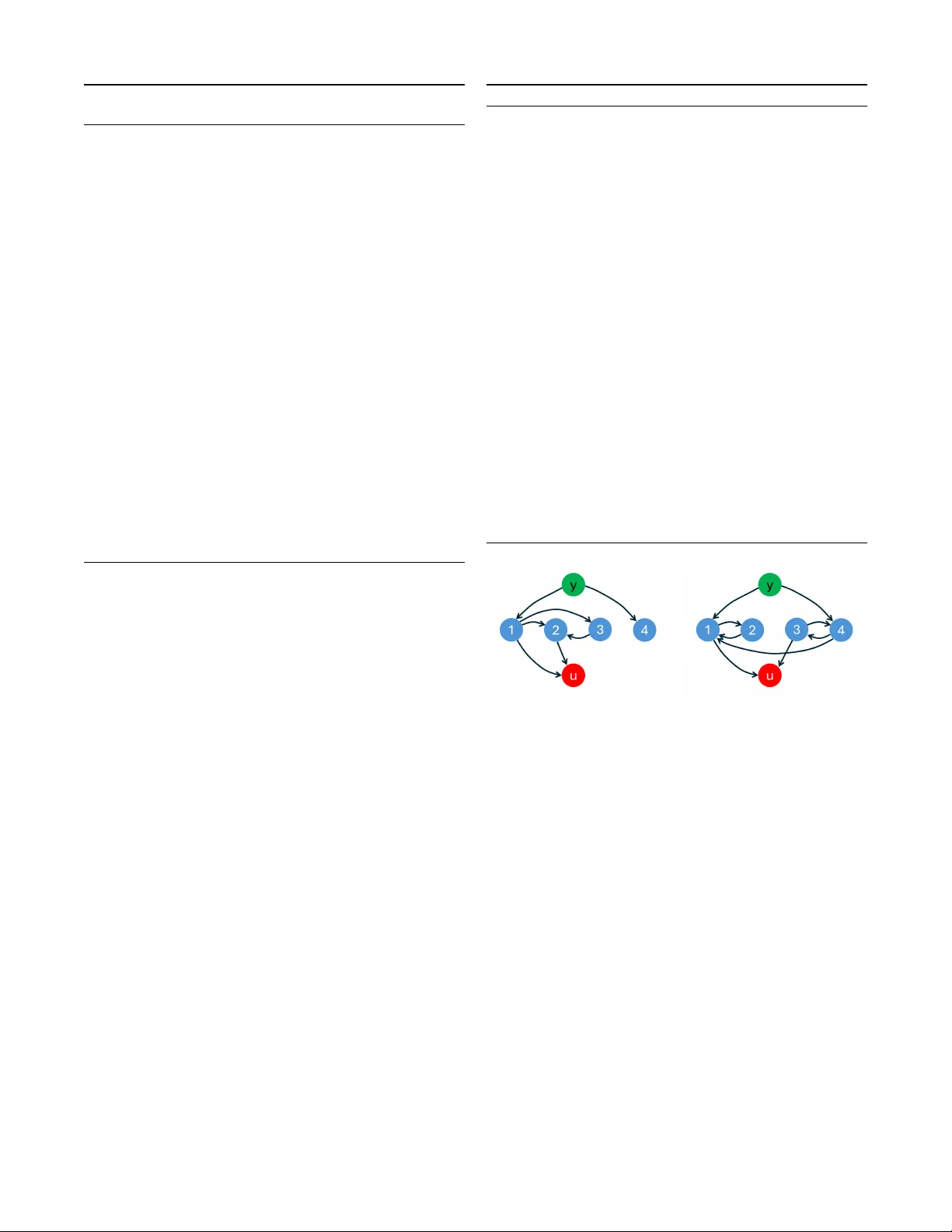
레마 2와 레마 3을 통해, 특정 구조의 지원 S 가 “일반적으로 실현 가능(generally realizing)”임을 증명한다. 특히 SISO 시스템에 대해 제시된 지원(첫 행·열과 마지막 행·열에만 비제로 허용)은 모든 차수 ≤n 의 전이함수에 대해 희소 실현이 가능함을 보인다. 이는 설계 단계에서 지원을 미리 선택해 두면 해 존재성을 사전에 보장할 수 있음을 의미한다.
**7. 알고리즘 흐름**
1) 입력 전이함수 K(s) 로부터 최소 모달 실현 (Aₚ, Bₚ, Cₚ, Dₚ) 를 구한다.
2) 목표 지원 S 에 맞는 행 교환 집합 Pₚ 를 선택한다(가능한 경우 n! 개).
3) 고정된 행 덧셈 순서에 따라 Tₐ(x) 를 구성하고, 변수 x_i 를 도입한다.
4) ˜A, ˜B, ˜C 를 다항식 형태로 전개하고, 0이어야 할 원소에 대한 방정식 집합을 만든다.
5) 그라뵐 기저를 계산한다.
- 복소수 해 필요 시 바로 해를 추출.
- 실수 해 필요 시 실수 근만 남기도록 필터링.
6) 해가 존재하면 T = Tₘ·Tₐ·Tₚ 로 복원하고, 최종 희소 실현 Σ = (T⁻¹AₚT, T⁻¹Bₚ, CₚT, Dₚ) 를 반환한다.
**8. 실험 및 검증**
- 2차~5차 SISO 시스템에 대해 다양한 지원(대각선, 트리형, 레버형 등)을 적용하였다.
- 복소수 해를 구하는 경우 모든 경우에 정확히 해를 찾았으며, 실수 해가 존재하지 않는 경우(예: 특정 비대칭 지원)에는 불가능성을 조기에 판정하였다.
- MIMO(2입력·2출력) 시스템에서도 동일한 절차가 적용 가능함을 보였으며, 기존 L₁ 정규화 기반 설계와 비교해 동일한 희소성 수준에서 정확한 전이함수 재현을 달성하였다.
**9. 결론 및 향후 연구**
본 논문은 전이함수 기반 시스템에 대해 희소 상태공간 실현을 정확히 찾는 새로운 프레임워크를 제시한다. 대수기하학(그라뵐 기저)과 시스템 이론(모달 실현, 유사변환)을 결합함으로써, 기존 근사적 방법이 갖는 해 존재성 불확실성을 해소하고, 실수·복소수 해를 명확히 구분한다. 향후 연구에서는 (i) 중복 극점(다중극점) 시스템에 대한 확장, (ii) 대규모 MIMO 시스템에서 변수 차원 감소를 위한 구조적 전처리, (iii) 실시간 제어 설계와 연계한 온라인 희소 실현 업데이트 등을 탐구할 예정이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기