에너지 공유 UAV UGV 시스템을 위한 비선형 궤적 최적화 모델
본 논문은 이동식 충전소 역할을 하는 지상 차량(UGV)과 협업하는 무인 항공기(UAV)의 지속 비행을 위해, 지형 접근 제한과 부분 충전 가능성을 부드러운 비선형 프로그램으로 모델링한다. 이산형 논리 제약을 ℓp‑노름 기반의 부드러운 근사로 변환해 정수 변수 없이 해결 가능하도록 하였으며, 실험 결과 기존 MILP 기반 방법에 비해 계산 시간을 수십 배 이상 단축하였다.
저자: Minsen Yuan, Amanuel Adane, James Humann
본 논문은 에너지 공유 UAV‑UGV 시스템의 궤적 최적화를 다루며, 특히 지형 접근 제약과 이산적인 작업 스케줄링이 결합된 복합 문제에 초점을 맞춘다. 기존 연구들은 UGV의 도로망을 그래프 형태로 이산화하고, UAV 배터리를 완전 충전 전제로 모델링하거나, MILP·MINLP와 같은 정수 기반 최적화 기법에 의존해 계산 복잡도가 급증하는 한계를 가지고 있었다. 이를 극복하기 위해 저자들은 세 가지 핵심 설계를 제안한다.
첫 번째는 UGV의 도로망을 별형 그래프(중심 정점에서 여러 팔이 뻗어 있는 형태)로 가정하고, 각 팔을 연속적인 거리 변수 p_k ∈ ℝ^{m_G} 로 파라미터화한다. 비선형 매핑 g(p_k) 를 통해 실제 2차원 위치 r_Gk와 연결함으로써, 노드·에지 이산화 없이도 UGV가 어느 팔을, 어느 거리까지 이동했는지를 정확히 기술한다. 이 접근법은 p_k 가 한 시점에 하나의 양수 원소만 가질 수 있다는 제약(p_k^T 1 ≤ 1)으로 팔 선택을 자연스럽게 제한한다.
두 번째는 UAV 배터리 동역학을 두 모드(충전·방전)로 구분하고, 충전 시에는 e_{k+1} ≤ min(e_k + κ s_k, e_max) 형태의 부드러운 불평등을 적용한다. 완전 충전 강제 대신 상한 e_max 를 유지하면서도, 실제 충전 효율을 과도하게 제한하지 않도록 완화된 제약(e_{k+1} ≤ e_k + κ s_k) 을 도입한다. 이는 수치 해석 시 발생하는 비선형 최소 연산의 경계값 문제를 완화하고, 솔버가 더 넓은 feasible set을 탐색하도록 돕는다.
세 번째이자 가장 혁신적인 부분은 논리적 OR 제약(작업 방문, 충전·방전 전환, UGV 팔 도달 등)을 ℓp‑노름 기반의 부드러운 근사식으로 변환한 것이다. 원래는 이산 변수 U_{ki}, V_{kj}, W_k 로 표현돼야 했으나, 저자들은 각 논리식의 만족도를 ‖·‖_p (p → ∞) 로 근사해 “점별 최소”를 연속형 함수로 바꾸었다. 예를 들어, ∃ k : r_Ak = a_i 를 ‖r_Ak − a_i‖_p ≤ ε 로 바꾸고, ε 를 충분히 작게 설정한다. 이렇게 하면 정수 변수 없이도 논리적 선택을 부드러운 제약으로 대체할 수 있다.
전체 최적화 문제는 총 미션 시간 Σ s_k 를 최소화하는 목적함수와, (1) UAV·UGV 위치·속도 제약, (2) 배터리 한계·충전·방전 제약, (3) 부드러운 ℓp‑근사 논리 제약으로 구성된다. 모든 제약이 연속적이고 미분 가능하도록 설계돼 있기 때문에, 내부점법, 증강 라그랑주, 혹은 SQP와 같은 표준 비선형 프로그래밍 솔버로 직접 해결 가능하다.
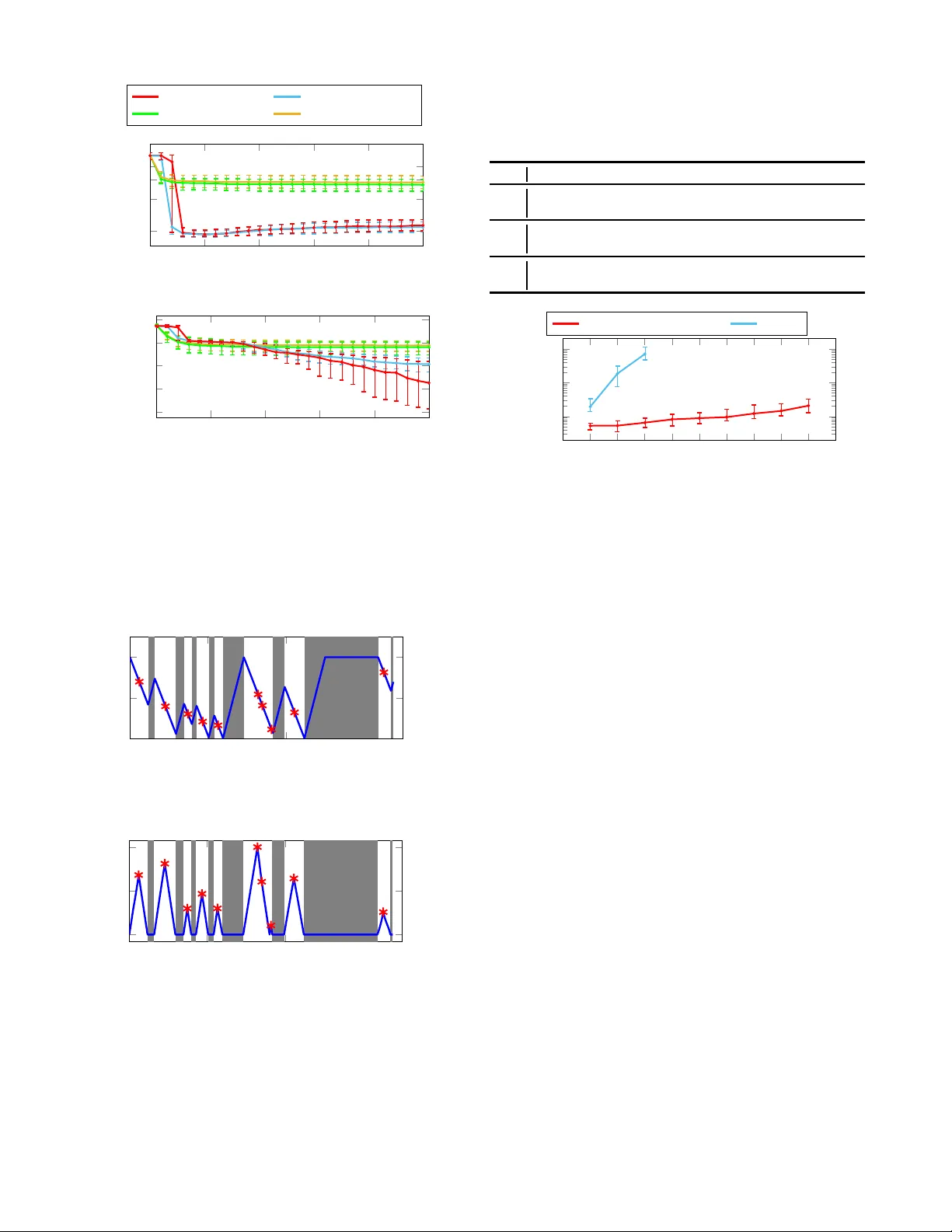
실험 설정은 하나의 UAV와 하나의 UGV가 다수(m_A = 10)의 UAV 작업 지점과 m_G = 3개의 UGV 팔 끝점에 도달해야 하는 시나리오다. 제안 모델은 동일한 문제를 MILP 기반 MINLP로 풀었을 때와 비교했으며, 계산 시간은 수시간(≈ 3 h)에서 수분(≈ 5 min) 수준으로 감소했다. 최적화된 궤적은 UAV가 충전 필요 시 UGV와 정확히 정렬해 착륙·충전하고, 부분 충전을 통해 불필요한 대기 시간을 최소화한다. 성공률(모든 작업·충전 제약 만족)은 98% 이상으로, 정수 변수 제거가 해의 품질에 부정적 영향을 주지 않음을 확인했다.
결론적으로, 이 논문은 (1) 연속형 경로 파라미터화로 도로망 이산화 문제 해결, (2) 부분 충전을 허용하는 배터리 동역학 모델링, (3) ℓp‑노름 기반 부드러운 논리 제약 근사라는 세 가지 혁신을 통해 UAV‑UGV 협동 시스템의 궤적 최적화를 실시간에 가까운 수준으로 끌어올렸다. 향후 연구에서는 다중 UAV·다중 UGV, 비정형 도로망, 그리고 배터리 소모의 확률적 모델을 포함한 확장이 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기