도심 속 드론과 자동차를 하나의 시뮬레이터로
CARLA‑Air는 Unreal Engine 기반의 오픈소스 플랫폼으로, CARLA의 고품질 도시 주행 환경과 AirSim의 물리‑정확한 멀티로터 비행을 단일 프로세스 내에서 결합한다. 양쪽의 네이티브 Python API와 ROS 2 인터페이스를 그대로 유지해 기존 코드를 수정 없이 사용할 수 있으며, 공유 물리 틱과 렌더링 파이프라인을 통해 시공간 일관성을 보장한다. 최대 18종의 센서 데이터를 동기화해 제공하고, 사용자 정의 로봇·UAV·맵…
저자: Tianle Zeng, Hanxuan Chen, Yanci Wen
본 논문은 저고도 경제, 에임드 인텔리전스, 공중‑지상 협업 시스템이라는 세 가지 급성장 분야를 지원하기 위한 통합 시뮬레이션 인프라의 부재를 지적한다. 기존 오픈소스 시뮬레이터는 각각 도로·교통(예: CARLA, LGSVL, SUMO) 혹은 비행(예: AirSim, Flightmare, Gazebo) 영역에 특화돼 있어, 두 영역을 동시에 모델링하기 어렵다. 브리지 기반 코‑시뮬레이션은 기능적으로 가능하지만, 프로세스 간 동기화 복잡성, 통신 오버헤드, 그리고 가장 중요한 시공간 일관성 보장 실패라는 한계를 가진다.
이에 저자들은 CARLA‑Air라는 새로운 플랫폼을 제안한다. 핵심 설계는 하나의 Unreal Engine 4 프로세스 안에 CARLA와 AirSim을 동시에 로드하고, ‘CARLAAirGameMode’라는 게임 모드가 두 서브시스템을 조화시킨다. 지상 시뮬레이션은 CARLA의 기존 월드 관리·교통·보행자 시스템을 그대로 사용하고, AirSim의 비행 액터는 일반 UE4 액터로서 구성된다. 이렇게 하면 물리 엔진과 렌더링 파이프라인이 완전 공유되며, 모든 센서가 동일한 물리 틱에서 데이터를 수집한다.
플랫폼은 두 시뮬레이터의 네이티브 Python API와 ROS 2 인터페이스를 그대로 보존한다. 사용자는 기존 CARLA 코드나 AirSim 코드(예: 차량 제어, 드론 비행, 센서 설정)를 수정 없이 그대로 실행할 수 있다. 내부적으로는 각각 독립적인 RPC 서버가 존재해 클라이언트와 통신하지만, 이는 프로세스 경계를 넘는 것이 아니라 동일 프로세스 내에서의 네트워크 호출이므로 성능 손실이 최소화된다.
센서 지원은 매우 풍부하다. RGB, Depth, Semantic Segmentation, LiDAR, Radar, IMU, GNSS, Barometer 등 18가지 모달리티를 동시에 캡처하고, 각 센서는 공중·지상 모두에 적용 가능하다. 실험 결과(그림 2)에서 보듯, 센서 수가 증가해도 프레임당 데이터 전송 지연은 0.5 ms 이하로 유지돼, 대규모 멀티모달 데이터셋 구축이나 실시간 강화학습에 적합하다.
CARLA‑Air는 확장 가능한 에셋 파이프라인을 제공한다. 사용자 정의 UAV·차량·맵을 UE4 에디터를 통해 임포트하고, Python 스크립트로 스폰·제어·센서 부착이 가능하다. 이는 연구자들이 복잡한 공중‑지상 협업 시나리오(예: 드론이 고층 건물 위에서 실시간 영상을 제공하고, 지상 차량이 이를 기반으로 경로를 재계산하는 상황)를 손쉽게 구현하도록 돕는다.
관련 연구와의 비교에서는 기존 플랫폼이 제공하는 기능을 표 1·표 2에 정리한다. 대부분은 단일 도메인에 집중하거나, 다중 프로세스·브리지 구조로 인해 API 호환성 손실·렌더링 중복·시계열 비동기화 문제를 안고 있다. CARLA‑Air는 ‘Single Process + API Kept + Shared Render + Shared Tick’이라는 네 가지 핵심 속성을 모두 만족함으로써, 이러한 한계를 근본적으로 해결한다.
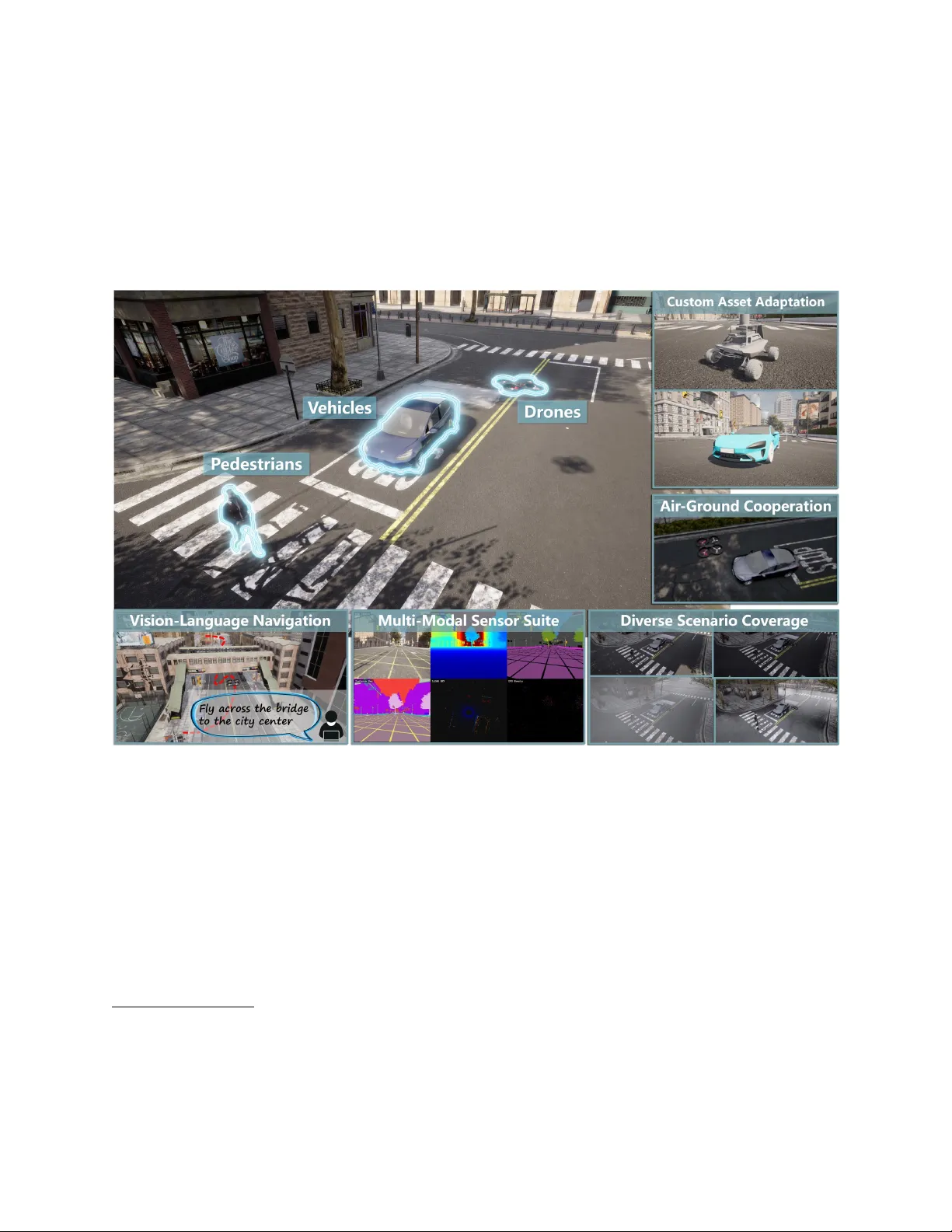
플랫폼이 지원하는 네 가지 주요 연구 방향은 다음과 같다.
1) **공중‑지상 협동**: 드론과 차량이 협력해 감시, 구조, 수색·구조 작업을 수행한다.
2) **비전‑언어 기반 내비게이션**: 드론이 제공하는 전역 시점 영상과 지상 차량이 제공하는 상세 시점 정보를 결합해, 자연어 명령에 따라 목표 지점을 탐색한다.
3) **멀티모달 데이터셋 구축**: 공중·지상 센서 스트림을 동기화해 크로스‑뷰 3D 재구성·장면 이해용 대규모 데이터셋을 자동 생성한다.
4) **강화학습 정책 학습**: 물리‑정확한 환경에서 협동 정책 또는 개별 정책을 학습·평가한다.
결론적으로 CARLA‑Air는 도시 환경의 고품질 시각·교통·보행자 모델링과 물리‑정확한 멀티로터 비행을 하나의 일관된 시뮬레이션 세계에 통합함으로써, 저고도 로보틱스와 에임드 인텔리전스 연구의 진입 장벽을 크게 낮춘다. 오픈소스 코드와 사전 컴파일 바이너리를 제공해 즉시 사용 가능하며, 활발한 커뮤니티와 지속적인 업데이트가 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기