객체 재구성을 위한 시야‑집중 전신 제어 기법
초록
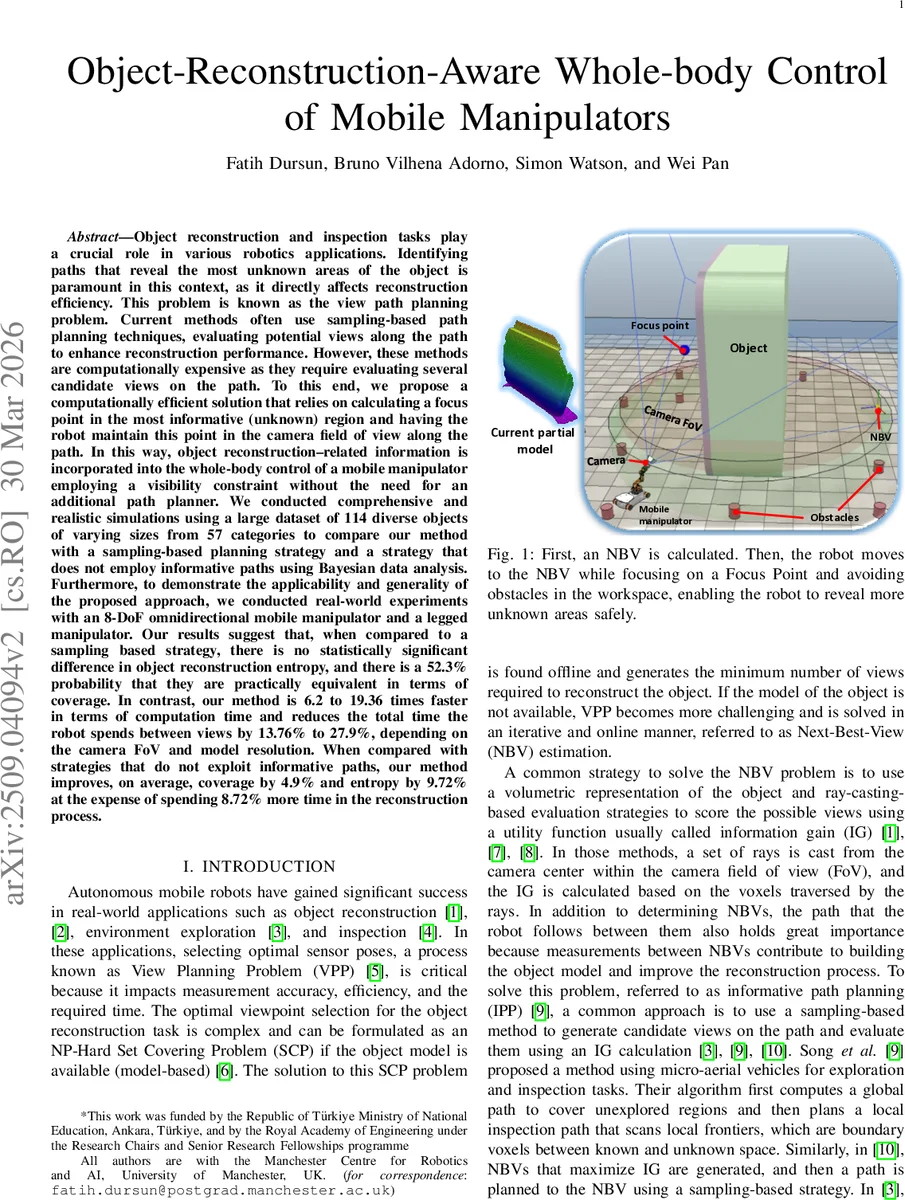
본 논문은 모바일 매니퓰레이터가 객체를 재구성할 때, 샘플링 기반 경로 계획의 높은 연산 비용을 없애고, 카메라 시야에 “포커스 포인트”를 유지하도록 전신 제어에 가시성 제약을 도입한다. NBV(Next‑Best‑View)만을 선택하고, 그 사이 경로에서는 가장 정보가 많은 영역을 동적으로 선정한 포커스 포인트를 카메라 시야에 고정함으로써, 재구성 엔트로피와 커버리지는 기존 방법과 동등하면서도 계산 시간은 6‑19배, 이동 시간은 14‑28% 절감한다. 시뮬레이션 114개 객체와 실제 8‑DoF 및 다리형 매니퓰레이터 실험을 통해 일반성과 효율성을 검증하였다.
상세 분석
이 연구는 객체 재구성 과제에서 “시점‑경로 계획”을 두 단계(NBV 선정 → 경로 최적화)로 나누는 전통적 접근을 재구성한다. 기존 샘플링 기반 IPP(Informative Path Planning)는 경로 상에 다수의 후보 뷰를 생성하고, 각각에 대해 레이‑캐스팅으로 정보 이득(Information Gain, IG)을 계산한다. 이 과정은 볼륨 해상도가 높아질수록 연산량이 기하급수적으로 증가한다. 저자는 이러한 병목을 해소하기 위해, 경로 상에서 뷰를 샘플링하지 않고, 로봇이 이동하는 동안 카메라 시야에 “포커스 포인트”를 유지하도록 제어한다. 포커스 포인트는 현재 부분 모델에서 가장 엔트로피가 높은(즉, 가장 불확실한) 영역을 레이‑캐스팅으로 탐색해 동적으로 정의된다. 이렇게 하면 경로 전체에 걸쳐 정보가 풍부한 영역을 지속적으로 관찰할 수 있다.
전신 제어는 로봇의 전 자유도(위치·자세)를 활용해 두 가지 제약을 동시에 만족한다. 첫째, 가시성 제약은 포커스 포인트가 카메라 시야(FoV) 안에 머물도록 하며, 이는 기존의 외부 경로 플래너 없이도 구현된다. 둘째, 벡터 필드 불평등(VFI)과 순환 제약을 이용해 장애물 회피와 로컬 최소점 탈출을 보장한다. 특히 카메라 롤 각이 FoV 부피에 미치는 영향이 작다는 사실을 이용해, 카메라의 위치와 바라보는 방향만을 제어함으로써 한 자유도를 해방시켜 제어 복잡도를 크게 낮춘다.
실험 설계는 두 단계로 구성된다. 시뮬레이션에서는 ShapeNet에서 추출한 114개의 객체(57개 카테고리)를 사용해, 제안 방법을 샘플링 기반 IPP와 “정보 비활용 경로”와 비교하였다. 베이지안 데이터 분석 결과, 엔트로피와 커버리지 측면에서 통계적으로 유의미한 차이가 없으며, 커버리지는 52.3% 확률로 실질적으로 동등함을 보였다. 계산 시간은 평균 6.2‑19.36배 빨라졌고, NBV 간 이동 시간은 카메라 FoV와 모델 해상도에 따라 13.76‑27.9% 감소하였다. 실제 로봇 실험에서는 8‑DoF 옴니디렉셔널 모바일 매니퓰레이터와 다리형 매니퓰레이터에 동일한 제어 프레임워크를 적용해, 복잡한 지형과 장애물 환경에서도 안정적인 재구성이 가능함을 입증했다.
핵심 기여는 (1) 전신 제어에 가시성 제약을 통합해 경로 상의 정보 획득을 연속적으로 최적화한 점, (2) 후보 뷰 샘플링을 완전히 배제함으로써 연산량을 크게 줄인 점, (3) 카메라 롤 자유도를 포기하지 않으면서도 다양한 로봇 플랫폼에 적용 가능한 일반성을 확보한 점이다. 이러한 접근은 고해상도 volumetric 모델을 필요로 하는 실시간 재구성, 탐사, 검사 작업에 특히 유용하며, 기존 학습 기반 NBV 방법이 갖는 사전 정의된 뷰셋 의존성을 극복한다.
댓글 및 학술 토론
Loading comments...
의견 남기기