비동기 샘플링 환경에서 시공간 위조 데이터 공격에 대한 안전 필터링
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
본 논문은 비주기적·비동기식으로 전송되는 센서 측정값과 타임스탬프를 이용하는 대규모 사이버‑물리 시스템에서, 측정값·타임스탬프 변조·패킷 삭제·위조 데이터 삽입 등 복합적인 위조 공격에 대비한 분산 추정 알고리즘을 제안한다. 각 센서는 로컬 칼만 필터를 비동기적으로 실행하고, 시간 예측을 통해 정렬된 후 ℓ₁ 정규화 가중 최소제곱 융합을 수행한다. 공격이 없을 때는 기존 연속‑시간 칼만 필터와 동일한 최적 추정치를 복원하고, 공격이 존재해도 관측 가능성 중복 가정 하에 오차가 유한하게 제한됨을 이론적으로 증명한다. IEEE 14버스 전력망 시뮬레이션을 통해 실효성을 확인하였다.
상세 분석
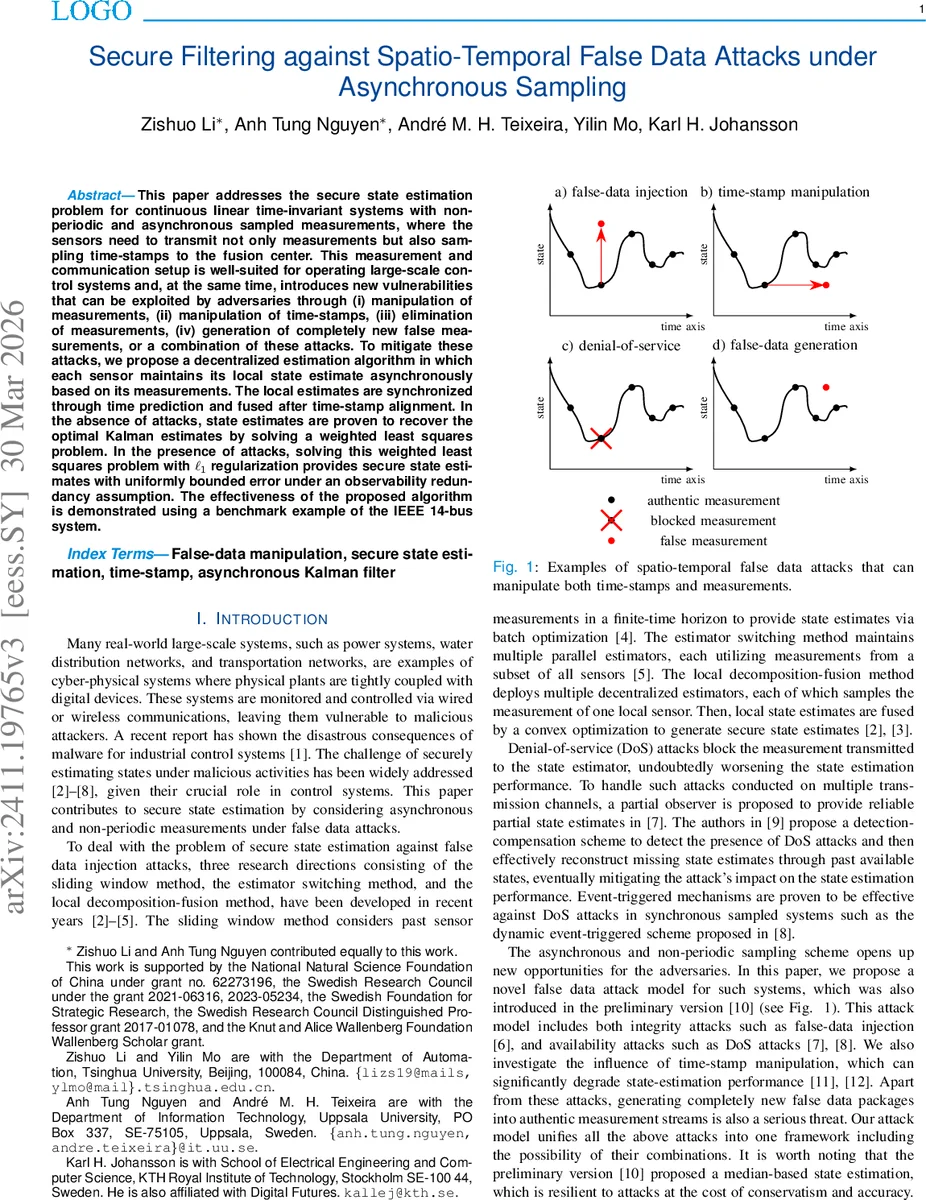
이 논문은 연속시간 선형 시불변(LTI) 시스템을 대상으로, 센서들이 비주기적·비동기식으로 측정값과 함께 정확한 시간 스탬프를 전송하는 상황을 모델링한다. 기존 연구는 동기식 샘플링이나 단일 공격 유형(예: 위조 데이터 주입, 서비스 거부)만을 고려했으나, 여기서는 네 가지 공격(측정값 변조, 타임스탬프 변조, 데이터 삭제, 완전 위조 데이터 생성)을 동시에 포함하는 ‘시공간 위조 데이터 공격’을 정의한다. 공격자는 고정된 p개의 센서를 조작할 수 있으며, 시스템은 2p‑희소 관측 가능성(2p‑sparse observable)이라는 관측 가능성 중복 가정을 만족해야 한다.
알고리즘은 먼저 비동기 샘플링 칼만 필터(Asynchronous Sampled‑Data KF)를 도입한다. 각 센서는 로컬 추정치 ζ_i
댓글 및 학술 토론
Loading comments...
의견 남기기