이폐 전자폐기물 부품 분할을 위한 대형·경량 비전 모델 비교 연구
** 본 논문은 노트북 분해 과정에서 촬영된 1,456장의 RGB 이미지로 구성된 신규 데이터셋을 활용해, 대규모 트랜스포머 기반 모델 SAM2와 경량 CNN 기반 모델 YOLOv8의 부품 세그멘테이션 성능을 비교한다. 데이터 증강과 전처리를 적용한 결과, YOLOv8은 mAP50 98.8 %·mAP50‑95 85 %를 기록하며 경계 정확도와 실시간 추론에서 우수함을 보였다. 반면 SAM2는 mAP50 8.4 %에 그쳐 중복 마스크와 불안정…
저자: Xinyao Zhang, Chang Liu, Xiao Liang
**
본 논문은 전자폐기물(E‑waste) 재활용 로봇이 부품을 정확히 분리·수거하기 위해 필수적인 ‘불규칙하고 밀집된 부품의 픽셀‑레벨 세그멘테이션’ 문제를 다룬다. 기존 연구들은 주로 객체 검출에 머물렀으며, 비정형 부품의 복잡한 경계와 낮은 대비를 충분히 다루지 못했다. 이를 보완하고자 저자들은 노트북 분해 과정에서 촬영한 1,456장의 RGB 이미지를 수집·주석화한 신규 데이터셋을 구축하였다. 데이터는 논리보드, 히트싱크, 팬 등 다양한 부품을 포함하고, 조명·각도·제조사 변이를 반영해 실제 현장의 복잡성을 재현한다.
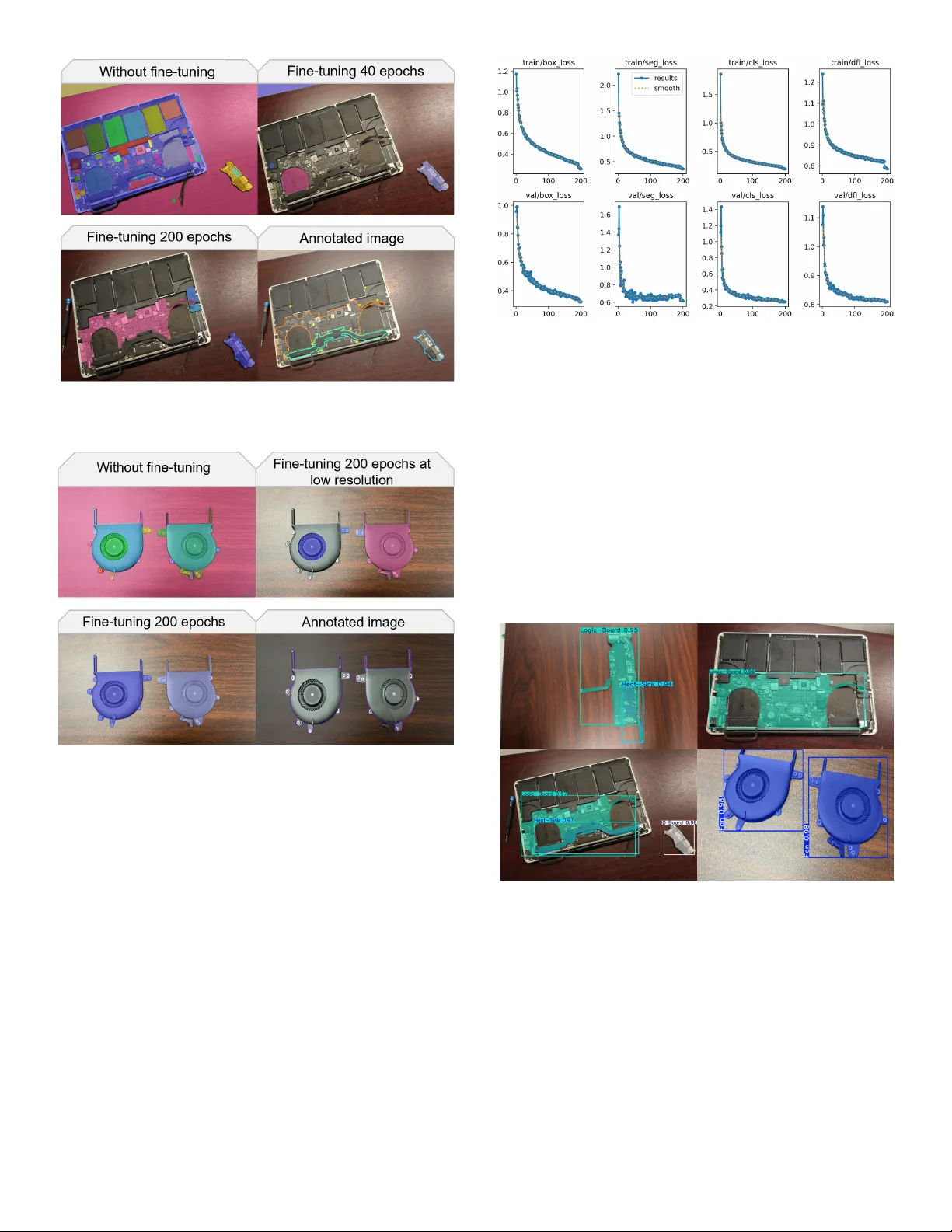
연구는 두 가지 최신 비전 모델을 비교한다. 첫 번째는 Meta에서 발표한 Segment Anything Model의 확장판인 SAM2이다. SAM2는 원본 SAM의 트랜스포머 기반 인코더‑디코더 구조에 계층적 피처 추출과 메모리 어텐션을 추가해, 비디오 데이터와 생성적 학습을 활용한다. 논문은 SAM2를 정적 이미지에 적용해 도메인‑특화 파인튜닝 없이도 성능을 평가한다. 두 번째는 경량 CNN 기반의 YOLOv8이다. YOLOv8은 CSPDarknet53 백본에 C2f 모듈을 도입해 멀티스케일 피처를 효율적으로 융합하고, 앵커‑프리 디코플링 세그멘테이션 헤드를 사용해 실시간 추론과 높은 정확도를 동시에 달성한다.
학습 전에는 랜덤 회전(±15°), 수평·수직 플립, 랜덤 크롭 등 데이터 증강을 적용해 모델의 일반화 능력을 강화하였다. 평가 지표는 COCO 스타일의 mAP50 및 mAP50‑95를 사용했으며, 경계 정밀도와 마스크 중복 여부도 추가적으로 분석하였다.
실험 결과, YOLOv8은 mAP50 98.8 %와 mAP50‑95 85 %를 기록하며, 경계 정확도와 작은 부품 검출에서 탁월한 성능을 보였다. 특히, 밀집된 부품 사이의 경계가 얇고 복잡한 경우에도 중복 마스크 없이 명확한 세그멘테이션을 제공하였다. 반면 SAM2는 mAP50 8.4 %에 그쳐, 전반적인 정확도가 크게 낮았다. 시각적으로도 SAM2는 동일 이미지 내에서 여러 겹치는 마스크를 생성하고, 불규칙한 윤곽을 만들어 로봇 그리퍼가 필요로 하는 정확한 위치 정보를 제공하지 못했다. 이는 대규모 사전학습 모델이 전자부품 특유의 금속 반사, 저대비 텍스처, 복합적인 형태에 대해 도메인‑특화 파인튜닝 없이 적용될 경우 성능 저하가 발생함을 시사한다.
논문은 두 모델의 장단점을 다음과 같이 정리한다. SAM2는 다양한 형태와 스케일을 포괄적으로 표현할 수 있는 잠재력을 가지고 있으나, 현재 설정에서는 실시간 로봇 제어에 필요한 정밀 마스크를 제공하지 못한다. YOLOv8은 경량이면서도 높은 정확도와 실시간 추론 속도를 제공해 실제 산업 현장에 바로 적용 가능하지만, 클래스‑불가지 마스크와 같은 범용성을 제공하지 않는다. 따라서 모델 선택은 작업 목표(예: 빠른 추론 vs. 복합 형태 포괄)와 시스템 제약(연산 자원, 실시간 요구)에 따라 달라질 수 있다.
또한, 대규모 사전학습 모델을 산업용 데이터에 적용하려면 도메인‑특화 파인튜닝, 레이어별 학습률 조정, 혹은 경량화된 트랜스포머 변형이 필요함을 강조한다. 저자는 데이터셋과 벤치마크 프레임워크를 공개함으로써, 향후 연구자들이 다양한 모델을 비교·개선하고, 전자폐기물 재활용 로봇 시스템에 최적화된 비전 알고리즘을 개발할 수 있는 기반을 제공한다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기