쿼터니언 기반 무향상 칼만 필터를 이용한 인간 UAV 물리적 상호작용 시 외력 추정
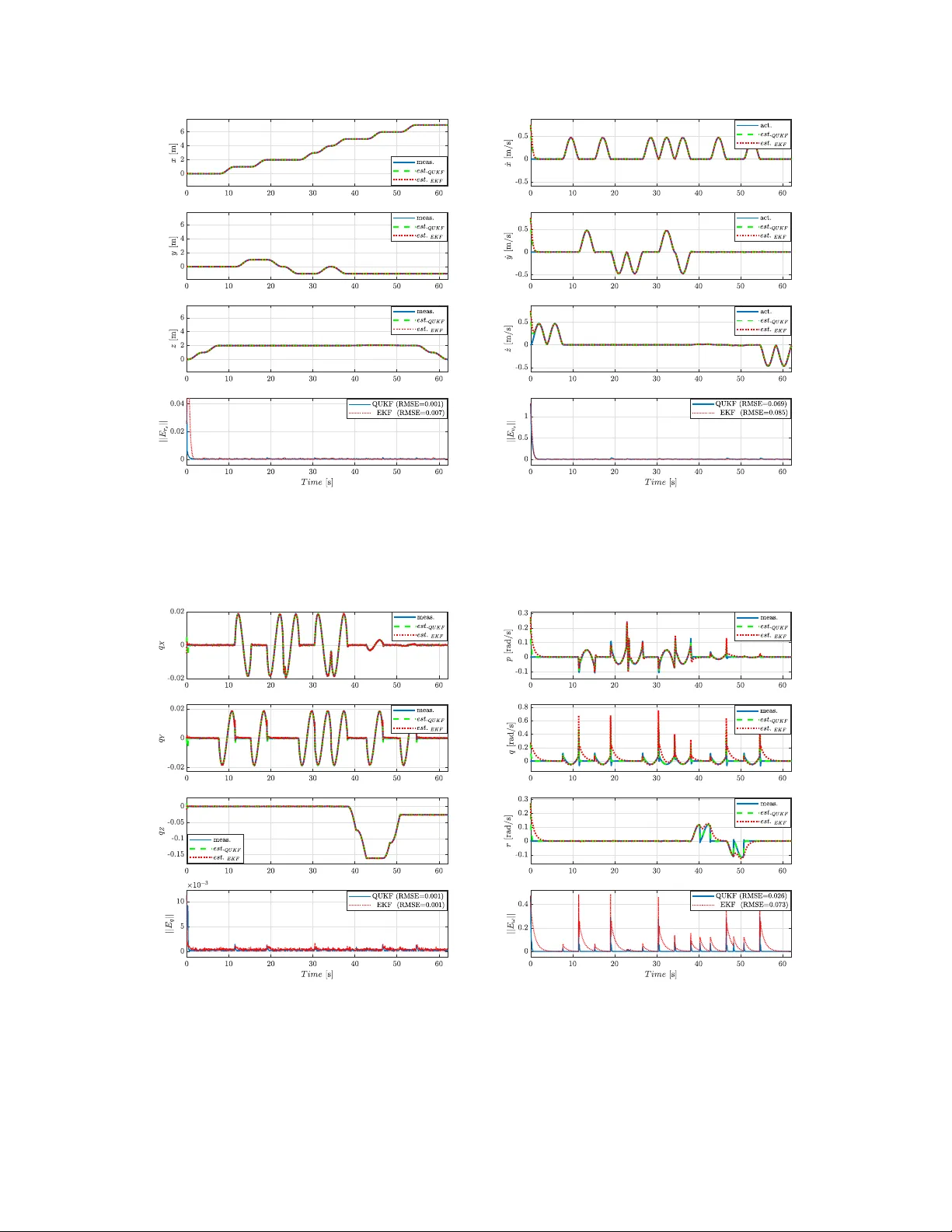
본 논문은 인간이 직접 가이드하는 협동형 UAV 페이로드 운송에서, 6축 힘·토크 센서를 사용하지 않고도 외부 와크(힘·토크)를 실시간으로 정확히 추정할 수 있는 Quaternion‑based Unscented Kalman Filter(QUKF)를 제안한다. 단위 쿼터니언을 상태 변수로 사용해 회전 특이점(gimbal lock)을 완전히 제거하고, 비선형 동역학을 그대로 보존함으로써 기존 EKF 대비 위치·각속도·토크 추정 정확도가 각각 79 …
저자: Hussein Naser, Hashim A. Hashim, Mojtaba Ahmadi
본 논문은 인간이 직접 가이드하는 협동형 UAV 페이로드 운송 시스템에서, 무게와 비용 문제로 인해 6축 힘·토크 센서를 장착하기 어려운 상황을 해결하고자 센서리스 외력 추정 방법을 제안한다. 서론에서는 UAV‑협동 운송의 필요성, 기존 물리적 센서의 한계, 그리고 필터 기반 추정 기법의 발전 흐름을 소개한다. 특히, 기존 EKF와 MEKF, IEKF, Lie‑Group‑UKF 등 다양한 비선형 필터가 회전 특이점 문제를 완화하려 했지만, 여전히 오일러 각 기반 구현에서는 gimbal lock 위험이 존재함을 지적한다.
문제 정의에서는 두 대의 쿼드로터가 강체 페이로드를 공동으로 운반하는 모델을 설정하고, 인간이 가하는 외부 힘·토크를 ‘와크’라는 형태로 표현한다. 시스템 동역학은 6자유도(3번역·3번회전)와 외부 와크를 포함한 비선형 방정식으로 기술되며, 회전 부분은 단위 쿼터니언 \(q\in S^3\) 로 표현한다. 쿼터니언 미분식 \(\dot q = \frac12\Omega(\omega)q\)와 회전 행렬과의 변환 관계를 상세히 제시하고, 쿼터니언의 정규화 제약을 유지하기 위한 수치적 방법을 논한다.
핵심 기여는 ‘Quaternion‑based Unscented Kalman Filter(QUKF)’이다. QUKF는 상태 벡터 \(\mathbf{x} =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기