고정 이득 분산 칼만 필터 설계
본 논문은 무선 센서 네트워크에서 이산 시간 선형 시스템을 대상으로, 전역 BLUE 추정기의 정상 상태 오차 공분산을 이용해 고정 이득 분산 관측기를 오프라인으로 설계하는 방법을 제시한다. 설계된 관측기는 각 노드가 이웃과 상태 추정치만 교환하며, 공분산 전파 없이 실시간 추정을 수행한다. 집합 가시성 및 강한 연결성을 가정하면, 고정 이득 스킴 중 최적의 정상 상태 성능을 달성한다.
저자: Francisco Rego
본 논문은 무선 센서 네트워크(WSN) 환경에서 이산‑시간 선형 시스템의 상태를 분산적으로 추정하기 위한 새로운 고정 이득(steady‑state) 관측기 설계 방법을 제안한다. 기존의 분산 칼만 필터(DKF)와 공분산 교차(CI) 기반 방법은 매 시간 단계마다 공분산 행렬을 전파하거나, 여러 차례의 합의 과정을 수행해야 하는데, 이는 네트워크 규모가 커질수록 통신량과 연산 복잡도가 급증한다는 한계가 있다. 저자는 이러한 문제를 해결하고자, 전역 분산 BLUE(Best Linear Unbiased Estimator)의 정상 상태 오차 공분산 \(\bar P\)을 이용해 관측기 이득을 오프라인에서 한 번만 계산하는 방식을 도입한다.
먼저, 시스템 모델을 \(x_{t+1}=Ax_t+w_t\), \(y_{i,t}=C_i x_t+v_{i,t}\) 로 정의하고, 전체 측정 행렬 \(C=\operatorname{col}(C_i)\) 가 집합 가시성(detec‑tability)을 만족한다는 가정(A1)을 둔다. 프로세스 잡음 \(w_t\sim\mathcal N(0,Q)\), 측정 잡음 \(v_{i,t}\sim\mathcal N(0,R_i)\) 은 서로 독립이며, 모든 노드는 동기화되고 한 번에 하나의 메시지를 전송할 수 있다고 가정한다(A2‑A4).
이후, 기존의 시간‑가변 분산 BLUE(식 8‑9)를 소개한다. 이 방법은 전역 공분산 \(\bar P_t\)와 교차 공분산을 실시간으로 업데이트하면서 최적 추정치를 계산하지만, 각 노드가 전체 공분산 정보를 보유해야 하므로 실용적이지 않다.
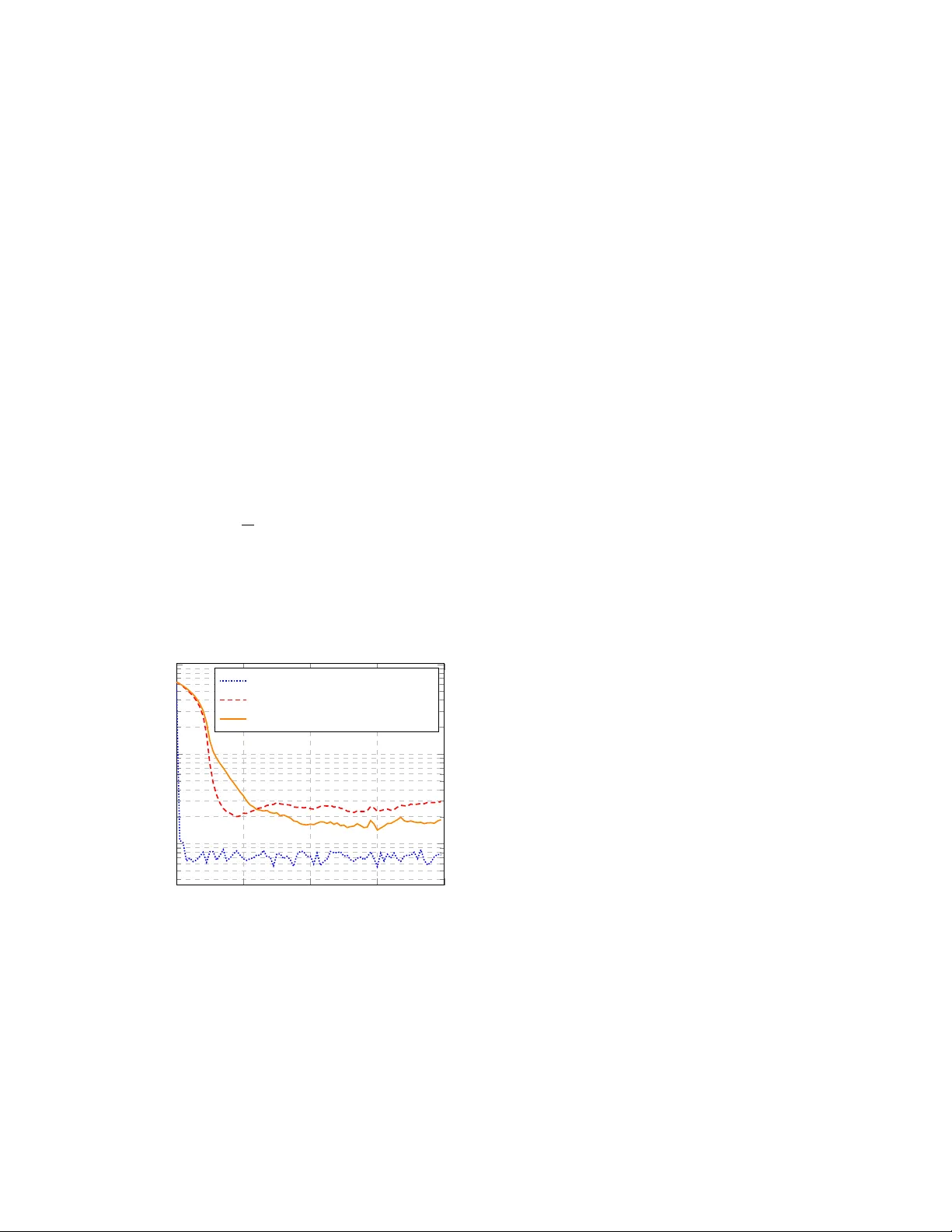
핵심 아이디어는 전역 공분산 재귀식이 수렴하면 \(\bar P=\lim_{t\to\infty}\bar P_t\) 를 얻을 수 있다는 점이다. 수렴한 \(\bar P\) 로부터 각 노드 i에 대한 정보 행렬 \(\Omega_i=1_i^T(\eta_i\bar P\eta_i^T)^\dagger1_i+S_i\) (여기서 \(S_i=C_i^TV_iC_i\), \(V_i=R_i^{-1}\)) 를 정의하고, 고정 이득을 다음과 같이 구한다.
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기