연속 로봇을 위한 다중 곡률‑힘 추정 통합 프레임워크
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
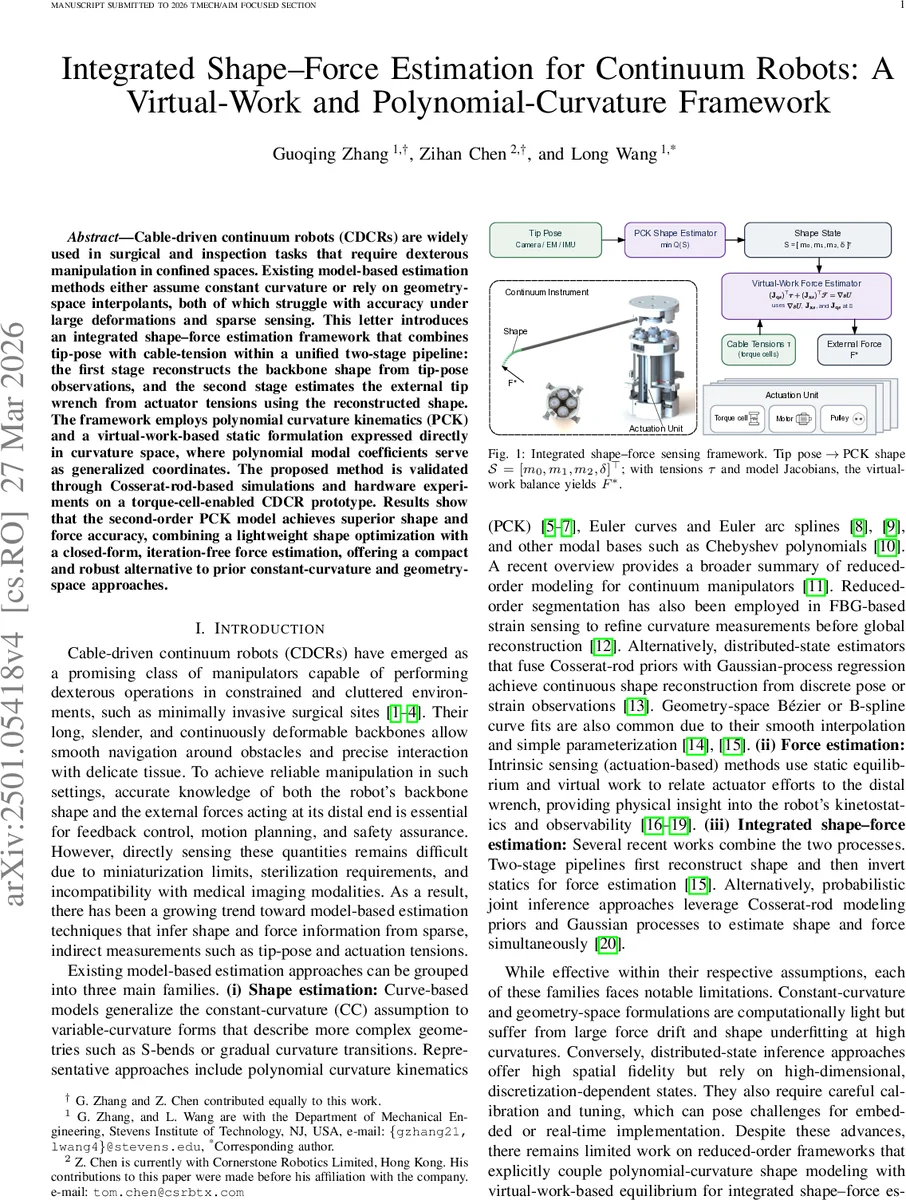
본 논문은 케이블 구동 연속 로봇의 백본 형태와 외부 팁 힘을 동시에 추정하기 위한 두 단계 파이프라인을 제안한다. 2차 다항 곡률 모델(PCK2)을 이용해 제한된 팁 포즈 센서와 케이블 장력(토크 셀) 데이터를 결합하고, 곡률 공간에서 가상 작업 원리를 적용해 폐쇄형 힘 추정을 수행한다. 시뮬레이션 및 실험 결과, 기존 상수 곡률 및 기하학적 보간 방식보다 높은 정확도와 실시간성을 확보한다.
상세 분석
이 연구는 연속 로봇의 형태와 외부 힘을 동시에 추정하는 문제를 ‘곡률‑공간’이라는 새로운 차원에서 접근한다는 점에서 혁신적이다. 기존 방법은 보통 상수 곡률 가정이나 베지어·B‑스플라인 같은 기하학적 보간을 사용해 형태를 재구성하고, 장력‑기반 힘 추정은 별도로 수행한다. 그러나 이러한 접근은 큰 변형이나 센서가 희박할 때 모델링 오차가 급증한다. 논문은 먼저 백본 곡률을 다항식으로 표현하고, 차수 j = 2인 2차 다항 곡률 모델(PCK2)을 선택한다. 곡률 κ(s)=m₀+m₁s+m₂s² 로 정의하고, 이를 적분해 각도 θ(s)와 위치 p(s)를 얻는다. 여기서 m₀,m₁,m₂와 전역 굽힘 평면 각도 δ가 형태 상태 S=
댓글 및 학술 토론
Loading comments...
의견 남기기