분할 그래프의 방향 기하와 이방성 연구
본 논문은 정수 분할 그래프 Gₙ에 대해 주요 사슬, 자기공액 축, 척추, 경계 프레임워크 등 네 개의 기준 집합을 선택하고, 각 집합에 대한 거리 함수 d_S를 이용해 쉘 구조와 내부·외부·수평 세 종류의 엣지 방향을 정의한다. 모든 정점은 선택된 기준 집합으로 향하는 단조 내향 지오데식(방향 복도)을 갖는 것을 증명하고, 연결된 Gₙ에서 두 기준 집합이 동일한 엣지 방향장을 만들려면 거리 차이가 상수여야 함을 보인다. 이는 Gₙ의 이방성을 …
저자: Fedor B. Lyudogovskiy
본 연구는 정수 분할 그래프 Gₙ에 새로운 방향 기하학적 프레임워크를 도입한다. 먼저, Gₙ의 정점은 n의 모든 파티션이며, 두 파티션이 하나의 단위 전이와 재정렬을 통해 인접함을 정의한다. 기존 연구에서 제시된 네 개의 “기준 집합”—주 사슬 Mₙ, 자기공액 축 Axₙ, 척추 Spₙ, 경계 프레임워크 Frₙ—을 선택하고, 각 집합에 대해 거리 함수 d_S를 정의한다. 이 거리 함수는 해당 집합까지의 최단 거리이며, 이를 기반으로 r‑쉘 Sh(r)_S와 폐쇄 이웃 N(≤r)_S를 구성한다. 이러한 쉘 구조는 그래프를 동심원 형태로 층화시키며, 각 쉘 사이의 엣지는 거리 차이가 정확히 1이므로 자연스럽게 방향을 부여한다.
섹션 3에서는 엣지 수준에서의 방향을 공식화한다. 인접 정점 λ∼µ에 대해 d_S(µ)=d_S(λ)−1이면 λ→µ는 S‑inward, d_S(µ)=d_S(λ)+1이면 S‑outward, 동일하면 S‑level이라 정의한다. 이때 모든 엣지는 내부(두 정점 모두 S에 속함), 전이(거리 차이가 1), 혹은 수평(거리 차이가 0) 중 하나에 속한다는 사실을 증명한다. 또한, 엣지의 복합 서명 Σ(λ,µ)=(σ_M,σ_Ax,σ_Sp,σ_Fr) 를 도입해 네 개의 기준 집합에 대한 방향을 동시에 기록하고, 모든 비영(0이 아닌) 성분이 같은 부호를 가질 경우 “방향 일관성”, 그렇지 않으면 “방향 혼합”이라고 명명한다. 이는 Gₙ가 단일 전역 방향장을 갖지 않으며, 서로 다른 기준 집합이 서로 다른 방향 패턴을 만든다는 직관을 정량화한다.
섹션 4에서는 경로 수준으로 확장한다. S‑monotone inward 경로는 각 단계에서 거리값이 1씩 감소하는 경로이며, 길이가 d_S(λ₀)인 경우 최단 경로이므로 “방향 복도”라 부른다. Lemma 4.3은 거리값이 양수인 정점 λ에 대해 d_S(λ)−1인 이웃이 항상 존재함을 보이며, 이를 귀납적으로 적용해 모든 정점이 최소 하나의 S‑directional corridor를 갖는 것을 Proposition 4.4에서 증명한다. 이러한 복도는 “제어된 접근 원리”와 연결되어, 기준 집합의 유한 반경 N(≤r)_S 안에 있는 모든 정점은 해당 복도를 따라 S로 들어올 수 있음을 의미한다. 이는 기존의 “제어된 이웃 영역” 개념을 경로 기반으로 재해석한 결과이다.
섹션 5는 논문의 핵심 정리인 방향 동등성 정리(Theorem 5.5)를 제시한다. Gₙ가 연결돼 있음을 전제하고, 두 기준 집합 S와 T가 모든 엣지에 대해 동일한 방향 부호를 가질 경우 d_S−d_T는 상수 함수가 된다. 반대로 거리 차이가 상수이면 두 집합은 완전히 같은 방향장을 만든다. 따라서 서로 다른 기준 집합은 언제나 서로 다른 방향장을 유도한다는 결론을 얻는다. 이는 Gₙ가 본질적으로 이방성(anisotropy)을 가지고 있음을 엄밀히 증명한 최초의 결과이며, “방향 필드”라는 새로운 관점을 제공한다.
또한, 높이 함수 h(λ)=∑ i·λ_i 를 이용해 모든 엣지를 높이가 작은 쪽에서 큰 쪽으로 향하도록 정향시킬 수 있음을 Lemma 5.1과 Proposition 5.2에서 보인다. 이 정향은 사이클을 만들 수 없으며, 거리 기반 방향과는 독립적인 전역적인 방향 구조를 제공한다. 저자는 이를 “전역 높이 방향”이라 부르며, 이후 섹션에서 쉘 기반 방향과 비교 분석한다.
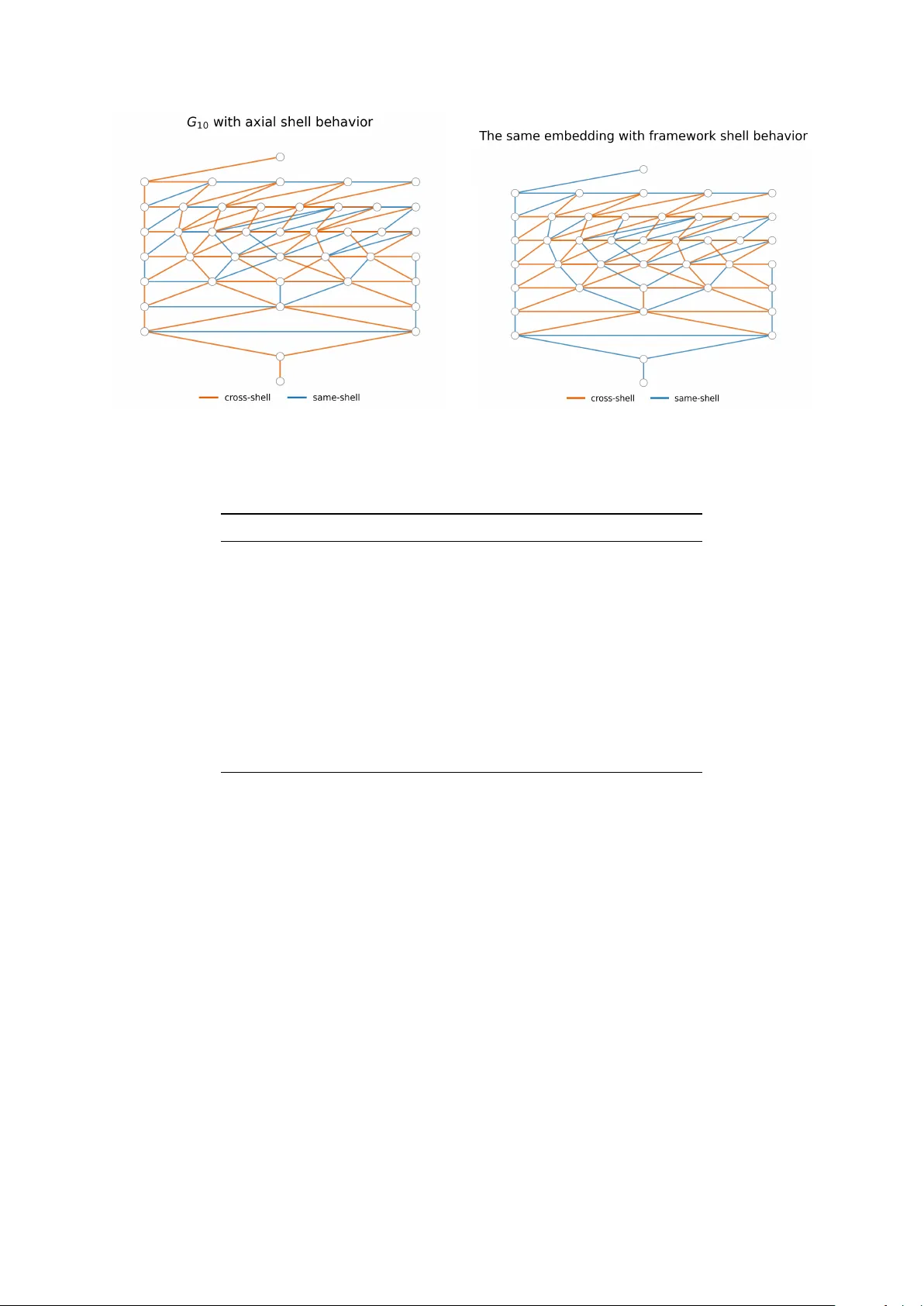
마지막으로 섹션 6에서는 n=8~12 범위에 대한 컴퓨터 실험을 수행한다. 각 기준 집합에 대한 쉘 구조를 시각화하고, 엣지 혼합 비율, 지역 차수, 단순체 차원, 지원 크기, 높이 등 다양한 정점 특성에 대한 “방향 드리프트 프로파일”을 계산한다. 결과는 예를 들어, 축 방향(Axₙ) 복도가 다른 기준 집합에 비해 더 높은 내부 이동 비율을 보이며, 경계 프레임워크(Frₙ) 주변은 외향 엣지가 우세함을 보여준다. 이러한 정량적 데이터는 이론적 이방성 개념을 실증적으로 뒷받침하고, 향후 그래프 이론 및 조합 최적화에서 방향 기반 알고리즘 설계에 활용될 수 있다.
전체적으로 논문은 Gₙ의 구조적 복잡성을 “방향”이라는 새로운 차원에서 조명하고, 기준 집합 간의 거리 차이와 엣지 방향을 통해 이방성을 엄밀히 정의·증명한다. 또한, 경로 기반 복도와 제어된 접근 원리를 통해 기존의 정성적 관찰을 정량적·구조적 결과로 승화시켰으며, 계산적 아틀라스를 통해 실제 그래프에서의 방향 현상을 시각화한다. 이는 조합 그래프 이론, 대칭성 분석, 그리고 방향성 기반 네트워크 모델링에 새로운 연구 방향을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기