RF 신호 의미 기반 증분 학습을 통한 무인기 오픈셋 분류
본 논문은 무인기(UAV) RF 신호를 이용해 알려진 드론은 정확히 분류하고, 미지의 드론은 자동으로 탐지·클러스터링한 뒤 메모리 제한 재현 학습으로 증분 업데이트하는 통합 프레임워크를 제안한다. Mahalanobis 거리 기반 오픈셋 인식, 복합 유효성 점수에 의한 K‑Means·GMM 선택 클러스터링, 제한된 replay 메모리로 재학습을 수행한다. 실제 24종 드론 데이터셋에서 높은 오픈셋 검출률과 안정적인 증분 적응을 확인하였다.
저자: Julie Liu, Irshad A. Meer, Cicek Cavdar
무인기(UAV)의 급격한 보급으로 공역 안전과 프라이버시 보호를 위한 드론 식별 기술이 필요해졌다. 특히 RF 기반 식별은 시야·조명에 구애받지 않아 실용성이 높지만, 기존 연구는 대부분 폐집합(closed‑set) 가정을 전제로 모든 드론 종류를 사전에 학습한다. 실제 운용 환경에서는 새로운 모델이나 변형된 하드웨어가 지속적으로 등장해 미지의 신호가 빈번히 발생한다. 이러한 상황에서 기존 분류기는 미지의 신호를 기존 클래스에 과신하게 할당해 위험을 초래한다. 따라서 오픈셋 인식(open‑set recognition, OSR)과 증분 학습(incremental learning, IL)을 결합한 프레임워크가 요구된다.
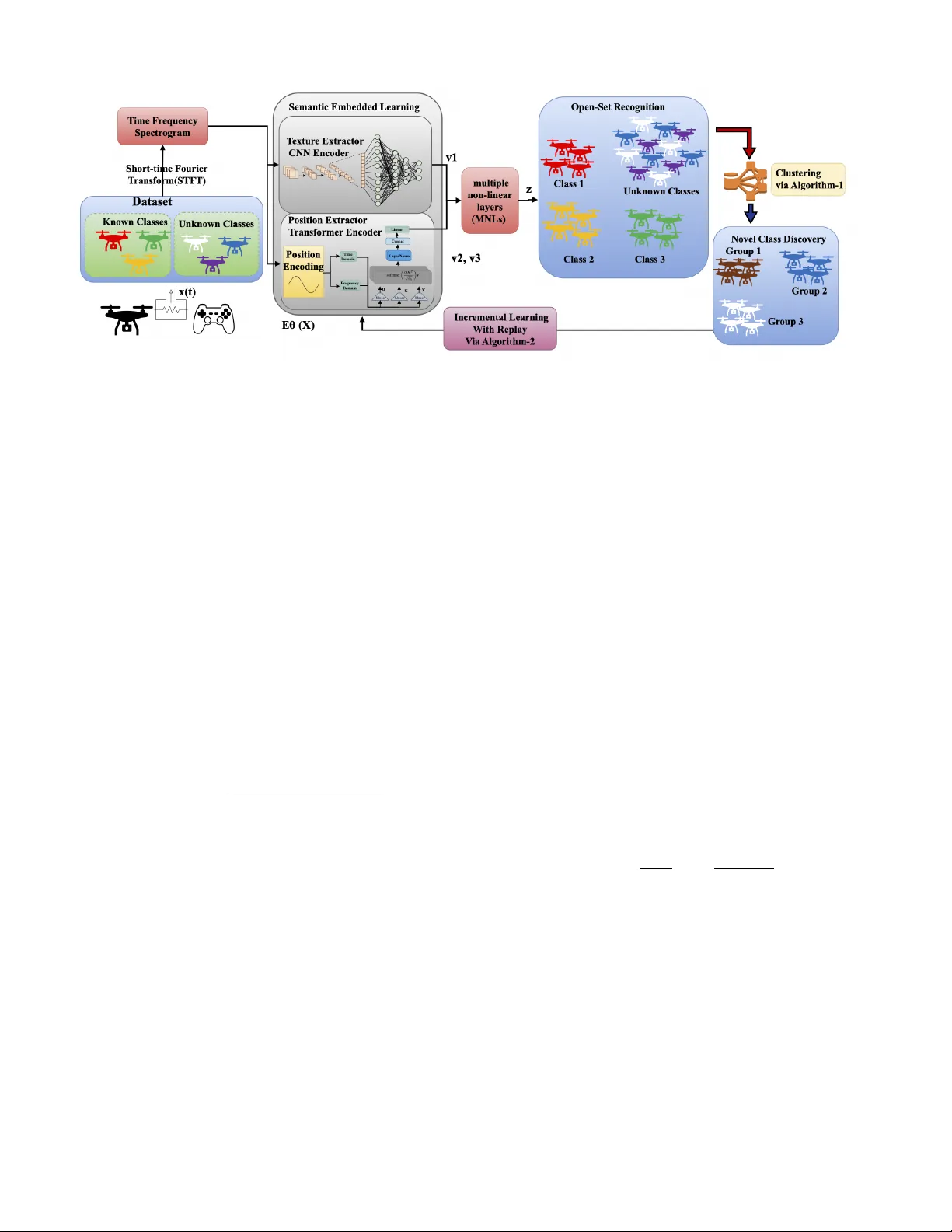
본 논문은 이러한 요구를 충족시키기 위해 ‘증분 오픈셋 학습 프레임워크’를 제안한다. 전체 흐름은 (1) 의미 임베딩 학습, (2) 오픈셋 판정, (3) 미지 샘플 클러스터링, (4) 증분 모델 업데이트의 네 단계로 이루어진다. 첫 단계에서는 RF 신호를 STFT로 변환한 스펙트로그램을 입력으로, dilated CNN과 Transformer를 병렬로 결합한 하이브리드 인코더를 사용한다. 다중 스케일 텍스처와 시간‑주파수 위치 정보를 동시에 학습함으로써 D 차원의 의미 임베딩을 얻는다. 학습 손실은 클래스 내 응집성(L_cen), 클래스 간 분리성(L_sep), 교차 엔트로피(L_CE)를 가중합한 복합 손실이며, 이는 동일 클래스는 서로 가깝게, 다른 클래스는 멀리 배치하도록 유도한다.
두 번째 단계에서는 각 알려진 클래스 k에 대해 평균 μ_k와 공분산 Σ_k를 추정하고, Mahalanobis 거리 d_k(z)를 계산한다. 거리 분포의 평균과 표준편차를 이용해 3σ 임계값 τ_k를 설정함으로써 99.7 % 신뢰 구간을 정의한다. 테스트 샘플이 모든 클래스의 τ_k를 초과하면 ‘unknown’으로 판정하고, 해당 임베딩을 버퍼 U에 저장한다. 이 방식은 파라미터 튜닝이 거의 필요 없으며, 통계적 근거가 명확하다.
세 번째 단계에서는 버퍼 U에 충분한 샘플이 모이면 클러스터링을 수행한다. 임베딩 행렬 Z를 표준화하고 차원이 64를 초과하면 PCA로 차원을 축소한다. 이후 K‑Means와 Gaussian Mixture Model(GMM)을 각각 다양한 k값에 대해 학습하고, 실루엣, Calinski‑Harabasz, Davies‑Bouldin, 설명된 분산을 가중합한 복합 점수 Q(k)를 계산한다. 엘보우 방법으로 얻은 k_elbow와 Q(k) 최대값 k_score를 비교해 최적 클러스터 수 k*를 결정한다. 최종적으로 GMM(또는 K‑Means)으로 라벨을 할당하고, 순도 τ_p와 크기
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기