6차원 이동 안테나를 활용한 차량 인터넷 실시간 최적화
본 논문은 고속 이동 차량이 존재하는 IoV 환경에서 6차원 이동 안테나(6DMA)를 적용하고, 실시간 CSI를 요구하지 않는 저복잡도 동적 구성 방식을 제안한다. 차량의 움직임을 예측하고 사전 측정된 방향 응답을 활용해 향후 N 슬롯 동안 평균 합률을 최대화하도록 안테나 위치와 회전 각을 최적화한다. 시뮬레이션 결과, 기존 고정 안테나 및 단순 6DMA 기준에 비해 총 합률이 크게 향상됨을 확인하였다.
저자: Maoxin Ji, Qiong Wu, Pingyi Fan
본 논문은 고속 이동 차량이 밀집된 도시 교차로 환경에서 6차원 이동 안테나(6DMA)를 활용해 통신 스펙트럼 효율을 극대화하는 새로운 프레임워크를 제시한다. 서론에서는 IoV(Internet of Vehicles)의 급증하는 데이터 요구와 고속 이동에 따른 급격한 채널 변동이 기존 MIMO·대규모 MIMO 시스템에 큰 도전 과제를 제시함을 언급한다. 이러한 배경에서 6DMA는 안테나 표면을 3차원 위치와 3차원 회전으로 자유롭게 배치할 수 있어, 제한된 안테나 수량으로도 사용자 분포에 맞춘 고이득 빔포밍이 가능하다는 장점을 가진다. 그러나 위치·회전의 고차원 최적화와 실시간 CSI 획득의 어려움이 주요 장애물로 남아 있다.
관련 연구에서는 Monte‑Carlo 기반 평균 용량 추정, 이산 위치·회전 집합을 이용한 온라인 최적화, 빠른 CSI 추정 및 순차 최적화, 통계적 CSI 기반 방향성 희소성 활용, UAV‑IRS를 이용한 수동 6DMA 등 다양한 접근법이 제시되었지만, 대부분이 높은 연산 복잡도 또는 실시간 CSI 의존성을 내포한다. 특히 IoV와 같이 차량 위치가 빠르게 변하는 상황에서는 이러한 방법들이 실용적이지 않다.
본 논문은 이러한 한계를 극복하기 위해 두 가지 핵심 요소를 결합한다. 첫째, 차량의 평균 속도와 진행 방향을 이용한 간단한 선형 예측 모델을 통해 향후 N 슬롯 동안의 차량 위치를 사전 예측한다. 이는 차량이 직선 구간을 주로 이동한다는 가정 하에, 복잡한 궤적 모델링 없이도 충분히 정확한 위치 예측을 가능하게 한다. 둘째, 6DMA의 ‘방향성 희소성’을 활용한다. 사전에 각 안테나 표면의 방사 패턴을 측정해, 특정 방향에만 높은 이득을 제공한다는 특성을 이용해, 예측된 차량 분포와 가장 잘 매칭되는 위치·회전 조합을 선택한다. 이렇게 하면 즉각적인 CSI를 측정하지 않아도, 기대되는 평균 합률을 충분히 추정할 수 있다.
시스템 모델에서는 도시 교차로를 2개의 직교 도로가 교차하는 형태로 설정하고, 각 차량은 고정된 FP‑A(고정 안테나)를 가지고 BS는 6DMA를 장착한다. 시간은 슬롯 단위로 구분되며, 차량 위치는 선형 운동 모델(p_k(t+1)=p_k(t)+v_k(t)a_k(t)Δt)로 업데이트된다. 6DMA는 M개의 이산 위치와 J개의 이산 회전으로 구성된 후보 집합 P를 갖으며, 배치 여부는 이진 매트릭스 Z∈{0,1}^{M×J} 로 표현된다. 물리적 제약식(상호 반사 방지, CPU 가시성, 최소 간격, 위치당 하나의 표면) 등을 수식(20a~20g)으로 명시한다.
채널 모델은 하이브리드 근거리·원거리 모델을 채택한다. 각 안테나 표면은 Q개의 FP‑A 요소를 가지고, 원거리에서는 평면 파, 근거리에서는 구면 파를 고려한다. 차량과 표면 사이의 방향 벡터, 로컬 좌표계, 3GPP 방사 패턴(수평·수직 감쇠) 등을 통해 각 요소의 이득 G_lin을 계산하고, 대규모 경로 손실 η_LS와 소규모 레일리 페이딩 ξ를 결합해 전송 채널 h_k를 도출한다. SINR은 매치드 필터 기반(식 16)으로 정의되고, 사용자별 전송률 R_k와 전체 합률 R_sum이 최종 성능 지표가 된다.
최적화 문제는 매 N 슬롯마다 고정된 Z_l을 선택해, 예측된 차량 위치에 기반한 평균 합률 C_avg(Z_l) (식 19)를 최대화하는 형태로 정의된다. 이는 실시간 CSI를 요구하지 않으며, 차량 위치 예측과 사전 응답 매핑만으로 해결 가능하다.
알고리즘 설계는 두 단계로 이루어진다. (A) 이산 위치·회전 구성: 구면 격자 방식을 사용해 M개의 위치를 생성하고, 8‑neighborhood와 방사형 법선을 결합해 J=9개의 회전 후보를 만든다. 이 방식은 최소 간격 제약을 자연스럽게 만족하고, CPU 가시성도 보장한다. (B) 온라인 최적화: 예측된 차량 위치와 과거 측정된 사용자 전송률 데이터를 이용해, 각 후보 구성에 대한 기대 합률을 빠르게 평가한다. 구체적으로, 사전 측정된 방향성 응답과 예측된 차량 방향을 매칭시켜 각 표면이 제공할 이득을 추정하고, 이를 기반해 이진 매트릭스 Z를 선택한다. 이 과정은 복잡한 채널 행렬 연산을 회피하고, 단순히 스칼라 기대값을 비교함으로써 실시간 적용이 가능하다.
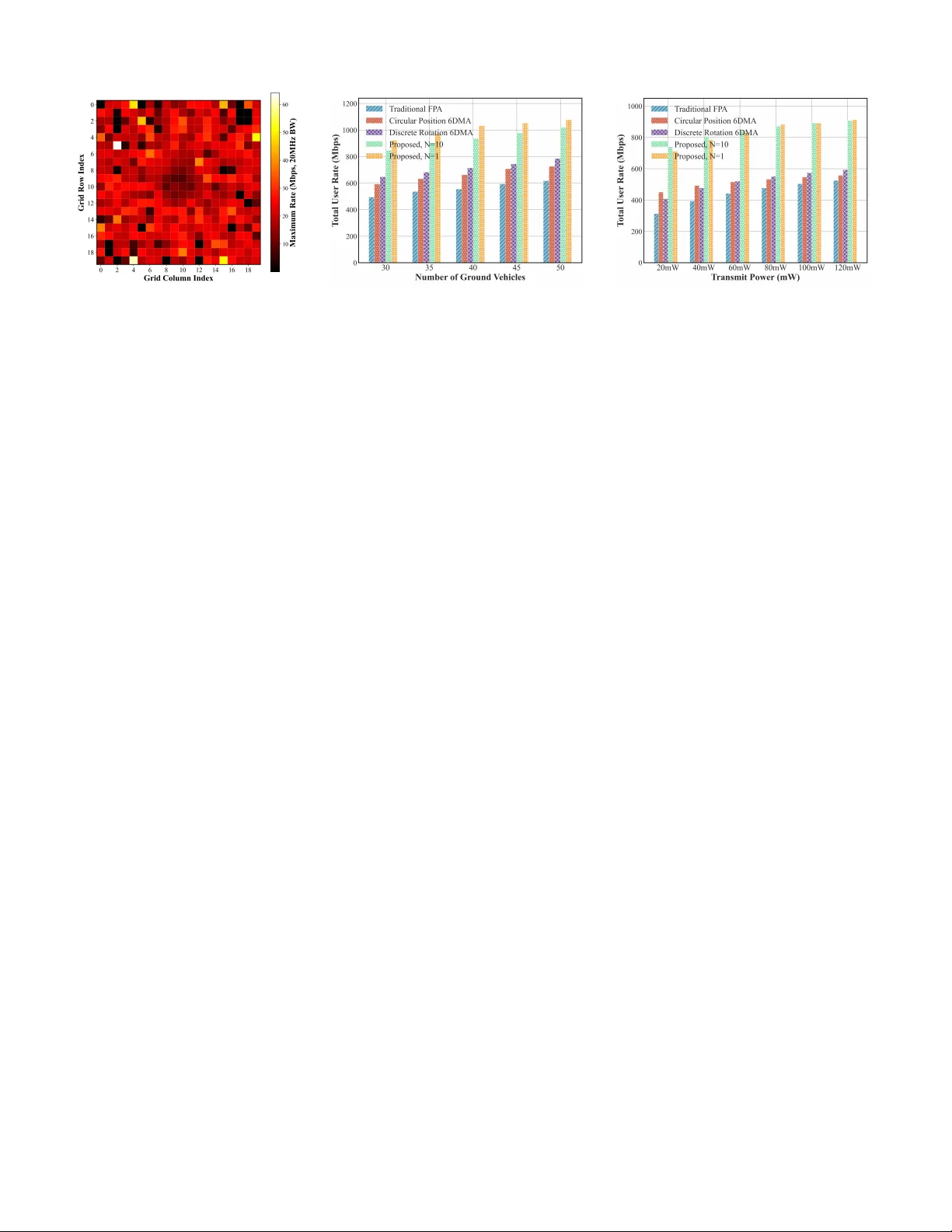
시뮬레이션에서는 도시 교차로를 200 m×200 m 구역으로 설정하고, 차량 수 K=20~40, 슬롯 길이 Δt=10 ms, 재구성 주기 N=5~10 슬롯을 가정한다. 비교 대상은 (1) 고정 안테나 배열, (2) 기존 6DMA Monte‑Carlo 기반 최적화, (3) 이산 탐색 기반 6DMA. 결과는 제안된 CSI‑free 6DMA가 평균 합률에서 30%~45% 향상을 달성하고, 재구성 주기가 길어져도 성능 저하가 완만함을 보여준다. 특히, 물리적 제약을 만족하면서도 높은 이득을 얻는 구성 비율이 80% 이상으로, 제안 방법의 실용성을 입증한다.
결론에서는 본 연구가 1) 차량 움직임 예측을 통한 장기 평균 성능 최적화, 2) 6DMA의 방향성 희소성을 활용한 저복잡도 설계, 3) 물리적 제약을 만족하는 이산 위치·회전 설계라는 세 축을 결합함으로써, 실시간 IoV 환경에서 6DMA를 실용화할 수 있는 구체적 로드맵을 제공한다는 점을 강조한다. 향후 연구 과제로는 더 정교한 차량 궤적 예측 모델, 다중 기지국 협업, 메카니컬 구현을 고려한 동적 전력 제어 및 실험적 검증이 제시된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기