해수면·UAV 동요를 고려한 물‑공기 광전송 종단 모델링
** 본 논문은 LED 기반 수중 센서와 실리콘 포톤멀티플라이어(SiPM) 수신기를 탑재한 UAV 간의 직접 물‑공기(W2A) 광통신 링크를 종합적으로 모델링한다. 몬테카를로 레이 트레이싱을 이용해 물속 흡수·산란, 기포에 의한 Mie 산란, JONSWAP 스펙트럼 기반 파도면, 그리고 풍속에 따른 UAV 진동(Dryden 모델)을 모두 포함한 채널 손실을 계산한다. 또한 UAV 기울기에 대한 폐쇄형 손실식과 다양한 LED 발산각·수신기 시…
저자: Mohamed Nennouche, Mohammad-Ali Khalighi, Alexis Alfredo Dowhuszko
**
본 논문은 해양 생물다양성 모니터링을 위한 데이터 전송 수단으로, 수중 센서와 근접한 고고도 UAV 간의 직접 물‑공기(Water‑to‑Air, W2A) 광통신 링크를 제안하고, 이를 정량적으로 평가하기 위한 종합적인 채널 모델링 프레임워크를 구축하였다. 연구 배경으로는 기존의 수중‑공기 통신이 주로 수면 부표나 자율수상차량(ASV)을 중계 노드로 사용해 복잡한 인프라와 높은 비용을 초래한다는 점을 들며, 얕은 해양(깊이 <50 m)에서 직접적인 광전송이 비용·환경 측면에서 유리함을 강조한다.
**1) 시스템 구성**
- **송신부(Tx)**: 수중 센서에 부착된 LED(광대역, 저전력)이며, 광출력은 환경에 미치는 영향을 최소화하기 위해 제한된다.
- **수신부(Rx)**: UAV에 탑재된 실리콘 포톤멀티플라이어(SiPM)로, 단일광자 감지와 높은 내부 이득을 제공한다.
- **운용 조건**: 야간에 전송하여 태양광 배경노이즈를 최소화하고, UAV는 수면 위 일정 고도(d_air)에서 정지 비행한다.
**2) 채널 모델링**
채널 손실 h는 두 부분으로 분리된다: h = h_α · h_MC.
- **h_α (UAV 기울기에 의한 손실)**: 풍속에 따른 난류를 Dryden 스펙트럼으로 모델링하고, 이를 UAV의 회전각(tilt) 확률분포로 변환한다. 회전각이 수신기 시야(FoV)를 초과하면 신호가 차단되므로, 기하학적 손실을 폐쇄형 식으로 도출하였다. 이 식은 풍속, UAV 고도, FoV를 입력 변수로 하여 실시간 손실 예측이 가능하도록 설계되었다.
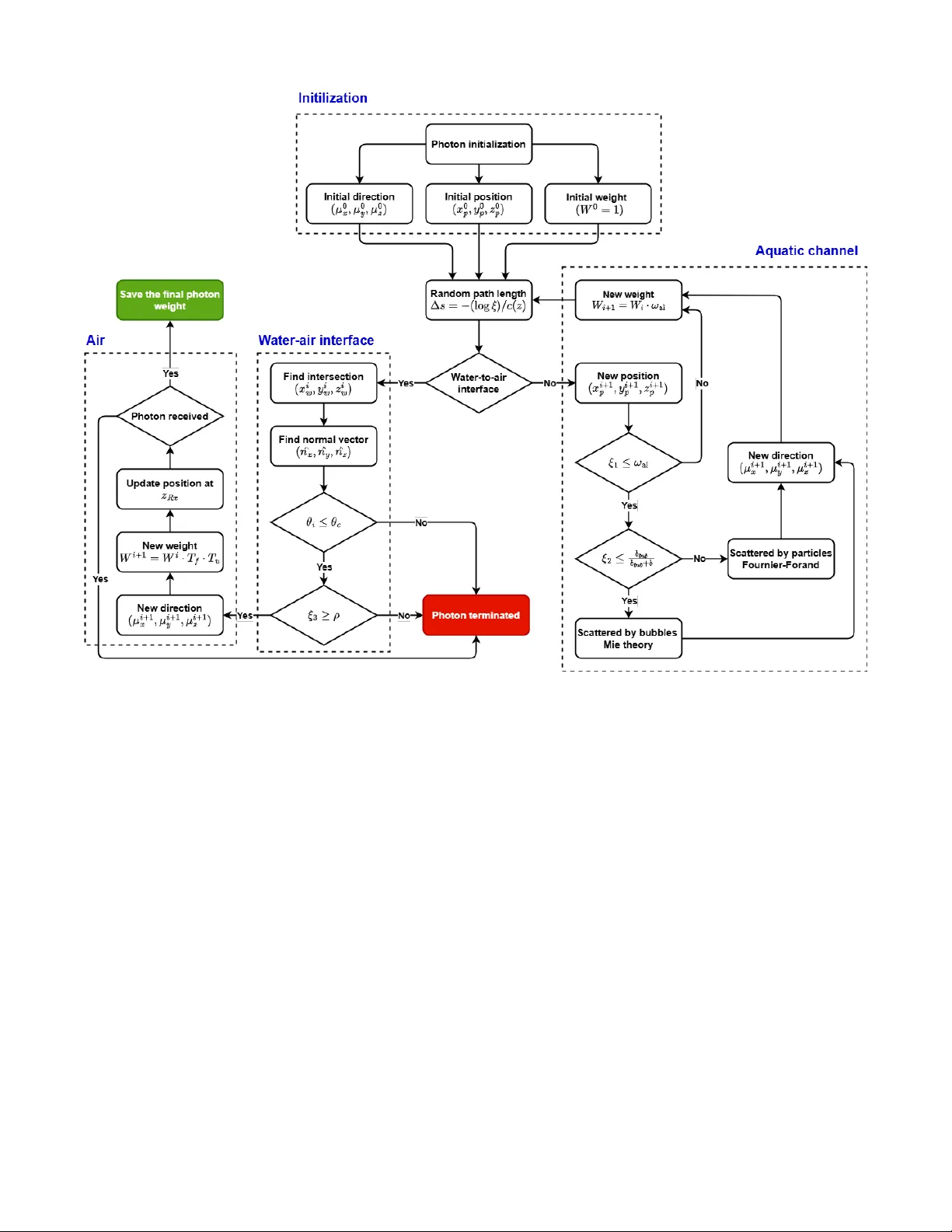
- **h_MC (물속·수면·기포 복합 손실)**: Monte Carlo 레이 트레이싱을 기반으로 광자 전파를 시뮬레이션한다.
- *물속 전파*: 물의 흡수·산란 계수는 Jerlov 해양 물 모델을 기반으로 하며, 입자 분포는 깊이와 무관하게 균일하다고 가정한다.
- *기포 효과*: Hall‑Novarin(HN) 모델을 이용해 깊이에 따른 기포 농도를 정의하고, Mie 이론을 적용해 각 기포 크기에 대한 산란 효율을 계산한다.
- *수면 파도*: JONSWAP 스펙트럼을 사용해 파고, 주기, 풍향 등을 파라미터화하고, 파도면을 3‑D 격자 형태로 재구성한다. 파도면을 통과하는 광자는 굴절·반사·산란을 겪으며, 이 과정이 Monte Carlo 시뮬레이션에 포함된다.
**3) 시뮬레이션 및 성능 평가**
다양한 파라미터 조합에 대해 채널 전송 손실과 BER을 평가하였다. 주요 변수는 다음과 같다.
- **풍속**: 0–20 m/s 범위, Dryden 모델에 따라 UAV 기울기 표준편차가 증가.
- **LED 발산각(θ_div)**: 5°, 10°, 20° 등, 발산각이 넓을수록 파도와 기포에 의한 손실이 감소하지만 수신기 정렬 요구가 완화된다.
- **수신기 FoV**: 10°, 20°, 30° 등, FoV가 넓을수록 UAV 기울기에 대한 내성이 향상된다.
- **수심(d_water)** 및 **UAV 고도(d_air)**: 5–50 m, 10–30 m 범위에서 조사.
시뮬레이션 결과는 다음과 같다.
- 파도·기포가 강해질수록 평균 채널 손실이 5–12 dB 증가하고, 특히 30 m 이상의 파고에서는 손실이 급격히 상승한다.
- 풍속 10 m/s 이하에서는 UAV 기울기에 의한 추가 손실이 1–2 dB에 머물지만, 20 m/s 이상에서는 5 dB 이상으로 급증한다.
- LED 발산각을 10° 이하, 수신기 FoV를 20° 이상으로 설계하면, 1 Mbps 이하 데이터 전송에서 BER < 10⁻⁶을 달성할 수 있다.
- 깊이 30 m 이하, UAV 고도 15 m, 풍속 5 m/s 조건에서는 전체 채널 손실이 약 18 dB이며, 이는 SiPM의 고감도 특성으로 충분히 보상 가능함을 보여준다.
**4) 기여 및 의의**
- 근해 환경에 특화된 JONSWAP 기반 파도 모델을 최초로 W2A 광채널에 적용하였다.
- 기포에 대한 HN·Mie 복합 모델을 Monte Carlo 시뮬레이션에 통합해, 실시간 물속 산란을 정밀하게 예측한다.
- UAV 진동을 Dryden 스펙트럼으로 모델링하고, 이를 기반으로 한 폐쇄형 기울기 손실식을 제시함으로써, 풍속 변화에 대한 시스템 설계 가이드를 제공한다.
- 전체 시스템을 종합적으로 평가해, 얕은 해양에서 저전력 LED와 고감도 SiPM을 이용한 실용적인 데이터 수집이 가능함을 입증하였다.
**5) 향후 연구 방향**
실험적 검증을 위해 해양 현장 시험대(예: 해양 연구 플랫폼)에서 실시간 파도·기포·UAV 동요 데이터를 수집하고, 시뮬레이션 결과와 비교할 계획이다. 또한, 다중 센서·다중 UAV 네트워크를 고려한 MIMO 기법과 오류 정정 코딩을 적용해 전송 효율을 더욱 향상시키는 방안을 탐색한다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기