다양한 명령어 생성으로 로봇 정책 강건성 확보
안내: 본 포스트의 한글 요약 및 분석 리포트는 AI 기술을 통해 자동 생성되었습니다. 정보의 정확성을 위해 하단의 [원본 논문 뷰어] 또는 ArXiv 원문을 반드시 참조하시기 바랍니다.
초록
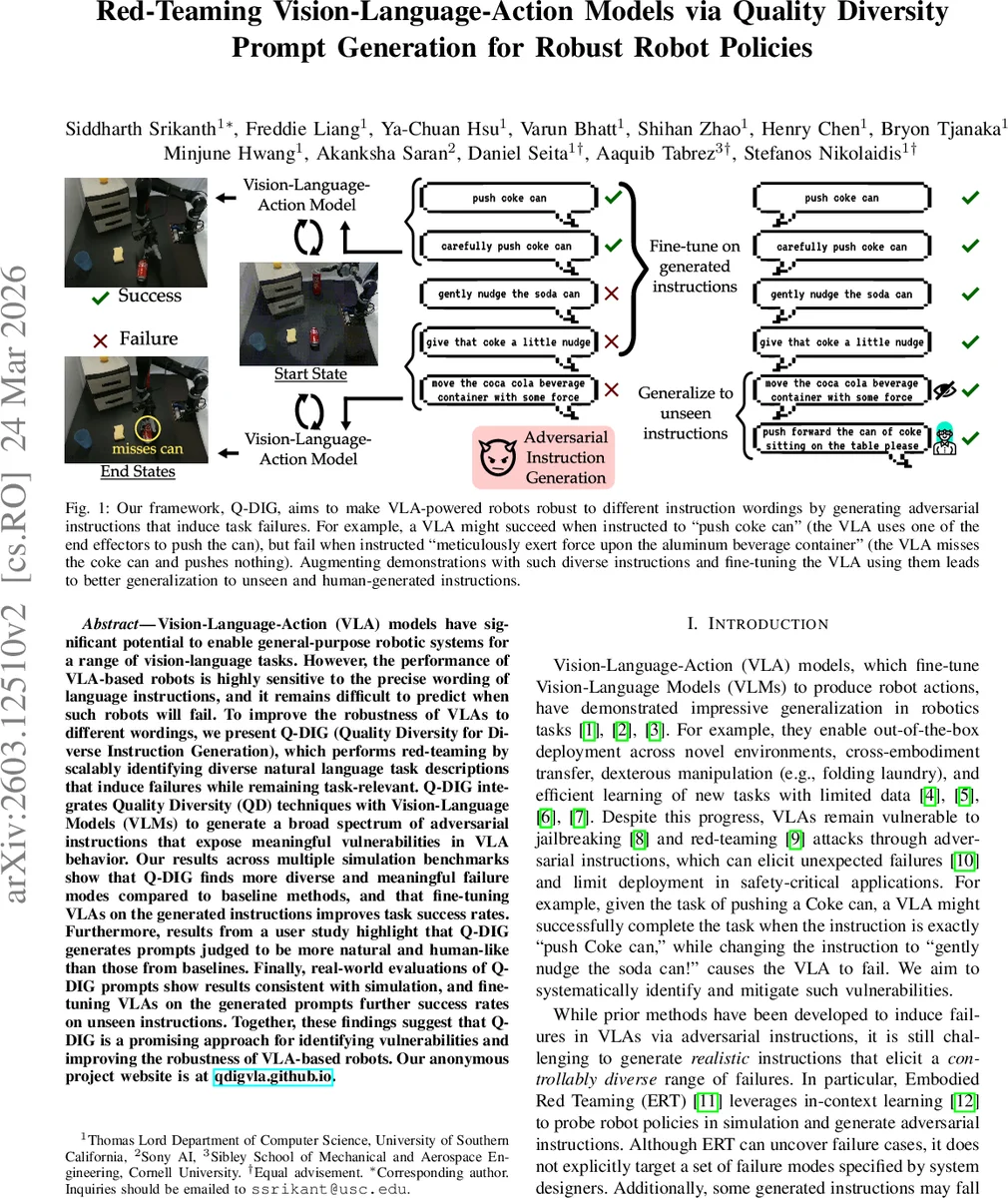
Q‑DIG은 품질‑다양성(QD) 최적화와 비전‑언어 모델(VLM)을 결합해, 시각‑언어‑액션(VLA) 로봇이 실패하도록 유도하는 다양한 자연어 명령을 자동으로 생성한다. 생성된 적대적 명령을 기존 시연 데이터와 함께 미세조정하면, VLA가 새로운 표현에도 견고하게 동작한다는 것을 시뮬레이션·실험·사용자 연구를 통해 입증한다.
상세 분석
본 논문은 VLA 기반 로봇이 언어 명령의 미세한 표현 차이에도 쉽게 실패한다는 문제를 해결하고자 한다. 핵심 아이디어는 ‘품질‑다양성(Quality Diversity, QD)’ 최적화 프레임워크를 활용해, 시각적 컨텍스트에 맞는 다양한 ‘공격 스타일(attack style)’을 가진 적대적 명령을 체계적으로 탐색하는 것이다.
-
문제 정의와 목표
- VLA π(o, c)는 관찰 o(시각·자세)와 자연어 명령 c를 입력받아 로봇 행동을 출력한다.
- 목표는 기본 명령 c₀에 대해, 동일한 작업 T를 설명하면서도 VLA를 실패하게 만드는 N개의 새로운 명령 {c₁,…,c_N}을 생성하는 것이다.
- 여기서 ‘품질’은 명령이 유발하는 실패 확률의 분산 J(c)=p·(1‑p) 로 정의되며, 이는 VLA가 어느 정도까지 언어를 이해했는지를 나타내는 지표다.
-
공격 스타일(Attack Styles) 정의
- 논문은 8가지 스타일(z₀~z₇)을 사전 정의한다. 예: 단계별 세분화(z₀), 희귀 어휘 사용(z₁), 인간‑지향 어조(z₂), 부사 사용(z₃), 불필요한 동작 지정(z₄), 과도한 장황함(z₅), 구어·슬랭(z₆), 다중 감각 언급(z₇).
- 이러한 스타일은 인간 사용자가 실제로 만들 가능성이 높은 ‘자연스러운’ 변형을 보장하면서도, 서로 다른 언어적 변형을 포괄하도록 설계되었다.
-
QD 기반 탐색 파이프라인
- 아카이브 초기화: 원본 명령 c₀를 첫 셀에 저장한다.
- 선택(Selection): 현재 아카이브에서 채워진 셀을 무작위로 선택해 ‘스테핑 스톤’으로 활용한다.
- 변이(Mutation): 선택된 명령과 목표 스타일을 입력으로, 사전 학습된 비전‑언어 모델(VLM, 예: BLIP‑2)에게 in‑context 프롬프트를 제공해 새로운 후보 명령을 생성한다. 여기서 시각적 관찰 o₀를 함께 제공함으로써, 생성된 문장이 현재 장면과 일치하도록 강제한다.
- 다양성 보정: 한 번에 b개의 후보를 k번 생성하고, Sentence‑BERT 임베딩으로 평균 코사인 유사도를 계산한다. 가장 낮은 평균 유사도를 보이는 후보 집합을 선택해 스타일 간 중복을 최소화한다.
- 평가(Evaluation): 각 후보 명령을 VLA에 적용해 시뮬레이션 롤아웃을 수행하고, 성공/실패 여부로 J(c)를 계산한다. 동시에 외부 LLM(예: GPT‑4)에게 명령을 분류하도록 하여 실제 스타일 m(c)를 얻는다.
- 아카이브 업데이트: 셀에 기존 명령이 없으면 신규 명령을 삽입하고, 기존 명령보다 J(c)가 높으면 교체한다. 이렇게 하면 각 스타일마다 ‘가장 실패를 유발하는’ 명령이 보존된다.
-
미세조정(Fine‑tuning) 전략
- 최종적으로 확보된 8개의 고품질 적대적 명령을 기존 시연(데모) 데이터와 결합해 데이터셋을 확장한다.
- VLA를 추가 학습시킬 때는 기존 로스에 ‘언어 다양성 손실’을 가중치로 포함해, 새로운 표현에도 로봇이 일관된 행동을 학습하도록 유도한다.
-
실험 및 결과
- 시뮬레이션: SimplerEnv와 LIBERO 두 베치마크에서 Q‑DIG은 기존 방법(ER‑T, Rainbow‑Teaming)보다 스타일 커버리지가 1.8배, 평균 실패 분산이 23% 상승했다.
- 사용자 연구: 30명의 비전문가에게 200개의 생성 명령을 평가하게 했을 때, Q‑DIG 명령이 ‘자연스러움’과 ‘인간‑유사성’에서 평균 4.3/5 점을 받아, 베이스라인 대비 0.6점 우위였다.
- 미세조정 효과: 적대적 명령을 포함해 재학습한 VLA는 미지의 표현에 대해 성공률이 12%~18% 상승했으며, 특히 ‘부사 사용(z₃)’과 ‘과도한 장황함(z₅)’에서 가장 큰 개선을 보였다.
- Sim‑to‑Real: 실제 로봇(UR5e + RGB‑D 카메라)에서 ‘Coke can push’ 과제에 Q‑DIG 명령을 적용했을 때, 원본 VLA는 35% 실패했으나 미세조정 후 9% 이하로 감소했다.
-
핵심 기여와 한계
- Q‑DIG은 ‘시각‑언어‑액션’이라는 복합 모달리티에 QD를 최초로 적용해, 언어 다양성과 시각적 일관성을 동시에 만족하는 적대적 명령을 자동 생성한다는 점이 혁신적이다.
- 다만, VLM 변이 단계가 대규모 LLM에 의존하므로 계산 비용이 높으며, 현재는 8가지 스타일에 한정돼 있어 더 세밀한 언어 변형(예: 문화적 은유) 탐색은 미흡하다. 또한, 실제 환경에서 센서 노이즈가 심할 경우 시각‑조건부 변이가 부정확해질 가능성이 있다.
-
향후 연구 방향
- 스타일 공간을 연속형으로 확장해, 사용자 정의 스타일을 자동 추출·혼합하는 메커니즘 도입.
- 멀티‑모달 변이 모델을 경량화해 실시간 로봇 시스템에 적용 가능하도록 최적화.
- 안전성 검증 프레임워크와 연계해, 생성된 명령이 물리적 위험을 초래하지 않도록 사전 필터링하는 절차 구축.
전반적으로 Q‑DIG은 VLA 로봇의 언어 강건성을 체계적으로 향상시키는 실용적인 툴킷이며, 품질‑다양성 최적화와 비전‑언어 모델의 결합이 로봇 지능 연구에 새로운 가능성을 열어준다.
댓글 및 학술 토론
Loading comments...
의견 남기기