과거를 기억하는 로봇: 유체 와류 예측을 위한 메모리 기반 모델
초록
**
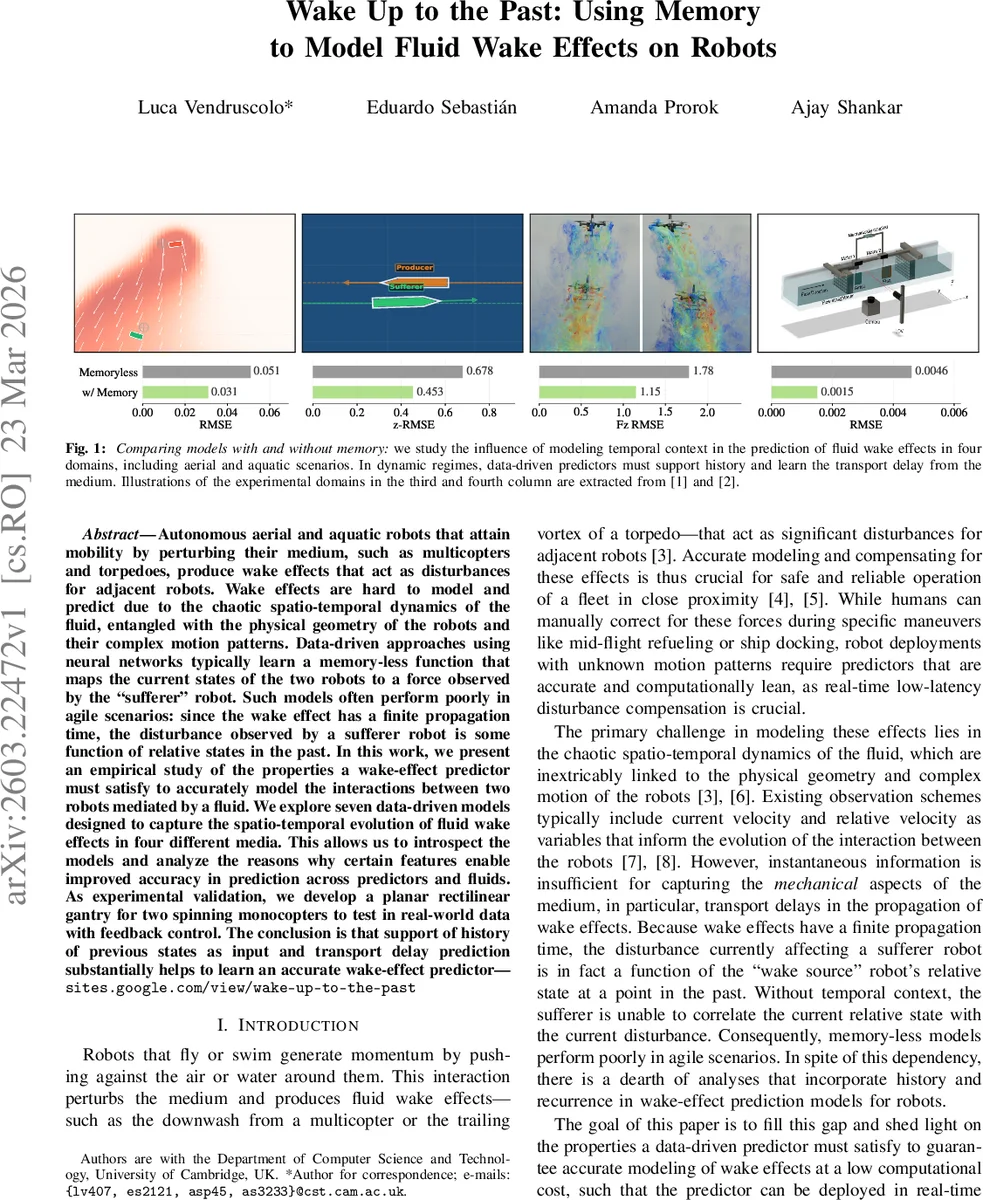
본 논문은 로봇 간 유체 와류가 전파되는 지연 시간을 고려하지 않으면 정확한 힘 예측이 어려움을 지적한다. 7가지 신경망 구조를 4개의 시뮬레이션·실험 환경에 적용해 과거 상태 입력과 전파 지연 예측이 성능을 크게 향상시킴을 실증하였다. 실제 두 대의 모노콥터를 이용한 실험에서도 히스토리 기반 모델이 가장 낮은 오차를 보였다.
**
상세 분석
**
와류 현상은 유체의 비선형, 혼돈적 흐름과 로봇의 기하·운동학이 얽혀 있기 때문에 순간적인 상대 상태만으로는 충분히 설명되지 않는다. 특히 고속·민첩한 비행·수중 상황에서는 와류가 매질을 통해 전파되는 Δt 라는 유한 지연이 존재한다. 논문은 이 점을 “시간적 컨텍스트 부족”이라고 정의하고, 이를 보완하기 위한 두 가지 핵심 설계 원칙을 제시한다. 첫째, 입력에 과거 스냅샷을 포함해 히스토리를 제공한다(History MLP, Delay Embedding 등). 둘째, 모델 내부에 전파 지연을 명시적으로 학습하도록 한다(Delay Embedding의 가우시안 선택기, Cross‑Attention의 쿼리‑키 메커니즘 등).
7가지 아키텍처는 크게 세 그룹으로 나뉜다. Memoryless Agile MLP는 현재 상태만을 사용해 즉시 매핑을 수행한다. Explicit History 모델은 과거 데이터를 평탄화하거나 선택적으로 추출해 입력에 직접 넣는다. Recurrent 모델(GRU, TCN, Mamba, ESN, Cross‑Attention)은 내부 은닉 상태 혹은 어텐션을 통해 시간 정보를 압축한다. 각 모델은 파라미터 수를 100 k 이하로 제한하고, Optuna 기반 베이지안 최적화로 하이퍼파라미터를 튜닝하였다.
실험은 네 가지 도메인(고성능 CFD 기반 쿼드콥터, 선박‑선박 CFD, 물고기 군집 수치 데이터, 2D 다운워시 시뮬레이터)과 실제 모노콥터 실험으로 구성된다. 결과는 RMSE 기준으로 일관되게 히스토리·지연 모델이 Memoryless MLP를 능가함을 보여준다. 특히 Delay Embedding 과 Cross‑Attention 은 전파 지연을 학습하는 메커니즘 덕분에 가장 낮은 오차를 기록했다. TCN과 GRU도 충분한 수용 영역을 확보하면 경쟁력 있는 성능을 보였지만, 파라미터 효율성 측면에서는 Mamba (9 k 파라미터)와 Delay Embedding (35 k) 정도가 최적이라고 할 수 있다.
실제 모노콥터 실험에서는 히스토리를 0.12 s(≈24 프레임)까지 포함했을 때, 제어 루프에 삽입된 예측이 목표 궤적 오차를 0.031 m에서 0.051 m로 감소시켰다. 이는 실시간 제어 수준에서도 메모리 기반 모델이 충분히 가벼우며, 전파 지연을 고려한 예측이 로봇 군집 운용의 안전성과 효율성을 크게 향상시킬 수 있음을 증명한다.
결론적으로, 유체 매질을 매개로 하는 로봇 간 상호작용을 모델링할 때는 (1) 과거 상태를 입력에 포함하고, (2) 매질 전파 지연을 명시적으로 학습하도록 설계된 구조가 필수적이다. 이러한 설계 원칙은 항공·수중·해양·생체 모방 로봇 등 다양한 분야에 일반화될 수 있다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기